Maya人物绑定方法教程——腿部绑定
maya角色绑定教程

● 武汉市洪山区兆富国际大厦2603A ,430074 ●+86(027)87870255 87877031 ● 2603A, Block One, Forture International Building, wuhan ,China 430074 ●Web:maya 角色绑定教程 (一, 创建骨骼部分)创建骨骼命令在animation 的面板当中,skeleton>joint tool,我们在创建骨骼之前,先分析下骨骼的属性。
打开joint tool后面的方块进入骨骼的属性当中,骨骼是有方向性的,和两个方向是常用的。
以xyz 方式为例,x 轴指向关节延伸的方向,y 和z 其实没什么意义;同理yzx 就是y 轴指向关节延伸的方向。
原则上这个选项可以随便选,但最好统一一下,一般对齐关节都选xyz 方式就可以了。
而None 则是和世界坐标轴一致的。
在单独调整骨骼时,要始终保持骨骼的旋转属性为0。
我们在创建骨骼时,最好保证骨骼在模型的中间,这样在后面分配权重的时候,就能减轻我们的工作量。
在创建骨骼之前,先创建一个图层,命名为boy_mo ,将模型添加到图层当中,锁定线框显示。
步骤1:为脚部创建骨骼,将maya 的操作视图转到(side )侧视图,在侧视图中,我们从大腿跟部向脚踝方向创建出腿部骨骼。
A_leg_L_bn ,A_knee_L_bn ,A_ankle_L_bn 。
骨骼方向选择xyz 方向。
我们创建出来的骨骼就会在网格上产生,将它移动到然后在工具栏中,进入骨骼的子级别,将激活。
统一骨骼的旋转方向:选择最后一节骨骼的方向坐标轴,skeleton>orient tool ,点击后面的小方框,在属性当中修改orientation 的属性为none ,应用。
让他和其他骨骼方向统一。
如图1-1所示。
旋转大腿根部的骨骼,统一方向后要记得回到物体级别。
如图所示。
步骤2:我们在前视图中可以看出,我们的骨骼不能很好的和模型对位,将骨骼自身成组,选择组,按insert 键,v 键点吸附到骨骼链的根关节上,完成后再次按insert 键,切换到正常模式。
maya角色绑定教程
● 武汉市洪山区兆富国际大厦2603A ,430074 ●+86(027)87870255 87877031 ● 2603A, Block One, Forture International Building, wuhan ,China 430074 ●Web:maya 角色绑定教程 (一, 创建骨骼部分)创建骨骼命令在animation 的面板当中,skeleton>joint tool,我们在创建骨骼之前,先分析下骨骼的属性。
打开joint tool后面的方块进入骨骼的属性当中,骨骼是有方向性的,和两个方向是常用的。
以xyz 方式为例,x 轴指向关节延伸的方向,y 和z 其实没什么意义;同理yzx 就是y 轴指向关节延伸的方向。
原则上这个选项可以随便选,但最好统一一下,一般对齐关节都选xyz 方式就可以了。
而None 则是和世界坐标轴一致的。
在单独调整骨骼时,要始终保持骨骼的旋转属性为0。
我们在创建骨骼时,最好保证骨骼在模型的中间,这样在后面分配权重的时候,就能减轻我们的工作量。
在创建骨骼之前,先创建一个图层,命名为boy_mo ,将模型添加到图层当中,锁定线框显示。
步骤1:为脚部创建骨骼,将maya 的操作视图转到(side )侧视图,在侧视图中,我们从大腿跟部向脚踝方向创建出腿部骨骼。
A_leg_L_bn ,A_knee_L_bn ,A_ankle_L_bn 。
骨骼方向选择xyz 方向。
我们创建出来的骨骼就会在网格上产生,将它移动到然后在工具栏中,进入骨骼的子级别,将激活。
