非线性数学模型的线性化
非线性模型的线性化方法
提高计算效率
线性模型通常具有更简单的计算形式,可以更快地求解,提高模型 的计算效率。
扩展应用范围
线性模型在许多领域都有广泛的应用,线性化方法可以扩展非线性模 型的应用范围。
缺点
近似误差
线性化方法通常是对非线性模型 的近似,可能引入一定的误差, 特别是在非线性较强的模型中。
考虑模型的物理意义和实际应用背景,选择一个具有代表性的
点作为线性化点。
通过交叉验证和比较不同线性化点的拟合效果,选择最优的线
03
性化点。
对非线性模型进行线性化转换
01
02
03
将非线性模型在所选的 线性化点处进行泰勒级 数展开,得到线性化模
型。
保留级数展开的前几项 ,舍弃高阶项以避免过
拟合。
根据实际需求和数据特 点,选择适合的线性化 方法,如对数转换、幂
非线性模型的特点
复杂性和不确定性
非线性模型通常具有复杂性和不确定性,难以预测和控制。
动态性和时变性
非线性模型中的变量通常具有动态性和时变性,即随着时间的推 移,变量之间的关系可能会发生变化。
相互作用和耦合
非线性模型中的变量之间通常存在相互作用和耦合,即一个变量 的变化可能会对其他变量产生影响。
非线性模型的应用场景
函数转换等。
验证线性化模型的准确性
01
使用独立的数据集对线性化后的模型进行验证,评估其预测 精度和稳定性。
02
比较线性化模型和非线性模型在验证数据集上的表现,以评 估线性化的效果。
03
如果线性化后的模型表现不佳,可能需要重新选择线性化点 或尝试其他线性化方法。
非线性模型的线性化方法
(7-19)
6.2072 dLnyt dyt / yt , 6.2072 dyt / yt
dLnLnxt
1 Lnxt
1 xt
dxt
Lnxt dxt / xt
弹性系数不是常量,是弹性函数 6.2072/ Lnxt。说明人均食品支出对人均收入的 弹性系数是随着城镇人均收入的增加而减小。当城镇人均收入为 1000 元水平
LnQt = Ln + LnLt + LnCt + ut
(7-6)
取 yt = LnQt, 0 = Ln, 1= , 2= , xt1 = LnLt, xt2 = LnCt,可写为,
yt= 0 +1 xt 1 + 2 xt 2 + ut
(7-7)
为线性模型。只要 ut 满足第 5 章给出的假定条件,用 OLS 法估计式(7-7),再 返回到原模型(7-5)。根据新古典增长理论, 若回归参数 1 + 2 = + = 1,则称该模型为规模报酬不变型。 若回归参数1 + 2 = + > 1,则称模型为规模报酬递增型。 若回归参数1 + 2 = + < 1,则称模型为规模报酬递减型。
log(y) c log(x) 这样写的好处是,模型可以直接预测到 y。
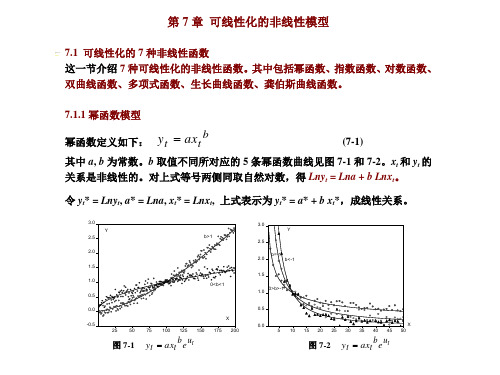
7.1.2 指数函数模型
指数函数定义如下: yt aebxt
b>0 和 b<0 两种情形的函数曲线分别见图 7-3 和 7-4。xt 和 yt 呈指数函数关系, 是非线性的。对上式等号两侧同取自然对数,得
Lnyt = Lna + bxt
第 7 章 可线性化的非线性模型
7.1.2 指数函数模型
由式 Lnyt = Lna + bxt,得
03-非线性回归模型的线性化
yˆt aˆxtbˆ
• 用来测量当 xt变化 1%时 yt变化 % • 柯布-道格拉斯生产函数模型就是幂函数模型
Qt Lat Ct eut
• 其中Qt表示生产量,Lt表示生产力投入,Ct表示资本投入 量, ,, 是需要被估计的回归系数
• 请对上述模型线性化
• 若回归系数 1 时,该模型是报酬不变型; • 若回归系数 1 时,该模型是报酬递增型; • 若回归系数 1 时,该模型是报酬递减型。 • 例3-1 • 利用柯布--道格拉斯生产函数模型评价中国台湾农业生产
• 例3-5
(b1<0, b2>0, b3<0)
(6) 生长曲线 (logistic) 模型
yt
k
1 e f (t)ut
k
1 e abtut
美国人口统计学家Pearl和Reed广泛研究了有机体的生长,得到了上述数学
模型。生长模型(或逻辑斯谛曲线,Pearl-Reed曲线)常用于描述有机体生
长发育过程。其中k和0分别为yt的上限和下限。
•当a>0,
Lim
t
yt
,k当a>0,b>0,
Lim
t-
yt
0
•曲线有拐点,坐标是 ( Lnb , k,) 但是曲线关于拐点不对称
ae
•对于龚伯斯曲线线性化的前提也是必须知道k的取值,
•线性化过程
yt* Lnb at ut 0 1t ut
其中
yt*
Ln
k yt
1
•案例3-1,3-2,3-3.
