城市轨道交通全自动运行车辆系统关键技术研究与应用
城市轨道交通全自动运行综合监控系统关键技术

20
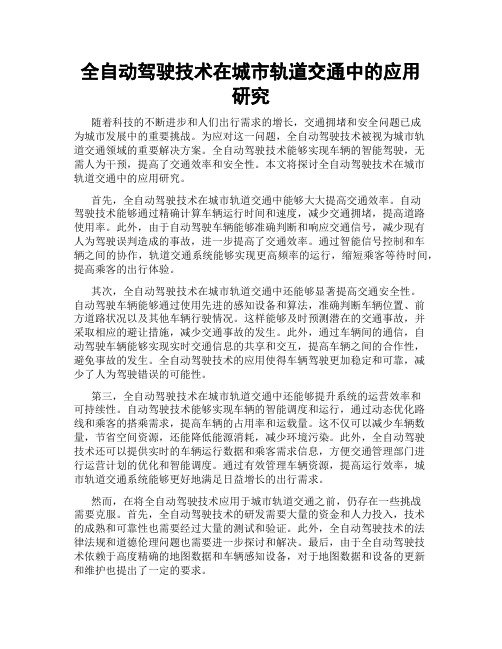
三、以行车指挥为核心的综合监控系统方案
21
3、以行车指挥为核心的综合监控系统方案
行车综合自动化系统概念 行车综合自动化系统TIAS( Traffic Control Integrated Automation System )通过建
立统一的数据库、应用软件及人机界面平台,将各专业间的数据高度融合,减少了命令
二、全自动运行系统关键技术介绍
7
2、全自动运行系统关键技术介绍
全自动运行系统通过高度集成化、信息化以及智能化列控系统来替代司机需要完成的 各项工作,其核心设备系统主要包括全自动运行的行车综合自动化系统、信号系统、车 辆段系统、通信系统及车地无线综合承载系统。与传统地铁运行系统相比,控制中心增 加乘客调和车辆调,全自动运行区域增加区间视频监控和工作人员防护开关,列车增加 车头摄像头、乘客紧急呼叫和障碍物检测等。
Ø 列车上无需配备人员 Ø 列车自动运行,并管理车门的开关 Ø 中心与乘客交流
1、全自动运行系统的定义
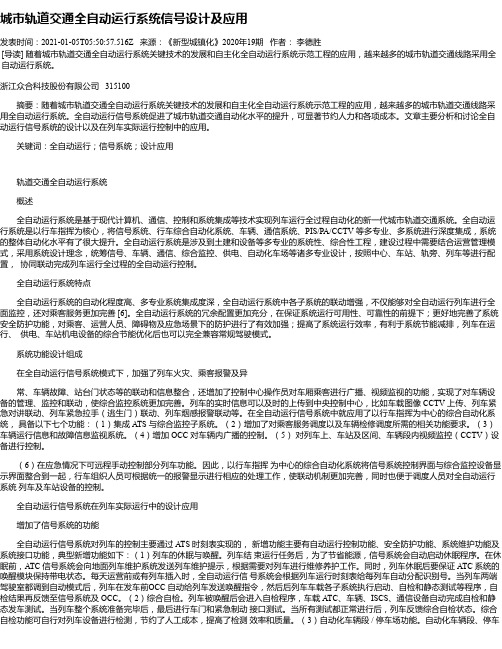
GOA3( DTO )与GOA4( UTO )的配置差异:
运输管理基本功能
GOA 3(DTO)
安全进路
S
列车安
列车间隔控制
S
全运行
速度监控
S
列车驾驶
加速和减速
S
障碍物监测
S
轨道监测
避免与轨道上的人员碰撞
2、全自动运行系统关键技术介绍
司机驾驶操作任务模式
使命
在全自动运行 系统中,司机的职 责被系统自身和控 制中心承担,因此 通过对司机作业任 务的分析,将司机 作业任务充分分解 到各个核心设备系 统和控制中心中。
过程 功能 任务
发车
确 认 发发 启 车车 动 提准 列 示备 车 信 息
全自动驾驶技术在城市轨道交通中的应用研究
全自动驾驶技术在城市轨道交通中的应用研究随着科技的不断进步和人们出行需求的增长,交通拥堵和安全问题已成为城市发展中的重要挑战。
为应对这一问题,全自动驾驶技术被视为城市轨道交通领域的重要解决方案。
全自动驾驶技术能够实现车辆的智能驾驶,无需人为干预,提高了交通效率和安全性。
本文将探讨全自动驾驶技术在城市轨道交通中的应用研究。
首先,全自动驾驶技术在城市轨道交通中能够大大提高交通效率。
自动驾驶技术能够通过精确计算车辆运行时间和速度,减少交通拥堵,提高道路使用率。
此外,由于自动驾驶车辆能够准确判断和响应交通信号,减少现有人为驾驶误判造成的事故,进一步提高了交通效率。
通过智能信号控制和车辆之间的协作,轨道交通系统能够实现更高频率的运行,缩短乘客等待时间,提高乘客的出行体验。
其次,全自动驾驶技术在城市轨道交通中还能够显著提高交通安全性。
自动驾驶车辆能够通过使用先进的感知设备和算法,准确判断车辆位置、前方道路状况以及其他车辆行驶情况。
这样能够及时预测潜在的交通事故,并采取相应的避让措施,减少交通事故的发生。
此外,通过车辆间的通信,自动驾驶车辆能够实现实时交通信息的共享和交互,提高车辆之间的合作性,避免事故的发生。
全自动驾驶技术的应用使得车辆驾驶更加稳定和可靠,减少了人为驾驶错误的可能性。
第三,全自动驾驶技术在城市轨道交通中还能够提升系统的运营效率和可持续性。
自动驾驶技术能够实现车辆的智能调度和运行,通过动态优化路线和乘客的搭乘需求,提高车辆的占用率和运载量。
这不仅可以减少车辆数量,节省空间资源,还能降低能源消耗,减少环境污染。
此外,全自动驾驶技术还可以提供实时的车辆运行数据和乘客需求信息,方便交通管理部门进行运营计划的优化和智能调度。
通过有效管理车辆资源,提高运行效率,城市轨道交通系统能够更好地满足日益增长的出行需求。
然而,在将全自动驾驶技术应用于城市轨道交通之前,仍存在一些挑战需要克服。