统一骨骼的旋转方向:选择最后一节骨骼的方向坐标轴,skeleton>orient tool ,点击后面的小方框,在属性当中修改orientation 的属性为none ,应用。
让他和其他骨骼方向统一。
如图1-1所示。
旋转大腿根部的骨骼,统一方向后要记得回到物体级别。
如图所示。
步骤2:我们在前视图中可以看出,我们的骨骼不能很好的和模型对位,将骨骼自身成组,选择组,按insert 键,v 键点吸附到骨骼链的根关节上,完成后再次按insert 键,切换到正常模式。
MAYA简单绑定(个人方式,纯手打)
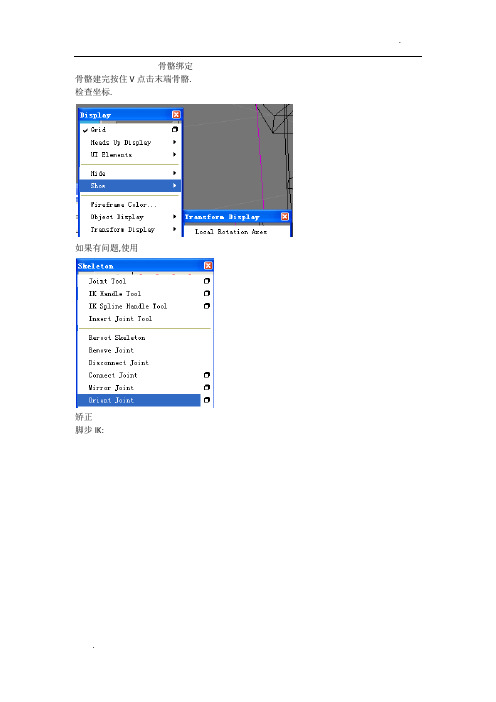
骨骼绑定骨骼建完按住V点击末端骨骼. 检查坐标.如果有问题,使用矫正脚步IK:IK点选:1-3 ,3-4,4-5.形成三个IK.分别为1.2.3号IK.将IK 2 .3 打组(组一).重心移动到骨骼4.IK 1 打组(组二).重心移动到骨骼4.组一组二打组(组三).重心移动到骨骼5.组三再打一个组.(组四)重心移动到脚后跟.组4再打组.(组五)重心移动到骨骼3.创建任意一个图形作为控制器.打组.选择组.将其移到合适位置. 先选控制器.再选组五..选择控制器.将冻结隐藏.(右键) 属性栏右键添加一个属性.属性添加:方法一:打开先选择控制器.再选择被控制的组.在左边找到添加的属性.在右边找到需要链接的属性.Rotatex就能用ball 来控制. 方法二.打开先选控制器.载入驱动.然后选组.载入被驱动.当ball为0的时候.调整rotateX为默认值.当ball为极限值时.调整roratwX到极限值.K帧. 身体:.手臂FK:1.先建立1号控制器.打组.先选骨骼再选1号控制器的组.打开window-outliner将刚刚执行的命令删掉.将控制器的组.复制.ctrl+D.然后先选骨骼再选复制出来的组.继续执行点和方向的约束.如此创建图中1-7号控制器.2.打开outliner,选到7号控制的组.将其拖入6号控制器目录下..如此类推.需要注意的是3号不需要与2号如此.只需要将3号和骨骼2-3 命令P.然后每个控制器对各自的骨骼.执行方向约束命令即可.需要注意的是.2号控制器只有Y轴的旋转.FK就建立好了.IK:在1,3之间执行IK命令.建立如图8号控制器.打组.将其移动到IK手柄.8号跟IK手柄作点约束.添加一个名为IK_FK的属性将控制器和IK手柄导入.设置为.当IK_FK 切换为IK时.IK手柄属性中值为1.(IK完全影响)切换为FK时.值为0.即IK不影响.IK完成.然后将肩膀的骨骼建立出来.连接到胸骨.胸骨.肩部.上臂的控制器都有承接关系.(FK的做法) 承接关系中.应该是上一个骨骼影响下一个控制器的组.控制器的数据必须为0.只要不是控制器的作用.其他外力都不能改变控制器的属性数值.建立附件的骨骼.都需要P给靠近的主干骨骼.或者影响他的骨骼.建立两个Locator,打组.捕捉到膝盖.对腿的IK手柄.执行控制膝盖方向.权重:将骨骼和需要影响的模型全部选中.执行.(软)打开权重笔刷.骨骼名字最好便于认识.最好一开始就改.选到模型.选中骨骼.刷权重!刷权重的时候可以选中点,然后打开查看点被影响的情况.视情况修改. 整理!。
MAYA创建三维卡通人——腿部和脚部

第七周创建三维卡通人——腿部和脚部学习目标:用maya制作三维机器人的腿部和脚部。
知识点:1、加线工具的使用。
2、挤压工具的使用。
重点: 1、挤压工具的使用。
课时安排:第七周10课时课后作业:根据所讲知识,熟练的掌握maya人物的布线过程的使用。
制作过程:1.打开正视图我们来看看腿部的位置和结构。
2.选择胯骨底部合适的位置加入线段,将生成的圆洞删除掉。
3.积压圆洞的边缘使其形成向内部延展的洞型结构。
