汽车前轮转向机构
前桥转向结构及原理
g、方向摇晃或跑偏
方向跑偏的故障首先应检查机械部分和外界因素。 汽车行驶在拱形路面 的一侧上本身就有偏跑的倾向,当拱形较大时跑偏就较为明显是外界的因素 造成的。 前轮两边轮胎气压不同、一边是新轮胎另一边是旧轮胎或左右胎磨损差 异较大、前钢板错位(例如钢板中心螺栓)、前轮定位偏差较大等都会造成方 向跑偏。如果排除上述机械和外部因素,方向仍然严重跑偏,那就可能是转 向机内控制转向螺母偏摆杆初始位臵调整不当,使汽车直线行驶时,转向螺 母在偏臵位臵,偏臵的滑阀总使活塞某一侧产生高压助力,造成汽车自动跑 偏。 如果汽车行驶时无规律地两边摇晃,方向不好掌握,说明转向系统机械传 动各机构较松旷。例如前轮轮鼓轴承松旷、转向轴扇齿与活塞直齿间隙过大、 横直拉杆球头松旷、转向机固定螺丝松旷、前轮定位有较大的偏差等等。前 轮钢圈变形当然也会引起方向的抖动,如果排除上述的机械原因,则很可能 是转向机内定位转向螺母的偏摆杆折断或松旷所致。
b、单边转向沉重
在实际中往往发生向一个方向转向轻快,而向另一个 方向转向沉重的故障,这一般是由于负责密封一侧高压 腔的密封件漏损所至。倒如转向螺杆密封圈、活塞圆周 上油道密封圈等。 还有一种情况应当注意,那就是转向沉重,一侧的限 位阀封闭不严。封闭不严可能是调整不当,使该限位阀 大部分在常开位臵,或是阀与阀座封闭不严,更多的情 况是限位阀上两个“0”型密封圈失效所致。 有的时候会发生向某一方面转向时从头至尾都很轻, 而向另外一个方面打方向时,开始很轻,每打到某一个 位臵,方向就突然沉重。这种故障一般来讲是由于该方 向的限位阀调整不当,使车轮还没有到极限位臵时,限 位阀就打开卸荷,此后方向立刻沉重。遇有此故障只要 按上节所述进行限位阀的重新调整就行了。
转向系统常见故障以及排除
一般来讲引起方向重的原因有如下几种: 1)助力泵故障 通过试验判断助力泵的泵压达不到标准值时,显然方向 沉重与此有关。首先应检查流量控制阀与阀座的啮合面、安 全阀钢球是否封闭不严。如果是流量阀或安全阀泄漏,可通 过研磨的方法修复。其次再检查安全阀的弹簧是否失效。这 点可通过在弹簧后面加垫片的方法检查,如果在弹簧后面增 加一垫片后,最大泵压有明显增加,说明弹簧失效。如果这 两个部位都无问题,则应拆卸解体助力泵,观察叶片泵的腔 壁是否磨损和拉伤。因腔壁拉伤会使高、低压腔相通,从而 造成压力建立不起来。一般拉伤的原因都是油脏所至。如果 方向突然沉重,则应检查是否是泵轴断
课程案例_11双摇杆机构应用—汽车前轮转向系(精)
职业教育机电一体化专业教学资源库
双摇杆机构应用—汽车前轮转向系
1.课程案例基本信息
2.课程案例
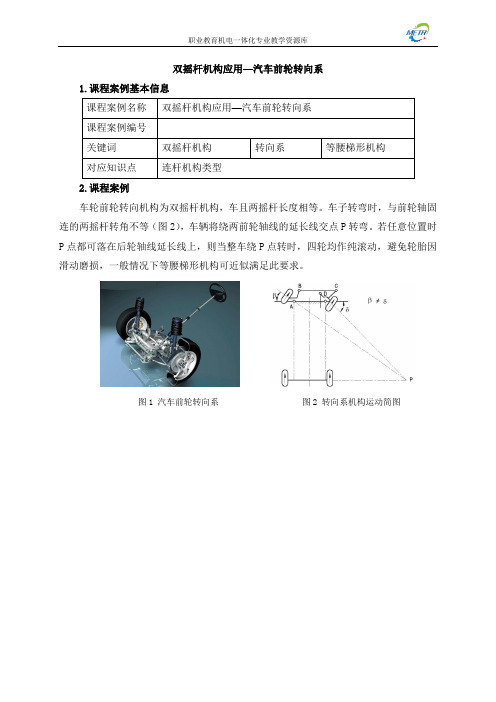
车轮前轮转向机构为双摇杆机构,车且两摇杆长度相等。
车子转弯时,与前轮轴固连的两摇杆转角不等(图2),车辆将绕两前轮轴线的延长线交点P 转弯。
若任意位置时P 点都可落在后轮轴线延长线上,则当整车绕P 点转时,四轮均作纯滚动,避免轮胎因滑动磨损,一般情况下等腰梯形机构可近似满足此要求。
图1 汽车前轮转向系 图2 转向系机构运动简图。
汽车转向器的组成

汽车转向器的组成
汽车转向器的组成
汽车转向器是汽车最重要的驱动部件之一,用来控制车辆的转向方向,为安全驾驶起到重要作用。
一、汽车转向器的组成
1、转向臂:转向臂是转向器的中心部分,它连接车轮、转向踏板和转向拉杆,以改变前轮的行驶方向。
2、转向拉杆:转向拉杆由多个拉杆组成,它们负责将车辆的转向指令从转向踏板传送到转向臂上。
3、转向踏板:转向踏板由踏板弹簧、踏板拉簧、踏板抱杆和踏板机构组成,其作用是将司机的转向指令传递到车辆的转向拉杆上。
4、转向器动力:转向器的动力是由动力传动机构提供的,它主要由齿轮、轮毂、真空助力器等组成,由电子控制系统调节它们提供的力度,以改变前轮的行驶方向。
