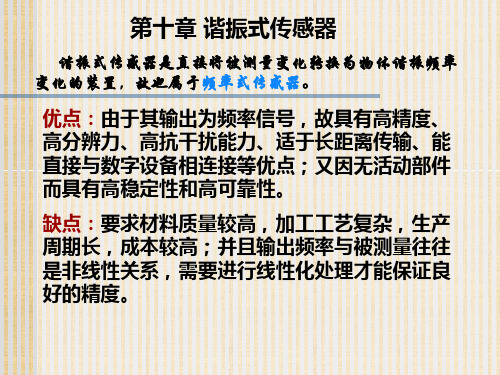
谐振式传感器
不同类型的谐振式传感器
不同类型的谐振式传感器谐振式传感器是一种基于谐振现象的传感器。
它利用物理体的固有频率来检测或测量外部力或质量的变化。
谐振式传感器可以用于测量不同的物理量,如力、质量、压力、加速度等。
它们通常被用于工业、医疗、科学实验和研究等领域中。
以下是不同类型的谐振式传感器:压电谐振式传感器压电谐振式传感器是利用压电效应来实现传感的。
该传感器使用压电陶瓷等材料来制造,当该材料受到外力作用时,它会产生电荷,这种电荷可以被检测到并用于测量外部力的大小。
压电谐振式传感器被广泛应用于汽车工业中,用于测量引擎和车轮的振动和冲击。
此外,压电谐振式传感器也被用于医学、机械和航空等领域中。
磁浮谐振式传感器磁浮谐振式传感器是一种利用磁浮现象来实现传感的传感器。
该传感器使用磁悬浮技术将传感器浮在气垫上,从而消除了机械接触,使传感器具有非常高的灵敏度和准确性。
磁浮谐振式传感器被广泛应用于航空、航天、半导体、医学和机械等领域中。
由于其高灵敏度和准确性,它在检测微小物理量方面表现得非常优秀。
光学谐振式传感器光学谐振式传感器是一种基于光学原理的传感器。
该传感器利用光学腔来实现传感。
当外部物理量发生变化时,光学腔的谐振频率也会发生变化,从而可以检测到外部物理量的变化。
光学谐振式传感器可以用于测量加速度、力、压力和温度等参数。
它在化学、环境、气体检测和生物医学等领域中得到了广泛应用。
容积谐振式传感器容积谐振式传感器是一种基于容积变化原理的传感器。
该传感器利用容积缩小或增大的过程来反映外部物理量的变化。
它通常由一个空间扭转薄膜以及一个振荡频率保持器构成。
容积谐振式传感器可以用于测量压力、质量和加速度等物理量。
这种传感器被广泛应用于工业自动化、医疗和科学实验室等领域。
结论谐振式传感器是一种非常重要的传感器类型。
它们使用物理体的固有频率来测量外部物理量,具有精度高、响应速度快、易于集成和制造等优点。
不同类型的谐振式传感器具有不同的工作原理和适用范围,因此在选择传感器时需要考虑应用的具体领域和需要测量的物理量等因素。
谐振式传感器的类型及优缺点
谐振式传感器的类型及优缺点谐振式传感器的种类许多,大体分为两类:一类是基于机械谐振结构谐振式传感器;另一类是MOS环振式谐振传感器。
其中机械式谐振式传感器应用最广。
机械式谐振传感器的振子可以有不同的结构形式,图所示为常见的 a 张丝状、b 膜片状、c 筒状、d 梁状等,相应的有振动弦式、振动膜式、振动筒式、振动梁式等谐振传感器之分。
通常振子的材料采纳诸如铁镍恒弹合金等具有恒弹性模量的所谓恒模材料。
但这种材料较易受外界磁场和四周环境温度的影响。
石英晶体在一般应力下具有很好的重复性和最小的迟滞,其谐振子的品质因素Q值极高,并且不受环境温度影响,性能长期稳定,因此采纳石英晶体作为振子可制成性能更加优良的压电式谐振传感器。
其振子通常采纳振膜或振梁外形,但按振子上下表面外形它又分为e 扁平形、f 平凸形和g 双凸形三种,如图2所示。
表1给出了各种类型机械式谐振传感器的优缺点及应用领域。
图振子的结构类型表1 各种类型机械式谐振传感器的优缺点及应用领域类型优点缺点应用领域振弦式传感器结构简洁坚固、测量范围大、灵敏度高、测量电路简洁对传感器的材料和加工工艺要求很高,精度较低广泛用于大压力的测量,也可用来测量位移、扭矩、力和加速度等振膜式传感器具有很好的稳定性、重复性和较高的辨别率(一般可达0.3~0.5kPa/Hz)。
精度可达0.01%,重复性可达十万分之几的数量级,长期稳定性可达每年0.01~0.02%对传感器的材料和加工工艺要求很高,精度较低航空航天技术中大气参数(静压及动压) 的测量;它还常用来做标准计量仪器标定其它压力传感器或压力仪表。
