三相电压型PWM整流器PI调节器参数整定的原理和方法
三相电压型PWM整流器PI调节器参数整定的原理和方法

三相电压源型PWM整流器PI调节器参数整定的原理和方法1引言1.1 PID调节器简介在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。
PID控制器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。
目前,在工业过程控制中,95%以上的控制回路具有PID结构。
当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型,控制理论的其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。
PID控制,实际中也有PI和PD控制。
PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的,其原理图如图1-1所示。
图1-1 PID控制系统原理图PID控制器传递函数常见的表达式有以下两种:(1)()ip dKG s K K ss=++,Kp代表比例增益,Ki代表积分增益,Kd代表微分增益;(2)1()p diG s K T sT s=++(也有表示成1()(1)p diG s K T sT s=++),Kp代表比例增益,Ti代表积分时间常数,Td代表微分时间常数。
这两种表达式并无本质区别,在不同的仿真软件和硬件电路中也都被广泛采用。
⏹比例(P,Proportion)控制比例控制是一种最简单的控制方式,其控制器的输出与输入误差信号成比例关系,能及时成比例地反映控制系统的偏差信号,偏差一旦产生,调节器立即产生控制作用,以减少偏差。
当仅有比例控制时系统输出存在稳态误差(Steady-state error)。
⏹积分(I,Integral)控制在积分控制中,控制器的输出与输入误差信号的积分成正比关系。
对一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的或简称有差系统(System with Steady-state Error)。
为了消除稳态误差,在控制中必须引入“积分项”。
关于模糊PI控制的三相高功率因数整流器的探讨

关于模糊PI控制的三相高功率因数整流器的探讨1.概述近年来,随着IGBT器件的愈发成熟,采用PWM技术的高功率因数整流的研究和应用得到越来越多的重视。
传统的PI控制方便简单精确,但需首先获得系统的精确数学模型。
对于非线性、多耦合,时变的复杂系统,往往很难建立精确的数学模型,使控制难以达到预期效果。
采用模糊控制方法不需要建立精确的数学模型,且有快速性、鲁棒性强的控制性能。
结合模糊控制和PI调节,在线实时整定PI参数,可以避免系统出现较大超调和不稳定,获得优越的动静态性能和抗干扰能力。
2.三相PWM整流电路工作原理虽然PWM分类方法众多,但最基本的分类方法是将其分为电压型PWM 整流器(V oltage Source Rectifier,VSR)和电流型PWM整流器(Current Source Rectifier CSR)两大类。
电流型PWM整流器需较大的直流储能电感,以及交流侧滤波环节所导致的电流畸变、振荡等问题的存在导致应用上不如电压型PWM整流器广泛。
本文主要讨论电压型PWM及其控制方式。
图1为三相半桥VSR电路拓扑图,其中交流侧电感L和直流侧电容C为电路中不可或缺的部分。
VSR交流侧电感的取值不仅影响到电流环的动、静态响应,而且还制约着VSR输出功率、功率因数以及直流电压。
直流侧电容C起到了稳定直流电压和滤除由器件高频开关动作造成的直流电压纹波的作用。
图1 三相半桥VSR电路拓扑图PWM整流器己不是一般传统意义上的AC/DC变换器,由于能量的双向传输,当PWM整流器从电网吸取能量时,则运行于整流工作状态;而当PWM整流器向电网传输电能时,则运行于有源逆变工作状态。
单位功率因数指的是:当PWM整流器运行于整流状态时,网侧电压、电流同相位(正阻特性);当PWM 整流器运行于有源逆变状态时,其网侧电压、电流反相(负阻特性)。
为了使PWM整流电路工作时功率因数近似为1,同时直流侧电压能够稳定,设计合适的控制算法是其中的关键。
三相PWM整流器PI调节器设计分析

0 引 言
式 中 , 占空 比 。 为 根据 功率 平 衡原 理 , 直流 电压 动态 方 程表 达 为 :
随着 电力 电子 设备 的大 范 围应 用 , 电网谐 波污 染 已成为 人们 越来 越 关注 的课 题 。传 统 二极 管和 晶 闸管 整流 装 置 网侧 电流 谐波 含量 大 、 率 因数低 , 功 不能 满 足相 关 的标 准 要求 。三 相 P WM 整 流
确性 。
上 式忽 略 3-相 输 入 电感和 功 率转 换 过程 中的 能量 损耗 。现 "
