智能清洁机程序
清洁机器人系统设计本科毕业设计

本科毕业设计(论文)清洁机器人系统设计毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
基于PLC的家用清扫机器人控制系统设计__开题报告
Chinese Journal of Aeronautics20,2007:266-271.
[9]宋章军,陈恳,杨向东. 基于红外测距传感器信息的通风管道清扫机器人控制算法研究[J],制造业自动化,2006,28(05):44-47.
2016年1月20日-2016年2月2日
学习掌握三菱PLC的基本编程。
给出硬件设计框图。
2016年2月3日-2016年4月6日
编写出了该控制系统的程序。
初步完成毕业设计相关内容,并进行中期检查。
2016年4月7日-2016年4月21日
完善程序、利PROTUES软件,整理仿真结果和论文文档。
完成论文初稿的书写。
2?拟采取的研究方法技术路线实施方案及可行性分析研究方法研究方法是利用创意之星模块化机器人套件在搭建一个家用清洁机器人的基础上先根据实际情况进行各个舵机的id和属性再通过northstar软件进行前进转向步态编程并将这些独立的方程块组合完成程序流程图的建立最后对程序进行编译并下载到控制器中根据距离传感器采集的数据进行相应的前进或转向并完成房间的清洁工作这里主要研究机器人的运动对机器人如何清洁杂物不做详细研究
日本日立公司于2003年5月29日宣布,成功研发出了家用清洁机器人,它具有在房间自由行走并打扫卫生的自律行走机器人。它的行走速度最快为40cm/s,它受遥控器以及机身按钮进行操作。它的主要特点是:在机身下设计了一个最大限度为5cm的可动吸尘孔,以便能够将房间角落打扫干净。该机器人采用了螺旋式行走方式,从房间外围开始进行清扫,以便使工作更有效率。该公司还计划在清洁机器人机身上安装CCD相机,以便远程监控。
海尔 G100258HBD12S 10公斤滚筒洗烘一体机 使用说明书
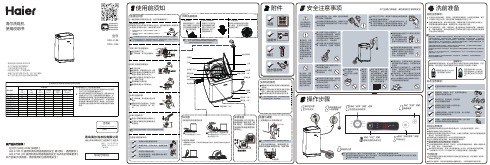
版次:2021年 第1版专用号: 0020508069AG 厂家代码:滚筒全自动洗衣机·使用前请仔细阅读本说明书·本公司保留说明书解释权·产品外观请以实物为准·阅后请与发票一并妥善保存·如遇产品技术或软件升级,恕不另行通知·本产品只适合在中国大陆销售和使用Q/0212HRM 005 《家用电动洗衣机》GB 4706.1 《家用和类似用途电器的安全 第1部分:通用要求》GB 4706.24 《家用和类似用途电器的安全 洗衣机的特殊要求》﹡GB 4706.20 《家用和类似用途电器的安全 滚筒式干衣机的特殊要求》·该产品执行标准:·本产品属于I类电器,请您使用时注意用电安全!G100258HBD12SG100258BD12S 使用说明书1.使用前须知2.安全注意事项3.使用注意事项4.洗前准备5.操作步骤6.控制面板及程序说明7.显示屏8.其它功能9.故障排除10.清洁/维护11.报修说明12.技术数据紫外除菌装置变频电机洗衣结束后,一段时间内无下一步操作洗衣机自动关机若需要设定智能投放功能,轻触“智能投放”按键进行设定启动程序打开电源开关·带﹡的标准只适用于洗干一体机型号!产生异味,取下来的分配器盒用水冲洗并擦干净再重新装好。
本机包含可回收利用材料,废弃时请正确处理,保护环境。
在洗衣机通电运行情况下,切不可进行上述操作!度、脱水转速、漂洗次数、报警信息。
本机有断电记忆功能,在洗衣过程中若突然停电或插头松脱,洗衣机可记忆程序运行状况,恢复供电开机后洗衣机将按照原程序继续工作。
断电记忆静音模式(1)在程序运行过程中,轻触“启动/暂停”键,旋转程序旋钮即可重新选择程序。
(2)在程序运行过程中,若需要选择附加功能,可按“启动/暂停”按键,然偏心保护脱水时,如果衣物分布不均匀,洗衣机将对衣物进行重新抖散、分布,当衣物分布均匀后再脱水;如果在规定时间内,衣物仍然没有分布均匀,为避免洗衣机的剧烈振动,洗衣机将不脱水,此时需要你检查衣物是否缠绕、打结,并对衣物进行重新整理,再选择“单脱水”程序进行脱水。
基于STM32单机的扫地机器人设计
基于STM32单机的扫地机器人设计1. 引言1.1 背景介绍扫地机器人是一种能够自动清扫地面垃圾和灰尘的智能机器人,可以帮助人们减轻日常清洁工作的负担。
随着科技的不断发展,扫地机器人越来越受到人们的关注和青睐,成为家庭清洁的新选择。
而基于STM32单机的扫地机器人设计则是利用STM32单片机作为控制核心,通过编程实现对扫地机器人的控制和运行。
STM32单片机是由意法半导体推出的一种嵌入式微控制器系列,具有高性能、低功耗、丰富的外设接口等特点,非常适合用于智能机器人的控制系统设计。
