高速高精度叠层直线运动控制系统
MPC08SP使用手册
当有可疑的故障时不要进行操作。如果您怀疑本产品有损伤,请让有资格的服 务人员进行检查。
不要在的湿的/潮湿环境下操作。 不要在爆炸性的空气中操作。 保持产品表面清洁和干燥。 防止静电损伤。静电释放(ESD)可能会对运动控制卡及其附件中的元件造成 损伤。为了防止 ESD,请小心处理控制卡元件,不要触摸控制卡上元器件。不要将 控制卡放置在可能产生静电的表面。在防护静电的袋子或容器内运输和储存控制 卡。
MPC08SP 运动控制卡
操 作 手 册
第 2.0 版·2006
版权申明
乐创自动化技术有限公司 保留所有权利
乐创自动化技术有限公司(以下简称乐创自动化公司)保留在不事 先通知的情况下,修改本手册中的产品和产品规格等文件的权利。
乐创自动化公司不承担由于使用本手册或本产品不当,所造成直接 的、间接的、附带的或相应产生的损失或责任。
2 控制卡的安装 ......................................................................6
2.1 开箱检查..................................................................................................6 2.2 控制卡的外型结构..................................................................................7 2.3 硬件安装..................................................................................................9 2.4 软件安装..................................................................................................9
先进飞行控制系统的设计与实现
先进飞行控制系统的设计与实现飞行,一直以来都是人类追求自由和探索未知的梦想。
而先进飞行控制系统的出现,则为实现更安全、更高效、更精准的飞行提供了关键的技术支持。
它就像是飞行员的得力助手,时刻确保飞机在复杂多变的环境中稳定飞行。
先进飞行控制系统的设计是一个极其复杂且充满挑战的过程。
它需要综合考虑众多因素,包括飞机的气动特性、结构强度、动力系统、飞行任务需求等等。
首先,对于飞机的气动特性要有深入的了解。
这涉及到空气动力学的知识,要知道飞机在不同速度、高度和姿态下,空气对其产生的力和力矩的变化。
通过风洞试验和数值模拟等手段,可以获取到这些关键的数据,为控制系统的设计提供基础。
在了解了飞机的气动特性后,接下来就要确定飞行控制系统的架构。
这包括传感器的选择和布局、执行机构的类型和位置,以及控制算法的设计。
传感器就像是飞机的“眼睛”,能够感知飞机的姿态、速度、高度等重要信息。
常见的传感器有陀螺仪、加速度计、气压计等。
执行机构则负责根据控制指令来改变飞机的状态,比如控制舵面的偏转、发动机推力的大小等。
控制算法是飞行控制系统的核心。
它的任务是根据传感器获取到的信息,经过一系列的计算和处理,生成控制指令,以实现对飞机的精确控制。
目前,常用的控制算法包括经典控制理论中的 PID 控制,以及现代控制理论中的状态空间控制、最优控制等。
这些算法各有特点,需要根据具体的飞行任务和飞机特性来选择和优化。