击e 一 吉 一
(-) 的方程 , 有 : dq 中 则
dd i
i
—
( 5 )
() 6 () 7
将 三 相 静 止 坐 标 下 的状 态 方 程 转 换 为 两 相 同步 旋 转 坐 标 系
跟踪指令 电流 , 出稳定直流 电压 , 出了电流 内环和 电压外 环的 P 调节器 的设计 。最后在 MA L B SMULNK中进行 了三 相 P 输 给 I T A /I I WM 整流 器 系统 的仿 真实验, 结果验证了 P 调节器设计 的正确性 。ቤተ መጻሕፍቲ ባይዱI 关键词 :WM 整流器 ;I P P 调节器 ; 前馈解耦 ; 指令电流
][ 警 妇 C
将 式 () 行整 理 可 以得到 : 4进
( 4 )
技术 具 有功 率 因数高 、 网侧 电流谐 波含 量 小、 流 稳定 可 调和 能 量 直 可双 向流 动等 优 点 , 现 了 电能 的绿 色 变 换 , 有源 滤 波 、 实 在 四象 限 变 频器 、 阳能 发 电等领 域 , 太 有着 越来 越广 阔 的应 用前 景 [ 。 1 三相 P WM 整 流器 在 控制 方 法上 可 以分 为 直接 电流 控制 和 间 接 电流 控制 2种 。直 接 电流控 制 是将 整流 器输 入 电流 作 为 反馈 量 和 控制 量 , 系统 响应 速度 快 、 电流 控制 精度 高 。间接 电流 控 制 是通 过 控制 整流 器输 入 电压 , 间接 完 成对 输入 电流 的控制 。 这种 方 法动 态 响应 速度 较慢 , 结构 简单 、 制简 单 、 但 控 性价 比较高 。 直接 控 制 的 三相 P WM 整流 器采 用 前馈 解 耦控 制 双 闭环 控制 策 略 ,电 压 外环 的输 出量作 为指 令 电流 , 电流 内环用 于控 制输 入 电流 , 实现 输 入 电 流 实 时跟踪 指 令 电流 ,这种 控制 方式 动 态 响应速 度 快 、控 制精 度 高 , 实 际工程 中应 用较 为广 泛 [ 。 在 “] 本 文 主 要 介 绍了 采用 前馈 解 耦 控 制 双 闭环 控 制 策 略 的三 相 P V整 流器 的模 型 ,重 点研 究 了 电流 内环 和 电压 外环 的 P 控制 WI l I 器 的设 计 , 出 了设 计 原理 , 过 仿 真验 证 了 P 控 制 器 设 计 的正 给 通 I
【全面版】三相电压型 PWM 整流器原理及控制方法PPT文档

三相电压型 PWM 整流器系统结构图 复位电路采用按键手动复位。
两相电流 传感器
电源 模块
开关器件驱动
直流电压,电流
空基 圆间本,矢 原从量理 而P就 形W是 成M把S(VS三PV相WPWMPWM波)M。控整制流策器略输是入根端据电整压流在器复空平间面电上压转矢换量为切空换间来电控压制矢整与量流保,器护通电的S过V路一P不种W同新M的波的开形控关制状策态略组传。合感构器成8个空间矢量去逼近电压
三相电压型PWM整流
器的拓扑结构如右图所示,
其中在所示的电路中三相电
感L起滤波作用,因此交流 ua ia R
侧电流可近似认为是三相正 弦电流,C为直流侧电容,
ub ib N uc ic
R R
起稳压滤波的作用,当系统
稳定时,可保持直流母线电
压基本不变,故可看作是直
流电压源。R为线路与开关
管的等效电阻,RL为负载。
pW,pV,pU V51+ 的 MPI 接 F F u u 0 0 71C 1 1 0 C1 K 0 01R2 3 C Fu1.0 5 CFu1.0 2 T U O V 5 D 1 N 8 7G 3 N I V F 2 u C 1 1 V51+ F 76 85 u 0 1 3 C3 955PLT 43 21 CCV EGDIRB 0 4 7 R2 7 0 4 7A9U 21 1 J 2NOC MWP
- 直流侧电压
开关管交
流入侧电的压输由此可以看出, PWM整流器的交流回 路的组成有电网电源, 开关管交流侧输入电 压,交流侧电感。
空间矢量PWM(SVPWM)控制策略是根 据整流器空间电压矢量切换来控制整流器的 一种新的控制策略。基本原理就是把三相 PWM整流器输入端电压在复平面上转换为空 间电压矢量,通过不同的开关状态组合构成8 个空间矢量去逼近电压圆,从而形成 SVPWM波。
学士论文_三相电压型 PWM 整流器原理及控制方法
学士论文_三相电压型PWM 整流器原理及控制方法摘要随着电网谐波污染问题日益严重和人们对高性能电力传动技术的需要以及绿色能源的发展,PWM整流器技术已成为电力电子技术研究的热点和亮点。
三相电压型PWM 整流器可以做到高功率因数,直流电压输出稳定,具有良好的动态性能,还可实现能量的双向流动。
因此,成为当前电力电子领域研究的热点课题之一。