借助STM32单片机的强大功能和灵活性,设计出一款性能稳定、功能丰富的扫地机器人是完全可行的。
通过深入研究和设计,本文旨在探讨基于STM32单机的扫地机器人设计方案,从硬件设计、软件设计到系统集成,全面展示如何利用STM32单片机实现扫地机器人的智能化控制。
通过本文的研究,不仅可以为智能家居领域带来新的技术理念和解决方案,同时也可以提高人们生活质量和舒适度。
1.2 研究目的研究目的是为了通过基于STM32单机的扫地机器人设计,探索智能家居领域的发展趋势,提高家庭生活质量和便利性。
具体而言,本研究旨在利用STM32单片机的强大功能和稳定性,结合扫地机器人的设计要求,实现一个性能优越、智能化程度高、操作简便的扫地机器人。
通过该设计,可以在家庭环境中实现自动清扫功能,提高家庭生活质量,减轻家庭成员的家务负担。
研究过程中还将不断优化硬件设计和软件设计,探索系统集成的最佳方法,以提高产品的稳定性和可靠性,为智能家居领域的发展贡献力量。
通过本研究,希望能为未来智能家居设备的设计提供借鉴和参考,推动智能化生活的发展,满足人们对便利、舒适生活的需求。
1.3 研究意义研究意义是对于基于STM32单机的扫地机器人设计具有重要的意义。
随着人工智能和自动化技术的不断发展,扫地机器人作为智能家居的重要组成部分,具有广阔的市场前景和应用空间。
本研究通过基于STM32单机的设计方案,旨在提高扫地机器人的智能化水平和性能表现,为家庭、办公和商业场所的清洁工作提供更加高效和便捷的解决方案。
洗地机智慧清洁系统设计方案
洗地机智慧清洁系统设计方案智慧清洁系统是一种结合洗地机和智能技术的创新产品,可以提高清洁效率、降低人力成本、节约能源等优势。
下面是一个洗地机智慧清洁系统设计方案的概述。
1. 系统构成洗地机智慧清洁系统包括洗地机硬件、软件控制系统和数据分析平台三个主要部分。
- 洗地机硬件:采用先进的洗地机技术,包括高效的刷盘和吸水系统,以及先进的传感器和摄像头等设备。
- 软件控制系统:通过微控制器或工控机等设备,实现对洗地机的智能控制和管理。
可以设置清洁区域、清洁时间和清洁模式等参数,根据实际情况自动调整清洁路线和清洁力度。
- 数据分析平台:通过云计算和大数据分析技术,将洗地机的运行数据和清洁效果等信息进行收集、存储和分析。
可以根据历史数据和实时数据,对清洁任务进行智能调度和优化。
2. 系统功能洗地机智慧清洁系统具有以下功能:- 智能调度:根据清洁区域的大小和复杂程度,自动规划清洁路线和清洁时间。
避免重复清洁和遗漏清洁的问题,并根据实际情况调整清洁力度和清洁频率。
- 异常检测:通过传感器和摄像头等设备,实时监测洗地机的工作状态和清洁效果。
一旦发现异常,比如刷盘堵塞、吸水系统故障等,系统会自动发送警报并进行故障诊断。
- 数据分析:将洗地机的运行数据和清洁效果等信息进行收集、存储和分析。
可以生成清洁报告和运行统计,帮助用户了解清洁情况和洗地机的健康状况,以及进行清洁任务的调整和优化。
- 远程监控:用户可以通过手机应用或电脑连接到洗地机的控制系统,实时监控清洁任务的进度和清洁效果。
并可以进行远程控制和调整清洁参数。
- 节能环保:通过智能调度和清洁力度的调整,实现洗地机的精确清洁,避免资源浪费和环境污染。
3. 实施方案实施洗地机智慧清洁系统的具体步骤如下:- 设计清洁区域地图:根据实际情况,设计和划分清洁区域地图。
这可以通过传感器、摄像头和人工勘测等方式进行。
- 安装硬件设备:根据设计的清洁区域地图,安装洗地机硬件设备。
海尔 XQ1-J159 全自动球刷洗鞋机 使用说明书
·使用前请仔细阅读本说明书·本公司保留说明书解释权·产品外观请以实物为准·阅后请与发票一并妥善保存
·如遇产品技术或软件升级,恕不另行通知·本产品只适合在中国大陆销售和使用
型号
XQ1-J158 智能家电操控智慧场景定制智家商城购物家电报装报修
地址:青岛市高科技工业园海尔工业园内
青岛海尔洗衣机有限公司
版次:2021年 第2版专用号:0030821116厂家代码:
专用号条码
Q/0212HRE 008《洗鞋机》GB 4706.1《家用和类似用途电器的安全 第1部分:通用要求》GB 4706.24《家用和类似用途电器的安全 洗衣机的特殊要求》本产品属于I类电器,请您使用时注意用电安全!
使用说明书
海尔洗鞋机 XQ1-J159。
智能扫地机器人课程设计
智能扫地机器人课程设计智能扫地机器人课程设计1、课题背景及研究的目的和意义1.1课题背景扫地机器人是服务机器人的一种,可以代替人进行清扫房间、车间、墙壁等。
提出一种应用于室内的移动清洁机器人的设计方案。
其具有实用价值。
室内清洁机器人的主要任务是能够代替人进行清扫,因此需要有一定的智能。
清洁机器人应该具备以下能力:能够自我导航,检测出墙壁,房间内的障碍物并且能够避开;能够走遍房间的大部分空间,可以检测出电池的电量并且能够自主返回充电,同时要求外形比较紧凑,运行稳定,噪音小;要具有人性化的接口,便于操作和控制。