此外,它也可以测液体密度、液位等参数振筒式传感器迟滞误差和漂移误差小,稳定性好,辨别率高以及轻巧、成本低对传感器的材料和加工工艺要求很高,精度较低主要用于测量气体的压力和密度等振梁式传感器稳定性好抗干扰强对传感器的材料和加工工艺要求很高,精度较低测静态力和准静态力压电式谐振传感器体积小,重量轻;稳定性好;Q值可达40000;动态响应好;抗干扰力量强( 不受外界磁场干扰,灵敏度稳漂为4% -5%/℃)对传感器的材料和加工工艺要求很高压力压差。
谐振式硅微传感器闭环系统动态特性影响因素
Dy m i na c Cha a t rs i nfue c c or fRe o an l o i r sr c ur e or Cl s d—o p S s e r c e itc I l n e Fa t s o s n tSi c n M c o-t u t e S ns o e l o y t m i XI NG e we W i i, FENG a ya Xi o n, FAN Sha ch ng un, TANG Zhan ya g ng
( col f nt m n Si c Sho o su et c ne& O t— et nc,B in nvrt o A rnui n s oat s B in 0 1 1 C ia I r e p e c oi o l r s eigU iesy f eoat sadA t nui , e ig10 9 , hn ) j i c r c j
i rv n h y a c c a a trs c o h ls d lo y t m frs n n r s u e s n o . mp o i g t e d n mi h r c e t f e co e — p s se o e o a tp e s r e s r i i t o Ke r s e o ae e s r ls d lo y t m;d n mi h rc e si y wo d :r s n t ;s n o ;co e — p s s o e y a c c aatr t i c
Ab t a t y a c c aa trs c i o e o e mo t mp ra t ef r n e i d x so n o . h y a c c aa trs c i u n ef co so s r c :D n mi h r ce it s n f h s i o t n roma c n e e fs s r T e d n mi h r ce t n e c a tr f i t p e i i f l p e s r e s r co e — o y tm a e n t e ma nt d rq e c h r ce si r n lz d a d rl v n x e me th s b e o d ce . r su e s n o ls d l p s s o e b s d o h g i e fe u n y c a a tr t a e a ay e n ee a te p r n a e n c n u td u i c i T e e a e tr e man f co sa c r i gt ep n i l f h l s d lo y t m.Th r t st er s o s i f h e o ao ' n t r l r q e c h r r h e i a tr c od n t r cp e o eco e —o p s s oh i t e ef s h e p n et i i me o er s n tr a u