4-SPS(PS)并联机构模糊自适应滑模控制系统设计
液压伺服系统中模糊-滑模控制器的设计及应用
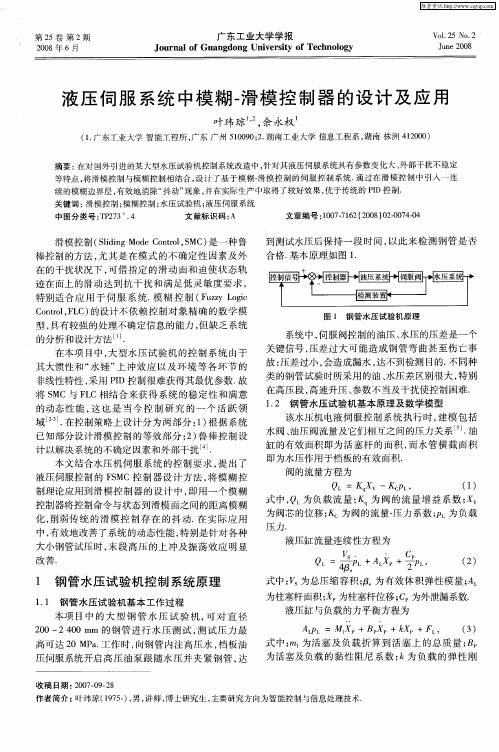
图 1 钢 管水压试 验机原 理
系统中, 伺服 阀控 制 的油压 、 水压 的压 差是 一个 关键 信 号 , 差 过 大可 能 造 成 钢 管弯 曲甚 至 伤 亡 事 压
故; 压差 过小 , 会造 成漏 水 , 达不 到检测 目的. 同种 不
1 钢 管 水 压 试 验 机 控 制 系统 原 理
1 1 钢管 水压 试 验机基 本 工作过 程 ,
式 中 :s I 为总 压 缩容 积 ; 有 效体 积 弹 性模 量 ; / 卢为 A 为柱塞 杆面积 ; 为柱塞杆位移 ; 为外泄漏 系数, c
液压 缸与 负 载 的力 平衡 方程 为 Ap LL=MIP+B P+k P+F , X P X L () 3
改善 .
式 中 , 为负 载 流 量 ; q为 阀 的 流 量 增 益 系 数 ; Q K 为 阀芯 的位移 ; c 阀的流 量一 K 为 压力 系数 ; 为 负 载 p
压力 .
液 压缸流 量连 续性 方程 为
・
.
Q L=
pe
L+A XP+— L L ,
‘
() 2
Jn 08 u e2 0
液 压 伺 服 系统 中模糊 一 滑模 控 制 器 的设计 及 应 用
叶 玮 琼 , 永 权 余
(. 1广东工业大学 智能工程所 , 广东 广州 50 9 ;. 100 2 湖南 工业大学 信息工程系 , 湖南 株洲 4 20 ) 10 0
摘要 : 在对 国外 引进 的某 大型水 压试 验机控制系统改造 中, 针对 其液 压伺 服系统具 有参数变化大、 外部干扰不稳定 等特点 , 将滑模控制 与模糊控制相结合 , 设计 了基 于模糊一 滑模 控制 的伺服控 制系统 . 通过 在滑模 控制 中引入一 连 续的模糊边界层 , 有效地 消除“ 抖动” 现象 , 并在实际生产 中取得了较好效果 , 于传 统的 PD控制. 优 I
基于自适应模糊滑模变结构的采煤机自动调高控制策略

j
y
gh
j
s
t
em,t
hec
on
t
r
o
lva
r
i
ab
l
e
so
ft
heshe
a
r
e
rhe
i
tad
us
t
i
ngs
t
em we
r
ega
i
ned.Anau
t
oma
t
i
che
i
t
ys
gh
j
ys
gh
ad
us
t
i
ngcon
t
r
o
l
l
e
rt
ha
tadop
t
edt
headap
t
i
vef
uz
z
l
i
d
i
ngmodeva
i
ngandI
n
G
peBendsunde
[
15] S
imonJ W,Hoewe
rD,We
i
che
r
tD.A S
t
a
r
t
i
ng
S
imu
l
a
t
i
ono
fRa
t
che
t
i
ngandFa
t
i
i
ou
ro
f
gueBehav
t
e
r
na
lPr
e
s
su
r
e[
J].