结合扫地机器人主要功能探讨其控制系统的硬件设计。
1.2研究目的和意义国家农业智能装备工程技术研究中心邱权博士说,扫地机器人可以看作是一种智能吸尘器,通过其基于传感器检测的智能运动规划算法使原本由人操作的吸尘器成为一个可自主运行的智能化设备。
它通过各种传感器,比如碰撞开关、红外接近开关、超声传感器、摄像头等,来感知自身的位置和状态,通过智能算法决定当前的任务状态。
它可以根据某个传感器检验地面清洁程度,根据历史信息确定哪些区域已经打扫过,它的充电座会发出红外线信息,在电量低于一定值后,它开始寻找红外信息来自动充电。
防跌落是基于机器人底部所安装的红外传感器检测地面的距离,当距离发生变化时机器人将停止并改变路线。
由于扫地机器人是一个智能化产品,1.3工作原理扫地机器人机身为可移动装置,机器人依托红外识别以及超声波测距从而避障,配合芯片控制内部电机转动以及内部真空环境吸尘,通过路线设计,在室内自由行走,由中央主刷旋转清扫,并且辅以边刷,沿直线或者之字形活动路径打扫。
2、设计要求与内容1)以AT89S52系列单片机为核心设计移动清扫机器人电机驱动与控制电路,采用红外传感器和超声波传感器完成障碍物检测电路设计,完成充电站检测电路设计,完成避障算法与路径规划算法设计。
2)按键选择清扫模式和充电模式。
3)显示方式LED显示当前时间和机器人当前工作状态。
自动智能扫地机器人设计
毕业设计(论文)任务书机电工程学院机械电子工程专业144班级学生:题目:自动扫地机器人设计毕业设计(论文)从2018年3月5日起到2018年6 月11日课题的意义及培养目标:设计(论文)所需收集的原始数据与资料:1、扫地机器人的构成2、扫地机器人的工作原理、工作过程3、各部分的实现方式4、清扫区域的设置5、模拟仿真的实现方法课题的主要任务(需附有技术指标分析):1. 在充分理解课题任务的基础上,设计自动扫地机器人的总体方案,画出扫地机器人的总体机械结构图。
2. 根据总体方案对各部分进行设计,画出各部分的结构图及零件图。
3. 根据功能要求设置检测控制系统,合理的选择元器件,画出控制原理图、接线图。
4. 用Keil编写避障及防跌落控制程序。
5. 用Proteus进行仿真调试,控制系统全部功能需要在软件上调试通过,软件可直观的方式表现出清扫机器人的工作过程。
6. 撰写1.5万~2万字毕业设计说明书。
设计(论文)进度安排及完成的相关任务(以教学周为单位):学生签名:指导教师:教研室主任:自动扫地机器人设计摘要随着科技和社会的不断进步和发展,机器人的应用从工业领域逐步扩展到了其他领域。
尤其是服务机器人,已经渗透了我们的生活、工作和经济各方面,并且起到了很大的作用。
扫地机器人是目前最贴近人类的机器人,它能够代替人完成家庭地面的清理,最有可能进入千家万户成为家庭生活的一部分。
它涉及到机械、电子和计算机等相关知识,是将移动机器人技术和清洁技术融为一体,自动扫地机器人技术的研究与实现旨在于,通过科技改变人们的口常生活。
它已经成为目前家用电器领域最具挑战性的热门研发课题。
本文主要介绍了自动扫地机器人的机械结构设计和控制系统设计,整体外形采用圆饼状,运动机构采用三轮机构,前轮万向轮后轮采用两个电机分别驱动,清扫机构采用蜗杆传动和带轮配合的传动方案,控制部分采用开关电路启动毛刷电机,采用L298电机驱动模块控制驱动电机,用红外传感器和光电传感器将信号传给AT89C51单片机完成了机器人的自动避障和防跌落功能,在相关机械结构的配合下能够有效地完成清扫工作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
前侧
未遇到障碍为 1,有障碍为 0
下侧
未遇到障碍为 1,有障碍为 0
/****************************************************************************** *************** 转弯程序 /****************************************************************************** **************/ void zhuanwan(void) { if((jiao%2)==0)X=X+(M1+M2)/2; if((jiao%2)==1)X=X-(M1+M2)/2; if((jiao%2)==1) //右转 { M1=0;M2=0; LED7=0; while(M1!=40) { MH1=1;ML1=0;