a e u n y t s f t r s u e T e s c n st e s a y vb ain et b i ig t f h e o ao .T els n h i n l n aa p o e sn i .E p r n o p e s r . h e o d i h t d i rt sa l h n i o e rs n tr h a t e i t e sg a dd t r c s ig t e o s me t o s a me x e i me —
第9章谐振式传感器_2精选全文
9.1.2 谐振式传感器的基本原理
然而阻尼总是存在的,除电磁阻尼外还有空 气阻尼等。振弦在运动过程中切割磁力线产生感 应电势,该电势通过外接闭合回路形成电流,使 振弦受到大小正比于运动速度、方向和运动速度 相反的磁场力的作用,此即电磁阻尼。
设想将上述感应电势测出来,然后通过正反 馈在振弦两端加幅度相同、相位也相同的外接电 势,则不会产生电磁阻尼。若外接电势略大于上 述感应电势,还可消除其他阻尼的影响。
9.1 谐振式传感器的类型与原理
√ 9.1.1 谐振式传感器的类型 9.1.2 谐振式传感器的基本原理
9.1.2 谐振式传感器的基本原理
设振子等效刚度为ke,等效振动质量为me,则 振子谐振频率f可近似表示为
f 1 ke
(9.1)
2π me
若振子受到力的作用或其中的介质质量发生
变化,导致振子的等效刚度或等效振动质量发生
(a)扁平形
(b)平凸形
h
(c)双凸形
9.1.1 谐振式传感器的类型
根据能陷理论,选择谐振子外形的主要依据
是径向尺寸f和晶片厚度h之比值的大小。一般, 在f/h≤15时,采用双凸形。当15<f/h≤45时, 采用平凸形f/h>45时,采用扁平形。
9.1.1 谐振式传感器的类型
石英晶体振荡器的基本原理 在石英晶体的电极上施加交变激励电压时,
变化,其谐振频率也会发生变化。此即机械式谐
振传感器的基本工作原理。
9.1.2 谐振式传感器的基本原理
1.谐振频率 如图所示,一根两端固定,长
度为l,线密度(单位长度质量)为r
的弦,受到张力T作用。其谐振频 率(一次振型)为
x Tl
f 1 1 T 2π 2l 2l r
第9章 谐振式传感器讲解

9.1.1 谐振式传感器的类型
随着微电子技术和微机械加工技术的兴起,以 硅为振子材料的硅微机械谐振传感器越来越受到了 重视。这种传感器利用成熟的硅集成制造工艺,能 得到大批量的可靠性高、灵敏度高、价格低廉、体 积小、功耗低的产品,特别是便于构成集成化测量 系统。其振子常为微悬臂梁、两端固支微梁(桥)、 方膜或圆膜等形状,尺寸在微米量级。
即可得两个微分方程
d2Y/dx2 (w/)2Y 0 (9.6) d2G/dt 2 w2G 0 (9.7)
9.1.2 谐振式传感器的基本原理
d2Y/dx2 (w/)2Y 0 (9.6) d2G/dt 2 w2G 0 (9.7)
其一般解为
Y Asin(wx/) B cos(wx/) (9.8)
当15<f/h<45时,采用平凸形,优点是边
缘效应小,振动活力较高,频率温度特性曲线一 致性较好。
f/h>45时,采用扁平形。
9.1.1 谐振式传感器的类型
石英晶体振荡器的基本原理 在石英晶体的电极上施加交变激励电压时,
由于逆压电效应,石英晶体会产生机械振动。石 英晶体是弹性体,它存在固有振动频率。当强迫 振动频率等于其固有振动频率时会产生谐振。
因弦的斜率为q=y/x,所以上式可变换为
2y r 2y
x2 T t 2
2 y x 2
1
2
2 y t 2
(9.3)
式中,2=T/r,可被证明为沿弦传播的波速。
9.1.2 谐振式传感器的基本原理
2y 1 2y