除了硬件和算法,软件也是飞行控制系统的重要组成部分。
软件开发需要遵循严格的规范和标准,以确保系统的可靠性和安全性。
同时,软件还要具备良好的人机交互界面,方便飞行员进行操作和监控。
在设计完成后,就进入了飞行控制系统的实现阶段。
这一阶段需要将设计方案转化为实际的硬件和软件,并进行集成和测试。
硬件的制造需要高精度的加工工艺和严格的质量控制,以确保其性能和可靠性。
软件的编写则需要熟练的编程技术和丰富的经验。
集成测试是整个实现过程中的关键环节。
欧姆龙-MLCC设备案例

进口印刷机
进口叠层机
MLCC行业课题及分析
年产能2400亿颗
21年5月 ,投资37.5亿
年产能3000亿颗
宇阳
安徽滁州
/
20年12月总投资22亿
年产能5000亿颗
微容
广东云浮
/
2021年4月 ,年产6000亿颗扩建
一期投资20亿 ,年产能3000亿颗
2028年逐步达到年产15000亿颗
海容
无锡
/
22年4月总投资103亿元,年产4000亿颗
光之神
杭州
/
22年4月,总投资55亿元
昀冢
安徽省池州市
/
2021年8月,总投资11.24亿元,年产720亿颗
©2020OMRONCorporation3
MLCC行业设备潜力
生产工序
设备名称
设备数量(台)
流延
印刷
叠层
切割
流延机
150-200
印刷机
500-600
叠层机
1500-2400
切割机
1000-1500
/
京瓷
日本、 中国温州
2018年2月底停产0603/0401部 分规格
/
国巨
台湾、苏 州、东莞;收购美国基美
/
2019年底扩产至 600亿只/月、
2020年底扩产至700亿只/月
风华高科
广东肇庆
/
75亿高端MLCC项目
年产能5400亿颗
三环集团
广东潮州 , 四川南充 , 四川德阳
/
20年3月 ,投资22.75亿
CONFIDENTIAL
MLCC行业分析
国内外MLCC投资计划
机器人结构设计
*
2、技术设计
(1)机器人基本参数的确定。臂力、工作节拍、工作范围、运动速度及定位精度等。 举例:定位精度的确定 机器人或机械手的定位精度是根据使用要求确定的,而机器人或机械手本身所能达到的定位精度取决于定位方式、运动速度、控制方式、臂部刚性、驱动方式、缓冲方式等。 工艺过程的不同,对机器人或机械手重复定位精度的要求也不同,不同工艺过程所要求的定位精度如下: 金属切削机床上下料:±(0.05-1.00) mm 冲床上下料:±1 mm 模锻: ±(0.1-2.0) mm 点焊: ±1 mm 装配、测量: ±(0.01-0.50) mm 喷涂: ±3 mm 当机器人或机械手本身所能达到的定位精度有困难时,可采用辅助工夹具协助定位的办法,即机器人实现粗定位、工夹具实现精定位。
传动方式选择 (1)选择驱动源和传动装置与关节部件的连接、驱动方式 (2)工业机器人的传动形式
传动形式
特征
优点
缺点
直接连结传动
直接装在关节上
结构紧凑
需考虑电机自重,转动惯量大,能耗大
远距离连结传动经远距离传动置与关节相连不需考虑电机自重,平衡性良好
额外的间隙和柔性,结构庞大,能耗大
间接传动
减速比远>1的传动装置与关节相连
3.模块化工业机器人所存在的问题 (1)模块化工业机器人整个机械系统的刚度比较差。因为模块之间的结合是可方便拆卸的,尽管在设计上已经注意到了标准机械接口的高精度要求,但实际制造仍会存在误差,所以与整体结构相比刚度相对地差些。 (2)因为有许多机械接口及其它连接附件,所以模块化工业机器人的整体重量有可能增加。 (3)虽然功能模块的形式有多种多样,但是尚未真正做到根据作业对象就可以合理进行模块化分析和设计。
