基于模糊控制器的改进耦合多电机同步控制
基于模糊PID控制的直流电机同步控制系统_王庆明
基于模糊PID 控制的直流电机同步控制系统*王庆明,孙怡(华东理工大学机械与动力工程学院,上海200237)摘要:为了更好地解决过程自动化领域多电机同步控制问题,以直流电机同步控制为研究对象,根据直流电机参数建立了控制系统数学模型,分析了采用传统PID 方式控制电机同步系统而存在的问题,将模糊控制与传统PID 控制相结合,设计出了模糊PID 控制器。
数值仿真及实验结果表明,该方案鲁棒性优良,响应快速,动态过程中同步误差小,能够较好地满足被控对象对高精度同步控制的要求。
所开发的模糊PID 控制软硬件系统在相应的实验平台上获得了较好的控制效果。
关键词:模糊控制;模糊PID 控制;直流电机同步控制中图分类号:TP273;TH39文献标志码:A文章编号:1001-4551(2012)05-0493-04Multi-DC motors'synchronization control system basedon fuzzy PID controlWANG Qing-ming ,SUN Yi(School of Mechanical and Power Engineering ,East China University of Science and Technology ,Shanghai 200237,China )Abstract :In order to solve the multi-DC motors'synchronization control in field of process automation ,with DC-motor synchronization control as the research object ,the mathematical model of the control system was established from the parameters of the DC-Motor ,the synchronization control system based on the traditional PID control method and its corresponding problems were analyzed.Then a fuzzy-PID controller was designed through the combination of fuzzy and PID control.Numerical simulation results show the good robustness ,fast response and negligible error in the system ,which can greatly suffice for the requirement of high precision of the system.And the developed experimental platform for this system is also verified with qualified results .Key words :fuzzy control ;fuzzy-PID control ;DC motors'synchronization control收稿日期:2011-12-26基金项目:国家自然科学基金资助项目(51175176)作者简介:王庆明(1954-),男,江西吉安人,博士,教授,博士生导师,主要从事现代设计制造工程方面的研究.E-mail :wangqm@0引言基于离心力的驱动方法,对于在某些特殊条件下的运动物体具有重要的意义。
基于环形耦合与模糊控制策略的多电机同步控制

Multi Motor Synchronous Control Based on Ring Coupling and Fuzzy Control Strategy
1368
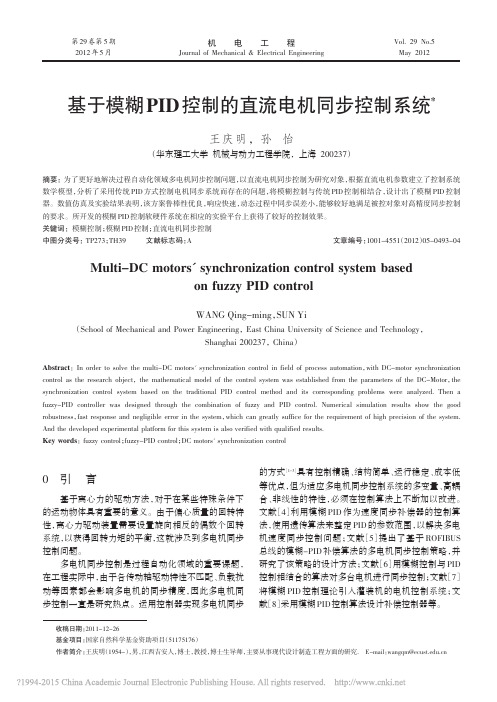
赵 坤等:基于环形耦合与模糊控制策略的多电机控制管理思维以及耦合补偿眼里的 结合得到了一种环形耦合控制方法。这种控制方 法根据标准转速以及系统内部电机之间转速的误 差获得,同时将临近电机的速度误差考虑在内。下 图所示为环形耦合控制系统结构图。
测速编码器
给定速度 信号