x2 2 Leabharlann 2假设上式的解为y(x,t) Y(x)G(t)
(a)扁平形
mems谐振式加速度传感器工作原理

mems谐振式加速度传感器工作原理哎呀,今天我们来聊聊那个小家伙,MEMS谐振式加速度传感器。
这个东西可真是个神奇的玩意儿!你有没有想过,我们身边的手机、平板,甚至一些智能家居设备里,竟然都藏着这样一个“小天才”?说到它的工作原理,嘿嘿,就像一个舞者在舞台上优雅地摇摆。
它里面有个微小的谐振器,像个乐手,负责感知加速度的变化。
想象一下,当你坐在过山车上,突然间一阵失重的感觉袭来,哇,刺激得不行!就是这个谐振器在欢快地工作。
它通过检测物体的振动变化,来判断加速度的方向和大小。
你看,这种小东西能在那么快的速度下,实时传递信息,简直就像在打快板。
无论是上坡还是下坡,它都能准确地“说”出你的加速度。
这玩意儿的构造可真精巧,内部的小部件就像乐队里的乐器,互相配合得天衣无缝。
MEMS技术让这些传感器小到几毫米,轻得像羽毛,却又能承受各种外界的挑战。
试想一下,日常生活中,我们走路、骑车、开车,都会有各种加速度的变化,而这个传感器就像个“侦探”,随时捕捉着这些动态。
更有趣的是,它的工作原理和我们生活中的很多现象都有联系。
比如说,当你急刹车时,身体会向前倾,那感觉就像被拉扯了一下,对吧?传感器就是通过检测这些“拉扯”来判断你当前的状态。
它的反应速度快得惊人,就像是一位老练的赛车手,瞬间就能做出决策。
我们再说说它的应用吧!在汽车行业,MEMS加速度传感器被广泛用于安全气囊的触发,真是事关生死的大事啊!它能够快速感知到碰撞,及时让安全气囊弹出,保护乘客的安全。
想想看,这小小的传感器竟能在危机时刻“出手相助”,真是令人佩服!在智能手机中,它的作用更是无处不在。
手机的屏幕自动旋转、游戏中的重力感应,都是它在背后默默支持的结果。
玩游戏的时候,你轻轻一摇,角色就开始飞速移动,那可是这位“幕后英雄”在操控哦!没有它,我们的生活可就失色不少。
这传感器还在运动设备中大显身手。
像智能手表、健身追踪器,都是利用它来监测运动状态的。
它能够记录你的步伐、跑步速度,甚至心率,让你对自己的运动情况一目了然。
谐振式传感器工作原理
谐振式传感器工作原理谐振式传感器的工作原理,嘿,听起来是不是有点复杂?但它的背后可有一番故事呢。
想象一下,有一个小家伙在不停地摇晃,它就像是一个不停抖动的跳蚤。
这种传感器的核心其实就是一个振动体,简单来说,它就像你夏天扇扇子,轻轻一扇,它就会随着风的方向和力量而摆动。
好吧,这个小家伙可不是随便摆的,它有自己的频率。
哎,这频率可有意思了。
每种材料、每个形状都有它自己独特的振动方式,简直像每个人都有自己擅长的舞步一样。
咱们再聊聊这个“谐振”吧。
谐振,就是当外部力量与这个小家伙的自然频率完美匹配的时候,它会摆动得更加剧烈,简直像是对着观众狂欢的舞者。
这个过程,简直让人想起那句老话:“有缘千里来相会”,没错,就是那么巧。
你要是轻轻一碰,它就像被点燃的烟花,瞬间绽放,发出一阵强烈的信号。
这个信号可了不得,它可以被传感器捕捉到,然后转化为我们可以理解的电信号。
现在,想想看,这些电信号就像是信息的快递员,把舞蹈的讯息传递到大脑。
它们经过处理,就能告诉我们到底发生了什么,是温度在变化,还是压力在增大,甚至是其他物理量的变化。
这可比你家小猫追着自己的尾巴有趣多了。
要是没有这些谐振式传感器,咱们可能就会错过许多重要的信息,简直就像没听见朋友叫你去吃火锅一样。
再说说应用吧,真是广泛得让人目瞪口呆。
这玩意儿可不是只在实验室里待着,它们在我们生活的每一个角落都能见到。
比如说,汽车里的传感器,它们会监测发动机的振动,确保一切运转良好,免得你在路上抛锚。
又或者在手机里,它们能帮助监测各种环境因素,让你的设备能够自动调节,以适应不同的情况。