高精度运动控制系统的关键技术及综合运用ppt课件

3
公司简介(二)
此外公司还与秦皇岛海纳科技公司 合作研发了国内首款可驱动直线电机和 旋转电机的通用型伺服驱动器。该驱动 器具有高阶轨迹生成、支持用户编程等 高端功能,产品性能已达到国际先进水 平,可广泛用于高精密运动控制系统的 驱动和控制。
17
总结
❖ 运动控制技术是多学科复合技术:机械与电子、硬件和软件、算法 和分析
❖ 运动控制应用范围广:开环控制或闭环控制、半闭环或全闭环控制 ❖ 采用闭环控制首要考虑的是系统稳定性 ❖ 运动控制的性能不仅要考核时域响应,还要考核频域特性 ❖ 运动控制系统由控制平台、功率放大器/驱动器、执行机构/电机/
安装误差的影响
15
实例:编码器安装对信号质量及精度的影响(续) 信号质量对误差影响
16
运动控制系统的保护
软件级 •计算错误保护 •位置误差保护 •饱和保护 •震荡保护 •RMS功率保护 •电源故障保护 •急停保护
机械级 •机械限位装置 •机械刹车/卡紧装置 •机械防撞装置 •… …
硬件级 •限位传感器保护 •看门狗保护 •电源故障保护 •过功率保护 •驱动器短路保护 •驱动器过压/欠压保护 •驱动器过温保护 •驱动器RMS电流保护 •… …
➢ 光栅尺的精度
➢ 线距,或信号周期(每毫米线数,或每圈线)
➢ 光栅尺的热敏系数
➢ 差值技术
➢ 信号质量
➢ 频率响应与最高速度
旋转编码器最大速度 = [工作频率 (Hz) / (每转线数) ]*60 [RPM]
数控系统

数控系统是数字控制系统的简称,英文名称为(Numerical Control System),根据计算机存储器中存储的控制程序,执行部分或全部数值控制功能,并配有接口电路和伺服驱动装置的专用计算机系统。
通过利用数字、文字和符号组成的数字指令来实现一台或多台机械设备动作控制,它所控制的通常是位置、角度、速度等机械量和开关量。
是数字控制系统简称,英文名称为Numerical Control System,早期是由硬件电路构成的称为硬件数控(Hard NC),1970年代以后,硬件电路元件逐步由专用的计算机代替称为计算机数控系统。
计算机数控(Computerized numerical control,简称CNC)系统是用计算机控制加工功能,实现数值控制的系统。
CNC系统根据计算机存储器中存储的控制程序,执行部分或全部数值控制功能,并配有接口电路和伺服驱动装置的专用计算机系统。
CNC系统由数控程序、输入装置、输出装置、计算机数控装置(CNC装置)、可编程逻辑控制器(PLC)、主轴驱动装置和进给(伺服)驱动装置(包括检测装置)等组成。
CNC系统的核心是CNC装置。
由于使用了计算机,系统具有了软件功能,又用PLC代替了传统的机床电器逻辑控制装置,使系统更小巧,其灵活性、通用性、可靠性更好,易于实现复杂的数控功能,使用、维护也方便,并具有与上位机连接及进行远程通信的功能。
目前世界上的数控系统种类繁多,形式各异,组成结构上都有各自的特点。
这些结构特点来源于系统初始设计的基本要求和工程设计的思路。
例如对点位控制系统和连续轨迹控制系统就有截然不同的要求。
对于T系统和M系统,同样也有很大的区别,前者适用于回转体零件加工,后者适合于异形非回转体的零件加工。
对于不同的生产厂家来说,基于历史发展因素以及各自因地而异的复杂因素的影响,在设计思想上也可能各有千秋。