首先,全自动驾驶技术的研发需要大量的资金和人力投入,技术的成熟和可靠性也需要经过大量的测试和验证。
城市轨道交通全自动运行系统信号设计及应用
城市轨道交通全自动运行系统信号设计及应用发表时间:2021-01-05T05:50:57.516Z 来源:《新型城镇化》2020年19期作者:李德胜[导读] 随着城市轨道交通全自动运行系统关键技术的发展和自主化全自动运行系统示范工程的应用,越来越多的城市轨道交通线路采用全自动运行系统。
浙江众合科技股份有限公司 315100摘要:随着城市轨道交通全自动运行系统关键技术的发展和自主化全自动运行系统示范工程的应用,越来越多的城市轨道交通线路采用全自动运行系统。
全自动运行信号系统促进了城市轨道交通自动化水平的提升,可显著节约人力和各项成本。
文章主要分析和讨论全自动运行信号系统的设计以及在列车实际运行控制中的应用。
关键词:全自动运行;信号系统;设计应用轨道交通全自动运行系统概述全自动运行系统是基于现代计算机、通信、控制和系统集成等技术实现列车运行全过程自动化的新一代城市轨道交通系统。
全自动运行系统是以行车指挥为核心,将信号系统、行车综合自动化系统、车辆、通信系统、PIS/PA/CCTV 等多专业、多系统进行深度集成,系统的整体自动化水平有了很大提升。
全自动运行系统是涉及到土建和设备等多专业的系统性、综合性工程,建设过程中需要结合运营管理模式,采用系统设计理念,统筹信号、车辆、通信、综合监控、供电、自动化车场等诸多专业设计,按照中心、车站、轨旁、列车等进行配置,协同联动完成列车运行全过程的全自动运行控制。
全自动运行系统特点全自动运行系统的自动化程度高、多专业系统集成度深,全自动运行系统中各子系统的联动增强,不仅能够对全自动运行列车进行全面监控,还对乘客服务更加完善 [6]。
全自动运行系统的冗余配置更加充分,在保证系统运行可用性、可靠性的前提下;更好地完善了系统安全防护功能,对乘客、运营人员、障碍物及应急场景下的防护进行了有效加强;提高了系统运行效率,有利于系统节能减排,列车在运行、供电、车站机电设备的综合节能优化后也可以完全兼容常规驾驶模式。
城市轨道交通全自动运行系统及安全需求

城市轨道交通全自动运行系统及安全需求闫宏伟;燕飞【摘要】结合国内外全自动运行系统的运营研究资料,介绍国际轨道交通全自动运行系统发展状况,探讨全自动运行系统的功能结构.结合IEC62267与IEC62290等国际标准,论述全自动运行系统典型的系统功能与安全需求.以系统FAM与CAM 模式转换为例,对运营场景进行分析研究,如实反映列车全自动驾驶系统真实的运营过程,在建模之前需对系统的功能进行梳理,实现需求到场景的追踪,以确保所建模型与功能需求的一致性,即此模型表达系统最终需要完成哪些功能,这些功能之间的关系如何以及系统完成这些功能需要与哪些外部参与者或系统实现交互.对全自动运行系统展开深入而全面的研究,对我国自主研发全自动运行系统提出参考建议,为全自动运行系统的安全运营保驾护航.%This paper discusses the development and function structure of automatic operation system for international rail transit by using the operation and research data of the system at home and abroad.It examines the typical automatic operation system and security requirements in line with IEC62267 and IEC62290 and other international standards.By taking the mode transfer of FAM and CAM system as an