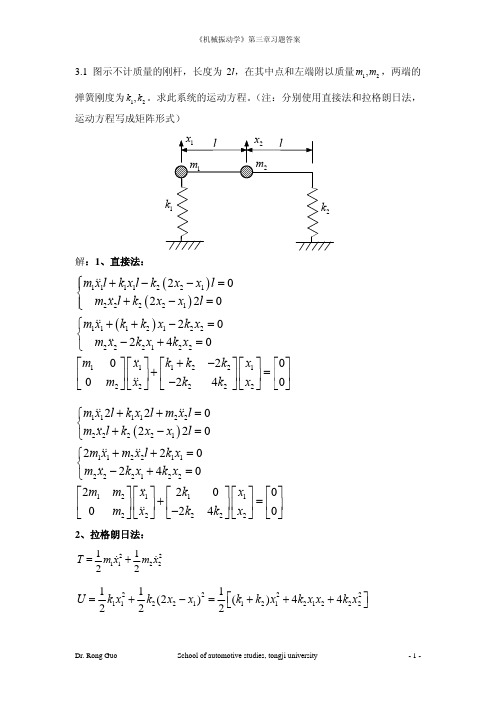
第3章 多自由度线性振动
合集下载
机械动力学第三章——多自由度振动-无阻尼振动
[ A ] ( r ) T [ k ] [ A ] ( s ) r 2 [ A ] ( r ) T [ m ] [ A ] ( s )
对于ωs: s 2 [m ][A ](s) [k ][A ](s) 0
[ A ] ( r ) T [ k ] [ A ] ( s ) s 2 [ A ] ( r ) T [ m ] [ A ] ( s )
10
无阻尼自由振动
1
1 k/m, 21.732 k/m, 32 k/m
[ A ](1)
2
1 ห้องสมุดไป่ตู้
模态图形:
1
1
[ A (2)]
0
[ A (3) ]
1
1
1
第一阶模态:
2
1
1
无节点
第二阶模态: 第三阶模态:
1 1
1
1
-
1
一个节点 两个节点
11
无阻尼自由振动
假设有两个频率 ωr 和 ωs ,他们分别对应了一个模态向量
c 1 [ A ] ( 1 ) s i n (1 t 1 ) c 2 [ A ] ( 2 ) s i n (2 t 2 ) c n [ A ] ( n ) s i n (n t n ) 其中,未知数包含2n个:
c 1 ,c 2 ,,c n ;1 ,2 ,,n
其中,未知数由2n个初始条件决定:
(1)
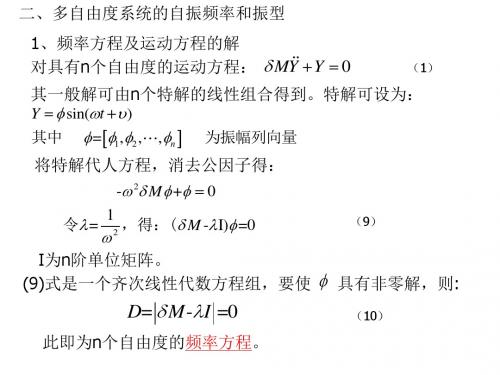
[m]为n*n维质量矩阵, [k] 为n*n维刚度矩阵,其中 [x] 为 n 维列向量。 设方程的解为
[x] [A ]sin(t )
(2)
[A]为n维列向量。将式(2)带入式(1),得:
( [ k ] 2 [ m ] ) [ A ] 0 |[ k ] 2 [ m ] | 0
第3章 多自由度机械振动系统 作业答案
⎤ ⎡ x1 ⎤ ⎡ p1 ( t ) ⎤ ⎢x ⎥ = ⎢ p t ⎥ − k3 ⎥ ⎥ ⎢ 2 ⎥ ⎢ 2 ( )⎥ k3 + k 4 ⎥ ⎦⎢ ⎣ x3 ⎥ ⎦ ⎢ ⎣ p3 ( t ) ⎥ ⎦ 0
d ∂T ∂T ∂U ∂D ( )− + + = Qi i ∂qi ∂qi ∂q i dt ∂q
2、拉格朗日法:
1 1 2 12 + m2 x 2 T = m1 x 2 2
U=
1 2 1 1 2 ⎤ k1 x1 + k2 (2 x2 − x1 ) 2 = ⎡ (k1 + k2 ) x12 + 4k2 x1 x2 + 4k2 x2 ⎣ ⎦ 2 2 2
Dr. Rong Guo
School of automotive studies, tongji university
⎡ k1r 2 K =⎢ 2 ⎣ − k1r
⎡3 2 ⎢ 2 Mr ⎢ ⎢ 0 ⎢ ⎣ 0
⎤ ⎥ ( k1 + k2 ) r 2 ⎦ − k1r 2
− k1r 2 ⎤ ⎡θ1 ⎤ ⎡0 ⎤ ⎥⎢ ⎥ = ⎢ ⎥ θ 2 ⎦ ⎣0 ⎦ ( k1 + k2 ) r 2 ⎦ ⎣
⎤ ⎤ ⎡ k1r 2 ⎥ ⎡θ ⎥ ⎢ 1 ⎥ + ⎢ 3 −k r 2 θ Mr 2 ⎥ ⎣ 2 ⎦ ⎣ 1 ⎥ ⎦ 2