4.复制一个肩膀部分的连接结构作为我们机器人胯骨与腿部的连接结构。
旋转调整位置并缩放它的大小。
5.复制两个之后,我们建立一个圆柱体作为大腿部分的基本模型。
6.给腿部顶端加入几排环形线,然后给环形线的点加上晶格。
7.旋转调整晶格的位置,使其带动模型发生变化。
8.编辑腿部模型底面的线段,积压出一个连接结构。
方法参考手臂连接结构的制作方法。
9.建立一个圆柱体作为小腿部分的基本结构。
调整形状使其符合参考图的形状。
10.积压小腿部分的顶面形成一个平台形状的连接部分。
11.编辑顶面并建立出对应大腿结构的连接部分。
12.选择小腿部分的底面我们来创建腿部和脚部的连接结构。
13.进入侧视图我们来制作机器人的脚。
机器人的脚分为前后两个部分。
14.我们创建一个立方体作为脚的后半部分。
调整点的形状使其符合参考图的形状。
15.加入环形线调整机器人脚部的形状。
16.选择脚部的顶面积压出一个面作为脚踝的连接部分。
给连接部分的四周加入环形线。
17.进入侧视图我们来创建脚的前半部分。
首先建立一个立方体作为基本形状,调整点的位置使其符合参考图的形状,并给模型加入环形线。
18.加入垂直的两条环形线,积压出两个连接结构。
19.选择后脚的部分积压出一个面作为与前脚的连接部分。
20.最后进入立体视图调整一下脚的形状。
这样我们机器人的脚部就做完了。
maya骨骼绑定详细教程

反转脚1.创建好腿部骨骼和反转脚2.创建腿部ik控制器3.先选择反转脚在选择反转脚离ik最近的骨骼设置点约束如下图坐标轴的位置的骨骼4.在选择反转脚在选择第二个骨骼和脚步骨骼的第二个骨骼设置方向约束5.绿色的是骨骼白色的是翻转角选择蓝色数字1下面的白色骨骼和红色数字1琐事的骨骼便是第四部的设置6.选择蓝色数字2下的白色骨骼和红色数字2所示的骨骼设置方向约束。
要先选择翻转角在选择翻转角上的骨骼约束要保持偏移和所有轴7.下图是脚后跟抬脚脚尖抬脚打组方式控制脚步运动去除刚才翻转角的设置1.选择ik sc 选择脚踝的关节在选择脚中间的骨节打上ik sc2.选择中间的骨节在选择脚尖的骨节打上ik sc3.选择腿部ik 和中间ik 打上组shift 加选两个ik 然后Ctrl+G 打组4.他们的坐标不在中间骨节哪里我们按住d 并且按住v键坐标会自动吸附到骨骼上5.在大纲视图里选中组1 旋转法线脚尖也在运动选择脚尖的ik 按住Ctrl+a 选择ik3的ik控制手柄属性选择粘滞这样脚尖就不会跟着运动了脚中间抬脚6.选择组1在选择脚尖ik 打组将坐标移到脚尖的位置可以做脚尖的抬脚动画7.在对组组3进行打组并将坐标移动到脚跟骨节的位置可以做到脚跟抬脚的动画脚步控制器的制作去除刚才ik sc打组的设置打开反转脚用曲线做出和脚形状类似的形状先选择反转脚在选择线按p键将反转脚和曲线做个父子约束选择曲线将中心调到脚跟位置按d 键v键就可以膝关节控制器的制作选择创建-文本输入l为左脚的控制器选择l 按住d键将坐标调到中间然后按住v键将他吸附到膝关节的位置在往前来一点距离清除历史冻结变换选择控制器选择ik选择极向量约束可以用控制器调节膝关节的移动选择控制器在选择脚步的控制器按住p键将两个做一个父子约束为脚部控制器创建管理属性选择脚步控制器在层编辑器选择编辑-属性-添加属性我们可以为属性命名和最大值最小值初始值层通道盒子会显示刚才添加的属性选择窗口-常规编辑器-连接编辑器打开属性连接面板选择关节9即是我们要用这个属性控制的关节点击重新加载右侧在左侧找到抬脚属性一般在最下面在选择右侧在右侧找到关节9的z轴旋转属性rotatez 即是z轴的旋转属性然后直接关闭属性连接器调整抬脚属性的数值看看有没有变化按住中键左右拖动改变数值如果感觉第一次设置的抬脚属性的数值不满意可以选择抬脚-编辑-编辑属性选择抬脚改变数值同样的方法为关节9设置左右旋转的属性为脚尖设置抬脚的属性设置受驱动关键帧控制抬脚去除刚才属性编辑器的设置重新添加抬脚属性设置-20 