example,the operational scenarios are analyzed and the real operation process of the automatic driving system is reflected.The function of the system needs to be reviewed before modeling to meet the demand of the scene,which can guarantee the consistency between modeling and functional requirements.Specifically,the following aspects should be considered:what functions the model expression system should perform,what the relationship between these functions is and whatexternal actors or systems are needed to interact with for these systems to complete their functions.In-depth and comprehensive study of the whole automatic operation system is needed for research and for the development of independent system design in China.【期刊名称】《都市快轨交通》【年(卷),期】2017(030)003【总页数】7页(P50-55,87)【关键词】城市轨道交通;全自动运行系统;安全需求【作者】闫宏伟;燕飞【作者单位】中国铁路经济规划研究院,北京100038;北京交通大学电子信息工程学院,北京100044【正文语种】中文【中图分类】U231.6随着城市化进程的不断加速以及城市人口爆发式的增长,交通运输成为亟待解决的问题。
宁波轨道交通5号线一期工程智慧城轨技术的研究与应用
宁波轨道交通5号线一期工程智慧城轨技术的研究与应用摘要:在新一轮科技革命和产业变革蓬勃兴起的背景下,建设智慧城轨已成为当前行业的发展共识和发展趋势。
面对新形势、新任务、新要求,宁波轨道交通以建设浙江省首条全自动运行线路5号线一期为契机,逐步勾勒具有宁波轨道交通特色的智慧城轨发展蓝图,以智慧城轨建设引领宁波轨道交通高质量发展。
本文从宁波轨道交通智慧城轨规划、智能列车运行、智慧车站、智能能源系统、相适应的组织架构调整等方面进行了研究阐述。
关键词:城市轨道交通;智慧城轨1引言2020年3月,中国城市轨道交通协会编制发布《中国城市轨道交通智慧城轨发展纲要》,推动着行业整体向智慧时代迈进。
建设智慧城轨已成为当前行业的发展共识和发展趋势。
面对新形势、新任务、新要求,宁波轨道交通以建设浙江省首条全自动运行线路5号线一期为契机,逐步勾勒具有宁波轨道交通特色的智慧城轨发展蓝图,以智慧城轨建设引领宁波轨道交通高质量发展。
2 宁波轨道交通智慧城轨发展蓝图宁波轨道交通按照“安全、便捷、高效、绿色、经济”的原则,以解决轨道交通行业难点痛点为目的,以实际业务需求为导向,编写制定了《宁波轨道交通智慧城轨顶层设计规划》,并于2021年4月顺利通过中国城市轨道交通协会专家的评审。
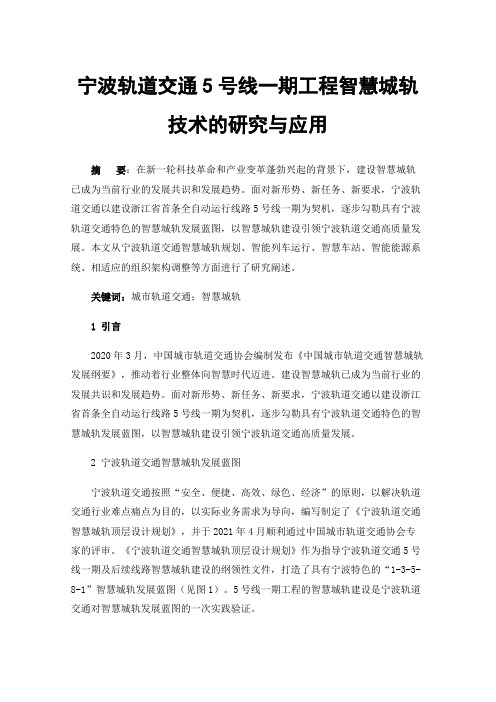
《宁波轨道交通智慧城轨顶层设计规划》作为指导宁波轨道交通5号线一期及后续线路智慧城轨建设的纲领性文件,打造了具有宁波特色的“1-3-5-8-1”智慧城轨发展蓝图(见图1)。
5号线一期工程的智慧城轨建设是宁波轨道交通对智慧城轨发展蓝图的一次实践验证。
