内点法matlab仿真doc资料
MATLAB仿真技术
MATLAB仿真技术作业合集页脚内容1页脚内容1第1章 习题5.利用直接输入法和矩阵编辑器创建矩阵A=⎥⎦⎤⎢⎣⎡642531。
解:⑴利用直接输入法输入程序A=[1 3 5;2 4 6]按Enter 键后,屏幕显示A = 1 3 52 4 6⑵用矩阵编辑器创建矩阵,如图1.1所示。
图1.1 MATLAB 编辑器7.用矩阵编辑器创建矩阵a,使a 具有如下矩阵形式。
页脚内容2a=⎥⎦⎤⎢⎣⎡642531⇒a=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡654321⇒a=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡987654321⇒a=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡098706540321⇒a=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡0000098706540321 解:用矩阵编辑器创建矩阵a 的过程如图1.2、1.3、1.4、1.5、1.6所示。
图1.2 图1.3图1.4 图1.5图1.6页脚内容39.已知矩阵B=⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡922518113211912102201304161475231501017,试:①提取矩阵B 的第一行和第二行的第2、4、5个元素组成新矩阵1B ;②提取矩阵B 的第三行和第一行的全部元素组成新矩阵2B ;③使矩阵B 的第一行和第三行的第2;4个元素为0;④标出矩阵B 的第一行中小于5的元素。
解:①如上题,用矩阵编辑器生成矩阵B ,再输入程序B1=B([1,2],[2,4,5])按Enter 键后,屏幕显示B1 = 0 0 155 14 16②输入程序B2=B([1,3],:)按Enter 键后,屏幕显示B2 = 17 0 1 0 15 4 0 13 0 22③第一行和第三行的第2;4个元素原本就为0。
④输入程序如下C=B(1,:)<5; %将B矩阵第一行中小于5 的值标记为1D=B(1,C) %去B矩阵第一行中标为1的元素按Enter键后,屏幕显示D= 0 1 011.已知矩阵a为4阶魔方阵,令a+3赋值给b,a+b赋值给c,求b和c。
MATLAB仿真教程

MATLAB仿真教程一、MATLAB的基本操作1.启动MATLAB:在桌面上双击MATLAB图标,即可启动MATLAB软件。
3.基本运算:在命令窗口中输入基本运算表达式,如加减乘除,然后按下回车键即可得到结果。
4.变量的定义和操作:在MATLAB中,可以定义变量,并对其进行各种运算操作。
例如,定义一个变量a,并对其进行加法运算,如a=2+35.矩阵操作:MATLAB中的矩阵操作非常方便。
可以使用矩阵运算符进行矩阵的相加、相乘等操作。
6. 绘图功能:MATLAB提供了丰富的绘图功能,可以绘制曲线、散点图、三维图等。
通过plot函数可以绘制曲线,scatter函数绘制散点图,surf函数绘制三维图。
二、MATLAB的仿真研究1.数值计算:MATLAB可以进行各种数值计算,如解线性方程组、求解微分方程、进行最优化等。
通过编写相应的代码,调用MATLAB提供的函数库,可以实现这些仿真研究。
2.信号处理:MATLAB提供了丰富的信号处理工具箱,可以进行信号的滤波、谱分析、频谱绘制等操作。
通过调用相应的函数库,可以实现这些功能。
3.控制系统仿真:MATLAB提供了强大的控制系统工具箱,可以进行控制系统的建模、仿真和优化。
可以使用MATLAB的控制系统工具箱进行系统的响应、稳定性分析和控制器设计。
4.图像处理与计算机视觉:MATLAB可以进行基本的图像处理操作,如图像的灰度化、二值化、滤波、边缘检测等。
通过调用MATLAB的计算机视觉工具箱,还可以进行目标检测、图像识别等高级图像处理操作。
5.多体动力学仿真:MATLAB提供了多体动力学仿真工具箱,可以进行机械系统的建模、动力学仿真和分析。
可以通过编写相应的代码,定义机械系统的运动方程和控制方程,实现仿真研究。
总结:MATLAB是一种强大的数值计算和编程软件,广泛应用于科学、工程、金融等领域。
本教程介绍了MATLAB的基本操作以及如何进行仿真研究。
通过学习MATLAB,可以提高数值计算和仿真研究的效率,为科研工作提供有力的支持。
内点法最优潮流MATLAB算法
内点法最优潮流MATLAB算法clear;%clc;%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%初始化%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%数据加载n=input('请输入要计算的节点系统(5):')load Node5.txt;%节点数据load Branch5.txt;%支路数据load Generator5.txt;%发电机数据Node=Node5;Branch=Branch5;Generator=Generator5;%节点数据处理N=Node(:,1);%节点号Type=Node(:,2);%节点类型Uamp=Node(:,3);%节点电压幅值Dlta=Node(:,4);%节点电压相角Pd=Node(:,5);%节点负荷有功Qd=Node(:,6);%节点负荷无功Pg=Node(:,7);%节点出力有功Qg=Node(:,8);%节点出力无功Umax=Node(:,9);%节点电压幅值上限 Umin=Node(:,10);%节点电压幅值下限Bc=Node(:,11);%节点补偿电容电纳值 %支路数据处理Nbr=Branch(:,1);%支路号Nl=Branch(:,2);%支路首节点Nr=Branch(:,3);%支路末节点R=Branch(:,4);%支路电阻X=Branch(:,5);%支路电抗Z=R+1i*X;%支路阻抗=支路电阻+支路电抗 Bn=Branch(:,6);%支路对地电纳K=Branch(:,7);%支路变压器变比,0表示无变压器 Ptmax=Branch(:,8);%线路传输功率上限%发电机数据处理Ng=Generator(:,1);%发电机序号Nbus=Generator(:,2);%所在母线号Pumax=Generator(:,3);%发电机有功出力上界 Qumax=Generator(:,4);%发电机无功出力上界 