例如,美国Dynapath系统采用小板结构,便于板子更换和灵活结合,而日本FANUC系统则趋向大板结构,使之有利于系统工作的可靠性,促使系统的平均无故障率不断提高。
LTCC生产设备简介讲解
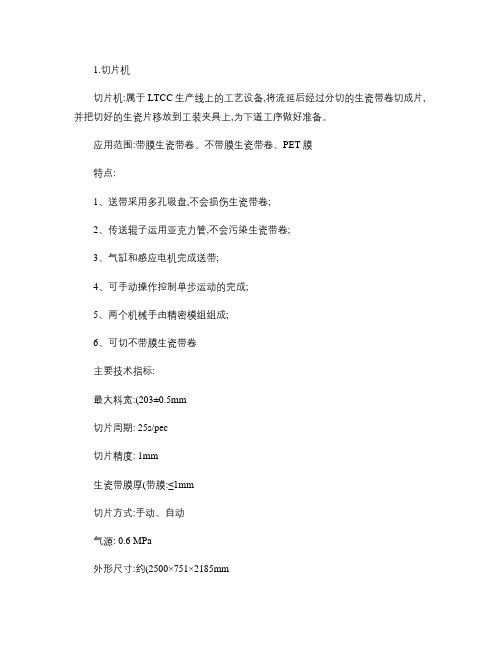
1.切片机切片机:属于LTCC生产线上的工艺设备,将流延后经过分切的生瓷带卷切成片,并把切好的生瓷片移放到工装夹具上,为下道工序做好准备。
应用范围:带膜生瓷带卷、不带膜生瓷带卷、PET膜特点:1、送带采用多孔吸盘,不会损伤生瓷带卷;2、传送辊子运用亚克力管,不会污染生瓷带卷;3、气缸和感应电机完成送带;4、可手动操作控制单步运动的完成;5、两个机械手由精密模组组成;6、可切不带膜生瓷带卷主要技术指标:最大料宽:(203±0.5mm切片周期: 25s/pec切片精度: 1mm生瓷带膜厚(带膜:≤1mm切片方式:手动、自动气源: 0.6 MPa外形尺寸:约(2500×751×2185mm2.生瓷带打孔机生瓷带打孔机:LTCC多层电路基板制造的关键设备,完成生瓷带通孔、定位孔和腔体的冲制成型。
应用范围:LTCC生瓷带、金属膜片特点:1 采用机械冲孔方式和无框工艺2 使用花岗岩作为基台,设备精度高3 双直线电机+气浮轴承+光栅尺的X-Y运动平台,设备运动灵活,高速高精度4采用CCD系统实现冲孔组件的自动定位和反冲图形的定位, 5可接受DXF格式图形文件6 自动上下料主要技术指标生瓷片规格203×203(mm最小孔径100μm最大加工厚度 1 mm最大加工速度600孔/分钟定位精度±5μm3.激光划切机激光划切机:LTCC多层基板制造工艺设备,主要负责完成生瓷带通孔、和异型腔体的成型应用范围:LTCC生瓷带、硅晶圆、陶瓷、蓝宝石、玻璃、薄膜电路、多层复合材料等材料的圆孔、方孔、半圆孔、异形孔等的划切,还可对特殊材料打标刻字。
特点:采用进口激光器、振镜、光学元件,以及运动、传动定位的导轨丝杠轴承,元器件性能可靠DXF图形文件格式输入接口,可实现排版、拼版加工自动上下料系统可选图像可实时显示加工效果,手动对准可以套刻各种图形主要技术指标:加工尺寸:210mm×210mm最小孔径:100μm加工效率:<3000 vias/min整体精度:<±15μm激光器功率:< 4 W聚焦光斑直径:20μm4.微孔填充机微孔填充机: LTCC多层基板制造工艺设备,通过挤压填充方式,对打孔后生瓷带通孔完成金属浆料填充,达到电气互联导通目的。
高精度复合轴跟踪控制系统

f x 30 ~ 50( Hz )
中国科学院光电技术研究所 2006.12
高精度复合轴跟踪控制系统
提高复合轴跟踪精度的措施
基于闭环特性的精跟踪镜系统宽带宽设计
2 2CL 2 KL G( s) s s 2 M ( s) J 2mc L J 2mc L2 一般K值都设计的较小,采用柔性弹性支撑的 结构,这样可大大减小音圈电机驱动的压力。
复合轴控制系统的实现
主轴由力矩电机驱动 高精度的转台实现, 用于捕获目标和粗跟 踪目标
子轴由音圈电机驱动高精度的快速反射 镜实现,用于高精度的跟踪和瞄准目标
中国科学院光电技术研究所 2006.12
高精度复合轴跟踪控制系统
复合轴控制系统的实现
FSM
E
粗探测器
精探测器
目标 探测 器
A
中国科学院光电技术研究所 2006.12
( s)
2
2
1
中国科学院光电技术研究所 2006.12
高精度复合轴跟踪控制系统
提高复合轴跟踪精度的措施
基于闭环特性的精跟踪镜系统宽带宽设计
dB (V/V) 22.0000 10.0000
中国科学院光电技术研究所 2006.12
高精度复合轴跟踪控制系统