二、转向器的作用
转向器的作用是使车辆能够控制前轮的行驶方向,以便行驶在弯道、路口等路段时,车辆能够更加自如的换道、转弯。
此外,转向器还能改善车辆的操控性能,让司机能够更顺利、灵活地操控车辆。
- 1 -。
汽车前轮转向原理
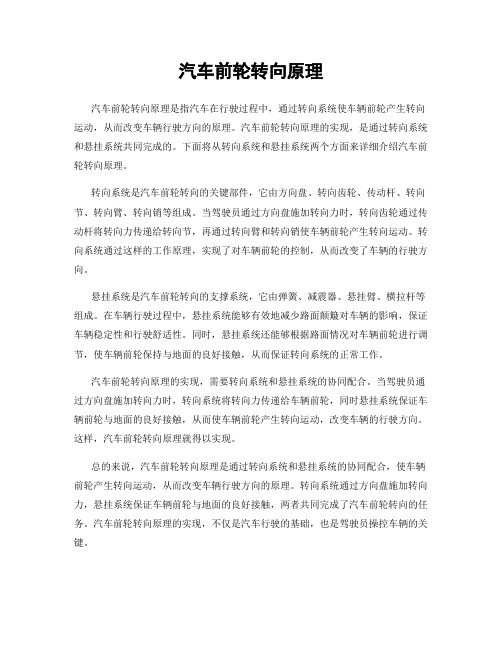
汽车前轮转向原理
汽车前轮转向原理是指汽车在行驶过程中,通过转向系统使车辆前轮产生转向运动,从而改变车辆行驶方向的原理。
汽车前轮转向原理的实现,是通过转向系统和悬挂系统共同完成的。
下面将从转向系统和悬挂系统两个方面来详细介绍汽车前轮转向原理。
转向系统是汽车前轮转向的关键部件,它由方向盘、转向齿轮、传动杆、转向节、转向臂、转向销等组成。
当驾驶员通过方向盘施加转向力时,转向齿轮通过传动杆将转向力传递给转向节,再通过转向臂和转向销使车辆前轮产生转向运动。
转向系统通过这样的工作原理,实现了对车辆前轮的控制,从而改变了车辆的行驶方向。
悬挂系统是汽车前轮转向的支撑系统,它由弹簧、减震器、悬挂臂、横拉杆等组成。
在车辆行驶过程中,悬挂系统能够有效地减少路面颠簸对车辆的影响,保证车辆稳定性和行驶舒适性。
同时,悬挂系统还能够根据路面情况对车辆前轮进行调节,使车辆前轮保持与地面的良好接触,从而保证转向系统的正常工作。
汽车前轮转向原理的实现,需要转向系统和悬挂系统的协同配合。
当驾驶员通过方向盘施加转向力时,转向系统将转向力传递给车辆前轮,同时悬挂系统保证车辆前轮与地面的良好接触,从而使车辆前轮产生转向运动,改变车辆的行驶方向。
这样,汽车前轮转向原理就得以实现。
总的来说,汽车前轮转向原理是通过转向系统和悬挂系统的协同配合,使车辆前轮产生转向运动,从而改变车辆行驶方向的原理。
转向系统通过方向盘施加转向力,悬挂系统保证车辆前轮与地面的良好接触,两者共同完成了汽车前轮转向的任务。
汽车前轮转向原理的实现,不仅是汽车行驶的基础,也是驾驶员操控车辆的关键。
(汽车行业)汽车转向梯形机构设计

(汽车行业)汽车转向梯形机构设计汽车转向梯形机构是汽车行业中非常重要的部件之一。
它将驾驶员的转向操作转换成前轮方向的运动,使车辆能够按照驾驶员的意愿进行转向。
因此,汽车转向梯形机构的设计非常重要,不仅需要考虑其机械结构的合理性,还需要考虑其动态特性和安全性能。
汽车转向梯形机构的设计要解决的一个重要问题是机构的传动比和传动精度问题。
传动比指的是驾驶员转动方向盘所能使车辆前轮转向的程度,而传动精度则是指机构传动过程中的误差大小。
通常情况下,传动比需要保证较大的转角与较小的转动力之间的关系,以提供足够的转向力,并使驾驶员的操作更为轻松顺畅。
传动精度则需要尽可能小,以确保转向的准确性和稳定性。
汽车转向梯形机构的设计需要考虑多个部件的合理组合和配置。
其中最主要的部件包括转向节、拉杆、摇臂、拉杆座等。
转向节是转向梯形机构的核心部件,它连接前轮和拉杆,并将前轮转向运动传递到拉杆上。
拉杆是连接前轮和转向节的杆状部件,摇臂则是连接转向节和转向柱的中间件。
拉杆座则是固定拉杆和转向柱的底座。
在设计汽车转向梯形机构时,还需要考虑到动态特性和安全性能。
动态特性主要指机构的响应速度、稳定性以及阻尼。
为了保证机构的响应速度和稳定性,一般需要提高机构的阻尼系数。
同时,还需要考虑防震和抗干扰能力,以确保机构在恶劣路况和异常干扰情况下能够正常运行。
安全性能则是汽车转向梯形机构最重要的考虑因素之一。
机构在运行过程中需要抵御较大的转向力和扭矩。
此外,在车辆发生碰撞时,转向梯形机构也需要能够提供足够的承载能力,以避免驾驶员和车辆受到过大的损伤。
在实际应用中,汽车转向梯形机构的设计需要满足多种使用条件和环境要求。
例如,机构必须在各种温度、湿度和油渍等环境下都能够正常工作,同时还要满足标准化和规范化的要求,以确保产品的质量和可靠性。