图1 宁波轨道交通智慧城轨发展蓝图3 构建智能列车运行新模式3.1全自动运行列车控制关键技术5号线一期工程是浙江省首条按照GoA4等级开通运营的全自动运行线路,也是由宁波轨道交通自主设计运营场景、自主联调联试、自主组织试运行的首条全国产化线路。
列车智能化程度、环境感知能力、故障自愈能力大幅度提升。
以全自动运行信号控制系统、列车障碍物主动探测系统和站台门与列车间隙异物检测系统为核心,实现自动唤醒、自检、自动洗车、自动出库、自动回库等功能,满足108项全自动运行场景应用要求。
全自动运行系统地铁车辆技术

1 概况地铁车辆全自动运行是指负责运营管理的过程从司机轮换到车辆的唤醒、休眠、起停、开关门、车速控制等一系列车辆控制的自动化执行。
自动化有不同程度的自动化等级,根据列车运行的基本功能是由员工还是系统进行实现并承担责任来区分。
例如:GOA0等级对应于由司机观察操作有轨电车在公路上行驶;GOA4等级对应于车辆不靠司机的完全自动运行,也被称为全自动运行系统。
全自动运行系统地铁车辆技术的发展经历了概念形成、技术储备、尝试性应用和蓬勃发展4个阶段。
1965年,美国西屋电气公司率先提出建设“无人驾驶的、高频率的、经济的公共交通系统”;1968年,英国Victoria L in e成为世界第1条GO A2等级的线路;1970年,北美首条全自动运行系统“Morgantown PRT”开建,并于1975年投入运营;1983年,里尔地铁1号线开通运营,该线路的VAL系统是第1条真正意义上的全自动无人驾驶中运量系统;1985年,美国西屋电气公司在迈阿密 Metro Mover(APM)实现了全自动运行系统;1986年,温哥华SkyTrain全长21.4 km的全自动运行系统线路开通运营;1998年,采用全自动运行系统的巴黎地铁14号线开通运营,成为第1条应用于大城市轨道交通地铁干线的全自动运行系统线路;2003年6月20日,新加坡东北线开通运营,成为第1条采用钢轮钢轨制式大运量的全自动运行系统线路。
在我国,采用自主化车辆与调度控制系统实现全自动运行系统的应用正处于探索阶段。
北京机场线是国内首条引入全自动运行系统的线路,上海地铁10号线是国内首条按照GOA4等级建设的全自动运行系统线路。
国内车辆厂家通过参与新加坡汤申线、中国香港南港岛线等项目的全自动运行系统车辆研制,取得了一定的技术储备,已经具备开展自主化的适应于全自动运行系统车辆的研制条件。
北京机场线和上海10号线采用阿尔斯通全自动运行系统信号系统,其调度控制系统涉及的信号系统与综合监控系统相对独立,在国内适用于全自动运行系统的调度控制系统仍然停留在列车自动监控系统层面,尚未实现列车自动监控与机电、车辆等其他系统的高度集成及直接面向车辆、乘客的调度控制及整个运营设备维修信息的综合处理。
城市轨道交通全自动运行运作研究 开题报告
城市轨道交通全自动运行运作研究开题报告研究背景、目的与意义1.研究背景随着科学技术和社会经济的快速发展,城市化进程日益加快,城市交通得到迅猛发展。
但是,伴随着城市交通发展所出现的一系列问题却也成为制约城市发展的重要因素。
然而,城市轨道交通的出现有效地缓解了城市交通快速发展而引起的地面交通拥堵和环境污染等问题。
因为相比传统的交通运输方式,城市轨道交通具备运量大、速度快、安全可靠、准时、稳定性高、占地面积少、环保节能、舒适性高等多方面的优势,它己成为解决日趋严重的城市交通问题的最佳选择。
城市轨道交通系统是一个复杂而庞大的系统,对其控制系统的要求非常高,轨道交通列车高效率、高密度的运行是其控制系统的重点研究目标。
列车全自动运行系统采用了许多重要的科学技术,它可以最大程度的确保列车运行安全,缩短行车间隔,提高运输效率,减轻运营人员的劳动强度,并已成为城市轨道交通运行控制系统中最重要的组成部分。
2.研究目的与意义全自动运行系统融入了高度自动化控制、人因工程与通信等多领域的新技术,进而提升轨道交通的自动化程度。