/****************************************************************************** *************** 障碍检测程序 /****************************************************************************** **************/ void scan(void) { TH0=0; TL0=0; TX0=1; delay15us(); TX0=0; while(!RX0); TR0=1; while(RX0);
**************/ void zhixing(void) { scan(); LED4=0; show(0); while(1) { if(jiao==10){LED4=1;zhixing1();} scan(); if(LED3){LED4=1;houtui();zhuanwan();LED4=0;} if(!LED2){LED4=1;zhuanwan();LED4=0;} if(M1==M2){MH1=1;ML1=0;MH2=1,ML2=0;} if(M1>M2){MH1=0;ML1=0;MH2=1,ML2=0;} if(M1<M2){MH1=1;ML1=0;MH2=0,ML2=0;} } } 返回程序: #include"common.h" /****************************************************************************** *************** 转弯程序 /****************************************************************************** **************/ void zhuanwan1(void) { if((jiao%2)==0)X=X+(M1+M2)/2; if((jiao%2)==1)X=X-(M1+M2)/2; if((jiao%2)==0) //右转 { M1=0;M2=0; LED7=0; while(M1!=40) { MH1=1;ML1=0; MH2=0,ML2=0; if(M1==40)break; } LED7=1; } if((jiao%2)==1) //左转 { M1=0;M2=0;
/****************************************************************************** *************** 外部中断 INT0 计算电机 1 的脉冲 /****************************************************************************** **************/ void interrupt0(void) interrupt 0 { M1++; } /****************************************************************************** *************** 外部中断 INT1 计算电机 2 的脉冲 /****************************************************************************** **************/
TR0=0; S=TH0*256+TL0; while(S>=1100){LED2=1;break;} while(S<1100){LED2=0;break;} // TH0=0; TL0=0; TX1=1; delay15us(); TX1=0; while(!RX1); TR0=1; while(RX1); TR0=0; Q=TH0*256+TL0; while(Q>=800){LED3=1;break;} while(Q<800){LED3=0;break;} // } 电机运行程序: #include"common.h" int X; //记录行走长度 int Y; //记录行走宽度 uint jiao; //转弯的次数