总之,汽车转向梯形机构的设计是汽车工程中至关重要的部分。
要实现合理的设计,需要考虑多种因素和要求,包括传动比、传动精度、机构的动态特性、安全性能、使用条件和环境要求等。
简述汽车转向系统工作原理

简述汽车转向系统工作原理汽车转向系统的工作原理是通过控制前轮的转向角度来改变车辆的方向。
一般来说,汽车转向系统包括转向盘、转向机构、转向齿轮和传动装置。
当驾驶员旋转转向盘时,转向机构将转向盘的转动传递给前轮。
转向机构通常由传动杠杆、万向节和连杆组成,它们的作用是转换驾驶员施加在转向盘上的力到前轮上,并改变它们的转向角度。
转向齿轮是转向系统中的关键部件,它将驾驶员施加在方向盘上的转矩转换为前轮的转动角度。
转向齿轮通常是螺旋齿轮,可以将驾驶员施加的小转角转化为前轮的较大转角。
传动装置将转向盘的转矩传递到转向齿轮上,以便转动前轮。
传动装置包括转向拉杆、连杆和齿条。
转向拉杆将转向齿轮的转动传递给前轮,同时保持两个前轮以相同的转角转动。
总之,汽车转向系统通过将驾驶员施加在转向盘上的力转换为转向齿轮的转动,再通过传动装置将转动传递给前轮,从而改变车辆的方向。
这样就实现了驾驶员控制车辆行驶方向的目的。
除了传统的机械转向系统,现代汽车还采用了一些辅助转向系统,如电动助力转向系统(EPAS)和液压助力转向系统(HPAS)。
电动助力转向系统(EPAS)利用电动机提供转向助力,通过传感器检测驾驶员的转向力度和车辆的行驶状态,以实现对转向力的主动控制。
当驾驶员施加力矩时,电动助力转向系统可以放大这个力矩,减少驾驶员所需的力量,从而使转向更轻松。
液压助力转向系统(HPAS)是通过液压泵、液压缸和液压油来提供转向助力。
当驾驶员施加力矩时,液压泵会增加液压油的压力,通过液压管路将助力传递给转向机构,从而减少驾驶员的力量。
与EPAS相比,HPAS在提供助力时可能会稍微滞后,并且液压系统需要定期维护和更换油液。
另外,还有一些高级的转向系统,如主动转向系统和四轮转向系统。
主动转向系统可以根据车速和行驶状况自动调整前轮的转向角度,以提供更好的操控性和稳定性。
四轮转向系统可以通过控制后轮的转向角度与前轮相反或相同,来改善低速操纵和高速稳定性。
轿车前轮主动转向系统机械结构设计
摘要轿车前轮主动转向系统可以确保车辆在任何速度下都能提供理想的转向操控,同时加强了轿车在高速行驶状态下的安全性,提高了驾驶员在驾驶汽车时候的灵活性和舒适性,而且相比于传统的转向器,主动转向系统更加可靠,故障率更低。
本设计以现有主动转向系统装置为基础,参考先进的主动转向系统的设计原理和已有汽车的相关数据,重新设计齿轮齿条式转向器及相匹配的主动转向系统机械部分的结构方案,并对相关的部分进行强度校核。
设计的主要内容包括:转向系统主要参数的确定,齿轮齿条转向器的设计,主动转向控制器的设计,其中主动转向是设计中的难点,采用星星齿轮机构来实现主动转向的控制,最后运用Auto CAD软件进行二维图纸的绘制。
关键词:转向器;主动转向;前轮;机械设计;行星齿轮ABSTRACTActive steering system can ensure vehicles in any speed can provide the ideal steering control, while strengthening the cars in the safety of high-speed condition, improved driver when driving a car the flexibility and comfort, and compared with conventional methods, active steering system more reliable, failure to even lower.This