x1 2l + k1 x1 2l + m2 x2l = 0 ⎧m1 ⎨ ⎩m2 x2l + k2 ( 2 x2 − x1 ) 2l = 0 x1 + m2 x2l + 2k1 x1 = 0 ⎧2m1 ⎨ x2 − 2k2 x1 + 4k2 x2 = 0 ⎩ m2 ⎡ 2m1 ⎢ 0 ⎣ m2 ⎤ ⎡ x1 ⎤ ⎡ 2k1 ⎢ ⎥ + ⎢ −2 k m2 ⎥ x 2 ⎦⎣ 2⎦ ⎣ 0 ⎤ ⎡ x1 ⎤ ⎡0 ⎤ ⎢ x ⎥ = ⎢0 ⎥ 4k 2 ⎥ ⎦⎣ 2⎦ ⎣ ⎦
第六讲--多自由度系统振动-2
解: 1)求柔度系数
m
31
k/5
m
21
k/3
P=1
2m k
11
32 4
P=1
22 4 12
P=1
33 9
23 4 13
11 1/ k 21 31 11
22
1 k
1 k /3
4
22
1 k
1 k/3
1 9
k /5
3.3.1 柔度法
1 1 1
柔度矩阵: [ ] 1 4 4
1 4 9
2)求频率
2 0 0
质量矩阵: [M] m 0 1 0
0 0 1
由频率方程: M I 0
2 1 1 m 2 4 4 0 ,
2 4 9
展开式为: 3 15 2 42 30 0
1 m m2
方程三个根为: 1 11.601 2 2.246 3 1.151
三个频率为:
1 0.2936
k m
4Y
4 4
3.4.1 主振型矩阵与正则坐标
(2)正则坐标 任意一个质点的位移 y 都可按主振型来组合:
y1 1Y11 2Y12 3Y13 y2 1Y21 2Y22 3Y23
yi 1Yi1 2Yi2 3Yi3
yn 1Yn1 2Yn2 3Yn3
nY1n nY2n
y1
y2
Y1 Y121
Y YYY132111
Y2 1
Y2 2
Y32
Y3 1
Y3 2
Y33
Y14 Y4
2
Y34
Y41
Y2 4
Y3 4
Y44
主 振
型 矩 阵
第一振型
1
第三章 多自由度系统振动22
3.3 多自由度系统的动力响应 一、振型分解法 多自由度结构的无阻尼强迫振动微分方程:
由于K是非对角矩阵,故此方程一般是联立的,或者说是偶联 的。当荷载为一般荷载时,这种偶联方程组的求解比较麻烦。 振型分解法:利用主振型的正交性,通过坐标变换,将原来偶 联的方程变为相互独立的方程,从而求得解的方法。 二、坐标变换 T 多自由度系统中,位移向量 Y = y1 , y2 , , yn 称为几何坐标或物 理坐标,它可以按振型展开,写成各个振型的线性叠加形式:
k ) 1 ( k ) 0( k ) =-(L(00 ) L01
(19)
k = 1
(k ) T 0
3)振型的正交性
2 对于 i 有: (K i M )i 0 ,对 j 有: ( K j 2 M ) j 0
T T ( ) ( ) 以 j 和 i 分别左乘以上两式,得:
令 N(k) M -k I N(k) k =0 (13) ( 14) 上式可写成 由于 N(k) =0
故(14)式只有n-1个方程是独立的,故只能求 k 的相对值。
Aik A 若 ik ik 现取 ik 1,则 ik A1k 称 k 为规准化振型。