与上一代列控技术相比较,其主要特色功能包括列车自动上电唤醒自检,全自动车辆段,自动行驶、停车和开关车门,故障自动恢复,自动清洗与自动断电休眠等。
具备常规运行、降级蠕动运行、雨雪运行、中断运行等多样化运行模式。
可以根据运营需求配备值守人员或者不配备值守人员。
除了可以实现无人驾驶,一般也会相应配置以行车为核心的高度集成的信号系统与综合监控系统,以解决没有司机或值守人员所引入的危险。
随着全自动运行系统研发与应用,系统不仅仅涉及单一的列车、车载系统,而是一个复杂的社会技术系统,传统的趋于硬件的安全技术手段更注重于失效,不能充分的解决这些新出现的致因。
同时,人的角色由原来的直接控制转化为自动化的监控,使得人为决策需要更加复杂的感知。
因此,寻找有效的轨道交通系统安全分析方法配合安全分析活动以保障系统安全性成为亟待解决的问题。
城市轨道交通全自动驾驶车站方案研究 ---以南京地铁7号线为例
工程技术
城市轨吴伟涛
摘要 南京地铁 ! 号线是南京市第一条全自动驾驶线路!与 传统的有人驾驶线路相比!从系统模式"设备车辆"车站方案及管 理模式等很多方面都有很大区别!行车更为智能高效!管理更为 精细!安全要求更高# 全自动驾驶系统的重点在于车辆自动运行 和信号通信为主的自动控制与监控系统!而作为乘客集中使用的 车站却关注不多$ 本文从地铁系统中的重要一环的车站出发!基 于全自动驾驶的特性!考虑安全%高效和合理的要求!研究地铁车 站在建筑设计方面所应具备的应对措施!从而提出地铁车站在全 自动驾驶模式下在站台层设置应急处置室"站台层设备区临轨行 区侧走道完全隔离和存车线快速撤离通道的&车站三标准'处置 方案$
图 6+自动驾驶等级划分
相比传统的有人驾驶模式!全自动驾驶可以实现列车启停行 驶"清洗和相关设备设施的全自动化运行有效提高运量和系统运 行效率!启停自动控制!列车行驶更为均匀顺畅!乘客乘坐更为舒 适!同时因为自动化程度高!可节省人力"物力!虽然初期建设成 本较高!但后期维护成本低!降低了运营成本$
二国内外全自动驾驶发展现状 全自动驾驶系统在国内外有很多运营案例!世界范围内已有 :- 余 条 $ 国 外 全 自 动 驾 驶 线 路 运 营 里 程 比 较 多 的 是 新 加 坡 ,,4%&-"迪拜,;-%&-和温哥华,+;%&-$ 国内!/-3+ 年底开通运营 的 香 港 南 港 岛 线 是 我 国 第 一 条 正 式 运 营 的 0125 等 级 的 全 自 动 驾驶线路!全线设 # 座 车 站 $ /-3! 年 开 通 的 北 京 燕 房 线 和 上 海 ; 号线三期是大陆区域的全自动驾驶线路!但两线均为 < 型车 = 辆 编组!针对的是客流量较小的情况!其中北京燕房线设站 , 座!上 海 ; 号线三期为胶轮 2>? 捷运系统!设站 + 座$ 三南京地铁 号线的特征 南京地铁 ! 号线为大运量骨干线路! 采用 < 型车 + 辆编组! 线路长!车站多!客流大$ 大客流的运营条件!对全自动驾驶在运 营安全"效率"管理等方面的要求更高!国内并没有同运量等级的 全自动驾驶线路可供参考$ 四南京地铁 号线全自动驾驶车站建筑方案 全 自 动 驾 驶 对 车 站 建 筑 的 要 求 首先!列车全自动驾驶的运营安全是第一位的!必须保证运 行区域严格无人$ 全区段严格划分为无人区和有人区$ 无人区是 列车全自动行驶的区域! 有人区是有工作人员驻守或操作的区 域$ 对车站来说!轨行区为无人区!其他区域为有人区!两者必须 完全隔离!在相通处需设置信号连锁以识别工作人员是否进入或 离开无人区!从而自动控制列车的运营和停止$ 其次!为了保证突发事故!在需要人为处置的情况下!车站驻 守工作人员必须马上判断事故情况和迅速赶到事故地点!以便以 最短的时间解决突发事件!尽快回复列车运营$ 第三!对于故障列车在处置工作人员的人工干预下!应就近 把列车驶往最近的车站存车线!同时处置工作人员需要尽快撤离 处轨行区!