design is based on the front-wheel existing active steering system, reference information of advanced active steering system and related data of some cars, redesign the theory of steering system with gear and rack and matching active steering system structure scheme of mechanical part.Design of the main content includes: the main steering system of parameters, the design of steering gear rack, active steering the controller design, including active steering is the difficulty in the design, use the stars to implement active steering gear control, finally I use Auto CAD software for the 2D drawingsKey words: redirector; active steering; front wheel; mechanical design; planetary gear目录摘要 (I)Abstract (II)第1章绪论 (1)1.1 转向系统综述 (1)1.2 主动转向系统特点 (2)1.3 本章小结 (3)第2章转向系统主要参数的确定 (4)2.1转向盘的直径 (4)2.2转向盘回转的总圈数 (4)2.3转向系的效率 (4)2.4转向系的传动比 (5)2.4.1转向时加在转向盘上的力 (6)2.4.2小齿轮最大转矩计算 (6)2.4.3转向系的角传动比 (6)2.4.4转向器的角传动比 (7)2.5 本章小结 (7)第3章齿轮齿条式转向器的设计 (8)3.1齿轮齿条结构参数设计 (8)3.2齿轮齿条设计及校核 (8)3.3 本章小结 (13)第4章主动转向控制器的设计 (14)4.1主动转向控制器几何结构设计 (14)4.2主动转向控制器行星齿轮设计 (15)4.3主动转向控制器行星齿轮可行性设计 (21)4.4主动转向控制器蜗轮蜗杆设计 (23)4.4.1蜗轮蜗杆传动比的确定 (23)4.4.2蜗轮蜗杆的设计 (25)4.5本章小结 (29)结论 (30)参考文献 (31)致谢 (32)附录A (33)附录B (35)第1章绪论主动转向系统保留了传统转向系统中的机械构件,包括转向盘、转向柱、齿轮齿条转向机以及转向横拉杆等。
机械原理课程设计-----汽车前轮转向机构
最优方案设计
3.传动连接杆
传动连接杆为直角构件,连接传动主杆和这轮系统,将主杆动力传输至车轮转向系统同时约束车轮转动的方向和角度
最优方案设计
4.车轮系统
车轮系统由车轮和转向连杆两部分组成,转轴固定于底板之上,同时与传动连接杆相组合,通过配合连接杆的运动实现两侧车轮系统绕底板固定轴平行转动,保证了转向的精确
方案三:基本结构是一对相互啮合的小齿轮和齿条。 转向轴带动小齿轮旋转时齿条便做直线运动。齿条作为传动主杆,其两端与传动连接杆组合将动力传输给车轮转向系统,并通过连接杆件间的配合协作来控制车轮转向的方向和不同的角度。
方案四:通过转动方向盘,带动方向盘直连的杆件转动,通过直连的末端电控单元检测转动角度和车速等数据,通过蜗轮蜗杆辅助转向。再通过两段万向节的杆件机构传动到底盘上的蜗轮蜗杆,带动四杆机构(双摇杆机构)使车辆转向
感谢观看
延时符