yt 0 1xt* ut
变量yt 和xt* 已变换成为线性关系。
(4) 双曲线函数模型
非线性回归模型的线性化

p f p ( X1, X 2 , , X k ) +u
令
Z1 f1(X1, X2, Z2 f2(X1, X2,
, Xk) , Xk)
Zp fp(X1, X2, , Xk )
则可以把原模型转化为一个标准的多元线性回归模型
Y 0 1Z1 2Z2 pZ p u
6
下面介绍在经济问题时经常遇到的几种非标准线性 回归模型
p fp(X1, X2, , Xk )
2024/10/17
5
4.2线性化方法
1、非标准线性回归模型的线性化方法 非标准线性回归模型的线性化方法是变量替换法。
非标准线性回归模型的一般形式为:
Y 0 1 f1( X1, X 2 , , X k ) 2 f2 ( X1, X 2 , , X k )
Yi* bX i ui
2024/10/17
16
(2)幂函数模型(全对数模型)
幂函数模型的一般形式为:
Yi
AX
1 1i
X
2 2i
X e k ui ki
对上式两边取对数得到:
ln Yi ln A 1 ln X1i 2 ln X 2i k ln X ki ui
令
Yi*
ln Y , 0
在这样一些非线性关系中,有些可以通过代数 变换变为线性关系处理,另一些则不能。下面我们 通过一些例子来讨论这个问题。
2024/10/17
1
线性模型的含义
线性模型的基本形式是:
Y 0 1X1 2 X 2 ...... k X k u
线性模型的线性包含两重含义:
(1)变量的线性
变量以其原型出现在模型之中,而不是以 X 2 或
(1)多项式函数模型 多项式函数模型的一般形式为:
非线性回归模型的线性化讲解
( b1>0, b2>0)
(b1<0, b2 <0
(2) 双曲函数模型
1 1 ui 双曲函数模型的一般形式为: Yi Xi 1 1 令 * * Yi , Xi Yi Xi
则可将原模型化为标准的线性回归模型
Yi X ui
* * i
双曲线函数还有另一种表达方式,
ln GDP i ln A ln Ki ln Li ui
Yi ln GDP i , X 1i ln Ki , X 2i ln Li
0 ln A, 1 , 2 则可将C-D生产函数模型转换成标准的二元线性回归模型
Yi 0 1 X1i 2 X 2i ui
Z p f p ( X1, X 2 ,, X k )
Y 0 1Z1 2 Z2 p Z p u
7
下面介绍在经济问题时经常遇到的几种非标准线性 回归模型 (1)多项式函数模型
多项式函数模型的一般形式为:
Yi 0 1 X i 2 X i2 k X ik ui
首先对上式做倒数变换得:
1 e X i ui Yi
令
1 Yi , X i* e X i Yi
*
则可将原模型化为标准的线性回归模型
Yi* X i* ui
15
2 可线性化的非线性回归模型的线性化方法
下面几种在研究经济问题时经常遇到的可线性化的非线性 回归模型 (1)指数函数模型
yt = b0 +b1 x 1t + b2 x 2t + b3 x 3t + ut 这是一个三元线性回归模型。如经济学中的总成本与产 品产量曲线与左图相似。
非线性系统线性化课件

详细描述
倒立摆是一种典型的非线性系统,其动态行 为非常复杂。为了更好地分析和设计倒立摆 系统,可以使用线性化方法将其转化为线性 系统。通过这种方法,可以更好地理解倒立 摆系统的动态行为,并设计有效的控制策略 。
实例三:机器人系统线性化
总结词
机器人系统是一种复杂的非线性系统,其动 态行为可以通过使用线性化方法进行近似描 述。
非线性系统线性化的展望是通过不断的研究和发展,提高非 线性系统线性化的精度和稳定性,为实际工程应用提供更好 的理论支持和实践指导。
05
CATALOGUE
非线性系统线性化实例分析
实例一:非线性振荡器系统线性化
总结词
通过使用非线性振荡器系统的线性化方法,可以更好地理解非线性系统的动态行为,并 设计有效的控制策略。