想想你那智能手机,有没有感觉到它像个小精灵一样聪明?而且啊,谐振式传感器的优点还真不少,灵敏度高、响应快,简直可以称得上是“精致小巧”的代表。
这让它在很多高精度要求的场合大显身手,比如医学设备、航空航天等领域。
它们像是科学家的得力助手,随时待命,确保一切都在掌控之中。
想想那些高大上的航天器,如果没有这些传感器,它们可能就像没头苍蝇一样,东奔西跑。
第十章 谐振式传感器
振梁式力传感器
五、压电谐振式传感器
如图所示为由石英晶体谐振器构成的 振梁式压差传感器。两个相对的波纹 管1用来实现压力差的传递,采用杠杆 3形成绕支点4的力矩并传递给力敏石 英振子7,它受拉伸或压缩力作用后改 变了晶体的谐振频率。通过改变杠杆 臂比以及波纹管的截面积和配重6来选 择合适的压力-频率转换关系。壳体2 所包围的空间5抽成真空。
1、电流法
谐振式传感器的电流法电路
1、电流法
1、电流法
1 T f 2l 1
2、电磁法
谐振式传感器的电磁法电路
3、电荷法
该方法利用晶体逆压电效应产生激振力,石英振子上下表面 各覆盖金属层作为电极引入系统反馈环节的输出信号,则振 子既是振动体又是激励环节。
压电式谐振传感器电路原理框图
第四节 应用举例
幂级数展开
1 T 1 T 2 1 T 3 f 0 [1 ( ) ( ) ....] 2 T 8 T 16 T 1 T 1 T 2 f 0 [1 ( ) ] 2 T 8 T
1 T 2 f0 ( ) 非线性误差 1 T 8 T ( ) 1 T 4 T f0 ( ) 2 T
近 似
式中: p
被测压力 压差灵敏度系数
3(1 2 ) r 3 B ( ) 4E h
压力-频率关系曲线
非线性误差 灵敏度
f0 B f p 2
1 f ( ) 2 f0
f0 B df k dp 2
四、振梁式谐振传感器特性
f f 2 pa b( ) f0 f0
近
似
f0 f p a
非线性误差
压力-频率关系曲线
灵敏度
b f ( ) a f0
f0 df k dp a
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第五章 谐振式传感器
一 概述 二 谐振式传感器的理论基础 三 振动筒压力传感器 四 振动膜式传感器 五 振动弦式传感器 六 振动梁式传感器 七 硅微结构谐振式传感器
二、谐振式传感器的理论基础
1 基本结构 2 闭环自激 3 敏感机理 4 谐振子的Q值 5 设计要点 6 特征与优势
1 基本结构 2 闭环自激 3 敏感机理 4 谐振子的Q值 5 设计要点 6 特征与优势
综上所述,相对其它类型的传感器,谐振式传感器的本质特 征与独特优势是: ① 输出信号是周期的,被测量能够通过检测周期信号而解 算出来。这一特征决定了谐振式传感器便于与计算机 连接,便于远距离传输; ② 传感器系统是一个闭环结构,处于谐振状态。这一特征 决定了传感器系统的输出自动跟踪输入;
将式(5-2)代入式(5-器使用的振动系统总是有振荡的,故式(5-3)的解应写 为
1, 2 n i d (5-4)
n k m c 2 km
在谐振式传感器中,谐振子的品质因素Q值是一个极其重要的指 标,针对能量的定义式为:
每周平均储存的能量 Q 每周由阻尼损耗的能量
(5-16)
1 0 ,利用图5-6所示的谐振子 对于弱阻尼系统, 的幅频特性可给出: 1 Q Am (5-17) 2 n 1 Q (5-18) 2 1 p 2 p1
二、谐振式传感器的理论基础
1 基本结构 2 闭环自激 3 敏感机理 4 谐振子的Q值 5 设计要点 6 特征与优势
实际应用的谐振敏感元件多为弹性敏感元件。在讨论其振动 特性时,可以用一个等效的单自由度有阻尼的系统来描述(如下 图5-2)。图中k,m,c分别为等效刚度、等效质量和等效阻 尼。其自由振动的运动方程为:
t可写为: 当u2经检测器、放大器、激励器后,输出为 u 1
u1t f (u 2 ) A3 sin(t A )
(5-12)
于是满足下式时,系统以频率ω产生闭环自激。
A3 A1
A 2n
(n 0,1,2)
称此为系统可自激的时域幅值、相位条件。 (5-13)
简言之,只要放大器能不断给系统补充由于阻尼所消耗的能 量,同时通过调节移相器又能保证在每个周期同相位迭加,那么 该系统就能进行等幅自激振荡。 再从复频域分析,见图5-5。其中R(s),E(s),A(s),D(s)分 别为谐振子、激励器、放大器和拾振器的传递函数,s为拉氏算 子。满足下式时,系统将以频率ω产生闭环自激。
第五章 谐振式传感器
第五章 谐振式传感器
一 概述 二 谐振式传感器的理论基础 三 振动筒压力传感器 四 振动膜式传感器 五 振动弦式传感器 六 振动梁式传感器 七 硅微结构谐振式传感器
第五章 谐振式传感器
一 概述 二 谐振式传感器的理论基础 三 振动筒压力传感器 四 振动膜式传感器 五 振动弦式传感器 六 振动梁式传感器 七 硅微结构谐振式传感器
( ) arctg
P Q(1 P 2 )
(5-19)
( ) Q(1 P 2 ) 2 P P Q 2 (1 P 2 ) 2
(5-20)
为中心的相角范围 [
当P=1时,
2, ( P ) 2Q,考虑以 2
P 随Q单调增加。这表明:相同的频率变化所引起的相角变 化值随Q值的增大而增加。即在相同的幅值增益下,Q值大的谐 振子所提供的相角范围大,从而便于构成闭环自激系统。
二、谐振式传感器的理论基础
1 基本结构 2 闭环自激 3 敏感机理 4 谐振子的Q值 5 设计要点 6 特征与优势
① 谐振子的选择及其振动特性(即振动模态,包括谐振 频率和振型)的分析、计算,确定谐振子的实际结 构、参数及所敏感的振动特征参数。这部分工作的核 心是建立谐振式传感器的模型,优化出一个高Q值、 高灵敏度的谐振子; ② 检测源、激励源的选择以及谐振子的配合问题。主 要包括它们与谐振子的相对位置的选择与激励能量大 小的确定;
一 、概述
基于谐振技术的谐振式传感器,自身为周期信号输出(准数 字信号),只用简单的数字电路即可转换为微处理器容易接受的 数字信号。谐振式传感器的重复性、分辨率和稳定性等非常优 良,又便于和微处理器直接结合组成数字控制系统,自然成为当 今人们研究的重点。
谐振式传感器大体分为两类:一类是基于机械谐振结构谐振 式传感器;另一类是MOS环振式谐振传感器。本章主要介绍基 于机械谐振结构的谐振式传感器。它们可利用振动频率、相位和 幅值作为敏感信息的参数。由于谐振式传感器有许多优点,也适 于多种参数测量,如压力、力、转角、流量、温度、湿度、液 位、粘度、密度和气体成分等,所以这类传感器已迅速发展成为 一个新的传感器家族。
(n 0,1,2)
称此为系统可自激的复频域幅值、相位条件。以上考虑 的是在一点处的闭环自激条件,对于谐振式传感器,应在其 整个工作频率范围(ωL,ωH)内均满足闭环自激条件。这就 给设计传感器的放大器提出了特殊要求。
二、谐振式传感器的理论基础
1 基本结构 2 闭环自激 3 敏感机理 4 谐振子的Q值 5 设计要点 6 特征与优势
(5-5)
d n 1 2
式中i为虚数单位;ωn为系统的固有频率,取决于谐振敏 感元件的固有特征; ε为系统的等效阻尼比;ωd为系统的振荡频率。
于是(5-1)的解为
x (t ) A0 e nt sin( d t 0 )
式中A0,φ0由系统的初始条件确定。
(5-6)
R(S)
u1
R
u2
E(S) A(S)
D(S)
u1t f (u2 )
DEA 图5-4 时域信号分析