(3)规准化振型的求解 将规准化后的振型代入(14)式,展开后得: (k ) (k ) k) N11 1 0 N12 N1(n (k ) 0 (k ) (k ) N N N 22 2n 2k 21 (k ) (k ) (k ) N N N n2 nn n1 nk 0
写成分块矩阵 (k ) (k ) N11 1 0 N10 (k ) (k ) (k ) N01 N00 0 0
机械振动学(第三章)-多自由度振动系统

装备制造学院
College of Equipment Manufacture
利用直接法,对下图所示的三自由度振动系统建立微分方程。。
装备制造学院
College of Equipment Manufacture
解:1)受力分析 选取 m1, m2和m3离开平衡位置的坐标x1, x2和 x3 为3 个独立 坐标。受力分析如图所示 2)建立振动微分方程 (c c ) x c x ( k k ) x k x p (t ) x m1: m 2 2 2 2 2 ( c 2 c 3 ) x 2 c2 x 1 c 3 x 3 ( k 2 k 3 ) x 2 k 2 x1 k 3 x 3 p 2 ( t ) x m2: m 2 2 2 2 3 c 3 x 3 c3 x 2 k 3 x3 k 3 x 2 p 3 (t ) x m3: m 3
装备制造学院
College of Equipment Manufacture
本章结束
装备制造学院 College of Equipment Manufacture
3 )如果将应为能量耗散函数 D 引起的阻尼力也从其他的非势 力的广义力中分离出来,并使Qi仅代表外部作用的广义激振力, 则可将非保守系统的拉格朗日方程改为:
d dt ( T i q ) T i q U qi D i q Q i ( i 1, 2 , 3 ,...., n )
车 身 车 轮 二 自 由 度 振 动 问 题
装备制造学院
College of Equipment Manufacture
装备制造学院
College of Equipment Manufacture
多自由度系统振动

系统在各个坐标上都是按相同频率及初相位作简谐振动。
(2)半正定系统
可能出现形如 的同步运动。
也可能出现形如 的同步运动
主振动
首先讨论正定系统的主振动:
M 正定,K 正定
主振动:
正定系统:
或
当 不是重特征根时,可以通过 B 的伴随矩阵 求得相应的主振型 。
根据逆矩阵定义 :
两边左乘 :
当 时 :
或
的任一非零列都是第 i 阶主振动
主振动的伴随矩阵求法:
伴随矩阵:矩阵A中的元素都用它们在行列式A中的代数余子式替换后得到的矩阵再转置,这个矩阵叫A的伴随矩阵。 A与A的伴随矩阵左乘、右乘结果都是主对角线上的元素全为A的行列式的对角阵。
画图: 横坐标表示静平衡位置,纵坐标表示主振型中各元素的值。
第一阶主振动:
m
2m
两个质量以w1为振动频率,同时经过各自的平衡位置,方向相同,而且每一时刻的位移量都相同。
同向运动
画图: 横坐标表示静平衡位置,纵坐标表示主振型中各元素的值
m
2m
第二阶主振动:
两个质量以w2为振动频率,同时经过各自的平衡位置,方向相反,每一时刻第一个质量的位移都第二个质量的位移的两倍。
设最后一个方程不独立,把它划去,并且把含有 的某个元素(例如 )的项全部移到等号右端.