程,但是在一些高耦合以及非线性系统控制过程中 不具有比较理想的结果[1~2]。
在近代智能控制学逐渐发生的过程中同步控 制系统具有了足够的实践指导和理论参考,学者对 于智能控制算法的重视度逐渐的提升,通过副变增 益交叉耦合控制、模糊自适应控制以及智能变结构 控制等先进控制算法的应用来实现有效的控制和 跟踪[3~5]。
电机控制器
电机驱动器
测速编码器
给定速度 信号
电机控制器
电机驱动器
被控电机 被控电机
测速编码器
给定速度 信号
电机控制器
电机驱动器
被控电机
图 1 环形耦合控制系统结构
为了保证系统在终止以及开启状态时都具有 要求的功能,在运行控制系统的过程中应当事先环 形耦合,保证具有相同的电机信号。通过分析图 2 可以看出当电机与系统处于相邻的位置时才能够 同步进行误差的补偿。当电机出现异常的转速时 就会使得相邻电机的转速出现一定的偏差。在补 偿模块的影响下采用这种控制方法会将产生的误 差信息传递出去。一般情况下多电机同步驱动程 序会收到相同的信号,采用转速耦合进行模块补对 于系统一致性和稳定性的提升有非常好的效果,同 时外界的干扰所造成的影响也会逐渐地减小[6~7]。
基于模糊PI补偿的多电机协调控制系统

c o m
pe
t io n th r o
u
h p p ly in g t ho o t
a n
fu
z z
y
tr o
l
c o n c e
p t in
t s
m u
lt i
-
m o
to r
y
n c
hr o
a n
dr iv
ys te
m
It
e a rl
lv
e
h t
p r o b le
m
o
f
r e v o
lu t io
誊 多 ? 0 设 计 多萨 第 誊琴
。
尊
■
基 于模糊
PI
补 偿 的 多 电机 协 调 控制 系 统
沙德 亮
’
,
孔亚新
。
摘 要 : 将模糊 控 制 原 理 应 用 于 多 台直 流 电 动 机 同步 驱 动 系统 案
。
,
提出 了
一
种 参数 自调整 模 糊 P I 补 偿 的 同步 控 制 方
,
既 能解 决 转 速 超 调 问题
,
辽宁
大连
20 0 9 年 复 9 蜊 』 1 3 2 期j t
~
~
yz
$ e c f}Il ∞
m
一
lc 重技了
持 良好 的性 能 数 自调 整 模 糊
调
。
因此
PI
,
多 电机 同步 驱 动 系统加 入 参
,
得 到 很 大提 高 糊控 制 器 并 联
式
。
,
抗 扰 性 尤 其 得 到提 高
基于模糊控制的电机速度调节方法

基于模糊控制的电机速度调节方法电机是现代工业生产中不可或缺的关键设备之一,其速度的稳定调节对于生产制造过程具有重要意义。
在传统控制方法中,PID控制是一种常用的调节方法,然而,由于电机系统的非线性、参数变化等特点,PID控制往往难以实现较好的性能。
模糊控制方法因其较强的自适应性和鲁棒性,逐渐成为电机速度调节的有效手段之一。
本文将介绍基于模糊控制的电机速度调节方法,并分析其原理和实施步骤。
一、模糊控制原理模糊控制是一种基于模糊逻辑的控制方法,其特点是能够处理模糊不确定的系统。
在电机速度调节中,模糊控制通过建立模糊推理规则,将输入变量与模糊化的输出变量进行模糊逻辑运算,从而得到控制信号。
二、模糊控制的实施步骤1. 系统建模与输入输出定义首先需要建立电机系统的数学模型,并将输入(例如电机电流、扭矩)和输出(电机速度)进行定义和归一化处理。
2. 设计模糊化函数和模糊推理规则模糊化函数将输入和输出变量进行模糊化,将连续的输入输出域映射到模糊集合上。
模糊推理规则可以通过专家经验或者试验数据来确定。
3. 建立模糊控制规则库根据系统的特点和目标性能,建立一套完整的模糊控制规则库,包括输入变量、输出变量以及对应的模糊推理规则。
4. 运行模糊推理和解模糊通过输入变量的模糊化,通过模糊推理规则进行推理,生成模糊化的输出变量。
然后进行解模糊化,将模糊变量映射为具体的控制信号。
5. 系统辨识与参数调整模糊控制系统需要经过辨识和参数调整过程,以满足实际控制需求。
可以使用系统辨识方法进行模型参数的估计,并通过试验数据对模糊控制器进行参数调整。
6. 仿真与实验验证在控制器设计完成后,进行仿真和实验验证,评估控制器的性能。
根据控制系统的需求,对模糊控制器进行调整和优化。
三、模糊控制在电机速度调节中的应用模糊控制在电机速度调节中有着广泛的应用。
通过模糊控制的自适应性和鲁棒性,可以有效地应对电机系统参数变化、外界干扰等问题。