最大值20默认值0选择抬脚属性编辑-设置受驱动关键帧加载抬脚属性为驱动者选择骨骼7 ,8 ,9加载受驱动者除了离ik最近的骨骼其他三个要全选选择脚步控制器的抬脚数值输入0在选择关节9选中要控制的轴点击驱动关键帧的关键帧选项就给这个动作在抬脚数值是0的时候设置了关键帧然后选择抬脚属性将属性设置为10 选择关节9的z轴然后调整z轴旋转的位置点击关键帧这样就在当抬脚属性是10的时候z轴旋转的位置接着为关节7设置属性和关节9一样只不过他的数值不是0-10而是10到20 当抬脚属性是10的时候关节8是一个状态当关节8是20的时候又是一个状态关节7同样设置可以0—20之间做出变换属性手指关节的创建1.新建一个平面2.将平面移动到小指处将平面作为参考面做出骨骼平面分段为10.103.选择激活选定对象最后一个磁铁就是激活选定对象4.选择骨架进行创建骨骼5.选择骨架确定关节方向使关节方向一致6.同样的方法为大拇指创建骨骼7.8.完成人体的绑定在绑定下部的时候要多留一个骨节作为选择所有骨节的关节9.将做好的骨骼ik 控制器分别放进不同的层里手臂骨骼绑定ik控制器首先为手臂创建ik控制手柄在为手臂创建控制器,一般先用圆形曲线做控制器选择圆形控制器选择ik进行点约束保持偏移所有坐标在选择控制器选择手关节进行方向约束用圆形控制器控制手骨骼的旋转选择创建-定位器将定位器放置到手肘的关节上按v键吸附到手肘的位置向后移动一下位置选择定位器选择ik 给他们添加极向量约束这样手臂在运动的时候手肘也会运动的还有一种方法可以控制肘部就是连接编辑器为圆形控制器添加属性zhoubu为zhoubu添加属性最大10最下-10默认0选择zhoubu-编辑-连接属性编辑器用zhoubu控制ik的twist属性就是ik的扭曲属性手指关节的控制器创建一个圆形的控制器来控致手指的弯曲我们为控制器创建一个弯曲z轴的属性选择弯曲z-属性-连接编辑器-选择弯曲z选择手指关节3跟关节都选上然后在编辑器里选择载入右侧选择关节的z轴旋转属性在选择第二个关节如上图选择重新载入右侧我们重新选择第二跟关节的z轴旋转选择第三根关节选择编辑器里重新载入右侧我们重新为最后一个关节连接旋转属性也就是用控制器的旋转属性控制三根骨节的z轴旋转选择控制器在添加一个y轴的旋转添加y轴旋转只要选择手指控制器和手指关节创建一个xuanzhuany轴的属性连接编辑器只要对3跟骨节创建一个整体的旋转就可以了其他手指的创建和上面的方法一样另外做完后要为手指控制器和手部控制器做一个父子连接将手指控制器p到手控制器上手臂fk控制器的创建创建一个圆形的控制器将他移动到肩部手臂跟骨骼分别复制出来3个园来控制手臂第三个园为了区分我做成四角形的因为我们只用到旋转命令所以我们将用不到的选项锁定并隐藏选择肩部的圆圈在选择手臂骨骼对其进行方向约束选择肘部的圆圈在选择肘部的骨骼对其进行方向约束选择手部的四角形在选择手部的骨骼对其进行方向约束做好约束之后因为有ik控制器所以fk不起作用我们创建一个圆形的控制器将他吸附到肘部关节的位置调整大小向后面移动一段距离清除历史冻结变换为控制器创建一个属性属性的最大值为1最小值为0当最大值为1时受ik控制大控制器的ikfk属性是0时受fk 控制选择ikfk-编辑-设置受驱动关键帧将ikfk设置为驱动者加载将ik设置为受驱动者加载当ikfk等于0时ik混合选项等于0设置关键帧当ikfk等于1时ik混合选项等于1设置关键帧选择肘部的圆形控制器在选择肩部的控制器做一个父子连接选择四角形控制器在选择肘部控制器做一个父子连接这样其他两个控制器就会随着肩部控制器运动选中手指控制手指控制器现在和手的控制器是在一个组里我们选中手指控制器按住shlft+p进行解组重新选择手指控制器然后选择手腕的骨骼将控制器和手腕p到一起我们点击手腕的骨骼发现手腕即受ik控制器的控制又受fk 