四、最优设计方案
最优方案设计
三维建模
最优方案设计
1.动力齿轮
动力齿轮按照方向盘的不同转动方向而转动,同时与动力主杆上的齿键相咬合推动主杆平行移动
最优方案设计
2.传动主杆
传动主杆为带有齿的平直杆件,通过与齿轮的咬合接收传动齿轮传输的动力平行移动,并根据齿轮转动方向不同改变移动方向,两端与传动连接杆组合,将动力传输至后续结构
三、设计方案展示
方案一:利用螺纹咬合的传动原理,将方向盘的旋转传动为杆件的横向移动,从而带动转向梯形结构转动,使得两侧车轮得以向相同角度,相同方向转动带动车体转向
方案二:汽车前轮转向机构运用平面四杆机构,该转向机构为等腰梯形双摇杆机构,铰链四杆机构左右对称,保证左右轮转弯时有相同特性,通过摇杆的转动带动车轮的等角度转动。
汽车转向系的工作原理及故障分析
汽车转向系的工作原理及故障分析汽车转向系统是汽车安全性能中十分重要的一部分,它直接影响到汽车的操控性能和行车安全。
了解汽车转向系统的工作原理和常见的故障分析对于驾驶人员来说非常重要。
本文将详细介绍汽车转向系统的工作原理,以及常见的故障分析。
一、汽车转向系统的工作原理汽车转向系统主要由转向机构、转向机和转向操纵装置组成。
在行驶过程中,当驾驶者操作方向盘时,转向机构和转向机会协同作用,使汽车前轮朝向所需的方向转动,从而改变汽车的行驶方向。
1.转向机构转向机构主要由转向齿轮、传动杆、齿条、滚珠丝杆等组成。
当驾驶者转动方向盘时,通过转向机构产生的一系列动作传递到转向机上,使转向机产生相应的工作力来改变车轮的方向。
转向机主要由电动助力转向机、液压助力转向机和非助力转向机三种类型。
助力转向机通过电动机或液压系统的力来辅助转向机构的工作,减少了驾驶者操纵转向的力量,并提高了操控性能。
3.转向操纵装置转向操纵装置主要由方向盘、转向总成、联杆、转向销等组成。
驾驶者通过操纵方向盘来控制转向操纵装置的工作,从而实现对汽车行驶方向的控制。
二、汽车转向系统的常见故障及分析1.方向盘打滑方向盘打滑是常见的转向系统故障,可能是由于转向机构内部有异物或油脂积聚,或者转向齿条、传动杆出现磨损。
这时需要将转向机构进行检修和清洗,更换磨损的零部件。
2.方向盘转动不灵活3.方向盘异响方向盘在转向时发出异响,可能是由于转向机构齿轮出现损伤,转向助力系统液压泵或电动助力系统出现问题等。
需要检查并更换损坏的部件。
4.转向不准转向不准可能是由于车轮定位不准确,转向总成出现磨损,也可能是由于转向机构和转向助力系统出现故障等。
此时需要对车轮进行定位调整,更换磨损的零部件。
5.转向失灵转向失灵是非常严重的转向系统故障,可能是由于转向助力系统泵失灵,液压管路破裂,转向机构内部损坏等。
需要立即停车检查并维修。
汽车转向系统是汽车行驶过程中十分重要的一部分,它的工作原理和故障分析对驾驶人员来说十分重要。
汽车六大操纵机构的功用与操作办法
汽车六大操纵机构的功用与操作办法汽车的六大操纵机构分别是驾驶系统、制动系统、悬挂系统、传动系统、转向系统和照明信号系统。
以下将分别介绍其功用及操作办法。
一、驾驶系统(操纵杆、操纵轮等)驾驶系统是汽车操纵的核心,驾驶员通过操纵杆、操纵轮等来控制汽车前进、停止、变速和转向等动作。
操作办法如下:1.操纵轮:通过左右转动操纵轮控制汽车的转向。
左转操纵轮向左转动,右转操纵轮则向右转动。
2.仪表盘:驾驶员可以通过监控仪表盘上的速度表、转速表、水温表等来掌握汽车的运行状况,及时调整驾驶操作。
3.油门踏板:通过控制右脚踩油门踏板的深浅来调节汽车的速度。
4.刹车踏板:通过控制右脚踩刹车踏板的力度来减速或停车。
二、制动系统制动系统用于控制汽车的制动,具有保证行车安全的重要作用。
操作办法如下:1.制动踏板:通过右脚踩下制动踏板来使制动器发动,实现减速或停车的效果。
2.驻车制动:驻车制动一般位于驾驶员座椅旁边,操纵驻车制动手柄可固定住汽车。