Pumin=Generator(:,5);%发电机有功出力下界Qumin=Generator(:,6);%发电机无功出力下界a2=Generator(:,7);%燃料耗费曲线二次系数a1=Generator(:,8);%燃料耗费曲线一次系数a0=Generator(:,9);%燃料耗费曲线常数项%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%n=length(N);%节点个数ng=length(Ng);%发电机台数nbr=length(Nbr);%支路个数x=zeros(2*(ng+n),1);%控制变量+状态变量x(1:ng)=Pg(Nbus);x(ng+1:2*ng)=Qg(Nbus);x((2*ng+2):2:2*(ng+n))=Uamp; x((2*ng+1):2:2*(ng+n)-1)=Dlta; l=0.8*ones(2*ng+n+nbr,1);%松弛变量u=1.1*ones(2*ng+n+nbr,1);%松弛变量w=-1.5*ones(2*ng+n+nbr,1);%拉格朗日乘子z=ones(2*ng+n+nbr,1);%拉格朗日乘子y=zeros(2*n,1);%拉格朗日乘子y(1:2:2*n-1)=1e-3;y(2:2:2*n)=-1e-3;%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%计算不等式约束的上下限%%%%%%%%%%%%%%%%%%%%%%%%%gmingmin=zeros(2*ng+n+nbr,1);gmin(1:ng)=Pumin;gmin(ng+1:2*ng)=Qumin;gmin(2*ng+1:2*ng+n)=Umin;gmin(2*ng+n+1:2*ng+n+nbr)=-Ptmax; %gmaxgmax=zeros(2*ng+n+nbr,1);gmax(1:ng)=Pumax;gmax(ng+1:2*ng)=Qumax;gmax(2*ng+1:2*ng+n)=Umax;gmax(2*ng+n+1:2*ng+n+nbr)=Ptmax;%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%形成导纳矩阵%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%Y=zeros(n,n);%%%%%%%%%%%%%%%%%%%%计算非对角元素%%%%%%%%%%%%%%%%%%%%% for ii=1:nbr if K(ii)==0%非变压器支路Y(Nl(ii),Nr(ii))=-1/Z(ii);Y(Nr(ii),Nl(ii))=Y(Nl(ii),Nr(ii));else%变压器支路Y(Nl(ii),Nr(ii))=-1/Z(ii)/K(ii);Y(Nr(ii),Nl(ii))= Y(Nl(ii),Nr(ii));endend%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%计算对角元素%%%%%%%%%%%%%%%%%%%%%%for ii=1:n%将支路导纳加入到对角元素中for jj=1:nbrif K(jj)==0&&(Nl(jj)==ii||Nr(jj)==ii)%非变压器支路Y(ii,ii)=Y(ii,ii)+1/Z(jj);else if K(jj)~=0&&(Nl(jj)==ii||Nr(jj)==ii)%变压器支路Y(ii,ii)=Y(ii,ii)+1/Z(jj)/K(jj);endendendendfor ii=1:nbr%将对地电纳加入到对角元素中if K(ii)==0%非变压器支路Y(Nl(ii),Nl(ii))=Y(Nl(ii),Nl(ii))+1i*Bn(ii);Y(Nr(ii),Nr(ii))=Y(Nr(ii),Nr(ii))+1i*Bn(ii);else%变压器支路Y(Nr(ii),Nr(ii))=Y(Nr(ii),Nr(ii))+(K(ii)-1)/K(ii)/Z(ii);Y(Nl(ii),Nl(ii))=Y(Nl(ii),Nl(ii))+(1-K(ii))/K(ii)/K(ii)/Z(ii);endendfor ii=1:nY(ii,ii)=Y(ii,ii)+i*Bc(ii);endG=real(Y);%电导B=imag(Y);%电纳%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%k=0;%迭代次数Kmax=150;%最大迭代次数iteration=1e-4;%误差精度delta=0.08;Gap=(l'*z-u'*w)*ones(Kmax,1);%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%主程序%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% while k<50%计算互补间隙GapGap(k+1)=l'*z-u'*w;if Gap>iterationmiu=delta*Gap(k+1)/(2*(2*ng+n+nbr)); %%%%%%%%%%%%%%%%%%%%%%%%%%%%形成系数矩阵%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%相角差计算%%%%%%%%%%%%%%%%%%%%%%theta=zeros(n,n);for ii=1:nfor jj=1:ntheta(ii,jj)=Dlta(ii)-Dlta(jj);endend %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%1、等式约束雅克比矩阵%%%%%%%%%%%%%%%%pxh=zeros(2*(ng+n),2*n); %%%%%%%%%%%%%%%%%%%%%%%ah/aP%%%%%%%%%%%%%%%%%%%%%%%for ii=1:ngpxh(Ng(ii),2*Nbus(ii)-1)=1;end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%ah/aQ%%%%%%%%%%%%%%%%%%%%%%%for ii=1:ngpxh(Ng(ii)+ng,2*Nbus(ii))=1;end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%ah/ax%%%%%%%%%%%%%%%%%%%%%%%HH=zeros(n,n);JJ=zeros(n,n);NN=zeros(n,n);LL=zeros(n,n);for ii=1:nfor jj=1:nif ii~=jj%i!