提高复合轴跟踪精度的措施
基于闭环特性的精跟踪镜系统宽带宽设计
减小精跟踪视 场,提高精跟 踪CCD像元分 辨率
高精度复合轴跟踪控制系统
复合轴跟踪系统实验
中国科学院光电技术研究所 2006.12
高精度复合轴跟踪控制系统
结论
复合轴控制是实现大范围、高精度跟踪指标 的最有效的控制结构,在国内外高精度的跟 瞄系统中得到了广泛的应用 在精度要求特别高的系统,采取多级(3~4) 级联的复合轴控制结构,可实现更高的精度 指标(亚微弧度级)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3
题。
粗精动协同控制方法
试验台的粗精动协同控制主要考虑如下两个问
2
粗精动系统模型
(1) 粗动台和精动台的耦合问题。上下平台耦 合的强弱和系统的机械结构关系较大,比如式(1)、 (2)中,若 m1 ? m2 ,则 me→m2 ,此时 me − m2 =0 m2 (me s 2 + ξ s + k ) 由此可知,满足这种条件,则精动台对粗动台 的影响可以忽略。实际系统中,根据不同的结构设 计,有些系统可以只考虑单方向的耦合 [3],还有的 系统可以忽略耦合看成两个单输入单输出系统[4]。 当粗动台和精动台的耦合不可忽略时,考虑粗 动台和精动台的特点,这样的问题可以当作多个频 率段和多个控制输入间的解耦控制来处理,称为频 率分离控制。这种方法在磁盘驱动器的控制器设计 中研究和应用较多,实际上是通过多变量频域理论 对系统的闭环灵敏度函数进行频域整形,整形的方 法比较多,如 H8 、µ综合等方法都有应用[5-7]。根据 控制对象的特点,闭环的方式可能有所不同,但是 其闭环灵敏度函数的整形结果基本相同,即在低频 段系统的闭环灵敏度函数约等于粗动台闭环灵敏度 函数,高频段系统的闭环灵敏度函数约等于精动台 闭环灵敏度函数。频率分离方法对模型要求较为严 格,同时算法也比较复杂,尤其对于结构比较复杂 的大负载平台。 应该指出的是,耦合的考虑还与系统的输出变 量有关,对气浮工作台,当 ?、k 足够小时,式(1) 变为
20040916 收到初稿,20050307 收到修改稿
月 2006 年 4 月
宋亦旭等:高速高精度叠层直线运动控制系统
197
(2) 完成 50 µ s 为伺服周期的精动台控制。 (3) 传感器信号的采集,包括相对位置传感器 和激光干涉仪数据。 (4) 对粗精动运动控制进行协调,包括进行粗 动台的位置监控,以及把一些运动状态信号发送到 PMAC 运动控制卡等。 (5) 人机交互界面。 PMAC 运动控制卡能够同时进行 8 轴的控制, 用户不仅可以通过设置带宽等参数利用 PMAC 的 自整定获得性能良好的控制器,同时, Turbo PMAC 控制卡还具有一定的开放性,用户可以通过简单的 方式编写自己的控制算法。试验台的 Turbo PMAC 运动控制卡主要进行直线电动机控制,伺服周期 110 µ s, 通过双端口 RAM 从主控计算机获得每个伺 服周期的位置命令。同时,卡上还集成了光栅接口, 接收直线光栅尺位置反馈,并由 16 位 D/A 芯片向 直线电动机驱动器输出给定电流信号。
轨迹跟踪精度。②为宏机械臂提供阻尼,加快宏机 械臂的振动收敛。尽管从理论上讲,粗精控制可以 看成是宏/微控制的特例,尤其是考虑到冗余运动, 在惯量特性和动态一致性[1]等方面的分析可以很好 借鉴,但由于机械结构的不同,粗精协同控制考虑 的侧重有所不同,方法上也有自己的特点。 为了研究高速高精度直线运动的实现方法,首 先介绍了一个叠层试验台的硬件系统,然后分析了 叠层台的耦合问题和轨迹分配问题,并采用绝对空 间闭环方式实现试验台粗精动系统的轨迹跟踪控 制,最后给出了试验结果。