控制器的控制我们选择手腕下面的ikfk属性选择设置受驱动关键帧一定要选择下面的属性在选择加载受驱动者Nurbs Circle 3w0 这个是ikNurbs Circle 10w1 这个是fk有可能和大家的显示不一样一般上面是ik 下面是fk模型上面的控制器太多我们可以选择ikfk的控制器当ikfk控制器是1的时候让ik控制器显示fk控制器隐藏选择ikfk控制设置驱动关键帧将ikfk加载成驱动者将ik控制器加载为受驱动者当ikfk等于1是ik的可见性为显示设置关键帧当ikfk等于0时ik的可见性等于不显示设置关键帧Fk同样的方法设置设置脊椎控制器首先做出五个园分别代表头部颈椎胸部腰部重心(臀部)控制器将五个控制器吸附到相应的骨骼上选中头部骨骼对其进行方向约束再选中脖子的骨骼将脖子的骨骼p给头部控制器这样头部控制器就是脖子的子物体以此做出前四个的控制器最后一个控制器需要父对象因为他不只有旋转还有移动选择骨骼断开臀部的父子连接编辑菜单最下面shift+p 断开连接我们让上半身控制上半身下半身控制下半身在做一个上半身的控制器选中骨骼选中控制器按p 让控制器控制上半身在选择骨骼控制下半身的控制器同样p上去选择下半身控制器加选上半身控制器按p键进行父子连接现在手臂控制没有跟着运动我们做一个肩部的控制器给他和肩部骨骼做一个方向约束然后将手臂控制器p给肩部再将肩部p给胸部控制器。
Maya角色绑定和动画教1
Maya角色绑定和动画教程(Character Rigging and Animation)本教程通过对一个人物角色的骨骼绑定,以及走路,拉动重物的动画示范过程,让大家能更清晰的认识maya的操作以及项目制作的基本过程,能更快速的掌握maya,更快速的运用到工作中。
现今的软件更新奇快,三维动画的制作软件也在不停的更新换代,但是汉化过来的并不多,部分汉化过来的并不是完全汉化,对我们学习新的软件,帮助不是很有利。
我们要不停的学习新的东西,为了适应新的软件,所以,不能太依赖汉化版本的出现,本教程就是为了让大家尽快熟悉英文软件,所以,本教程只在基础部分做汉语注解,在项目的制作过程中,不过多的做汉语注解,但是会清楚地告诉读者操作过程的每一个步骤,以及每个命令所在的位置,大家不必担心英文不容易理解,只要多操作,多熟悉,英文对我们来说,没有什么关系的。
在很多大公司,要很多人来完成一个项目的时候,软件的版本是有规定的,基本是英文版本,而且是统一插件,统一文件命名规范的,应该全是以英文来命名文件夹,以及项目中所涉及到的需要重新命名的物体,这样是为了能让每个人都能很清楚的来完成项目中自己应该完成的部分,不至于让整个项目混乱,那样项目基本是无法来完成的。
所以我们在学习过程中,应该养成良好的操作习惯,以便在以后的工作中,能更好的融合到团队中去,不要怕麻烦,为了以后工作的效率能更高,更快,我们必须要认真对待每个细节,以免给下步工作带来不必要的麻烦。
在说了英文没什么难的,比起我们的方块字,差远了……!好了,让我们开始学习吧,尽情领略maya在三维动画制作过程中的无穷魅力。
Maya主要窗口Maya的主要窗口,如下图1。
图1 Main menus:主菜单栏。
Status Line:状态栏。
Shelves:搁置栏。
Panel menus:视窗菜单。
Tool Box:工具栏。
Quick layout buttons;快捷布局视窗。
MAYA人体骨骼绑定
人体骨骼绑定1:脚部骨骼绑定1,腿部绑定有两种方式,一种格式创建反转骨骼,一种是控制器打组方式。
反转脚的建立:,首先选择末端关键,再选择脚部IK创建点约束。