=j时的情况%非对角元素HH(ii,jj)=-Uamp(ii)*Uamp(jj)*(G(ii,jj)*sin(theta(ii,jj))-B(ii,jj)*cos(theta(ii,jj)));JJ(ii,jj)=Uamp(ii)*Uamp(jj)*(G(ii,jj)*cos(theta(ii,jj))+B(ii,jj)*sin (theta(ii,jj)));NN(ii,jj)=-Uamp(ii)*(G(ii,jj)*cos(theta(ii,jj))+B(ii,jj)*sin(theta(ii,jj)));LL(ii,jj)=-Uamp(ii)*(G(ii,jj)*sin(theta(ii,jj))-B(ii,jj)*cos(theta(ii,jj)));%对角元素HH(ii,ii)=HH(ii,ii)+Uamp(ii)*Uamp(jj)*(G(ii,jj)*sin(theta(ii,jj))-B(ii,jj)*cos(theta(ii,jj)));JJ(ii,ii)=JJ(ii,ii)-Uamp(ii)*Uamp(jj)*(G(ii,jj)*cos(theta(ii,jj))+B(ii,jj)*sin(theta(ii,jj)) );NN(ii,ii)=NN(ii,ii)-Uamp(jj)*(G(ii,jj)*cos(theta(ii,jj))+B(ii,jj)*sin(theta(ii,jj)));LL(ii,ii)=LL(ii,ii)-Uamp(jj)*(G(ii,jj)*sin(theta(ii,jj))-B(ii,jj)*cos(theta(ii,jj)));endendNN(ii,ii)=NN(ii,ii)-2*Uamp(ii)*G(ii,ii);LL(ii,ii)=LL(ii,ii)+2*Uamp(ii)*B(ii,ii);endpxh(1+2*ng:2:2*(n+ng)-1,1:2:2*n-1)=HH';pxh(1+2*ng:2:2*(n+ng)-1,2:2:2*n)=JJ';pxh(2+2*ng:2:2*(n+ng),1:2:2*n-1)=NN';pxh(2+2*ng:2:2*(n+ng),2:2:2*n)=LL';%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%2、不等式约束的雅克比矩阵%%%%%%%%%%%%%%%%%%%% %g1:电源有功出力上下限约束ag1aP=eye(ng,ng);ag1aQ=zeros(ng,ng);ag1ax=zeros(2*n,ng);%g2:电源无功出力上下限约束ag2aP=zeros(ng,ng);ag2aQ=eye(ng,ng);ag2ax=zeros(2*n,ng);%g3:节点电压幅值上下限约束ag3aP=zeros(ng,n);ag3aQ=zeros(ng,n);ag3ax=zeros(2*n,n);for ii=1:nag3ax(2*ii,ii)=1;end%g4:线路潮流上下限约束ag4aP=zeros(ng,nbr);ag4aQ=zeros(ng,nbr);ag4ax=zeros(2*n,nbr);for ii=1:nfor jj=1:nbrif Nl(jj)==iiag4ax(2*ii-1,jj)=-Uamp(Nl(jj))*Uamp(Nr(jj))*(G(Nl(jj),Nr(jj))*sin(theta(Nl(jj),N r(jj)))-B(Nl(jj),Nr(jj))*cos(theta(Nl(jj),Nr(jj))));ag4ax(2*ii,jj)=Uamp(Nr(jj))*(G(Nl(jj),Nr(jj))*cos(theta(Nl(jj),Nr(jj )))+B(Nl(jj),Nr(jj))*sin(theta(Nl(jj),Nr(jj))))-2*Uamp(Nl(jj))*G(Nl(jj),Nr(jj));endif Nr(jj)==iiag4ax(2*ii-1,jj)=Uamp(Nl(jj))*Uamp(Nr(jj))*(G(Nl(jj),Nr(jj))*sin(theta(Nl(jj),Nr (jj)))-B(Nl(jj),Nr(jj))*cos(theta(Nl(jj),Nr(jj))));ag4ax(2*ii,jj)=Uamp(Nl(jj))*(G(Nl(jj),Nr(jj))*cos(theta(Nl(jj),Nr(jj )))+B(Nl(jj),Nr(jj))*sin(theta(Nl(jj),Nr(jj))));endendendpxg=[ag1aP ag2aP ag3aP ag4aP;ag1aQ ag2aQ ag3aQ ag4aQ;ag1ax ag2ax ag3ax ag4ax];%此即为不等式约束的雅克比矩阵%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%3、对角矩阵%%%%%%%%%%%%%%%%%%%%%%%% L_1Z=zeros(2*ng+n+nbr,2*ng+n+nbr);U_1W=zeros(2*ng+n+nbr,2*ng+n+nbr);for ii=1:2*ng+n+nbrL_1Z(ii,ii)=z(ii)/l(ii);U_1W(ii,ii)=w(ii)/u(ii);end%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%海森伯矩阵%%%%%%%%%%%%%%%%%%%%%%%%%% %将海森伯矩阵分为4块:H1,H2,H3,H4%%%%%%%%%%%%%%%%%%%%%H1%%%%%%%%%%%%%%%%%%%%%%A2=diag(a2);H1=zeros(2*(ng+n),2*(ng+n));H1(1:ng,1:ng)=2*A2;%%%%%%%%%%%%%%%%%%%%H2%%%%%%%%%%%%%%%%%%%%%%H2=zeros(2*(ng+n),2*(ng+n));A=zeros(2*n,2*n);Apb=zeros(2*n,2*n,n);Aqb=zeros(2*n,2*n,n);for ii=1:nfor jj=1:n %元素位置为:1 2if ii~=jj % 3 4%对角线上与ii对应的元素%ApApb(2*ii-1,2*ii-1,ii)=Apb(2*ii-1,2*ii-1,ii)+Uamp(ii)*Uamp(jj)*(G(ii,jj)*cos(theta(ii,jj))+B(ii,jj)*sin(theta(i