1. 静态误差补偿通过模糊控制的灵活性,可以有效地补偿系统的静态误差。
基于自整定模糊PID的多电机同步控制策略研究

基于自整定模糊PID的多电机同步控制策略研究本文主要针对多电机同步控制,采用先进技术设计了一种能够进行参数自整定模糊PID多电机同步控制策略。
在研究的过程当中,将传统的PID控制原理与模糊控制原理进行了有效的结合,并且积极运用了模糊推理判断思想,主要对自整定模糊PID控制器,在参数变化而形成不同偏差变化率、速递偏差的多电机实时变化中所产生的效果进行了分析研究。
最终通过仿真结果的分析发现,该种策略具有速度快、稳定性好、高同步精度、动态性好等诸多优势。
标签:自整定模糊PID;多电机同步控制;模糊控制0 前言在多电机同步控制当中能够应用到诸多先进的控制理论,其控制内容一般包括主从控制、同一输入控制、等状态耦合控制、交叉耦合控制等多个方面。
其中,交叉耦合控制能够使临近的两台电机进行交叉耦合,有助于简化偏差耦合控制。
另外,若运用可变增益的PID控制方法,将能够尽量解决系统响应当中的快速性和超调量之间的矛盾,具有重要积极意义。
为此,有必要在基于自整定模糊PID的情况下对多电机同步控制策略进行研究。
1 自整定模糊PID控制器设计本文在设计的过程中将传统PID控制与模糊控制进行了有效的结合,形成了自整定模糊PID控制器,基本如图1所示。
该系统结构当中的PID参数主要根据其初始值进行自整定而得出,其中KP、KI和KD分别为根据模糊理论所推理而得出的自调整量,其初始值分别为KP0、KI0和KD0。
若将误差设置为e,将误差变化率设置为è,则通过整个系统当中的PID参数不自调整量与量化因子相乘,结合模糊化体现模糊变量,将能够得出负大、负中、负小、零、正小、正中、正大几种结果[1]。
再结合模糊论域以及隶属度函数、三角函数,将能够得出49条模糊规则。
将通过模糊理论得出的模糊结果,利用反模糊化重心法进行模糊的解释,并且将KP、KI和KD的精确值进行转化后,将能够得到相应的PID控制器实时参数[2]。
2 改进型环形交叉耦合控制结构对改进型环形交叉耦合控制结构进行分析时发现,若多电机系统当中存在的诸多电机之间转速能够形成一定的比例,与此同时,通过其形成的转速比例与同步系数进行相比,将能够得到相应的相邻两个电机之间所产生的同步转速误差。
糊矢量控制的多电机同步控制系统的设计方案

糊矢量控制的多电机同步控制系统的设计方案1 引言随着近年来传动系统的发展,多电机传动系统已经被广泛地应用于各种领域。
为了提高多电机传动系统的动态性能和稳态性能,满足一些特定系统对多电机控制的同步要求,多电机协调同步控制方法的研究变得越来越重要。
针对交流电机的数学模型是一个高阶、非线性、强耦合的多变量系统,以及矢量控制的不完全解耦性等缺点,本文引入了智能控制中的模糊控制技术,选用参数自调整模糊控制器,设计了一种基于模糊矢量控制的多电机同步控制方案从而提高系统的动态性能。
方案中使用西门子变频器的矢量控制功能对交流电机进行变频调速,在西门子PLC 中实现了参数自调整的模糊控制。
并通过Matlab 进行系统设计的仿真验证和分析。
2 多电机同步控制系统概述在现代应用系统的设计开发过程中,充分利用计算机仿真、实验技术,对于系统设计开发过程中合理选择系统结构、优化系统参数、检验控制方法,提高系统设计与开发效率有着极其重要的作用。
本文依据已提出的矢量变频调速与合成误差补偿主从串联控制方案构建了主从轴协调控制实验系统,为实际应用系统的设计积累经验与资料,硬件结构图如图1 所示。
由于可编程控制器(PLC)具有硬件简单、编程方便、抗干扰性强等有点,现已广泛的应用与交流电机控制系统中,本章介绍的矢量控制是以PLC 作为控制核心的控制系统。
多电机同步控制系统的正常运行对电气传动控制系统的要求基本有以下几点:(1) 传动系统要有一定的稳定精度和快速动态响应。
其中稳态精度±0.01~0.02%,动态精度±0.05~0.5%,同步动态精度为±0.05~0.45%;。
模糊自调节的偏差耦合多电机同步控制

KEY WORDS: Speed synchronous control, Fuzzy-self-adjusting filter model,
Softening speed, Advanced correction, Deviation coupling control
IV
目录