02
解决数值稳定性问题的方法包括 采用高精度计算方法、引入阻尼 项、采用自适应控制策略等,以 提高数值计算的稳定性和精度。
近似误差问题
近似误差问题是指在进行非线性系统 线性化时,由于对非线性系统的近似 处理,导致线性化结果与实际非线性 系统的偏差。
解决近似误差问题的方法包括采用更 精确的近似方法、引入补偿控制策略 等,以减小近似误差对线性化结果的 影响。
泰勒级数展开法的基本思想是将非线性函数在某一参考点处进行幂次展开,形成 无穷级数。通过选取适当的参考点,可以使得级数的前几项近似于非线性函数, 从而得到近似的线性化模型。该方法适用于具有局部特性的非线性系统。
状态空间平均法
总结词
状态空间平均法是一种基于状态空间模型的非线性系统线性化方法,通过将非线性系统在平均状态空间上进行线 性化,可以得到近似的线性模型。
详细描述
描述函数法的基本思想是非线性系统的输入输出关系可以用一个描述函数来描述。描述函数具有一些 特定的特性,如频率响应和相位响应等。通过比较这些特性与线性系统的相应特性,可以得到近似的 线性化模型。该方法适用于具有特定特性的非线性系统。
非线性化模型的线性化方法总结
非线性化模型的线性化方法总结在学习计量经济学过程中,我们所接触的经济学模型不仅仅是线性的,许多实际经济活动中的经济模型都是非线性的,例如恩格尔曲线表现为幂函数曲线形式,菲利普斯曲线表现为双曲线形式,下面介绍三种非线性模型的转化方法,分别适应于不同的模型:一、直接置换法:直接替换模型中原有的非线性变量。
适用模型如下:(1)倒数(双曲线)模型:0111u Q P ββ=++,可以用1Y Q =,1X P=来置换,变为01Y X u ββ=++(2)多项式模型:2012Y t t u βββ=+++,可以用212,X t X t ==来置换变为: 0122Y X X u βββ=+++(3)对数模型: 01ln Y X u ββ=++,将1ln X X=带入原式进行置换,得到:011Y X u ββ=++二、函数变换法:通过函数变化,如取对数、移项等方式对原模型进行变形以得到线性化模型:12(,,,)k Y f X X X u =⋅⋅⋅+(1) 幂函数模型:u Q AK L e αβ=,方程两边取对数,得到:ln ln ln ln Q A K L u αβ=+++再对上式进行置换。
(2)指数函数模型:Q uC ab e =,方程两边取对数得到:ln ln ln C a Q b u =++,再对上式进行置换。
三、级数展开法:如CES 函数112()p p u pQ A K L e δδ---=+,方程两边取对数得到:121ln ln ln()p p Q A K L u pδδ--=-++,将式中12ln()p p K L δδ--+在p=0处展开泰勒级数,取关于p 的线性项,即得到一个线性近似式,如取0阶、1阶、2阶项,可得:212121ln ln ln ln [ln()]2K Y A K L p Lδδδδ=++- (备注:无法线性化的模型一般为:12(,,,)k Y f X X X u =⋅⋅⋅+,其中12(,,,)k f X X X ⋅⋅⋅为非线性函数)。
02 数学模型 - 03非线性微分方程的线性化
第二章控制系统的数学模型第3讲非线性微分方程的线性化王燕舞为什么要进行线性化?严格的说,几乎所有元件或系统的运动方程都是非线性方程,即输入、输出和扰动等之间的关系都是非线性的。
非线性微分方程的求解和控制系统性能研究非常复杂,而线性化后的模型可借助叠加原理的性质,简化系统分析。
因此,研究非线性微分方程的线性化具有较强的工程实用价值。
什么是非线性数学模型的线性化?在一定的条件下或在一定范围内把非线性的数学模型化为线性模型的处理方法。
符合什么条件的系统可以进行线性化呢?▪条件1: 小偏差理论或小信号理论。
在工程实践中,控制系统都有一个额定的工作状态和工作点,当变量在工作点附近作小范围的变化时,就满足这个条件。