上拉手柄为打开制动,下压手柄为解除制动。
三、悬挂系统悬挂系统负责汽车与路面的接触,稳定车身,并吸收道路不平产生的震动。
操作办法如下:1.悬挂震动控制:驾驶员通过调节悬挂系统来调整汽车的行驶舒适性,可根据实际需要适当调硬或调软悬挂。
2.轮胎气压调节:保持轮胎气压正常可以提高悬挂系统的工作效果,驾驶员应定期检查轮胎气压,并根据需要调整。
四、传动系统传动系统是汽车动力传递的关键,主要由发动机、离合器、变速器和传动轴等部件组成。
操作办法如下:1.离合器:当换挡时,通过左脚踩下离合器踏板,将发动机与变速器分离,以实现换挡的顺畅。
2.变速器:通过手动或自动变速器的操作,调节发动机的转速和输出扭矩,以改变汽车的速度和牵引力。
五、转向系统转向系统用于控制汽车的转向方向,包括前轮转向机构和方向盘等部分。
操作办法如下:1.方向盘:通过左右转动方向盘来控制汽车的转向方向。
方向盘向左转动,汽车向左转向;方向盘向右转动,汽车向右转向。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
汽车前轮转向机构目录1、题目:汽车前轮转向机构 (3)1.1设计题目 (3)1.2设计数据与要求 (4)1.3设计任务 (4)2、转向系统 (4)2.1转向系统概述及结构简介 (4)2.2转向系统的要求 (5)2.3传动比变化特性 (5)2.3.1转向系传动比 (5)2.3.2力传动比与转向系角传动比的关系 (6)2.3.3转向器角传动比的选择 (7)3、设计内容 (7)4、设计结构分析 (9)4.1 四种类型梯形机构的选择: (9)5、转向梯形机构优化 (10)5.1计算机构自由度: (11)5.2运动分析 (11)5.3机构设计方法 (11)5.4对比分析 (12)6、课程设计总结 (12)6.1 设计心得 (12)6.2 设计工作分工表 (13)6.3 参考文献 (13)引言转向系是用来保持或者改变汽车行使方向的机构,转向系统应准确,快速、平稳地响应驾驶员的转向指令,转向行使后或受到外界扰动时,在驾驶员松开方向盘的状态下,应保证汽车自动返回稳定的直线行使状态。
随着私家车的越来越普遍,各式各样的高中低档轿车进入了人们的生活中。
快节奏高效率的生活加上们对高速体验的不断追求,也要求着车速的不断提高。
由于汽车保有量的增加和社会活生活汽车化而造成交通错综复杂,使转向盘的操作频率增大,这要求减轻驾驶疲劳。
所以,无论是为满足快速增长的轿车市场还是为给驾车者更舒适更安全的的驾车体验,都需要一种高性能、低成本的大众化的汽车前轮转向机构。
本课题以现在国产轿车最常采用的齿轮齿条液压动力转向器为核心综合设计轿车转向机构。
1、题目:汽车前轮转向机构1.1设计题目汽车的前轮转向,是通过等腰梯形机构ABCD驱使前轮转动来实现的。
其中,两前轮分别与两摇杆AB、CD相连,如附图32所示。
当汽车沿直线行使时(转弯半径R=∞),左右两轮轴线与机架AD成一条直线;当汽车转弯时,要求左右两轮(或摇杆AB和CD)转过不同的角度。
理论上希望前轮两轴延长线的交点P始终能落在后轮轴的延长线上。
这样,整个车身就能绕P点转动,使四个轮子都能与地面形成纯滚动,以减少轮胎的磨损.因此,根据不同的转弯半径R(汽车转向行驶时,各车轮运行轨迹中最外侧车轮滚出的圆周半径),要求左右两轮轴线(AB、CD)分别转过不同的角度a和β,其关系如下:如附图32所示为汽车右拐时:tanα=L/(R-d-B) tanβ=L/(R-d)所以a和β的函数关系为:cotβ- cotα=B / L同理,当汽车左拐时,由于对称性,有 cotα-cotβ=B / L,故转向机构ABCD 的设计应尽量满足以上转角要求.附图321.2设计数据与要求设计数据见附表18,要求汽车沿直线行驶时,铰链四杆机构左右对称,以保证左右转弯时具有相同的特性.该转向机构为等腰梯形双摇杆机构,设计此铰链四杆机构.1.3设计任务1)、根据转弯半径R min 和R max=∞(直线行驶),求出理论上要求的转角α和β的对应值。