I
模糊自适应滑模控制研究

(2)
i i
根据滑模存在条件 SS < 0 , 应有 - 1 US > ρ B , 当 S > 0时 ,
US < - ρ B , 当 S < 0时 ,
- 1
(9)
x � n =
n
∑A x
i= 1 i i
+ Bu + f .
则系统将是渐近稳定的 . 然而 ,由于 S MC 是非连续控制 , 高速切换的 控制作用将会引起系统抖振 , 这也成为阻碍其进 一步应用的主要问题 . 另一方面 ,为了保证滑模控 制系统的稳定性 ,需要预先知道系统的不确定性 上界 , 而实际应用中很难做到 , 因此往往采用较为
∑A x
i i =1
i
. (6)
(B + ΔB ) U ( t) + d ( t) . 其中 , 系统输出 y = x1 ; U 为控制输入 ; Ai , B为系 统标称参数 , 不失一般性 , 假定 B > 0; Δ表示系统 参数的不确定性 , d ( t ) 为外部干扰 . 在不引起混 淆时 , 下面将省略有关函数中的时间符号 t. 显然 式 ( 1 )可表示成
鲁东大学学报 (自然科学版 ) LudongUnive rsity Journa l(Natura l Sc ience Edition)
2007, 23 ( 4) : 306 —309
模糊自适应滑模控制研究
崔立超 1 ,刘学忠 2
( 1. 烟台职业学院软件工程学院 , 山东 烟台 264025; 2. 山东大学机械工程学院 ,济南 250061)
滑模变结构控制 ( S MC ) 是一种十分 有效的 非线性控制方法 , 它利用滑模这种特殊的控制方 式 ,使得系统状态变量沿着规定的相轨迹滑到期 望点 ,从而在滑模面上对系统摄动和外部干扰表 现出了极好的鲁棒性 , 得到了广泛的应用 . 为了讨论问题的方便 , 现将常规的滑模控制 方法简介如下 . 考虑如下的 S IS O 系统 x � = xi+1 ( t) , i = 1, 2, …, n - 1; i ( t)
自适应模糊滑模控制器设计

模糊滑模控制是将模糊控制和传统的滑模控制 相结合 , 并将两者 的优点结合起来。由于滑模控制 器是 采用语 义表达 , 系统设 计 中不 易 保 证模 糊控 制 系统 的稳定 性与鲁 棒 性 , 因此 有 学者 提 出 了模糊 滑
模 面的模糊 滑模控 制 器 , 用 李 亚普 诺 夫理 论 获 得 并 闭环 系统稳 定 性 的 证 明 J 。文 献 [ 3—4 提 出 的控 ]
根据 线性化反馈 技术 , 将滑模 控制 律设计 为 :
: g (
,
f )
() 6
寺s 1 r (+ r+ ) 2 1
+ 吉
其 中 , l t kg ( ) k 0 R= ( )一 sn s , > ,
( £ 受 —ce , ): d 定义 一个 L au o yp n v函数 :
一
假设 g( ≠0 可设计 如下线性化反馈控制律 : 。 ) ,
∑ n ( ) ( )
yx = () — —— 一
∑ (I ( ) I )
其中, ( ) 为 的隶属 函数 。 引入 向量 ( , 式变为 : )上 y X =0( X ( ) T( )
定参数摄动和外部干扰上确界不确定性问题 ,倒立摆上的运行 结果表明该方法的有效性。 关键词 :模糊 滑模 控制 ; 鲁棒 性 ; 性化 反馈 线
De i n o n a a tv u z ld n o e c n r l r sg f a d p i e f z y si i g m d o t o l e