当 不是特征多项式的重根时,上式 n 个方程中有且只有一个是不独立的 。 设最后一个方程不独立,把它划去,并且把含有 的某个元素(例如 )的项全部移到等号右端 。 若这个方程组左端的系数行列式不为零,则可解出用 表示的 否则应把含 的另一个元素的项移到等号右端,再解方程组。 多自由度系统振动 / 多自由度系统的自由振动/模态 n -1个方程 非奇次方程组
(2)半正定系统
可能出现形如 的同步运动。
也可能出现形如 的同步运动
主振动
首先讨论正定系统的主振动:
M 正定,K 正定
主振动:
正定系统:
或
当 不是重特征根时,可以通过 B 的伴随矩阵 求得相应的主振型 。
根据逆矩阵定义 :
两边左乘 :
当 时 :
或
的任一非零列都是第 i 阶主振动
主振动的伴随矩阵求法:
伴随矩阵:矩阵A中的元素都用它们在行列式A中的代数余子式替换后得到的矩阵再转置,这个矩阵叫A的伴随矩阵。 A与A的伴随矩阵左乘、右乘结果都是主对角线上的元素全为A的行列式的对角阵。
画图: 横坐标表示静平衡位置,纵坐标表示主振型中各元素的值。
第一阶主振动:
m
2m
两个质量以w1为振动频率,同时经过各自的平衡位置,方向相同,而且每一时刻的位移量都相同。
同向运动
画图: 横坐标表示静平衡位置,纵坐标表示主振型中各元素的值
m
2m
第二阶主振动:
两个质量以w2为振动频率,同时经过各自的平衡位置,方向相反,每一时刻第一个质量的位移都第二个质量的位移的两倍。
设最后一个方程不独立,把它划去,并且把含有 的某个元素(例如 )的项全部移到等号右端.
当 不是特征多项式的重根时,上式 n 个方程中有且只有一个是不独立的 。 设最后一个方程不独立,把它划去,并且把含有 的某个元素(例如 )的项全部移到等号右端 。 若这个方程组左端的系数行列式不为零,则可解出用 表示的 否则应把含 的另一个元素的项移到等号右端,再解方程组。 多自由度系统振动 / 多自由度系统的自由振动/模态 n -1个方程 非奇次方程组
第3章多自由度线性系统的振动
1 1 1
k1 k1 k1
k1 1 + 1 k1 k2 1 + 1 k1 k2
1
k1 m1 0 1 + 1 k1 k2 1 + 1 + 1 0 k1 k2 k3 1
0 m2 0
x &&1 x1 0 && + x = 0 x2 2 m3 &&3 x3 0 x 0 0
三自由度系统 在质量m 上施加单位力,质量m 的位移: 在质量 1上施加单位力,质量 1 、 m2和m3的位移: x1=1/k1 , x2=1/k1 , x3=1/k1 ,即h11= h21= k31= 1/k1 ; 在质量m2上施加单位力,质量 1 、 m2和m3的位移: x1=1/k1 , x2=1/k1+1/k2, 的位移: 在质量 上施加单位力,质量m x3= 1/k1+1/k2,即柔度系数 12= 1/k1 , h22= k32= 1/k1+1/k2,; 即柔度系数h 在质量m 上施加单位力,质量m 在质量 3上施加单位力,质量 1 、 m2和m3的位移: x1=1/k1, x2=1/k1+1/k2, 的位移: x3=1/k1+1/k2 +1/k3。即柔度系数 1=1/k1 , x2=1/k1+1/k2, x3= 1/k1+1/k2 +1/k3 。 即柔度系数x 振动 微分 方程
k1 + k 2 + k 6 − k2 [K ] = − k6 0 − k2
− k6 − k3 k3 + k 4 + k5 + k6 − k5
第三章 多自由度系统的振动课件

有非零解的充要条件是 | A | 0
定义 奇次方程组(1)的一组解1,2,L ,t 称为(1)的一个基
础解系,如果
1.(1)的任一个解都能表示成 1,2,L ,t 的线性组合; 2. 1,2,L ,t 线性无关。
定理 在奇次方程组有非零解的情况下,方程组的基础解系所含解的
个数等于 nr。
r:
是系数矩阵的秩。
系统做第i阶固有振动时具有的振动形态,称为第i阶固有振型。虽 然各个坐标上振幅的精确值并没有确定,但是所表现的系统的振动 形态已经确定。
【问题】在已知固有频率求固有振型时,所得到的N个线性方程中有几个是独
立的? 结论:
(Kr2M)r 0
当<<振 动r 力不学是特>>征刘延方柱程第的7重4根页时).,上述方程只有N-1个方程是独立的(见
② 以广义坐标及广义速度来表示系统的动能,势能和耗散函数; ③ 对于非保守主动力,将其虚功写成如下形式
n
W Qi qi i 1
从而确定对应于各个广义坐标的非保守广义力;
⑤ 将以上各量代入Lagrange方程,即得到系统的运动方程.