me (m2 s 2 + ξ s + k ) 2 2 m1 m2 s (me s + ξ s + k ) me (ξ s + k ) 2 2 m1 m2 s (me s + ξ s + k ) 式中 mm me = 1 2 m1 + m2
(3)
s——拉氏变换算子
式(2)变为
1
系统描述
试验台采用永磁直线电动机驱动粗动台,光栅 尺安装在台基表面, 光栅尺读数头安装在粗动台上, 用于测量粗动台的位移,粗动台总行程 300 mm。 音 圈电动机驱动精动台, 行程约 1 mm,粗动台与精动 台的相对位置由电涡流传感器测得。采用激光干涉 仪作为控制系统的全局位置检测元件,激光干涉仪 的反光镜安装在精动台上。传统的机械式导轨往往 受到摩擦和丝杠间隙等非线性因素的影响,这些不 确定性将影响到系统的控制精度,试验台的粗、精 两级平台均采用闭式气浮导轨。试验台的其他信息 可参见参考文献[2]。 系统的主控计算机使用 RTLinux 操作系统,其 主要功能如下。 (1) 实现粗精系统的运动轨迹规划,并通过双 端口 RAM 将规划数据传送给控制直线电动机的 PMAC 运动控制卡。
1 2 yc m1s = yf 0 −1 m1s 2 Fc 1 Ff m2 s 2
忽略系统的电磁时间常数,粗精动系统简化的 等效模型示意图见图 1。
ห้องสมุดไป่ตู้
图1 粗精动系统的等效模型示意图
图中
k ——耦合弹性系数 ?——阻尼比 F c,F f ——粗动台和精动台的驱动力 yc,yf ——粗动台和精动台的输出位置 m1 ,m2 ——粗动台和精动台的等效负载质量 易得系统的频域传递矩阵 yc (s ) y (s ) = f me − m2 2 m2 (me s + ξ s + k ) Fc (s ) me Ff ( s ) m2 (me s 2 + ξ s + k ) (1)
中图分类号:TP24 *
0
前言
随着制造业对加工精度和加工效率的要求不断 提高,高速高精度运动的实现成为精密制造领域关 键技术之一,比如磁盘伺服系统、大规模集成电路 的生产、微机电系统的制造与检测和细胞操作等。 高速高精度的运动系统的实现涉及到超精密机械设 计与制造、超精密运动控制和超精密检测等一系列 尖端技术。 由于加工水平和工艺等原因,大行程且精度高 的执行器的制造一直是一个比较困难的问题,许多 执行精度很高的器件其行程往往很小,比如音圈电 机 (Voice coil motor) 、 压 电 促 动 器 (Piezoelectric actuator)等。 利用双层台的叠层方式是实现大行程高 精度运动的一种有效方案,这种方法有效降低了执 行器的加工难度,实现成本也比较低。一般来讲, 下层台为粗动台,具有大行程的高速运动能力,上 层台为精动台,虽然行程较小,但具有高精度和高 频响的特点。 粗精叠层工作台在运动方向构成冗余。 叠层台可以用于精确定位,也用于轨迹跟踪, 根据控制对象及其应用场合不同,其机械结构形式 及粗精动协同控制(Coarse-fine control) 方案也有很 大的区别。在机器人系统中,对应多自由度的情况, 有宏/微操作臂,微机械臂一般安装在宏机械臂的末 端,构成冗余结构。宏机械臂由于杆件较长,往往 具有一定的柔性,微机械臂的作用主要有两方面: ①为系统提供更高带宽的精密运动,从而提高系统
第 42 卷第 4 期 2006 年 4 月
机
械
工
程
学
报
Vol. 42 A p r.