i,jj)));%对角线处1号元素Apb(2*ii-1,2*ii,ii)=Apb(2*ii-1,2*ii,ii)+Uamp(jj)*(G(ii,jj)*sin(theta(ii,jj))-B(ii,jj)*cos(theta(ii,jj)));%对角线处2号元素%%3号元素与之相等%AqAqb(2*ii-1,2*ii-1,ii)=Aqb(2*ii-1,2*ii-1,ii)+Uamp(ii)*Uamp(jj)*(G(ii,jj)*sin(theta(ii,jj))-B(ii,jj)*cos(theta(ii,jj)));%对角线处1号元素Aqb(2*ii-1,2*ii,ii)=Aqb(2*ii-1,2*ii,ii)-Uamp(jj)*(G(ii,jj)*cos(theta(ii,jj))+B(ii,jj)*sin(theta(ii,jj)));%对角线处2号元素%%3号元素与之相等%对角线上与jj对应的元素%ApApb(2*jj-1,2*jj-1,ii)=Uamp(ii)*Uamp(jj)*(G(ii,jj)*cos(theta(ii,jj))+B(ii,jj)*sin(theta(i i,jj)));%对角线处1号元素Apb(2*jj-1,2*jj,ii)=-Uamp(ii)*(G(ii,jj)*sin(theta(ii,jj))-B(ii,jj)*cos(theta(ii,jj))); %对角线处2号元素Apb(2*jj,2*jj-1,ii)=Apb(2*jj-1,2*jj,ii);%3号元素与2号元素相等%AqAqb(2*jj-1,2*jj-1,ii)=Uamp(ii)*Uamp(jj)*(G(ii,jj)*sin(theta(ii,jj))-B(ii,jj)*cos(theta(ii,jj)));%对角线处1号元素Aqb(2*jj-1,2*jj,ii)=Uamp(ii)*(G(ii,jj)*cos(theta(ii,jj))+B(ii,jj)*sin(theta(ii,jj ))); %对角线处2号元素Aqb(2*jj,2*jj-1,ii)=Aqb(2*jj-1,2*jj,ii);%3号元素与2号元素相等%4号元素为0%非对角线行元素%ApApb(2*ii-1,2*jj-1,ii)=-Uamp(ii)*Uamp(jj)*(G(ii,jj)*cos(theta(ii,jj))+B(ii,jj)*sin(theta(ii,jj)) );%非对角线行处1号元素Apb(2*ii-1,2*jj,ii)=Uamp(ii)*(G(ii,jj)*sin(theta(ii,jj))-B(ii,jj)*cos(theta(ii,jj)));%非对角线行处2号元素Apb(2*ii,2*jj-1,ii)=-Uamp(jj)*(G(ii,jj)*sin(theta(ii,jj))-B(ii,jj)*cos(theta(ii,jj)));%非对角线行处3号元素Apb(2*ii,2*jj,ii)=-(G(ii,jj)*cos(theta(ii,jj))+B(ii,jj)*sin(theta(ii,jj)));%非对角线行处4号元素%AqAqb(2*ii-1,2*jj-1,ii)=-Uamp(ii)*Uamp(jj)*(G(ii,jj)*sin(theta(ii,jj))-B(ii,jj)*cos(theta(ii,jj)));%非对角线行处1号元素Aqb(2*ii-1,2*jj,ii)=-Uamp(ii)*(G(ii,jj)*cos(theta(ii,jj))+B(ii,jj)*sin(theta(ii,jj)));%非对角线行处2号元素Aqb(2*ii,2*jj-1,ii)=Uamp(jj)*(G(ii,jj)*cos(theta(ii,jj))+B(ii,jj)*sin(theta(ii,jj)));%非对角线行处3号元素Aqb(2*ii,2*jj,ii)=-(G(ii,jj)*sin(theta(ii,jj))-B(ii,jj)*cos(theta(ii,jj)));%非对角线行处4号元素%非对角线列元素%ApApb(2*jj-1,2*ii-1,ii)=Apb(2*ii-1,2*jj-1,ii);%非对角线列处1号元素Apb(2*jj-1,2*ii,ii)=Apb(2*ii,2*jj-1,ii);%非对角线列处2号元素Apb(2*jj,2*ii-1,ii)=Apb(2*ii-1,2*jj,ii);%非对角线列处3号元素Apb(2*jj,2*ii,ii)=Apb(2*ii,2*jj,ii);%%非对角线列处4号元素%AqAqb(2*jj-1,2*ii-1,ii)=Aqb(2*ii-1,2*jj-1,ii);%非对角线列处1号元素Aqb(2*jj-1,2*ii,ii)=Aqb(2*ii,2*jj-1,ii);%非对角线列处2号元素Aqb(2*jj,2*ii-1,ii)=Aqb(2*ii-1,2*jj,ii);%非对角线列处3号元素Aqb(2*jj,2*ii,ii)=Aqb(2*ii,2*jj,ii);%%非对角线列处4号元素endend%对角线上与ii对应的元素%ApApb(2*ii,2*ii-1,ii)=Apb(2*ii-1,2*ii,ii);%对角线处3号元素与2号元素相等Apb(2*ii,2*ii,ii)=-2*G(ii,ii);%对角线处4号元素%AqAqb(2*ii,2*ii-1,ii)=Aqb(2*ii-1,2*ii,ii);%对角线处3号元素与2号元素相等Aqb(2*ii,2*ii,ii)=2*B(ii,ii);%对角线处4号元素endfor ii=1:nA=A+Apb(:,:,ii)*y(2*ii-1)+Aqb(:,:,ii)*y(2*ii);endH2(2*ng+1:2*(ng+n),2*ng+1:2*(ng+n))=A;%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%H3%%%%%%%%%%%%%%%%%%%%%%H3=zeros(2*(ng+n),2*(ng+n));A3=zeros(2*n,2*n);Apc=zeros(2*n,2*n,nbr);for