上次课内容回顾
3. 用Lagrange方程建立系统运动微分方程的优点
理解固有振型
如何理解固有振型 从数学上看:固有振型是广义特征值问题的特征向量;
从物理上看:第i阶固有振型向量 i 中的一列元素,就是系统做 第i阶固有振动时各个坐标上位移(或振幅)的相对比值, i 描述了
系统做第i阶固有振动时具有的振动形态,称为第i阶固有振型。虽
然各个坐标上振幅的精确值并没有确定,但是所表现的系统的振动
(K2M)0
有非零
1
1 1
2
1
1
定义 奇次方程组(1)的一组解1,2,L ,t 称为(1)的一个基
础解系,如果
1.(1)的任一个解都能表示成 1,2,L ,t 的线性组合; 2. 1,2,L ,t 线性无关。
定理 在奇次方程组有非零解的情况下,方程组的基础解系所含解的
个数等于 nr。
r:
是系数矩阵的秩。
系统做第i阶固有振动时具有的振动形态,称为第i阶固有振型。虽 然各个坐标上振幅的精确值并没有确定,但是所表现的系统的振动 形态已经确定。
【问题】在已知固有频率求固有振型时,所得到的N个线性方程中有几个是独
立的? 结论:
(Kr2M)r 0
当<<振 动r 力不学是特>>征刘延方柱程第的7重4根页时).,上述方程只有N-1个方程是独立的(见
② 以广义坐标及广义速度来表示系统的动能,势能和耗散函数; ③ 对于非保守主动力,将其虚功写成如下形式
n
W Qi qi i 1
从而确定对应于各个广义坐标的非保守广义力;
⑤ 将以上各量代入Lagrange方程,即得到系统的运动方程.
上次课内容回顾
3. 用Lagrange方程建立系统运动微分方程的优点
理解固有振型
如何理解固有振型 从数学上看:固有振型是广义特征值问题的特征向量;
从物理上看:第i阶固有振型向量 i 中的一列元素,就是系统做 第i阶固有振动时各个坐标上位移(或振幅)的相对比值, i 描述了
系统做第i阶固有振动时具有的振动形态,称为第i阶固有振型。虽
然各个坐标上振幅的精确值并没有确定,但是所表现的系统的振动
(K2M)0
有非零
1
1 1
2
1
1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1
k 3k ,2 J J
多自由度系统的振动 令θ1、 θ2具有如下形式的解
经整理后写成矩阵的形式
(3.1.7)
KU 0 MU
式中: U——系统的广义坐标列阵 M——系统的质量矩阵
(3.1.8)
U x
T
m 0 M K——系统的刚度矩阵 0 J k1l1 k2l2 k1 k2 K 2 2 k l k l k l k l 11 2 2 11 2 2
y1 (0) Y11 , y2 (0) Y21
y1 (0)
Y12 k12 Y22 k11 2 2 m1
即第二振型
多自由度系统的振动
图示两个振型
1
第一主振型
2
第二主振型
多自由度系统的振动 例2 圆盘扭转系统,假定k1=k2 =k3=k,J1=J2=J,求其 固有频牢和主振型,并解释 其物理意义。
当F1(t)=F2(t)=0时,(3.1.2)式成为
Kx 0 Mx
(3.1.3)式即为系统的自由振动方程
(3.1.3)
多自由度系统的振动 如图所示为一个扭转振动系统。两圆盘转动惯量分别为J1、J2,各段 轴的扭转刚度分别为k1、k2、k3,在两个圆盘上作用有激振力矩T1 (t)、T2(t)。设立θ1、θ2两个广义坐标。
解:由上述假定,其自由振动方程成为
J 0
2k k 1 0 0 1 J 2 k 2k 2 0
2k J 2 k k 0 2 2k J
其特征方程为
可求出
1 2 n