摘 要.................................................................................................................... I ABSTRACT ........................................................................................................III 目 录...................................................................................................................V 第 1 章 绪论..........................................................................................................1
基于模糊PID的多电机全闭环同步控制系统
基于模糊PID的多电机全闭环同步控制系统摘要:在实际工程应用时PID 控制策略以及传统的耦合控制策略都很难满足高同步性能的要求,并容易造成速度跟踪失步的问题。
文章基于模糊PID控制策略的基础上采用多不同电机全闭环控制方法对传统耦合控制方式进行改进,并以模糊PID控制器为核心,应用Simulink进行建模仿真,结果表明改进后的多电机全闭环同步控制系统具有良好的同步性、稳定性和准确性。
关键词:交叉耦合控制;模糊PID控制器;多电机传统的PID控制策略在单电机控制时能够发挥很好的作用,但是对于多电机的同步控制,其无法判断其他电机的速度水平。
传统的耦合控制采用主从电机控制,主电机的速度不会跟随从电机速度的变化而发生变化,因而造成了主从两台电机间的失步。
在理论上相邻耦合算法的控制策略能够得到理想的同步控制性能,实际上由于负载动特性的参数很难实时测量,使得此策略在应用上受到了限制,并且由于控制算法非常繁琐,这种控制策略难以实现多台电动机的同步控制。
所以本文提出了一种基于模糊PID控制器的改进耦合控制方法来控制多台不同型号的永磁电机,实现同步控制的效果。
1 模糊PID控制器多电机全闭环控制系统目前对于多电机的控制方式多采用半闭环的控制方式,对于电机后端的机械传递系统的误差不加以控制,误差不能得到很好地控制。
本文采用模糊PID控制器的多电机全闭环控制系统可以有效的避免这种误差。
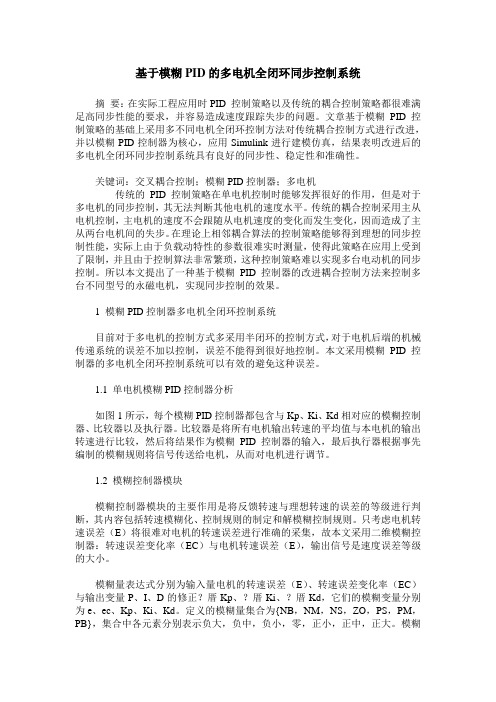
1.1 单电机模糊PID控制器分析如图1所示,每个模糊PID控制器都包含与Kp、Ki、Kd相对应的模糊控制器、比较器以及执行器。
比较器是将所有电机输出转速的平均值与本电机的输出转速进行比较,然后将结果作为模糊PID控制器的输入,最后执行器根据事先编制的模糊规则将信号传送给电机,从而对电机进行调节。
1.2 模糊控制器模块模糊控制器模块的主要作用是将反馈转速与理想转速的误差的等级进行判断,其内容包括转速模糊化、控制规则的制定和解模糊控制规则。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
需要,这种需求为多台电机的同步控制提供了发展的空间。目前对多路电机的同 步 控 制 主 要 有 非 耦 合 和 耦 合 控 制 两 种。在传统耦合控制中当从电机负载突变时,因主电机没有对从电机运行 状态 的 跟 踪, 因 而 造 成 了 主从 两 台 电机 间 的失步。基于模糊控制器对多电机传统耦合控制方式进行改进。并以模糊 控 制 器 为 核 心,应 用 Matlab / Simulink 进 行 建模仿真,结果表明改进后的多电机同步控制系统具有良好的同步性和稳定性。 关键词: 同步控制; 耦合控制; 模糊控制器; 多电机; Matlab / Simulink 中图分类号: TP273 文献标志码: A 文章编号: 1001-6848 ( 2011 ) 03-0075-03 ) 的 转速 保 持同 步, 需 要 保
。
图1
改进耦合多电机同步控制结构框图
2
基于模糊控制器的判断和执行模块
模块中有 与电机 数 量 对应的模 糊 控 制 器、 一个
根据对多路 电机 运 行 的 预 定要求 和 经 验 总 结制 定出模糊控制规则表,见表 1 。
NB N6 N5 N4 N3 N2 N1 ZO
NM N5 N4 N3 N2 N1 ZO P1