主程序: #include"common.h" void main() { INT_init(); jiao=0; while(1) { delay5s(); zhixing(); } } 时间程序: #include"common.h" int M1; //计左电机码盘脉冲值 int M2; //计右电机码盘脉冲值 /****************************************************************************** *************** 延时 15us /****************************************************************************** **************/ void delay15us(void) //误差 -0.894097222222us { unsigned char a; for(a=4;a>0;a--); } /****************************************************************************** *************** 延时 5s /****************************************************************************** **************/ void delay5s(void) //误差 -0.000000001033us { unsigned char a,b,c; for(c=155;c>0;c--) for(b=178;b>0;b--) for(a=82;a>0;a--); } /****************************************************************************** ***************
LED6=0; while(M2!=41) { MH1=0;ML1=0; MH2=1,ML2=0; if(M2==40)break; } LED6=1; } jiao--; Y=jiao*24; M1=0;M2=0; } /****************************************************************************** *************** 后退程序 /****************************************************************************** **************/ void houtui1(void) { if((jiao%2)==0)X=X+(M1+M2)/2; if((jiao%2)==1)X=X-(M1+M2)/2; M1=0;M2=0; //后退 LED7=0; while(1) { if(M1==M2){MH1=0;ML1=1;MH2=0,ML2=1;} if(M1>M2){MH1=0;ML1=0;MH2=0,ML2=1;} if(M1<M2){MH1=0;ML1=1;MH2=0,ML2=0;} if(M1==10&&M2==10){MH1=1;ML1=0;MH2=1,ML2=0;break;} } LED7=1; if((jiao%2)==0)X=X-(M1+M2)/2; if((jiao%2)==1)X=X+(M1+M2)/2; M1=0;M2=0; } /****************************************************************************** *************** 停车程序 /****************************************************************************** **************/ void stopcar(void)
初始化设置 /****************************************************************************** **************/ void INT_init (void) //定时器初始化 { EA = 1; //中断总开关 EX0 = 1; //允许外部中断 0 中断 IT0 = 1; //1:下沿触发 0:低电平触发 EX1 = 1; //允许外部中断 1 中断 IT1 = 1; //1:下沿触发 0:低电平触发 TMOD=0x01; //计时器设置 TX0=0; //端口初始化 RX0=0; TX1=0; RX1=0; M1=0; //码盘值初始化 M2=0; } /****************************************************************************** *************** 计时器 /****************************************************************************** **************/ void interrupt1(void) interrupt 1 { ; }