要做抬脚动画,选择末端关节,在选择脚部骨骼绑定方向约束,接着选择倒数第二段关节,再选择脚部末端关节,同样加一个方向约束。
打组方式绑定:打组方式要把脚部两个关节也打上IK,用IS。
把脚部IK(1)和脚掌IK (2)打组,如果抬脚跟动作是,脚尖也跟着动,可以进入脚尖IK(3)属性,选粘带。
以脚尖抬脚跟,然后和3打组,把中心放到3上。
同样要做抬脚尖的动作,就把前面的打组,把中心方脚跟关节。
二.脚部控制器的创建一个圆环,调整跟叫差不多,选择反转脚,再选择控制器,按P创建父子连接。
最后把控制器中心放到脚跟。
三.膝盖控制器1,把控制器归零操作。
不能直接清零,要把历史记录删去,再,。
控制腿部的旋转,创建一个文本或则其他图形,调整位置,然后清零(冻结变化),选择控制器,再选择IK在用极向量约束。
,最后为了让腿部控制器跟随脚部运动,选择脚部控制器在选择脚部控制器,按P建立父子连接。
四.为脚步控制建立管理属性(关联控制)。
有两种方法控制属性,一种是连接控制器控制,一种是设置驱动关键帧控制。
1.选择控制器,添加属性,,4,为脚部控制器创建管理属性,在左侧找到刚才添加的属性名称,再右边找到要控制的属性名称,关闭就可以。
2.设驱动关键帧控制属性。
添加属性后,选择控制器,加载驱动者,选翻转脚骨骼3,加载受驱动,选择要驱动的轴向。
可以用一个属性控制几个属性,不可以多个控制一个。
原始打一个关键帧,调关键帧帧数,再调驱动者的运动,再调受驱动者的运动,打关键帧,完成。
2,CTRL+D复制快捷键。
Ctrl+G打组。
五.脊柱骨骼绑定1、,要对某个关节调节,按INSERT键调节。
脊柱绑定操作1.脊柱绑定一般用FK绑定,在脊柱上设置5个控制器,,选着控制器再选择要绑定的关节用方向约束,为了让控制在控制时能跟随运动,选着下一个骨骼在选择控制器,按P键添加一个连接,例如:头部的控制器,就要和颈部的骨骼建立连接。
maya两足角色绑定规范
角色骨骼绑定规范及注意事项一.骨骼命名规范重要骨骼的命名下:1.四肢命名2. 躯干命名二.四肢设置规范1.腿部设置规范腿部IK设置如下:为新建的IK进行打组操作.,选种4个IK.连续打3个组.,如下:三个组分别命名如下:三个组的坐标中心位置如下分别选中图中画圈的IK进行打组:组的坐标中心和命名如下:腿部IK设定完成,下面为了方便K帧,为footcontrol这个腿部控制总组添加属性。
选中leftfootcontrol这个组,打开属性添加面板,如下:为他添加如下属性:打开属性关联面板,如下:将footcontrol这个组导入左边,先将leftankle这个组导入右边,如下:进行如下的属性关联:用同样的方法对footcontrol其他新添加的属性进行关联:Toetip RX==toe rotateX Toetip RY== toe rotateY Toetip RZ== toe rotateZ;Ball RX==ball rotateX toe RX==tip rotateX twist==legikhandle twist腿部设定完成。
2.手部设置规范骨骼绑定好后,先刷权重,权重刷好后进行手部和腿部的设置。
腿部设置如上所述,手部设置的原则是:在大部分时候我们不对手部进行IK设置,直接使用骨骼的FK进行动画K帧。
当我们需要使用IK来实现某些特定动作时,再对手部进行如下的IK设置。
下面是已经蒙好皮的手部骨骼,先建立IK:打开evaluate notes,其位置如下图:点击Ignore All,这时我们可以移动IK的位置到如下的位置(手腕位置):打开outliner,把IK解算器的坐标中心也移到这里:这时可以打开evaluate notes,左键点击evaluate all,这时IK可以正常工作。