恢复无人区的无人状态!以便马上恢复列车的全自动 运行$ 车 站 建 筑 设 计 应 对 方 案 全自动驾驶的上述要求!反映到车站建筑设计上就需要有相 应的应对方案$ 首先!是无人区严格无人的功能要求+对应无人行驶区完整 隔离方案 地铁车站无人区和有人区的分界面在站台层!公共区部分分 界物是站台门!设备区部分是临轨行区侧走道的分隔栏杆$ 但传 统有人驾驶车站站台层设备区侧走道的护栏高 ,--&&!仅能 对 在 设备区检修" 巡视操作的工作人员起到基本的安全防护作用!且 下轨行区楼梯处为开放式设计!不能作为无人区和有人区的隔离 措施$ 南京 ! 号线针对这种要求!车站建筑设计做了特殊研究$ 车 站站台层设备区走道靠轨行区一侧设置不锈钢编织金属网防护 隔离栏!高度 3@;&!将轨行区与设备区分隔$ 走道端部下轨行区楼 梯 处 设 3A;& 高 隔 离 门 ! 并 设 门 禁 "**7B 摄 像 机 ! 该 处 门 禁 与 **7B 及 C>DC 联动$ 安全隔离栏高度设为 3A;& 考虑有两个考虑+ 一个是在设备区操作的工作人员经过专业的严格培训!有很强的 安全意识!二是隔离栏高度超过了人的高度!攀爬有较大困难!同 时高出人视线的高度在心理上进一步暗示了隔离护栏的隔离作 用!这两个方面保证了隔离护栏的隔离效果!从而无需做全高护
城市轨道交通全自动运行系统分析
城市轨道交通全自动运行系统分析一全自动运行系统现状(一)全自动运行系统的概念及发展过程1.全自动运行系统的发展过程国外全自动运行系统的运营发展过程是循序递进的。
1983年法国里尔开通了世界上第一条全自动运行系统的城轨线路,1998年法国巴黎14号线首次实现了无人值守,2003年新加坡东北线开通,标志着全自动运行系统在大运量的地铁中应用(见表1)。
|Excel下载表1 国外全自动运行系统发展过程2.全自动运行系统及自动化等级全自动运行系统是基于现代计算机、通信、控制和系统集成技术,由信号、车辆、综合监控、通信、站台门等与列车运行相关的设备组成,实现列车运行全过程自动化的系统。
根据中国城市轨道交通协会发布的团体标准《城市轨道交通全自动运行系统规范第1部分:需求》(T/CAMET 04017.1-2019),我国城市轨道交通不同运行自动化等级包括GoA0(人工驾驶运行模式)、GoA1(非自动化驾驶运行模式)、GoA2(半自动化驾驶运行模式)、GoA3(无人驾驶运行模式)、GoA4(无干预运行模式),其中全自动运行系统包含自动化等级GoA3、GoA4,即全自动运行系统的运行模式包括有人值守下的列车自动运行(Driverless Train Operation,简称DTO)和无人值守下的列车自动运行(Unattended Train Operation,简称UTO)。
3.全自动运行系统的主要特点全自动运行系统将列车司机执行的工作完全由自动化的、高度集中控制的列车运行系统完成,实现了行车计划自动匹配、列车自动唤醒、自检、列车自动出入库、列车自动运行及停站、自动开关车门/站台门、列车自动折返、列车自动回库休眠、自动洗车等主要功能,具有常规运行、降级运行和灾害工况等多种运行场景。
全自动运行系统实现了列车的全自动运行,关键运行设备采用了冗余技术,同时又具备状态自检测和故障自诊断等功能,不仅能够减少大量的人工操作,降低劳动强度,提高运营效率,而且能够提升系统可靠性,具备更高的可用性、安全性,受到了全球各个城市轨道交通运营商的青睐。
轨道交通全自动运行系统FAO的实践应用
轨道交通全自动运行系统FAO的实践应用随着城市化进程的加速,城市交通拥堵问题日益严重,轨道交通作为一种高效、便捷、大运量的公共交通方式,得到了越来越广泛的应用。
为了进一步提高轨道交通的运行效率和安全性,全自动运行系统(FAO)应运而生。
FAO 系统是一种基于现代信息技术和自动化控制技术的轨道交通运行模式,它实现了列车的自动驾驶、自动监控、自动调度等功能,极大地提高了轨道交通的运行水平和服务质量。