▪条件2: 在工作点附近存在各阶导数或偏导数。
如何进行线性化呢?假设微分方程模型中包含非线性函数f(x)如图所示。
设y=f(x),假设系统在工作点(x 0, y 0), y 0=f(x 0) 附近变化,且在该工作点处各阶导数均存在,在(x 0, y 0)附近将y 展开成泰勒级数:)()()()(000xx x x x f x f x f y -⎥⎦⎤⎢⎣⎡∂∂+==若偏差Δx=x-x 0很小,可忽略级数中高阶无穷小项,上式化为)()()()()()(00000x xK x f x x x x x f x f x f y -+=-⎥⎦⎤⎢⎣⎡∂∂+≈=K 表示y=f(x)曲线在(x 0,y 0)处切线的斜率。
因此非线性函数在工作点处可以用该点的切线方程线性化。
yy=f(x)y 0x 0x ⋯+-⎥⎦⎤⎢⎣⎡∂∂+20022)()(!21x x x x x f xK x f x f y y y ∆=-=-=∆)()(00如何进行线性化呢?小偏差法:在给定工作点的邻域将非线性函数展开为泰勒级数,忽略级数中的高阶项,得到只包含偏差的一次项的线性方程。
液位流体过程。
如图,Q1为流入量,也是输入量;Q 2为流出量;h 为液位高度,为系统输出;C 为液缸的截面积。
第四章 非线性回归模型的线性化讲解
线性回归模型 最小二乘法求解 若不是线性回归模型,又该如何求解呢?
(一)变量关系非线性问题:
若:(1)、变量
Y 和
X 1 , X K
之间不存在
多元线性随机函数关系
Y 0 1 X 1 K X K
那么我们如何估计出模型中的未知参数呢?
Dependent Variable: Y Method: Least Squares Date: 10/08/08 Time: 13:51 Sample: 1980 1996 Included observations: 17 Variable Coefficient C -10.46551 X1 1.021132 X2 1.472202 R-squared Adjusted R-squared S.E. of regression
(2)可线性化的非线性回归模型: 虽然被解释变量Y与解释变量X1X 2 .....X k以及与未知 参数 0 1...... k 之间都不存在线性关系,但是可以转化 为线性函数。例如: 生产函数模型: Y AK L e 转化为: ln Y LnA LnK LnL (3)不可线性化的非线性回归模型: 被解释变量Y与解释变量X1X 2 .....X k以及与未知 参数 0 1...... k 之间都不存在线性关系,而且无法转化 为线性函数。 例如:Y 0 1e 1x1 2 e 2 x2
0.99841 S.D. dependent var 0.029873 Akaike info criterion
变量间的非线性关系
(1)非标准线性回归模型: 虽然被解释变量Y与解释变量X1X 2 .....X k 之间 不存在线性关系,但与未知参数 0 1...... k 之间 存在线性关系。例如: 根据平均成本与产量为U型曲线理论,总成本C 可以用产量X的三次多项式来近似表示,得到总成 本函数模型如下: C 0 1 X 2 X 2 3 X 3
非线性函数的线性化问题
D(X)= 2 X X X X X t t 1 t 2
2 X X X X1X 2 1 t 1 2 X X X X2Xt 2 1 2
协方差阵传播率
E X E (( X 12 )) 随机向量X的数学期望E(X)是由E(X)= E (X ) t 定义的,它具有如下性质:
则有
A ( k ) X ( k 1) L ( k ) R
(k )
ε 0
(6)
在式(6)中,将 换成估值形式 ,用 代表 的最或然误差 (又称为 的改正数),则有
V 1( k ) (k ) V 2 V (k ) n
(D(L1)+D(L2)+·· ·+D(Ln)).