Absr c : A w uzy si i d o tol r o ta t ne f z ldng mo e c n r l ,c mbie t u z d p i e c n r la d si ig mo e e n d wi fz y a a tv o to n ldn d h c n r l sn i e r ̄e ba k t c n lg o to ,u i g ln a d c e h oo y,i e in d frr d cn h t rng i r d t n lsi i g mo e sd sg e o e u ig c at i n ta ii a ld n d e o c nr ls se .Ba e 1 f zy r a o ig a d t e sa i t n y i fL a n vf n d n,a a ie lw f o to y tms s d Oq u z e s nn n h tbl y a a sso y pu o u c o i l d pt a o v f zy c n r l u e u z o to r ls, wh c c n t u e t u z sii g ih o si ts he f z y l n mo e o tolr a e e ie . Th c n olr t d d c nr le , r d rv d e ot l r e p o i e fe tv ou inst o lms i he ta iin lsi ig mo e c n rl u h a h e e st o r vd sef cie s l to o prb e n t r d t a ld n d o to ,s c s t e n c s i t o y
基于模糊控制和滑模控制的机电传动系统稳定性分析与优化
基于模糊控制和滑模控制的机电传动系统稳定性分析与优化机电传动系统是由电机、传动装置和负载组成的控制系统,在工业领域中广泛应用。
为了提高机电传动系统的稳定性和性能,研究人员提出了很多控制方法。
本文将基于模糊控制和滑模控制两种方法对机电传动系统进行稳定性分析与优化。
一、模糊控制方法模糊控制是一种基于经验知识的控制方法,它可以处理系统模型不准确或存在非线性问题的情况。
在机电传动系统中,模糊控制可以用于调节控制器的参数,以提高系统的稳定性和响应速度。
1. 模糊控制系统的建模首先,需要建立模糊控制系统的数学模型。
通过对机电传动系统的特性进行观测和实验,可以得到系统的输入和输出数据。
然后,利用模糊集合和模糊规则来描述系统的动态特性。
最后,建立模糊控制器,将输入与输出通过模糊化和去模糊化的过程来实现控制。
2. 模糊控制的优化策略在模糊控制中,模糊集合和模糊规则的选择对系统性能有很大影响。
可以通过试验和仿真来优化模糊集合和模糊规则的选择,以使系统的稳定性和响应速度达到最优。
3. 模糊控制在机电传动系统中的应用模糊控制已经被广泛应用于机电传动系统的速度控制、位置控制和力控制等方面。
通过模糊控制,可以更好地适应系统参数的变化和非线性问题,提高系统的控制性能。
二、滑模控制方法滑模控制是一种基于变结构控制的方法,它可以处理系统存在的不确定性和外部扰动的问题。
在机电传动系统中,滑模控制可以用于实现系统的稳定性和准确的跟踪控制。
1. 滑模控制系统的建模滑模控制的基本思想是引入一个滑模面来使系统的状态跟踪这个面。
通过选择合适的滑模面和控制律,在系统的滑动模式下实现系统的控制。
在机电传动系统中,可以将滑模控制应用于电机速度控制、负载力矩控制等方面。
2. 滑模控制的优化策略滑模控制的一个重要问题是选择合适的滑模面和控制律。
滑模面的选择要考虑系统的稳定性和响应速度,控制律的设计要考虑系统的非线性特性和外部扰动的影响。
通过试验和仿真,可以优化滑模控制策略以提高系统的控制精度和稳定性。
基于自适应模糊滑模的开关磁阻电机控制
基于自适应模糊滑模的开关磁阻电机控制标题:基于自适应模糊滑模的开关磁阻电机控制引言:开关磁阻电机是一种新型的电动机,具有结构简单、体积小、重量轻、效率高等特点,被广泛应用于各个领域。
然而,由于其转矩与角度之间的非线性关系,传统的控制方法往往无法满足精确控制的需求。
因此,本文将介绍一种基于自适应模糊滑模的控制策略,以提高开关磁阻电机的性能和控制精度。
一、开关磁阻电机控制问题的挑战开关磁阻电机的控制问题主要包括非线性、不确定性和外部干扰等方面的挑战。
首先,开关磁阻电机的转矩与角度之间存在非线性关系,使得传统的线性控制方法难以精确控制。
其次,电机的参数变化、负载扰动等不确定性因素会进一步影响控制性能。