要求最少2组对应值。
2)、按给定两联架杆对应位移,且尽可能满足直线行驶时机构左右对称的附加要求,用图解法设计铰链四杆机构ABCD。
3)、机构初始位置一般通过经验或实验来决定,一般可在下列数值范围内选取a0 =96°~103°,β=77°~84°。
建议a取102°,β取78°。
4)、用图解法检验机构在常用转角范围α≤20°时的最小转动角γmin。
2、转向系统2.1转向系统概述及结构简介转向系统是汽车底盘的重要组成部分,转向系统性能的好坏直接影响到汽车行驶的安全性、操纵稳定性和驾驶舒适性,它对于确保车辆的行驶安全、减少交通事故以及保护驾驶员的人身安全、改善驾驶员的工作条件起着重要作用。
按转向力能源的不同,可将转向系分为机械转向系和动力转向系。
机械转向系的能量来源是人力,所有传力件都是机械的,由转向操纵机构(方向盘)、转向器、转向传动机构三大部分组成。
其中转向器是将操纵机构的旋转运动转变为传动机构的直线运动(严格讲是近似直线运动)的机构,是转向系的核心部件。
2.2转向系统的要求1、轿车转弯行驶时,全部车轮应绕瞬时转向中心旋转,任何车轮不应有侧滑。
不满足这项要求会加速轮胎磨损,并降低汽车的行驶稳定性。
2、轿车转向行驶时,在驾驶员松开转向盘的条件下,转向轮能自动返回到直线行驶位置,并稳定行驶。
3、轿车在任何行驶状态下,转向轮都不得产生自振,转向盘没有摆动。
4、转向传动机构和悬架导向装置共同工作时,由于运动不协调使车轮产生的摆动应最小。
5、保证轿车有较高的机动性,具有迅速和小转弯行驶能力。
6、操纵轻便。
7、转向轮碰撞到障碍物以后,传给转向盘的反冲力要尽可能小。
8、转向器和转向传动机构的球头处,有消除因磨损而产生间隙的调整机构。
9、在车祸中,当转向轴和转向盘由于车架或车身变形而共同后移时,转向系应有能使驾驶员免遭或减轻伤害的防伤装置。
10、进行运动校核,保证转向轮与转向盘转动方向一致。
2.3传动比变化特性 2.3.1转向系传动比转向系的传动比包括转向系的角传动比0ωi 和转向系的力传动比i P 。
传动系的力传动比:F F i W p /2= (1)转向系的角传动比:kk k w d d dt d dt d i βϕβϕωωω===//0 (2) 转向系的角传动比ωi 由转向器角传动比ωi和转向传动机构角传动组成,即:ωωωi i i '=0 (3) 转向器的角传动比:pp p w d d dt d dt d i βϕβϕωωω===// (4)转向传动机构的角传动比:kpk p k p d d dt d dt d i ββββωωω==='//(5)2.3.2力传动比与转向系角传动比的关系转向阻力F W 与转向阻力矩M r 的关系式:aM Fw r=(1) 作用在转向盘上的手力Fh与作用在转向盘上的力矩M h 的关系式:swhh D M F 2=(2) 将式(1)、式(2)代入hW p F F i /2=后得到:aM D M i h swr p =(3) 如果忽略磨擦损失,根据能量守恒原理,2Mr/M h 可用下式表示02ωβϕi d d M M kh r == (4)将式(1)代入式(2)后得到:aD i i swp 20ω=(5) 当a 和Dsw 不变时,力传动比p i 越大,虽然转向越轻,但0ωi也越大,表明转向不灵敏。
2.3.3转向器角传动比的选择转向器角传动比可以设计成减小、增大或保持不变的。
影响选取角传动比变化规律的主要因素是转向轴负荷大小和对汽车机动能力的要求。
若转向轴负荷小或采用动力转向的汽车,不存在转向沉重问题,应取较小的转向器角传动比,以提高汽车的机动能力。