选中手腕骨骼,在skeleton中左键点击disconnect joint,如下:选中手腕骨节点,对刚分离下来的手进行点约束;再选中手,对前臂进行X方向的方向约束。
maya人物骨骼绑定
二、骨骼绑定
3、尝试着旋转骨骼,观察蒙 皮的效果。
一、骨骼绘制(续)
9、选择l_arm骨骼,执行 skeleton| mirror skeleton 命令,设置如图。 10、选择l_leg骨骼,执行 skeleton| mirror skeleton 命令,设置如图。
二、骨骼绑定
1、分别将手臂的骨骼p给 chest关节,将腿部的 关节p给root关节。 2、选择root关节(即整 套骨骼的根关节),加 选模型所在的组,执行 skin| bind| smooth bind。(可发现骨骼颜 色发生变化。)
数字角色骨骼的组成
Βιβλιοθήκη 以站立时身体的重心为 界,分为上下两部分。 上部:脊柱,上肢,头 部骨骼; 下部:臀部,腿和脚部 骨骼。
一、绘制骨骼
1、使用joint tool(方向取 xyz)在前视图中绘制 第一节腿部关节(大腿 根) 2、切换至侧视图中,继 续绘制膝盖、脚踝、脚 掌、脚趾头、脚后跟关 节。 注:绘制完脚趾头关节后, 按下上向键,找到脚踝 关节,继续绘制脚后跟。
9-2人物骨骼绑定(一)
骨骼的绘制 2011.9.20
绑定骨骼对模型的要求
1. 2. 3.
4. 5. 6.
模型关于X轴对称 布线合理:关节处至少有三圈线 最佳姿势:卡通角色手臂水平伸平(真实角 色手臂斜向下),手指伸直,双腿分开站立 (或并拢站立),摆成 “大” 字 历史记录删除 无多余的点、线、面 如用插件绑定,模型应置于网格中心。
一、绘制骨骼(续)
5、手臂骨骼的绘制不同 于腿部,选择EP曲线 工具,将其设置改为1 Linear,绘制手臂骨骼 的辅助曲线。如图。 注意:图示所标的3个关 节要保持共线。
一、绘制骨骼(续)
MAYA人体骨骼绑定教学总结
M A Y A人体骨骼绑定人体骨骼绑定1:脚部骨骼绑定1,腿部绑定有两种方式,一种格式创建反转骨骼,一种是控制器打组方式。
反转脚的建立:,首先选择末端关键,再选择脚部IK创建点约束。
要做抬脚动画,选择末端关节,在选择脚部骨骼绑定方向约束,接着选择倒数第二段关节,再选择脚部末端关节,同样加一个方向约束。
打组方式绑定:打组方式要把脚部两个关节也打上IK,用IS。
把脚部IK(1)和脚掌IK (2)打组,如果抬脚跟动作是,脚尖也跟着动,可以进入脚尖IK(3)属性,选粘带。
以脚尖抬脚跟,然后和3打组,把中心放到3上。
同样要做抬脚尖的动作,就把前面的打组,把中心方脚跟关节。
二.脚部控制器的创建一个圆环,调整跟叫差不多,选择反转脚,再选择控制器,按P创建父子连接。
最后把控制器中心放到脚跟。
三.膝盖控制器1,把控制器归零操作。
不能直接清零,要把历史记录删去,再,。
控制腿部的旋转,创建一个文本或则其他图形,调整位置,然后清零(冻结变化),选择控制器,再选择IK在用极向量约束。
,最后为了让腿部控制器跟随脚部运动,选择脚部控制器在选择脚部控制器,按P建立父子连接。
四.为脚步控制建立管理属性(关联控制)。
有两种方法控制属性,一种是连接控制器控制,一种是设置驱动关键帧控制。
1.选择控制器,添加属性,,4,为脚部控制器创建管理属性,在左侧找到刚才添加的属性名称,再右边找到要控制的属性名称,关闭就可以。
2.设驱动关键帧控制属性。
添加属性后,选择控制器,加载驱动者,选翻转脚骨骼3,加载受驱动,选择要驱动的轴向。
可以用一个属性控制几个属性,不可以多个控制一个。
原始打一个关键帧,调关键帧帧数,再调驱动者的运动,再调受驱动者的运动,打关键帧,完成。
2,CTRL+D复制快捷键。
Ctrl+G打组。
五.脊柱骨骼绑定1、,要对某个关节调节,按INSERT键调节。