ii=1:nbr%对角线上iiApc(2*Nl(ii)-1,2*Nl(ii)-1,ii)=-Uamp(Nl(ii))*Uamp(Nr(ii))*(G(Nl(ii),Nr(ii))*cos(theta(Nl(ii),Nr(ii)))+B( Nl(ii),Nr(ii))*sin(theta(Nl(ii),Nr(ii))));Apc(2*Nl(ii)-1,2*Nl(ii),ii)=-Uamp(Nr(ii))*(G(Nl(ii),Nr(ii))*sin(theta(Nl(ii),Nr(ii)))-B(Nl(ii),Nr(ii))*cos(theta(Nl(ii),Nr(ii))));Apc(2*Nl(ii),2*Nl(ii)-1,ii)=Apc(2*Nl(ii)-1,2*Nl(ii),ii);Apc(2*Nl(ii),2*Nl(ii),ii)=-2*G(Nl(ii),Nr(ii));%对角线上jjApc(2*Nr(ii)-1,2*Nr(ii)-1,ii)=-Uamp(Nl(ii))*Uamp(Nr(ii))*(G(Nl(ii),Nr(ii))*cos(theta(Nl(ii),Nr(ii)))+B( Nl(ii),Nr(ii))*sin(theta(Nl(ii),Nr(ii))));Apc(2*Nr(ii)-1,2*Nr(ii),ii)=Uamp(Nl(ii))*(G(Nl(ii),Nr(ii))*sin(theta(Nl(ii),Nr(ii)))-B(Nl(ii),Nr(ii))*cos(theta(Nl(ii),Nr(ii))));Apc(2*Nr(ii),2*Nr(ii)-1,ii)=Apc(2*Nr(ii)-1,2*Nr(ii),ii);Apc(2*Nr(ii),2*Nr(ii),ii)=0;%非对角线ijApc(2*Nl(ii)-1,2*Nr(ii)-1,ii)=Uamp(Nl(ii))*Uamp(Nr(ii))*(G(Nl(ii),Nr(ii))*cos(theta(Nl(ii),Nr(ii )))+B(Nl(ii),Nr(ii))*sin(theta(Nl(ii),Nr(ii))));Apc(2*Nl(ii)-1,2*Nr(ii),ii)=-Uamp(Nl(ii))*(G(Nl(ii),Nr(ii))*sin(theta(Nl(ii),Nr(ii)))-B(Nl(ii),Nr(ii))*cos(theta(Nl(ii),Nr(ii))));Apc(2*Nl(ii),2*Nr(ii)-1,ii)=Uamp(Nr(ii))*(G(Nl(ii),Nr(ii))*sin(theta(Nl(ii),Nr(ii)))-B(Nl(ii),Nr(ii))*cos(theta(Nl(ii),Nr(ii))));Apc(2*Nl(ii),2*Nr(ii),ii)=G(Nl(ii),Nr(ii))*cos(theta(Nl(ii),Nr(ii))) +B(Nl(ii),Nr(ii))*sin(theta(Nl(ii),Nr(ii)));%非对角线jiApc(2*Nr(ii)-1,2*Nl(ii)-1,ii)=Apc(2*Nl(ii)-1,2*Nr(ii)-1,ii);Apc(2*Nr(ii)-1,2*Nl(ii),ii)=Apc(2*Nl(ii),2*Nr(ii)-1,ii);Apc(2*Nr(ii),2*Nl(ii)-1,ii)=Apc(2*Nl(ii)-1,2*Nr(ii),ii);Apc(2*Nr(ii),2*Nl(ii),ii)=Apc(2*Nl(ii),2*Nr(ii),ii);%求和c=z+w;A3=A3+Apc(:,:,ii)*c(2*ng+n+ii);endH3(2*ng+1:2*(ng+n),2*ng+1:2*(ng+n))=A3;%%%%%%%%%%%%%%%%%%%%%%%H4%%%%%%%%%%%%%%%%%%%%%%%%%H4=pxg*(L_1Z-U_1W)*pxg';%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%H=-H1+H2+H3-H4;%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%形成常数项%%%%%%%%%%%%%%%%%%%%%%%%% %Lyh=zeros(2*n,1);for ii=1:nh(2*ii-1)=Pg(ii)-Pd(ii);h(2*ii)=Qg(ii)-Qd(ii);for jj=1:nh(2*ii-1)=h(2*ii-1)-Uamp(ii)*Uamp(jj)*(G(ii,jj)*cos(theta(ii,jj))+B(ii,jj)*sin(t heta(ii,jj)));h(2*ii)=h(2*ii)-Uamp(ii)*Uamp(jj)*(G(ii,jj)*sin(theta(ii,jj))-B(ii,jj)*cos(theta(ii,jj)));endendLy=h;%Lz%g(x)gx=zeros(2*ng+n+nbr,1);gx(1:ng)=x(1:ng);gx(ng+1:2*ng)=x(ng+1:2*ng);gx(2*ng+1:2*ng+n)=x(2*ng+2:2:2*(ng+n));for ii=1:nbrgx(2*ng+n+ii)=Uamp(Nl(ii))*Uamp(Nr(ii))*(G(Nl(ii),Nr(ii))*cos(theta( Nl(ii),Nr(ii)))+B(Nl(ii),Nr(ii))*sin(theta(Nl(ii),Nr(ii))))-Uamp(Nl(ii))*Uamp(Nl(ii))*G(Nl(ii),Nr(ii));endLz=gx-l-gmin;%LwLw=gx+u-gmax;%Lle=ones(2*ng+n+nbr,1);LZ=zeros(2*ng+n+nbr,2*ng+n+nbr);for ii=1:2*ng+n+nbr;LZ(ii,ii)=l(ii)*z(ii);endLl=LZ*e-miu*e;%LuUW=zeros(2*ng+n+nbr,2*ng+n+nbr);for ii=1:2*ng+n+nbrUW(ii,ii)=u(ii)*w(ii);endLu=UW*e+miu*e;%Lx'Lx1=zeros(2*(ng+n),1);Lx1(1:ng)=2*a2.