称为一阶固有频率、二阶固有颁率…n阶固有频率。将ωi(i =1,2,…,。)代回式(3.2.2)就得到A的非零解,记 之为A(i),A(i)就是与ωi对应的特征矢量,它是一组振幅的相 对值,称为第i阶固有振型,也称为第i阶主振型。
多自由度系统的振动
例1 在图示悬臂梁中,有 集中质量m1和m2,不计梁 的质量,试求系统的固有 频率与振型。
式中A为振幅列阵,将式(a)对时间求两次导数,得到广义加速 度列阵 2 A sin(t ) (b) X 将式(a)、(b)代人式(3.2.1),得到
2 K MA0
(3.2.2)
这里导出的式(3.2.2)是一个以振幅列阵A为未知数的齐次线性 代数方程组,它在振动理论中有着重要的意义。其中矩阵K、M均为 已知矩阵。根据线性代数理论,方程(3.2.2)有非零解的条件是系统 矩阵的行列式等于零,即
(3.1.1)
x1 k1 k2 m1 0 0 m 2 x2 k2
或写成:
Kx F (t ) Mx
这就是这个二自由度系统的受迫振动方程。式中 x——系统的广义矩阵
(3.1.2)
x x1
x2
T
多自由度系统的振动 M——系统的质量矩阵
若不考虑阻尼,也可以用牛顿定律建立其振动方程。
k k ( ) T (t ) J1 1 1 1 2 1 2 1 J 2 2 k3 2 k2 (1 2 ) T2 (t )
多自由度系统的振动 经整理后写成矩阵的形式
det K 2 M 0
(3.2.3)
多自由度系统的振动
式(3.2.3)称为特征方程或频率方程。将其展开, 得到一个关于ω2的n次代数方程,它的根称为特征值。 特征值开平方即得到ω ——系统的固有频率。在质 量矩阵为正定矩阵,刚度矩阵为正定矩阵或半正定矩阵 的情况下,n个特征值均为非负实数。在大多数情况下, 这n个特征值互不相等,将其按大小排列起来
式中
KX 0 MX
X x1 )
X——广义坐标列阵
M、K——系统的质量矩阵和刚度矩阵,均为对称矩阵,质量矩
阵为正定矩阵,刚度矩阵为正定矩阵或半正定矩阵。
多自由度系统的振动
设方程(3.3.1)具有如下形式的解
X A sin(t )
(a)
2 解频率方程得 两个根: ,
1
(3.2.7)
2
,规定
1 2
1 -第一频率或基本频率, 2
-第二频率
多自由度系统的振动
(3)求振型
将 1 2
代入式(3.2.6),得
Y11 k12 2 Y21 k11 1 m1
质点
m1 , m2
的振动方程为
y1 (t ) Y11 sin(1t ) y2 (t ) Y21 sin(1t )
m11 m12 m1 0 M m m 0 m 21 22 2
K——系统的刚度矩阵
k11 k12 k1 k2 K k21 k22 k2
F(t)——系统的广义力矩阵
k2 k2 k3
T
F (t ) F1 (t ) F2 (t )
多自由度系统的振动
经整理写成矩阵形式:
m1 x1 k1 x1 k2 ( x1 x2 ) F1 (t ) m2 x2 k3 x2 k2 ( x1 x2 ) F2 (t ) k2 x1 F1 (t ) k2 k3 x2 F2 (t )
多自由度系统的振动 三、多自由度系统振动方程的特点
用牛顿定律建立二自由度振动系统微分方程的上述方法完全可以 推广到多自由度系统。其中的广义坐标列阵和广义力列阵均为n维列 阵,质量矩阵和刚度矩阵均为n×n矩阵。对于具有微小位移的线性弹 性系统,刚度矩阵和质量矩阵总是对称的。