此外,外部环境的干扰也会对电机的运行产生不利影响。
二、自适应模糊滑模控制原理为了解决开关磁阻电机控制问题,本文提出了一种基于自适应模糊滑模的控制策略。
该策略结合了自适应控制、模糊控制和滑模控制三种方法,以提高系统的性能和鲁棒性。
在自适应模糊滑模控制中,首先采用自适应控制方法对电机的参数进行估计和补偿,以抵消参数变化和负载扰动带来的影响。
然后,利用模糊控制方法建立模糊逻辑规则,根据系统的输入和输出变量进行模糊推理,以获取控制规律。
最后,引入滑模控制方法,通过设计合适的滑模面,实现对电机转矩和角度的精确控制。
三、自适应模糊滑模控制的优势相较于传统的控制方法,基于自适应模糊滑模的控制策略具有以下优势:1. 鲁棒性强:自适应控制方法能够实时估计和补偿电机参数的变化和负载扰动,提高系统的鲁棒性和适应性。
2. 控制精度高:模糊控制方法通过建立模糊逻辑规则,综合考虑多个输入变量和输出变量,实现对电机的精确控制。
3. 抗干扰能力强:滑模控制方法通过引入滑模面,抑制外部干扰对系统的影响,提高系统的抗干扰能力。
四、实验验证与结果分析为了验证基于自适应模糊滑模的控制策略的有效性,进行了一系列的实验。
实验结果表明,该控制策略能够实现对开关磁阻电机的精确控制,提高系统的性能和控制精度。
并联机器人的智能模糊滑模控制算法

g
! "
# $ $ $ $ $ $ $ $ %
其中 , ( k) e
g gg
’ ; ( k ) ; R= ! x(e k) = e ( r k) ( r k) ( r k) " ( k) e ’ ; R1= ! ( r k+1) ( r k +1) ( r k +1) " ( f k) =R1- A1R; Ae=A1; Be=- B1; 式中 : ( ( k) — 误差 。 r k) — 位置指令 ; e
- t/#
( 6)
其中 , C= [ c1 c2 1] 为常量 , 要使系统稳定需满足 :( 1) 合理选 ( 7) ( 8)
图 4 s 及 s 隶属函数 Fig.4 Membership function of s and s
时变滑模面无论初始状态在任何位置 , 一开始都需处在滑 按公式 ( 7) 、 ( 8) 的要求 , 令 ! ( t) 为 : ! ( t) ="e ; 其中 # 、 "为 常量 , 且 #>0 , # 越小 , e- t/# 的收敛速度越快 。 在滑模到达理想状态时 , 有 ( k+1) =s ( k) s 由于 s ( k+1) =Cx( ( k+1) e k+1) +! [ Beu ( k) +f ( k) ] +! ( k+1) =CAex(e k) +C
1 ( k) =-( CBe) -[ ( Ae- I) x( ( k) +! ( k+1) - ! ( k) ] ueq C e k) +Cf
( 9) ( 10)
图 5 du 隶属函数 Fig.5 Membership function of du
电气伺服系统的自适应模糊积分滑模控制

的切换 函数作 为模 糊 系统 的输 入 , 采用 积分 滑模 并
面设 计 切 换 函数 , 现 高 精 度 模 糊 滑 模 控 制 , 实 由
收稿 日期 : 0 9 0 — ; 回 日期 : 0 9 0 — 3 20—41 修 5 2 0— 62
基 金 项 目 : 国一 加 利 亚 政 府 间 国 际 合 作 项 目( 21 ) 中 保 1- 1
响 , 位置 控制 的精 度一 直是 人们 关 注 的问题 。 其 滑 模控 制器 是一 种有 效 的非 线性 鲁棒 控制 器 ,
近 年来 , 模糊 控 制器 F C在 许 多 应用 场 合 取 得
了优 于传 统控 制 的效 果 。 是 , 阶 系统 大 量对 应 但 高 的大 量模 糊规 则往 往使 分 析过 程复 杂化 。
性; 丁 表示 电磁转 矩 。 如果 电流 表 示形 式 恰 当, 电
磁 转 矩 可 简 化 为
丁 = K ( ) £ () 2
2 自适 应模 糊 积分 滑 模 控 制器 设 计
2 1 传 统 滑 模 控 制 器 .