图5-5 复频域分析
R( j ) E ( j ) A( j ) D( j ) 1
R( j ) E ( j ) A( j ) D( j ) 2n
(5-14)
由式(5-6)可知: n增大时,系统的衰减加快,消耗能量 快;ε增大时,系统的振荡周期增长;当ε→0时, 谐振动状态;振动频率只ωd与系统的固有状态有关。
x (t ) A0 sin( n t 0 ) (当ε=0时, d n )。这时系统处于简
当图5-2的系统受到周期激励力作用时,由于周期函数可以展 开为Fourier级数,若考虑为时,系统的振动方程为:
显然,对于给定的φ,Q值增大时, P 1减小,即ω越接近 于这时谐振子所对应的固有频率ωn;传感器自激频率的随机漂 移就越小,系统的振动状态就越稳定,精度就越高。
可见高Q值的谐振子对于构成闭环自激系统及提高系统的性 能是有利的,应采取各种措施提高谐振子的Q值。这是设计谐振 式传感器的核心问题。 影响谐振子Q值的因素主要有:材料自身的特性,加工工 艺,谐振子的结构(边界状况及封装情况)和使用环境等。
③ 检测信号的接收、处理、转换及按幅相条件设计的放大 电路。对于灵敏频率的谐振式传感器要在满量程内综合 考虑,而敏感幅值比、相位差的谐振式传感器要合理设 计出“ 双闭环” 系统,并选择好参考位置。 ④ 引入恰当的补偿机制,解算检测信号,给出被测量。
二、谐振式传感器的理论基础
当P 1 2 2 时,A(ω)达到最大值,有
A max
1 2 1
2
1 2
(5-10)
这时系统的相角偏移为:
arctg
1 90
由上面分析可知:谐振式传感器闭环自激的频率点必然接近于谐 振敏感元件的固有频率。下面讨论闭环自激的条件。
(a)幅频特性 (b)相频特性 图5-3 幅相特性
下图给出了谐振式传感器的基本结构。
补偿装置 谐振子 被测量M R D O 输出X(t) 信号检测器 C
E
A 放大器
系统检测输出
激励器
图5-1 谐振式传感器的基本结构
由ERD组成的电— 机— 电谐振子环节,是谐振 式传感器的核心。适当地选择激励和拾振手 段,构成一个理想的ERD,对设计谐振式传感 器至关重要。 由ERDA组成的闭环自激环节,是构成谐振式 传感器的条件。 由RDO(C)组成的信号检测、输出环节,是实 现检测被测量的手段。
kx 0 m x c x
( 5-1 )
式中,,kx分别为系统的惯性力、阻尼力和弹性力,它们分 别表征维持系统运动状态的能力、消耗系统能量的程度和改变系 统运动状态的能力。
图5-2 单自由度振动系统
式(5-1)自由振动的解为:
x A e t (5 -2 )
(5-8)
A( )
C0 B K 1 (5-9)
(1 P 2 ) 2 ( 2P ) 2 2P ( ) arctg 1 P2
P
n
式中C0是幅值为B的恒静力对系统产生的位移; A(ω),φ(ω)分别称为图5-2系统的幅频特性和相频特 性。图5-3给出了他们的示意图。
显然,只要被测量能较显著地改变检测信号x(t)的某一特征参 数,谐振式传感器就能通过检测上述特征参数来实现对被测量的 检测。 在谐振式传感器中,目前国内外使用最多是检测频率ω,如 谐振筒压力传感器、谐振式膜压力传感器等。
二、谐振式传感器的理论基础
1 基本结构 2 闭环自激 3 敏感机理 4 谐振子的Q值 5 设计要点 6 特征与优势
③ 谐振式传感器的敏感元件即谐振子固有的谐振特性,决 定其具有高的灵敏度和分辨率; ④ 相对与谐振子的振动能量,系统的功耗是极小量。这一 特征决定了传感器系统的抗干扰性强,稳定性好。
第五章 谐振式传感器
一 概述 二 谐振式传感器的理论基础 三 振动筒压力传感器 四 振动膜式传感器 五 振动弦式传感器 六 振动梁式传感器 七 硅微结构谐振式传感器