NS N4 N3 N2 N1 ZO P1 P2
ZO N3 N2 N1 ZO P1 P2 P3
PS N2 N1 ZO P1 P2 P3 P4
化时,其它三台都具有较好的跟随性能。
解模糊是 模 糊 化 的 相 反 过 程, 它是 从 模 糊 推 理 的结果中产生 我 们 需 要的 控 制 数 值
[5 ]
0
引
言
。传统耦合控制
思想是以主电机的输出 量 作为 从 电机的输 入 量, 使 从电机精确地 跟 踪 主 电机。 在 传 统 的 耦 合 控 制 中 从 电机能够在主 电机的 负 载 突 变 或 速度 跳 变 时 保 持对 主电机的同 步, 但从 电机的 运 行 状态 改 变 时, 主 电 机因为没有对 从 电机 运 行 状态 的 跟 踪, 因 而 造 成 了 主从两台电机 间 的 失 步。 交 叉 耦 合 法虽然 能 够 有 很 好的同步控制性能, 但 是这种控 制 策 略 不 适合 两 台 以上电动机的同 步 控 制 情况。 为 此, 本文 提出 一种 基于模糊控制器的改进耦合控制方法。
The Improved Coupling Multimotor Synchronous Control Based on Fuzzy Controller
CUI Jiefan1 ,XING Feng1 ,ZHAO Nan1 ,WU Qiong2 ( 1. Shenyang University of Technology,Shenyang 110870 ,China; 2. Jinzhou Northern Electrcity Installation Co. LTD,Jinzhou Liaoning 121000 ,China) Abstract: With the improvement of industrial automation and gradually increasing in requirements with quality of product,in some occasions single motor driven can not meet with the needs of modern development any more,which provide multimachine synchronous control with room for development. Currently multimotor synchronous control were mainly divided into noncoupling and coupling control. In traditional coupling control ,falling out of step will be caused between the two motors when load mutation happens due to the lack of main motor’ s running status tracking on the submotor. Coupling control method was improved by detecting each motor speed error in multimachine control system ,then Matlab / Simulink was adapted in modeling and simulation with the core of fuzzy controller and the results indicate good synchronization and stability with the improvement of multimotor synchronous control system. Key words: synchronous control; coupling control; fuzzy controller; multimotor; Matlab / Simulink 非耦合控制 算 法 和 耦 合 控 制 算 法
· 76 ·
44 卷
1
改进耦合的同步控制思想
对于有 n 台 电机 ( 转 轴 ) 的 控 制 系统, 定 义 第 i