式中: K 是转 矩 系数 ; i )则 是 控制 电流 。 而 ( 电气 伺服 系统 的框 图如 图 1所示 。
第2 2卷 第 2 期
21 0 0年 4月
电 力 系 统 及 其 自 动 化 学 报
Pr c e i g ft e C U— PS o e d n so h S E A
Vo . 2 No 2 12 .
Ap . r 20 10
电 气 伺 服 系统 的 自适 应 模 糊 积 分 滑 模 控 制
・
28 ・
电 力 系 统 及 其 自 动 化 学 报
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4-SPS(PS)并联机构模糊自适应滑模控制系统设计叶双双;黄鹏鹏;黄武良【摘要】针对并联机构传统控制方式轨迹跟踪精度误差较大的缺陷,提出了一种基于4-SPS(PS)并联机构的动力学方程和模糊自适应(Fuzzy-Adaptive SMC)滑模控制器的控制系统.首先,基于螺旋理论及反螺旋理论,设计了一种4-SPS(PS)并联机构,并采用微运动法(Micro-Motion Method)对机构的运动学方程进行了探讨.其次,基于机构的动力学方程,结合模糊自适应算法,设计了一种新型滑模控制器(SMC),模糊自适应算法的作用是实时地修正系统的不确定和非线性项参数,有效抑制了SMC系统的抖振现象.最后,建立了机构的系统仿真框图和实验平台,分别对机构进行仿真分析和实验研究.结果表明:模糊自适应滑模变结构控制器的轨迹跟踪精度高,鲁棒性强,稳态误差小,从而验证了该新型SMC控制器的有效性.【期刊名称】《机械设计与制造》【年(卷),期】2018(000)012【总页数】5页(P177-180,184)【关键词】4-SPS(PS)并联机构;微运动法;模糊自适应;滑模控制;Matlab仿真;实验分析【作者】叶双双;黄鹏鹏;黄武良【作者单位】江西理工大学机电工程学院,江西赣州 341000;江西理工大学机电工程学院,江西赣州 341000;江西理工大学机电工程学院,江西赣州 341000【正文语种】中文【中图分类】TH16;TH1121 引言少自由度(自由度小于6)的并联机构(Parallel Mechanism,PM)具有构型简单易实现、不受工作空间的限制、驱动原件少、造价低等优点,因而学者们对少自由度并联机构的研究越来越广泛[1]。
控制策略研究作为少自由度并联机构研究的重要领域,但由于并联机构的时变性、非线性和不确定性等特点,运用传统的控制方式难以达到预期的控制效果,采用智能控制策略与传统控制方式相结合的方法逐渐成为解决这类问题的有效途径[2]。
文献[3]以并联机床为研究对象,提出了一种双自适应模糊滑模控制算法,解决了系统动态性能不对称、系统精度低、稳定性差等问题。
文献[4]针对非完整移动机器人,设计了一种基于自适应模糊滑模动力学控制的混合控制算法,控制器实现了平滑的速度输出,消除了移动机器人的跟踪误差。
文献[5]针对液压驱动单元的三自由度机器人,提出了一种基于指数趋近律的SMC控制算法与模糊控制算法相结合的控制方式,仿真结果表明该模糊滑模变结构控制可以改善系统的动态品质以及提高系统的稳态精度。
文献[6]基于柔性关节机器人,设计了一种前馈补偿和模糊滑模相结合的控制器,并对其进行了实验分析,结果表明该控制器的鲁棒性较强,响应速度快。
为改善并联机构的轨迹跟踪精度性能,基于模糊自适应(Fuzzy-Adaptive)控制算法,提出了一种以4-SPS(PS)并联机构为研究对象的SMC控制设计方案,并对机构的运动特性进行了分析,建立了机构的模型和动力学方程,研究了机构在模糊自适应控制器下的轨迹跟踪曲线。
2 4-SPS(PS)并联机构模型4-SPS(PS)并联机构的一条约束支链PS固定在定平台的中心以及四条驱动支链SPS均匀地对分布在机构四周。
模型和结构简图分别,如图1、图2所示。