*x(1:ng)+a1;Lx2=pxh*y;Lx3=pxg*c;Lx41=zeros(2*(ng+n),1);Lx42=zeros(2*(ng+n),1);for ii=1:2*ng+n+nbrLx41(ii)=(Ll(ii)+z(ii)*Lz(ii))/l(ii);Lx42(ii)=(Lu(ii)-w(ii)*Lw(ii))/u(ii);endLx4=pxg*(Lx41+Lx42);Lx=Lx1-Lx2-Lx3;Lxx=Lx+Lx4; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%求出修正量%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %dx,dyHxy=[H pxh;pxh' zeros(2*n,2*n)];LxLy=[Lxx;-Ly];I=eye(2*(ng+n)+2*n);dxdy=I/Hxy*LxLy;dx=dxdy(1:2*(ng+n));dy=dxdy(2*(ng+n)+1:2*(ng+n)+2*n);%dldl=pxg'*dx+Lz;%dudu=-pxg'*dx-Lw;%dzdz=zeros(2*ng+n+nbr,1);for ii=1:2*ng+n+nbrdz(ii)=(-Ll(ii)-z(ii)*dl(ii))/l(ii);end%dwdw=zeros(2*ng+n+nbr,1);for ii=1:2*ng+n+nbrdw(ii)=(-Lu(ii)-w(ii)*du(ii))/u(ii);end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%计算alfap和alfad%%%%%%%%%%%%%%%%%%%%%%%% alfap=1;alfad=1;for ii=1:2*ng+n+nbrif dl(ii)<0&&-l(ii)/dl(ii)<alfapalfap=-l(ii)/dl(ii);endif du(ii)<0&&-u(ii)/du(ii)<alfapalfap=-u(ii)/du(ii);endif dz(ii)<0&&-z(ii)/dz(ii)<alfadalfad=-z(ii)/dz(ii);endif dw(ii)>0&&-w(ii)/dw(ii)<alfadalfad=-w(ii)/dw(ii);endendalfap=0.9995*alfap;alfad=0.9995*alfad;x=x+alfap*dx;l=l+alfap*dl;u=u+alfap*du;y=y+alfad*dy;z=z+alfad*dz;w=w+alfad*dw;%迭代功率、电压幅值和相角for ii=1:ngPg(Nbus(ii))=x(ii);Qg(Nbus(ii))=x(ng+ii);endfor ii=1:nUamp(ii)=x(2*(ng+ii));Dlta(ii)=x(2*(ng+ii)-1);end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% k=k+1;elsebreak;endendfcost=0;for ii=1:ngfcost=fcost+a2(ii)*Pg(Nbus(ii))*Pg(Nbus(ii))+a1(ii)*Pg(Nbus(ii))+a0( ii);endfcostkplot(0:k,Gap(1:k+1),':*');PgQgUampfor ii=1:nif Type(ii)==3Dlta=Dlta-Dlta(ii)*ones(n,1);endendDlta。
matlab(仿真法)具体讲解
执行下面的命令:ode23(‘zjwt',[3,0.0005],0)
若想看图中点的坐标可执行下面的命令: [t,y]=ode23(‘zjwt',[3,0.0005],0) plot(t,y) 此时缉私艇的位置坐标是(0.00050000000000,1.96013657712118) 执行下面的命令: ode45(‘zjwt',[3,0.0005],0) 若想看图中点的坐标可执行下面的命令: [t,y]=ode45(‘zjwt',[3,0.0005],0) plot(t,y) 此时缉私艇的位置坐标是(0.0005,1.9675 )
例3
求微分方程组的通解. dx dt 2 x 3 y 3z dy 4 x 5 y 3z dt dz 4 x 4 y 2 z dt
解 输入命令 : [x,y,z]=dsolve('Dx=2*x-3*y+3*z','Dy=4*x5*y+3*z','Dz=4*x-4*y+2*z', 't'); x=simple(x) % 将x化简 y=simple(y) z=simple(z) 结 果 为:x = (c1-c2+c3+c2e -3t-c3e-3t)e2t y = -c1e-4t+c2e-4t+c2e-3t-c3e-3t+c1-c2+c3)e2t z = (-c1e-4t+c2e-4t+c1-c2+c3)e2t
例 29y 0 dx dx y (0) 0, y ' (0) 15
解 输入命令: y=dsolve('D2y+4*Dy+29*y=0','y(0)=0,Dy(0)=15','x') 结 果 为 : y =3e-2xsin(5x)
内点法
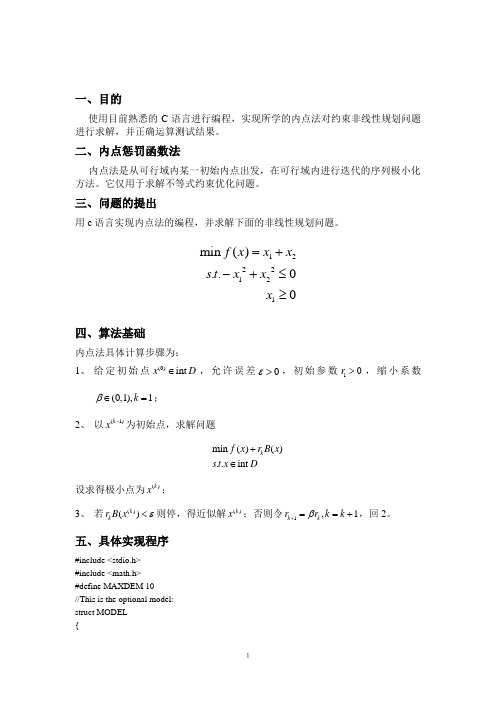
一、目的使用目前熟悉的C 语言进行编程,实现所学的内点法对约束非线性规划问题进行求解,并正确运算测试结果。
二、内点惩罚函数法内点法是从可行域内某一初始内点出发,在可行域内进行迭代的序列极小化方法。
它仅用于求解不等式约束优化问题。
三、问题的提出用c 语言实现内点法的编程,并求解下面的非线性规划问题。
1222121min ()..0f x x x s t x x x =+-+≤≥四、算法基础内点法具体计算步骤为:1、 给定初始点(0)i n t x D ∈,允许误差0ε>,初始参数10r >,缩小系数(0,1),1k β∈=;2、 以(1)k x -为初始点,求解问题min ()()..int k f x r B x s t x D +∈设求得极小点为()k x ;3、 若()()k k r B x ε<则停,得近似解()k x ;否则令1,1k k r r k k β+==+,回2。
五、具体实现程序#include <stdio.h>#include <math.h>#define MAXDEM 10//This is the optional model:struct MODEL{double (*g[10])(double *); //The object functiondouble (*f)(double *); //The subject functions,the max number is 10int stNum; //The number of subject functions} Model;//******A example to get the optional value of function x1+x2double f(double x[]){return x[0]*x[0]+x[1]*x[1];}//****下面的三个函数是不等式约束函数,要求约束函数>0double g1(double x[]){return 0; //-x1*x1+x2>0}double g2(double x[]){return x[0]-1; //x1>0}//*****The