比较器和一个 执 行 器。 模 糊 控 制 器 的 作用是 判 断 与 它对应电机的 转速误 差 等级 的大 小。 比 较 器 是 将全 部模糊控制器 的输出 先 取 绝 对 值 然后 进 行 比 较, 最 后将结果送给 执 行 器, 执 行 器 按照 事 先 制定的 逻辑 规则将反馈信 号 送 给 对应的电机, 从 而 实 现 新 的 耦 合顺序。 2. 1 基于模糊控制器的判断模块设计 这个模块的 主 要 功 能 是 判 断 出输 入 该 模 糊 控 制 器的电机转速 的 误 差 等级 大 小。 它 主 要 包括 输 入 量 ( 2) 的模糊化、模 糊 推 理机 和 解 模 糊。 考虑 到 如果 只 考 虑电机的转速误 差 而 不 考虑 转速误 差的变 化 率 将很 难对转速误 差 进 行 科 学的 判 断, 所 以本文采 用 二维 模糊控制器。模 块 的输 入 是 电机的 转速误 差 和转速 误差的变化率,输出是速度误差的等级。 , 将控制器输入 变 量 的模 糊 论 域 设 定 为[ - 3 3 ] 模糊变量划分为 6 个模糊子集,语言值均取为{ NB , ( 4) NM ,NS ,ZO ,PS ,PM ,PB } ,隶属度函 数 选 用 三角 形, 如 图 2 所 示。 控 制 器 输 出 变 量 的 论 域 为 [- 6 6 ] ,语 言 取 为 { N6 ,N5 ,N4 ,N3 ,N2 , N1 , ZO ,P1 ,P2 , P3 , P4 , P5 ,P6 } , 隶 属 度 函 数 也 选用三角形,如图 3 所示。 模糊推理机 是 模 糊 控 制 器 的 核 心。 模 糊 推 理机 的主要功能是 模 仿 人 的 思 维 特 征。 它是 根据 事 先 制 定好的依据专家 知 识 或 控 制 经 验 取 得 的 若 干 组 模 糊 条件语句构成 的模 糊 控 制 规 则, 运用 模 糊 数 学理 论 进行推理
多电机同步 控 制 一 直 是运 动 控 制研究 领域 的 重 要课题之一,广泛应 用 于 拉 拔、纺织、印 染、造 纸、 轧钢等制造与 生产 过 程自 动 化 控 制 系统中。 多 电机 同步控制技术 在工 业领域 的应 用, 是 自 动 化 生产 的 一种发展 趋 势
[1- 3 ]
。 实际应 用中, 多 电机的同 步 性
第 44 卷 2011 年
第3 期 3月
M ICROM OTORS
Vol. 44. No. 3 Mar. 2011
基 于 模 糊 控制器 的 改进耦 合 多 电机 同步 控制
1 崔皆凡 ,邢 1 丰 ,赵 1 楠 ,吴
琼
2
( 1. 沈阳工业大学,沈阳 110870 ; 2. 锦州北方电力安装工程有限责任公司,锦州 121000 ) 摘 要: 随着工业自动化程度和对产品质量要求的逐渐提高,单台电机驱动在 某 些 场 合 已 经 不能满足 现 代 化 发展 的
3期
崔皆凡等: 基于模糊控制器的改进耦合多电机同步控制
· 77 ·
表1 ec NB NM NS ZO PS PM PB
模糊控制规则表 e
还是在给定指 令 变 化 的 调 速 过 程 中 都 具有 较 快 的动 态响应速度。当 某台 电机 负 载 出 现 扰 动 导 致 速度 变
PM N1 ZO P1 P2 P3 P4 P5 PB ZO P1 P2 P3 P4 P5 P6 图4 4 台电机起动、负载跳变和调速时的转速仿真曲线
速给定值; Δn i 为第 i 轴的转速误 差。 对于 整 个 n 台
当转速给定相同时( 同步比例系数为 1 ) : 则有 n =n =…=n 持每台电机的转速误差相等,即 Δn1 = Δn2 = … = Δn n 当某一台 电机 负 载 端 受 到扰 动 时, 会 使 这 台 电 机的转速误 差 增 大, 从 而 失 去 与 系统中 其 它 电机的 同步运行状态。例如第 i 台电机受到扰动时,则有 n i = max( n1 ,n2 ,…,n n ) (5 ) 那么我们就 将 扰 动最大的第 i 台 电机 作为 主 电 机,其它电机 为 同 级 从 电机。 改 进 的 耦 合 控 制 算 法 的系统结构,如图 1 所示。 改进耦合 的 多 电机 控 制 系统 由 电机、 电机 控 制 器和基于模 糊 控 制 器 的 判 断 和 执 行 模 块 组 成。 每 台 电机和电机控 制 器 组 成一个 完整 的 单 台 电机 控 制 系 统。每个单台电机 控 制 系统 通过 判 断 和 执 行 机构 来 实现耦合,根据 运 行 状况 的不同 改 变 耦 合 的 连接 次 序,即更改耦合的接线形式。