本文将对轨道交通全自动运行系统 FAO 的实践应用进行详细介绍。
一、FAO 系统的构成及工作原理FAO 系统主要由列车自动监控系统(ATS)、列车自动驾驶系统(ATO)、列车自动保护系统(ATP)和计算机联锁系统(CBI)等组成。
ATS 系统负责对列车的运行进行监视和控制,它可以根据列车的运行计划和实时运行状态,自动调整列车的运行速度和停站时间,确保列车按照预定的时刻表运行。
ATO 系统则根据 ATS 系统的指令,自动控制列车的加速、减速和停车,实现列车的自动驾驶。
ATP 系统是列车运行的安全保障系统,它通过对列车的速度、位置和运行状态进行实时监测,确保列车在运行过程中不超速、不冒进、不追尾,保证列车的运行安全。
CBI 系统则负责对轨道区段、道岔等信号设备进行控制和联锁,确保列车的运行路径安全可靠。
FAO 系统的工作原理是通过车载设备和轨旁设备之间的信息交互,实现对列车的自动控制。
车载设备包括传感器、控制器、通信设备等,它们可以实时采集列车的运行状态信息,并将这些信息发送给轨旁设备。
轨旁设备则根据车载设备发送的信息,结合线路的运行条件和列车的运行计划,生成控制指令,并将这些指令发送给车载设备,从而实现对列车的自动控制。
二、FAO 系统的优势1、提高运行效率FAO 系统实现了列车的自动驾驶和自动调度,减少了人为因素对列车运行的影响,能够更加精确地控制列车的运行速度和停站时间,从而提高列车的运行效率,缩短列车的行车间隔,增加线路的运输能力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
脱轨诊断
TCMS 系统
制动 系统
二、车辆安全监测解决方案
(二)障碍物检测技术
Ø 采用多传感器融合方案: 1. 灵活适应不同应用场景
a) 正常场景:以视频为主,激光毫米波、毫米波为辅; b) 低照度场景:以激光为主,毫米波视频、视频为辅; c) 雾霾沙尘:以毫米波为主,激光视频、视频为辅。 2. 异构传感器融合,可提升检测的可靠性和准确率 a) 检测结果不依赖单一传感器,提升可靠性; b) 同一障碍物经异构传感器检测并多层融合,提高结果的
一、车辆控制系统可靠性解决方案
(三)人工远程介入
远程控制
ü监控视频、数据支持+OCC可视化终端 ü人工介入+完善的安全处理预案 ü主动启用,快速解决
综合监控
控制联动
TCMS
ATC
远程人工投入 ü逃生门旁路 ü 门关好旁路 ü零速旁路 ü障碍物监测及脱轨监测旁路 ü网络硬线开门 üLCU强制A、B组 ü升弓允许旁路 ü蠕动模式
Ø减少人工介入选择; Ø减少人为介入失误; Ø减少操作流程,提升效率。
智能 诊断 系统
3、正线故障应急 处理程序
4、故障自主处理
一、车辆控制系统可靠性解决方案
(二)车辆故障自动处理技术——实现方案 Ø对故障应急场景进行研究分析,结合成熟的正线故障处理流程等,通过智能控制系统的内部程序 实现空开自动复位、旁路功能自动激活、子系统自动软重启和列车自动重启等功能。
备用模式
p在ATP切除下,解决列车控制系统发生 严重故障导致无法动车问题; p通过人工远程/本地启用该模式电路, 实现快速退出服务功能。
一、车辆控制系统可靠性解决方案
(二)车辆故障自动处理技术
1.实现故障运营场景下的快速、高效、准确的故障自动处置功能: 2.依托智能诊断系统,将故障识别、判断、处置等全流程处置工作交由系统本身来完成实现; 3.预设故障应急处置模型和程序,减少正线列车故障处置的人为介入环节。
GOA4 高可靠性
一、车辆控制系统可靠性解决方案
(一)控制全冗余
1、抓关键核心,梳理并解决11个列车级关键信号传输失效引起无法动车的行业痛点。
序号
1 2 3 4 5 6
牵引边界条件信号
列车激活控制(低压) 受流控制(高压) 风源控制(风压) 司机室激活 列车方向 牵引制动指令
高低压电源和风源 控制
(一)控制全冗余:
(1)传输介质冗余——通信网络冗余 “通信设备冗余+总线冗余”,实现设备、总线单点故障不影响列车通信。
#MVB通信网络
ü A、B双通道、双通道独立的MVB连接器 ü 每车设置冗余的RPT中继器 ü VCU、DX、AX配置冗余
#实时以太网环网
ü 采用环网结构 ü 容错型交换机 ü 安全数据校验机制
障碍物检测
蓄电池在线监测
脱轨监测
走行部监测
二、车辆安全监测解决方案
(一)脱轨监测技术—采用振动冲击检测方案 通过车辆跌落位移和大冲击的时域特征分析,实现脱轨的判断和主动实施紧急制动保护
车轮跌落振动 车轮撞击轨道振动冲击
采用振动冲击检测,规避了脱落风险, 与走行部监测系统复用传感器,简化装 车工程。
功能最终实现的末端
可靠、安全、高效与智能
目录
一、车辆控制系统可靠性解决方案
三、车辆智能运维解决方案
二、车辆安全监测解决方案
四、车辆关键技术展望
PART.1
车辆控制系统可靠性 解决方案
一、车辆控制系统可靠性解决方案
为实现FAO可靠性,车辆控制系统顶层设计应达到以下3个目标:
控制全冗余
故障全自动处理 人工远程介入
城市轨道交通全自动运行系统 车辆关键技术研究与应用
2019年轨道交通大会
全自动运行系统FAO:
北京机场线
前言
上海10号线
香港南岛线
2008.07
2010.04
Ø 轨道交通发展的方向和必然趋势 Ø 多专业组成的复杂系统工程 Ø 安全与可靠、高效与智能
ቤተ መጻሕፍቲ ባይዱ
2016.12
北京燕房线
2017.12
前言
+ 车辆= 全自动运行系统执行的载体
一、车辆控制系统可靠性解决方案
(一)控制全冗余: (1)传输介质冗余——硬线控制电路冗余 采用2*2oo2 高冗余架构LCU,实现车辆控制功能和全面提升可靠性。
Ø采用光耦、MOS场效应管等高可靠电子器件; Ø引入2*2oo2多组比较技术; Ø采用状态自检、表决诊断、故障隔离技术; Ø故障组切换≤16ms ,满足自动无缝切换要求; Ø具备实时数据监测记录、实现故障智能诊断,打造数字化列车; Ø安全完整度达SIL4,与信号系统相匹配。
四套系统同时工作,分两系互为热备;
2*2oo2 单系中必须双机一致时才输出;
电源、输入、运算、输出等逐级二乘二取二;
一、车辆控制系统可靠性解决方案
(一)控制全冗余:
(2)降级模式冗余
设置降级控制模式 ,使故障列车快速退出服务,有效减小故障对全自动运行系统运营的影响。
蠕动模式
p在ATP保护下,解决车辆与车载信号 接口故障; p通过远程人工确认后启动该模式,实 现限速运行至下一站退出服务功能。
可探测距离 131米 110米
限速 62km/h 62km/h
紧急制动距离 123米 123米
是否满足 是 否
二、车辆安全监测解决方案
本地人工投入 u救援模式 u ATC切除 u备用模式 / / / / /
PART.2 车辆安全监测解决方案
二、车辆安全监测解决方案
车钩脱钩; 车门安全环路; 走行部振动; 火灾、高压箱盖; 电气短路等多项检测;
车门在线检测 弓网检测
蓄电池在线监测
走行部振动监测
二、车辆安全监测解决方案
防撞系统
车门在线检测 弓网检测
控制电路 (LCU)
√ √
√ √ √
网络 牵引 制动
√
√
√
√
√
√
√
关键控制
信号
一、车辆控制系统可靠性解决方案
(一)控制全冗余
2、以终为始,重点实现传输介质冗余和降级模式冗余。
(1)传输介质冗余
Ø 通信网络 Ø 硬线电路
(2)正常与降级模式冗余
Ø 蠕动模式 Ø 备用模式
一、车辆控制系统可靠性解决方案
置信率和准确率。 3.考虑到全寿命成本,激光的工程应用尚不成熟,待进一步跟踪 产品成熟度发展。
二、车辆安全监测解决方案
(二)障碍物检测技术—弯道分析
视频、雷达等无 法弯转来有效感 知,主要依靠等 效视距内检测; 弯道的等效视距 小于直道,障碍 物检测更加困难。
深圳地铁3号 线测算数据
转弯半径 500米 350米