function created for this methoddouble fun(double x[],double r){int i;double (*g)(double *);double ret=0;for(i=0;i<Model.stNum;i++){g=Model.g[i];if(g(x)<1e-10)ret+=1e+30;elseret+=r/g(x);}return f(x)+ret;}//**********The following two functions are to get the optional value of fun// in dimensions_turn methodvoid Search(double(*fun)(double *, double ),double Accur,int s,double X[],double r,int Dim) {double S[MAXDEM],AidX[MAXDEM],h=1;int i;for(i=0;i<Dim;i++){if(i==s)S[i]=1;elseS[i]=0;}while(fabs(h)>Accur){for(i=0;i<Dim;i++)AidX[i]=X[i]-h*S[i];if(fun(X,r)>fun(AidX,r)){for(i=0;i<Dim;i++)X[i]=AidX[i];h*=2;}elseh=h*(-1.0/4.0);}}void Demensions_Turn(double(*fun)(double *, double),double Accur,double* X,double r,int Dim) {double AidX[MAXDEM],Mod=1;int i;while(Mod>Accur){Mod=0;for(i=0;i<Dim;i++)AidX[i]=X[i];for(i=0;i<Dim;i++)Search(fun,Accur,i,X,r,Dim);for(i=0;i<Dim;i++)Mod+=(AidX[i]-X[i])*(AidX[i]-X[i]);Mod=sqrt(Mod);}}//The function is to get the optional value of the modelvoid Sum_In(double x[],double Accur,int Dim){double Aidx[MAXDEM],r=1,mod=10;int i;printf("\tr");for(i=0;i<Dim;i++)printf("\tx%d",i+1);printf("\tf(x*)\n");while(mod>Accur&&r>1e-10){mod=0;r *=0.02;for(i=0;i<Dim;i++)Aidx[i]=x[i];Demensions_Turn(fun,Accur,x,r,Dim);printf("%10.9lf",r);for(i=0;i<Dim;i++){printf("%10.5lf",x[i]);if(fabs(Aidx[i]-x[i])>mod)mod=fabs(Aidx[i]-x[i]);}printf("%10.5lf",f(x));printf("\n");}printf("\tr");printf("\tx%d",i-1);printf("\tx%d",i);printf("\tf(x*)\n");printf("%10.9lf",r);printf("%10.5lf",x[i-2]);printf("%10.5lf",x[i-1]);printf("%10.5lf",f(x));printf("\n");}int main(){double x[2]={1,0},Accur=0.000000005;//Initial the ModelModel.f=f;Model.g[0]=g1;Model.g[1]=g2;Model.stNum=2;Sum_In(x,Accur,2);return 0;}六、实验结果及分析从运行结果可以看出,最优解为:*(0,0)Tx=最优值为:()0f x=。
Matlab中的模拟与仿真技术详解
Matlab中的模拟与仿真技术详解引言Matlab是一种被广泛应用于科学研究和工程领域的高级计算环境和编程语言。
它提供了丰富的函数库和工具箱,使得模拟和仿真技术得以在各种科学和工程应用中发挥出色的作用。
本文将详细介绍Matlab中的模拟与仿真技术,并深入探讨其在不同领域的应用。
一、Matlab中的模拟技术1.1 数学模型的建立在Matlab中进行模拟,首先需要建立相应的数学模型,以描述系统的行为。
数学模型可以是一组方程、差分方程、微分方程等,用于描述系统的输入、输出和中间变量之间的关系。
Matlab提供了强大的数学工具,如符号计算工具箱,可以帮助用户更方便地建立和求解各种数学模型。
1.2 信号与系统模拟信号与系统模拟是Matlab中常见的一种模拟技术。
通过模拟信号的输入、处理和输出过程,可以对系统进行分析和验证。
在Matlab中,可以使用信号处理工具箱中的函数来生成、操作和分析各种类型的信号。
例如,可以生成正弦波、方波、脉冲信号等,并对它们进行滤波、频谱分析、时频分析等操作。
1.3 电路模拟电路模拟是Matlab中另一个常用的模拟技术。
通过建立电路模型,可以对电路的行为进行仿真和分析。
Matlab提供了电路仿真工具箱,用户可以通过搭建电路拓扑结构和设置元器件参数,实现对电路的模拟和分析。
这种电路模拟技术在电子电路设计、性能评估和故障诊断等领域有广泛的应用。
1.4 机械系统模拟除了信号与系统和电路模拟外,Matlab还可以进行机械系统的模拟。
通过建立机械系统的动力学模型,可以预测物体的运动规律、受力情况等。
Matlab提供了机械系统建模和仿真工具箱,用户可以建立刚体系统、弹簧阻尼系统等,并进行仿真和动态分析。
这种机械系统模拟技术在机械工程、工业设计等领域具有重要的应用价值。
二、Matlab中的仿真技术2.1 数值仿真数值仿真是Matlab中最常见的仿真技术之一。
它通过数值计算方法对系统进行仿真,并得到系统的数值解。
matlab仿真教程
matlab仿真教程MATLAB是一款常用的科学计算软件,也是一个非常强大的数学仿真工具。
它可以用于解决各种数值计算问题,并且具有强大的绘图能力。
本文将介绍MATLAB的基本使用方法和仿真教程。
首先,我们需要了解MATLAB的基本界面。
MATLAB的界面通常分为几个主要部分,包括工作区、命令窗口、编辑器窗口、命令历史窗口、变量和文件目录窗口等。