n
2
如果D(L1)=D(L2)=·· ·=D(Ln)=σ2,则上式为 D(x)= 令
D (x)
,
n
=σx,则有 σx=
式中σ和σx分别为观测值和算术平均值的标准差,标准 差在测量中称为中误差。
二.协方差及其传播律
1.协方差的概念及定义
设有线性函数 z=f1x+f2y, 令x,y的真误差为⊿x,⊿y,则z的真误差⊿z 为 ⊿z=f1 ⊿x+f2 ⊿y. ⊿y
ξ
1
(3)n个随机变量之和的数学期望,等 于各随机变量数学期望之和,即 E(ξ1+ξ2+·· n)=E(ξ1)+E(ξ2)+·· ξ ). ·+ξ ·+E随机变量的线性函数 F=α1ξ1+α2ξ2+·· αnξn= ·+ 的数学期望为 E( )= α1E(ξ )+ α2E(ξ2)+·· α E(ξn). ·+
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
非线性数学模型的线性化
假设有一个输入为 )(t x 、输出为 )(t y 、其输入-输出关系为 ()x f y =的系统,如图3.52所示, )(t y 与 )(t x 之间具有非线性关系。
),(00y x A 为系统的工作点,即 )(00x f y =,在A 点附近,当输入变量 )(t x 作 x ∆变化时,对应的输出变量的增量为 y ∆。
而对于通过 A 点的切线, x 变化 x ∆时, y 的增量为 'y ∆。
显然,当 x 在平衡工作点A 附近只作微小的变化 x ∆,则 y ∆≈'y ∆,故可近似地认为有
y ∆≈xtga y ∆=∆' (3.88)
式中 tga ——函数 ()x f y =在 ),(00y x A 点处的导数。
图3.52 非线性关系线性化
以增量为变量的微分方程,称为增量方程,故式(3.88)为线性增量方程。
由此可见,在滑动范围内, y ∆可用 'y ∆近似而和 x ∆有线性关系,即可用切线代替原来的非线性曲线,从而把非线性问题线性化了。
这种线性化方法,称为滑动线性化法,或切线法。
滑动线性化的这种近似,对大多数控制系统来说都是可行的。
首先,控制系统在通常情况下,都有一个正常的稳定的工作状态,称为平衡工作点。
例如,恒温控制系统的正常工作状态是输入、输出为常值(输出为被控温度,输入为期望值)。
其次,当系统的输入或输出相对于正常工作状态发生微小偏差时,系统会立即进行控制调节,力图去消除此偏差,因此可以看出,这种偏差是“小偏差”,不会很大。
滑动线性化这种近似,用数学方法来处理,就是将变量的非线性函数展开成泰勒级数,分解成这些变量在某工作状态附近的小增量的表达式,然后略去高于一次小增量的项,就获得近似的线性函数。
对于以一个自变量作为输入量的非线性函数 ()x f y =,在平衡工作点 ),(00y x 附近展开成泰勒级数,则有
()
()()()()()()0002323000023d d d 11()d 2!d 3!d x x x x x x f x f x f x y f x f x x x x x x x x x x =====+-+-+-+
略去高于一次增量 0x x x -=∆的项,便有
()()()000d d x x f x y f x x x x ==+- (3.89)
或
<![endif]> (3.90)
式中, )(00x f y =称为系统的静态方程; 0d ()
d x x f x K x ==。
式(3.89)或式(3.90)就是非线性系统的线性化数学模型。
式(3.90)为增量方程式。
若输出变量 y 与输入变量 1x 、 2x 有非线性关系,即 ),(21x x f y =,那么同样地将这个方程式在工作点 ),(2010x x 附近展开成泰勒级数,并忽略二阶和高阶导数项,便可得到 y 的线性化方程为
)
()(),(20221011201020210120
2101x x x f x x x f
x x f y x x x x x x x x -∂∂+-∂∂+=====(3.91) 写成增量方程式,则有
22110x K x K y y y ∆+∆=∆=-
(3.92) 式中, ),(20100x x f y =为系统静态方程, 2021012021012211;x x x x x x x x x f K x f K ====∂∂=∂∂=。