机构的定平台和动平台由两个正方形组构成,动平台的几何中心和中心支链的一端成垂直固定约束,中心支链的另一端与定平台的几何中心通过球副S相连接,中心支链的两端间采用移动副P相连接。
支链Ai Bi(i=1~4)的两连接端通过两个球副S 分别与定平台和动平台相连接,两个球副S的中间采用移动副P作为驱动副。
图1 并联机构模型Fig.1 Parallel Mechanism Model图2 并联机构简图Fig.2 Structure Diagram of Parallel Mechanism由螺旋理论(Screw Theory)可知,A1 B1支链的螺旋系统为:式中:矢径 r=(0,0,z);可知 A1 B1支链的反螺旋系阶数为 2,具体的形式如下:由反螺旋理论(Anti-Screw Theory)可知,4-SPS(PS)并联机构的运动特性为沿x,y,z方向的三维转动和绕z轴方向的一维平移。
2.1 微运动法建立机构的运动学方程对于多自由度的并联机构,可采用螺旋法求解其运动学方程。
但对于少自由度的并联机构,螺旋法求解具有局限性,可采用微运动法建立机构的运动学方程,且可避免螺旋法解超越方程组的难题,得到的矩阵是非奇异方阵,可以直接作为并联机构仿真系统的理论参考输入值。
微运动法的基本思想为:当机构转动的角度α,β,γ或者移动的距离dx,dy,dz较小时,下列等价形式成立:式中:δv—α,β,γ,dx,dy,dz及其高阶量。
在定平台的几何中心o建立参考坐标系,x轴方向为轴方向为,定平台平面与xy 平面重合,z轴的方向由右手螺旋法则确定。
在动平台几何中心o′建立动坐标系,w轴方向为轴方向为,动平台平面与wv平面重合,u轴的方向由右手螺旋法则确定,如图2所示。
假设动平台四个运动参数分别为α,β,γ,z,支链对称地分布在动平台和定平台之间,其中动平台和定平台之间的高度为h,各支链与定平台的夹角为φi,动平台的边长为b,定平台的边长为a。
由式1~4)可得到 A1 B1支链各支撑点变换后的坐标值。
式中:cα=cosα,sα=sinα;cβ,sβ,cγ,sγ 以此类推,下同。
变换矩阵形式为:同理,与动平台铰接点A2、A3、A4变换后的坐标为:假设驱动支链P的初始长度为li(i=1~4),各支链P的伸展量为Δli(i=1~4),则有以下关系:根据式(2)的等价表示方式,将机构的所有参数写入Matlab的m文件中,编写求解式(3)的程序。
通过Matlab计算出各杆长的变化量,以得到Δli与α,β,γ,z之间的关系,即机构的运动学方程,如式(4)所示。
2.2 建立机构的动力学方程根据拉格朗日(Lagrange)方程,采用独立坐标系法得到的4-SPS(PS)并联机构的动力学方程[7]为:式中:q、q˙—机构的广义位移和广义速度;τ—驱动力矩向量;M(q)∈R4×4—机构的惯性矩阵;Vm(q,q˙)∈R4×4—离心力矩阵;F(q˙)∈R4—摩擦矩阵;G(q)∈R4—重力矩阵;τd∈R4-干扰矩。
机构的动力学方程(式5)具有下列的基本特征:(1)矩阵 M(q)-2Vm(q,q˙)是一个斜对称矩阵。
(2)对于任意的矩阵 q 和q˙,M(q)是正定对称的,且 M(q)和 Vm(q,q˙)是一致有界的。
(3)存在一个参数向量 p,使得 M(q)、Vm(q,q˙)、F(q˙)和 G(q)满足线性关系:M(q)ω+Vm(q,q˙)ψ+F(q˙)+G(q)+τd=Φ(q,ω,ψ,q˙)Ω在编写模糊自适应SMC控制器程序的过程中,需要利用上述特性。
3 控制系统的设计3.1 控制系统框图首先,借助SolidWorks软件优异的实体建模功能,来建立4-SPS(PS)并联机构的三维模型;然后,通过SimMechanics Link插件,将建立的三维模型转换成Matlab/SimMechanics模型;最后,添加相应的检测和驱动模块,即可建立4-SPS(PS)并联机构的控制系统框图,如图3所示。
其中,Subsystem模块的主要作用是根据式(4)的运动学方程和输入的期望轨迹,来计算各杆长的变化量,为机构提供参考输入值。