脊柱绑定操作1.脊柱绑定一般用FK绑定,在脊柱上设置5个控制器,,选着控制器再选择要绑定的关节用方向约束,为了让控制在控制时能跟随运动,选着下一个骨骼在选择控制器,按P键添加一个连接,例如:头部的控制器,就要和颈部的骨骼建立连接。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Maya人物绑定方法教程——腿部绑定人物骨骼已建好(略,详见骨骼制作方法)
一、创建腿部绑定
步骤1:
执行Skeleton>IK Handle Tool。
依次创建3个IK控制器。
IK Handle1,
IK Handle2,IK Handle3如图。
接下来几个IK分别打组,以组的形式控制
人物脚部的动作
处,这个组控制脚尖抬起的运动。
如图:
踝骨节处,这个组控制脚踝的X轴旋转运动(即以脚踝为中心上下旋转脚部)。
如图:
选择IKHandle1自身成组Group3,调整中心点,按住D和V,吸附到脚掌骨节处,这个组控制以脚掌为中心脚后跟抬起的运动。
如图:
选择Group2和Group3成组Group4,调整中心点,按住D和V,吸附到脚尖骨节处,这个组控制以脚尖为旋转原点抬起脚掌的运动。
如图:
选择Group4自身成组Group5,调整中心点,按住D和V,吸附到脚踝骨节处,这个组控制脚踝的Y轴旋转运动(即以脚踝为中心左右旋转脚部)。
如图:
组的层级关系如图。
步骤2:
创建控制器,命名为Foot_L。
移动到脚底,完成定位后,执行Modify>Freeze Transformations命令,将控制器参数归零,Edit>Delete by type>History.删除历史记录; Modify>Center Pivot轴心点移到模型中间。
如图:
在Outliner中,将Group5用中键拖入Foot_L,将IK的总组作为控制器的子物体。
如图:
为Foot_L添加属性,选择Modify>Add Attribute,添加Long name为R1、R2、R3、R4、R5等属性。
如图:
选中控制器Foot_L,通道栏属性如图:
为控制器Foot_L属性连接骨骼动作(组)
打开window>General Editors>Connection Editor
选中控制器Foot_L,在Connection Editor中点击Reload Left,在Outliner中选中Group1,点击Reload Right,如图:
左面选择R1,右面选择rotate下的rotatex,如图,字体成斜体,并且通道栏内的Rotate X属性值为黄色显示表示已连接。
同理制作
R2 对应Group2的Rotatex
R3 对应Group3的Rotatex
R4 对应Group4的Rotatex
R5 对应Group5的Rotatey
至此,脚部控制器Foot_L属性R1到R5制作完毕,能够分别完成如下功能。
R1 控制脚尖抬起的运动
R2 控制脚踝的X轴旋转运动
R3 控制以脚掌为中心脚后跟抬起的运动
R4 控制以脚尖为旋转原点抬起脚掌的运动
R5 控制脚踝的Y轴旋转运动
步骤3 创建腿部极向量约束的控制
制作一个控制器,名称Foot_L_PV,形状如图(可自行设计制作):
放置于左腿膝盖的正前方,完成定位后,执行Modify>Freeze Transformations命令,将控制器参数归零,Edit>Delete by type>History.删除历史记录。
选中控制器Foot_L_PV,再选中IKHandle1,执行Constrain>Pole Vector为腿部IK创建极向量约束。
将Foot_L_PV在Outliner中,用中键拖入Foot_L,完成左腿绑定。
步骤4,同理步骤1-3制作右腿绑定。