二自由度广义坐标由一个增加到两个,其振动方程写成矩阵形 式后与单自由度系统的振动方程在形式上相类似,只是广义坐标 和广义力由一维扩展到多维,用质量矩阵和刚度矩阵代替了单自 由度方程中的质量和刚度系数。 但是,也有一个重要区别:二自由度系统的振动方程是一个微分方 程组,它由两个微分方程组成。一般情况下,在第一个方程中也含有第 二个广义坐标,在第二个方程中也含有第一个广义坐标。这种情况我们 称之为方程耦合。方程的耦合使我们无法利用单自由度系统的公式直接 地来求解多自由度系统的振动方程组中的每一个方程。
多自由度系统的振动 二、动力学方程的建立 将振动系统的力学模型简化后,就要建立系统的运动微分方程。最 常用的方法有:根据牛顿定律建立振动方程和用拉格朗日方程来导出振动 方程。本章介绍根据牛顿定律来建立方程的方法。首先看一个二自由度的 例子。 如图给出了弹簧连接的两个质量块组成的振动系统。系统在x轴向 运动,其质量分布为m1、m2,弹簧刚度分别为k1、k2、k3,作用于两 质量块上的激振力为F1(t)和F2(t)。设立两个广义坐标。不考虑阻 尼,用牛顿第二运动定律可建立运动方程
写成矩阵形式为:
Cx Kx F (t ) Mx
多自由度系统的振动
多自由度系统的振动 例2:用拉格朗日方程建立下图所示的热力发动机组的振动方程
多自由度系统的振动
多自由度系统的振动
§3.2 多自由度系统的自由振动
一、固有频率和主振型 上节得到了二自由度系统的自由振动方程式(3.1.3)、式 (3.1.6)。实际上,对于具有微小位移的n自由度线性弹性系统,其自由 振动方程都具有这一形式
T(t)——系统的广义力列阵
k 2 k2 k3
T
T (t ) T1 (t ) T2 (t )
当T1(t)=T2(t)=0时,(3.1.5)式成为
K 0 M
(3.1.6)式即为系统的自由振动方程
(3.1.6)
多自由度系统的振动
如图所示为汽车车体振动的简化 力学模型。在这里,不考虑零部 件的振动和车体的左右振动,只 研究车体在其对称平面内的振动。 将车体视为一刚体,将车轮部件 (包括轮胎和悬挂弹簧)视为无 质量弹簧。车体作上下垂直振动 和绕其质心的前后俯仰振动。
体系按 1 振动有如下特点: ①两质量同频同步
多自由度系统的振动
定义:体系上所有质量按相同频率作自由振动时的振动 形状称体系的主振型。这n个主振型线性无关 ③按第一振型自由振动的条件
y1 (0) Y11 Y11 Y21 Y 21 y ( 0 ) y2 (0) 2 ④振型与频率一样是体系本身固有的属性,与外界因素 无关。 同理,将 1 2 代入式得到
多自由度系统的振动
第三章 多自由度系统的线性振动
§3.1 多自由度系统振动方程的建立
§3.2 多自由度系统的自由振动
§3.3 多自由度系统的受迫振动
多自由度系统的振动
第三章 多自由度系统的振动
§3.1 多自由度系统振动方程的建立
一、力学模型的简化
工程中大多为多构件多部件的弹性系统,自由度往往为无限多, 但研究这种情况比较困难,因此要对其建立近似的数学模型。变无限 为有限,将无限多自由度系统离散为有限多自由度系统。有集中参数 法和有限单元法两种方法。 机械系统中有两类构件,一类是有较大的惯性和刚度,我们可以 视其为质量块而忽略其弹性;另一类视惯性较小柔度较大,可以视其 为无质量的弹簧。 把连续弹性体的分布质量用若干个集中质量代替,得到另一类集 中参数系统。
J1 0
或写为
k1 k2 0 1 J 2 2 k2
k2 1 T1 (t ) k2 k3 2 T2 (t )
(3.1.4)
K T (t ) M
多自由度系统的振动 例1:用牛顿第二定理建立下图所示的系统的振动方程
解:针对每一个集中质量,依据牛顿第二定理,可建立其平衡方程为:
mi xi ki ( xi xi 1 ) ki 1 ( xi 1 xi ) i x i 1 ) ci 1 ( x i 1 x i ) Fi (t ) ci ( x