在工作区中,我们可以查看当前的变量和数据;在命令窗口中,我们可以直接输入和运行MATLAB命令;而编辑器窗口则是用于编写和编辑MATLAB脚本和函数。
接下来,我们可以开始进行一些简单的数学仿真。
例如,我们可以用MATLAB计算一个数列的和。
在命令窗口中,我们可以输入以下命令:```x = 1:10;sum(x)```上述代码首先定义了一个长度为10的数列x,然后使用了sum函数计算了这个数列的和,并将结果显示在命令窗口中。
我们可以看到,MATLAB非常方便地完成了这个数学计算任务。
除了数学计算,MATLAB还可以进行各种科学计算和数据处理。
例如,我们可以使用MATLAB进行信号处理和滤波。
下面的代码演示了如何用MATLAB生成一个含有噪声的正弦信号,并对它进行滤波:```t = 0:0.01:2*pi;x = sin(t) + 0.1*randn(size(t));y = medfilt1(x, 5);subplot(2,1,1), plot(t,x), title('原始信号')subplot(2,1,2), plot(t,y), title('滤波后的信号')```上述代码首先生成了一个时间序列t,然后生成了一个含有噪声的正弦信号x。
接着,使用了medfilt1函数对信号x进行中值滤波,并将结果存储在变量y中。
最后,使用subplot函数将原始信号和滤波后的信号绘制在一张图中。
我们可以看到,MATLAB不仅提供了丰富的信号处理函数,而且具有强大的绘图能力。
matlab仿真实验
matlab仿真实验实验一典型环节的MATLAB 仿真一、实验目的1.熟悉MATLAB 桌面和命令窗口,初步了解SIMULINK 功能模块的使用方法。
2.通过观察典型环节在单位阶跃信号作用下的动态特性,加深对各典型环节响应曲线的理解。
3.定性了解各参数变化对典型环节动态特性的影响。
二、SIMULINK 的使用MATLAB 中SIMULINK 是一个用来对动态系统进行建模、仿真和分析的软件包。
利用SIMULINK 功能模块可以快速的建立控制系统的模型,进行仿真和调试。
1.运行MATLAB 软件,在命令窗口栏“>>”提示符下键入simulink 命令,按Enter 键或在工具栏单击按钮,即可进入如图1-1所示的SIMULINK 仿真环境下。
2.选择File 菜单下New 下的Model 命令,新建一个simulink 仿真环境常规模板。
3.在simulink 仿真环境下,创建所需要的系统。
以图1-2所示的系统为例,说明基本设计步骤如下:1)进入线性系统模块库,构建传递函数。
点击simulink 下的“Continuous ”,再将右边窗口中“Transfer Fen ”的图标用左键拖至新建的“untitled ”窗口。
2)改变模块参数。
在simulink 仿真环境“untitled ”窗口中双击该图标,即可改变传递函数。
其中方括号内的数字分别为传递函数的分子、分母各次幂由高到低的系数,数字之间用空格隔开;设置完成后,选择OK ,即完成该模块的设置。
图1-1 SIMULINK 仿真界面图1-2 系统方框图3)建立其它传递函数模块。
按照上述方法,在不同的simulink 的模块库中,建立系统所需的传递函数模块。
例:比例环节用“Math ”右边窗口“Gain ”的图标。
4)选取阶跃信号输入函数。
用鼠标点击simulink 下的“Source ”,将右边窗口中“Step ”图标用左键拖至新建的“untitled ”窗口,形成一个阶跃函数输入模块。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
编程方式实现:
1.惩罚函数
function f=fun(x,r)
f=x(1,1)^2+x(2,1)^2-r*log(x(1,1)-1);
2.步长的函数
function f=fh(x0,h,s,r)
%h为步长
%s为方向
%r为惩罚因子
x1=x0+h*s;
f=fun(x1,r);
3. 步长寻优函数
function h=fsearchh(x0,r,s)
%利用进退法确定高低高区间,利用黄金分割法进行求解h1=0;%步长的初始点
st=0.001; %步长的步长
h2=h1+st;
f1=fh(x0,h1,s,r);
f2=fh(x0,h2,s,r);
if f1>f2
h3=h2+st;
f3=fh(x0,h3,s,r);
while f2>f3
h1=h2;
h2=h3;
h3=h3+st;
f2=f3;
f3=fh(x0,h3,s,r);
end
else
st=-st;
v=h1;
h1=h2;
h2=v;
v=f1;
f1=f2;
f2=v;
h3=h2+st;
f3=fh(x0,h3,s,r);
while f2>f3
h1=h2;
h2=h3;
h3=h3+st;
f2=f3;
f3=fh(x0,h3,s,r);
end
end
%得到高低高的区间
a=min(h1,h3);
b=max(h1,h3);
%利用黄金分割点法进行求解
h1=1+0.382*(b-a);
h2=1+0.618*(b-a);
f1=fh(x0,h1,s,r);
f2=fh(x0,h2,s,r);
while abs(a-b)>0.0001
if f1>f2
a=h1;
h1=h2;
f1=f2;
h2=a+0.618*(b-a);
f2=fh(x0,h2,s,r); else
b=h2;
h2=h1;
f2=f1;
h1=a+0.382*(b-a);
f1=fh(x0,h1,s,r);
end
end
h=0.5*(a+b);
4. 迭代点的寻优函数
function f=fsearchx(x0,r,epson)
x00=x0;
m=length(x0);
s=zeros(m,1);
for i=1:m
s(i)=1;
h=fsearchh(x0,r,s);
x1=x0+h*s;
s(i)=0;
x0=x1;
end
while norm(x1-x00)>epson
x00=x1;
for i=1:m
s(i)=1;
h=fsearchh(x0,r,s);
x1=x0+h*s;
s(i)=0;
x0=x1;
end
end
f=x1;
5. 主程序
clear
clc
x0=[2;2]; %给定初始点
r=1;
c=0.1;
epson=0.001;
x1=fsearchx(x0,0.1,epson);
while norm(x0-x1)>epson
x0=x1;
r=r*c;
x1=fsearchx(x0,r,epson) ;
end
disp '函数的最优解为'
x1
运行结果:
函数的最优解为
x1 =
1.0475
-0.0005。