N o .4 2006
CHINESE JOURNAL OF MECHANICAL ENGINEERING
高速高精度叠层直线运动控制系统*
宋亦旭
1
王健发
2
杨开明
2
尹文生
2
朱
煜
2
贾培发
1
(1. 清华大学智能技术与系统国家重点实验室 北京 100084; 2. 清华大学精密仪器与机械学系 北京 100084)
Fj = J T Ft + [ I − J T J T# ]Fj0
置输出反馈设计的控制器解出, 可由式(5)解得, Fj = T T (F t – F cf, F t ) 或 Fj = ( F t+F cf, F t) ,这样,可以直接使 用相对传感器对 ycf 进行闭环调节,从防止精动台饱 和的角度看,直接控制精动台和粗动台的相对位置 可能更加有效,不过当机构本身比较复杂时,相对 位置传感器和直线电动机之间往往存在异置 (Noncollocated)问题, 结构柔性会影响粗动台的控制带宽。 另一种方法考虑在绝对空间闭环的条件下,精 动台位置输出即为系统的运动轨迹,此时粗动台的 运动轨迹为 yd – ef 可保证精动台处于最佳相对位 置,其中 yd 表示期望轨迹,e f 为精动台跟踪偏差。 试验台用这种方法进行试验。相对于粗动台的运动 能力,ef 通常可以忽略,同时 e f 的引入会给直线电 动机控制系统带来额外的高频噪声,此时粗动台以 光栅尺为反馈器件进行局部闭环, 跟踪轨迹 yd 即可。 另外从试验台使用的电涡流传感器和光栅尺的输出 信号看,后者输出的信噪比也相对较好。 试验台利用激光干涉仪输出作为全局位置反 馈,绝对空间闭环控制器采用极点配置方法,依靠 精动台实现高带宽高精度的跟踪和定位;粗动台跟 踪精动台,保证精动台不饱和,精动台对粗动台的 力扰动可以通过增强粗动台控制器的鲁棒性来解 决,驱动粗动台的直线电动机采用 PID 控制器。在 精动台的驱动系统非线性影响较弱时,这种方法可 以适当放宽粗动台的稳态跟踪精度,同时不要求高 精度的相对位置传感器。 由于音圈电动机响应较快,在加减速段,应尽 量加快直线电动机的响应速度,此时在直线电动机 控制器中加入加速度前馈项调整粗精动台的相互位 置,防止精动台饱和的发生。
摘要:在分析粗精动控制系统的耦合及轨迹分配等问题的基础上,介绍叠层试验台高速高精度直线运动的实现: 采用永磁直线交流电动机驱动粗动台,粗动台行程大但带宽较低;音圈电动机驱动精动台,精动台带宽高但行程 较小。用绝对空间闭环方式实现试验台的粗精运动控制,这种方法可以忽略粗动台对精动台的惯性力扰动,精动 台直接跟踪给定轨迹,粗动台跟踪精动台的运动轨迹防止精动台发生运动饱和。试验结果表明,精动台显著提高 了系统的定位和跟踪精度,该控制方法使叠层试验台的高速高精度运动得以方便实现。 关键词:叠层台 粗精控制 轨迹跟踪
根据式(1),可得 yc (s ) y (s ) = cf me (m2 s 2 + ξ s + k ) 2 2 m1 m2 s (me s + ξ s + k ) −me 2 m1 (m e s + ξ s + k ) 式中 me − m2 2 m2 (me s + ξ s + k ) Fc (s ) 1 Ff ( s ) me s 2 + ξ s + k (2) ycf ——精动台相对粗动台的位移