Controller为系统的控制器,Subsystem3表示系统的被控对象式(5)的动力学方程;Scope1至Scope5表示示波器,分别显示动平台的位置、速度、加速度和差值变化的输出曲线,主要参考位置的输出曲线;Body Sensor是动平台的传感器。
图3 控制系统框图Fig.3 Block Diagram of Control System3.2 控制器的设计3.2.1 传统的SMC控制器滑模变结构控制从本质上看是一种特殊的非线性控制策略,其可以在系统的动态过程中,不断地调整系统的运动状态,迫使系统按照预定滑模状态轨迹运动。
设计SMC控制器主要是设计切换函数s(x)和滑模控制律u(x)两大任务。
传统切换函数的表达式为式中:e—系统误差,C=diag(C1,…,Cn),Ci>0。
幂次趋近律是一种常用的趋近律,其表达式如下:式中:k>0,0<α<1。
当系统的运动状态远离滑模面时,趋近速度较小,可通过增大α值来提高趋近速度,缩短趋近时间;当系统的运动状态靠近滑模面时,趋近速度较大,可通过减小α值来降低趋近速度,有利于削弱抖振。
3.2.2 模糊自适应(Fuzzy-Adaptive SMC)控制器对于传统的SMC控制器,幂次趋近律中的参数α和切换函数中的参数C常常设定为特定的常值矩阵或者常数。
因此,对于柔性串联机械臂这种复杂的非线性系统,往往不能达到预期理想的控制效果。
模糊自适应滑模变结构控制器通过模糊自适应算法,对SMC控制器的参数C和参数α进行在线实时修正,以提高系统的轨迹跟踪精度。
模糊自适应滑模变结构控制器的示意图,如图4所示。
图4 模糊自适应SMC控制器示意图Fig.4 Schematic Diagram of Fuzzy-Adaptive SMC模糊自适应控制器输入的变量为C和α,输出的变量为和。
假设输入和输出变量的模糊子集定义为{NB,NM,NS,ZO,PS,PM,PB},选择三角形隶属函数,如图6所示。
清晰化方法采用Mamdani推理法,根据模糊控制经验,得到的控制规律表,如表1、表2所示。
表1 的控制规律表Tab.1 Control Regularity Table of?表2 的控制规律表Tab.2 Control Regularity Table of?4 仿真分析和实验研究假设机构理想输入信号的表达式分别为:α=β=0.3sin(6πt),γ=-0.3sin(6πt),z=3+0.3sin(6πt)。
将理想输入信号和机构的运动学方程式(4)输入至图3的Subsystem模块中。
设定机构的初始参数:动平台的质量为1kg,转动惯量Ixx=11.7kg·m2,Ivv=11.8kg·m2,Izz=20.1kg·m2,φ1=φ2=φ3=60°,m=50mm,n=100mm,l=120mm。
不断调整控制器的参数,调整至输出曲线运动平稳且无明显抖动时,在Matlab的命令窗口中输入Plot命令,绘制出Scope中的图形,并与期望曲线进行对比,得到机构各方向的理论输入曲线和实际输出曲线的对比结果,如图5~图7所示。
图5 α、β方向理想输入与实际输出仿真对比图Fig.5 Ideal Input and Actual Output Simulation Comparison Diagram of Direction α、β图6 γ方向理想输入与实际输出仿真对比图Fig.6 Ideal Input and Actual Output Simulation Comparison Diagram of Directionγ图7 z方向理想输入与实际输出仿真对比图Fig.7 Ideal Input and Actual Output Simulation Comparison Diagram of Direction z为了更好的验证模糊滑模控制算法的有效性,搭建了4-SPS(PS)的实验平台,如图8所示。