若转向轴负荷大,汽车低速急转弯时的操纵轻便性问题突出,应选用大些的转向器角传动比。
汽车以较高车速转向行驶时,要求转向轮反应灵敏,转向器角传动比应当小些。
汽车高速直线行驶时,转向盘在中间位置的转向器角传动比不宜过小。
否则转向过分敏感,使驾驶员精确控制转向轮的运动有困难。
3、设计内容1、根据转弯半径 R min 和 R max=∞(直线行驶),求出理论上要求的转角α和β的对应值。
要求最少2组对应值。
R=R min 时,tan α=L/(R −d)=2900/(6100−400)=0.509 α=26.966° tanβ=L/(R −d −B)=2900/(6100−400−1605)=0.708 β=34.978°R=10000mm 时,tan α=L/(R-d)=2900/(10000-400)=0.302 α=20.886tan β=L/(R −d −B)=2900/(10000−400−1605)=0.363 β=25.629°根据公式可知,和随着转弯半径R 的增加而单调递减。
参考数据如下:2、按给定两联架杆对应位移,且尽可能满足直线行驶时机构左右对称的附加要求,用图解法设计铰链四杆机构ABCD 。
根据上图列唯一矢量方程:化简到x 和y 轴:对于该机构,AD 杆长已知,再给定AB 杆长及AB 与AD 夹角,该机构就确定了。
令β=34.978˚,α=26.966˚。
代入位移方程中。
得出一组l 及对应的φ和β。
令α=10,将上面求得的l 及值代入位移方程中,得出各种机构l 及φ 对应β的实际值。
再利用公式得出的理论值。
找出实际值中,与理论值最接近的一个。
所对应的l 及φ即为最佳机构。
最后计算出选出的机构当在0到最大值之间时所对应的的理论值和实际值。
x由表格数据可知,最佳机构为l=0.1,所对应的 为68.84°。
选定该机构后,检验其实际的可行性,让杆AB 转过角度,算出该机构运动时所对比较β的理论值和实际值可知,该机构的误差较大,故该梯形机构不是最理想的机构。
3、用图解法检验机构在常用转角范围α≤20°时的最小转动角γmin 。
机构在任意位置图示如下:如图所示,传动角,令。
把l 与为所选所对应的值。
代入位移方程。
计算出各转角对应的值。
则最小的值即为最小传动角γmin 。
4、设计结构分析1、 四种类型梯形机构的选择:汽车转向梯形机构如下图所示共有四种可能的类型:A机构可行的必要条件是当机构转动时,前轮两轴延长线的交点P 能落在后轮轴的延长线上。
当研究车辆右转时,左边连架杆的转角α小于右边连架杆的转角β。
易知,(a )、(d )两种机构均可行. 而对于(b)、(c)机构,当这两种机构右转时,α大于β,所以这两种机构是不可行的。
结构(a )(d )是平面四杆机构结构简单,虽然设计制造比较方便,但其性能有着较大的局限性,上面我们已经研究过,误差较大,无法保证前轮两轴延长线的交点P 能落在后轴上,所以不是最理想机构。
5、转向梯形机构优化转向梯形机构用来保证汽车转弯行驶时所有车轮能绕一个瞬时转向中心,在不同的圆周上做无滑动的纯滚动。
设计转向梯形的主要任务之一是确定转向梯型的最佳参数和进行强度计算。
一般转向梯形机构布置在前轴之后,但当发动机位置很低或前轴驱动时,也有位于前轴之前的。
转向梯形有整体式和断开式两种,选择整体式或断开式转向梯形方案与悬架采用何种方案有联系。
无论采用哪一种方案,必须正确选择转向梯形参数,做到汽车转弯时,保证全部车轮绕一个瞬时转向中心行驶,使在不同圆周上运动的车轮,作无滑动的纯滚动运动。
同时,为达到总体布置要求的最小转弯直径值,转向轮应有足够大的转角。
(a )(c )(d )由机械原理易知,平面四杆机构结构简单,虽然设计制造比较方便,但其性能有着较大的局限性。
如上面的设计过程,尽管在无数种机构中找到了最佳机构,但运动起来误差依然较大,无法保证前轮两轴延长线的交点P能落在后轴上。