论文首先以三相电压型PWM整流器的主电路拓扑结构,阐述三相电压型PWM整流器的基本工作原理并建立了三相电压型PWM整流器的数学模型;其次,介绍三相电压型PWM整流器的控制方法,深入研究三相电压型PWM整流器的空间电压矢量脉宽调制控制方法, 以TI公司的TMS320LF2407A芯片作为控制器,选用三菱公司的IPM模块进行三相电压型PWM整流器系统的硬件设计,包括主电路、检测控制电路,保护电路等;结合硬件设计的基础之上,完成相应的软件设计。
关键词PWM整流器电压空间矢量PWM(SVPWM)控制DSP Title Design of three-phase PWM Rectifier powerAbstractWith the serious problem of harmonics pollution to the power system and the need of high performance of AC drive application and the development of the green power technology,PWM rectifier has become a highlight in the field of power electronics. Three-phase PWM rectifiers have recently been an active research topic in power electronics due to more virtues, such as sinusoidal input currents, unity power factor , steady output voltage, good dynamics and bin-directional energy flow.Firstly, the thesis elaborated the basic principle of work for the PWM rectifier according to main circuit topology of three-phase voltage-type PWM rectifier, and the establishment of a three-phase voltage-type PWM rectifier model; Secondly, the thesis proposed the three-phase voltage-type PW M rectifier’s control strategy. Based on the control strategy it has studied the space voltage vector pulse width modulation control method. With TI company's TMS320LF2407A chip as controllers, choose Mitsubishi company IPM module for three-phase voltage source PWM rectifier system hardware design, including the main circuit, detection control circuit, protect circuit, etc.; Combined with the basis of hardware design, software design of complete corresponding.Keywords PWM rectifier Voltage space vector PWM (SVPWM) control DSP目录第一章绪论 (1)1.1 课题研究背景及意义 (1)1.2 国内外PWM 整流器研究发展现状 (2)1.3 本课题研究的内容 (6)1.4 本章小结 (6)第二章三相电压型PWM 整流器原理及控制方法 (7)2.1 方案论证 (7)2.1.1 微处理器的选择 (7)2.1.2 功率器件的选用 (8)2.2 三相电压型PWM整流器主电路拓扑结构 (9)2.3 PWM整流器运行的基本原理 (10)2.4 三相电压型PWM整流器的数学模型 (13)2.4.1 三相VSR一般数学模型 (13)2.4.2 dq坐标系下三相VSR数学模型 (15)2.5 三相电压型PWM整流器控制方法 (15)2.6 电压空间矢量PWM(SVPWM)控制 (17)2.6.1 SVPWM基本原理 (18)2.6.2 SVPWM的合成 (19)2.6.3 SVPWM与SPWM控制的比较 (21)2.7 本章小结 (22)第三章三相电压型PWM整流器系统硬件设计 (22)3.1 硬件系统设计 (22)3.2 主电路设计 (23)3.2.1 进线熔断器 (23)3.2.2 功率器件选型 (24)3.2.3 交流侧电感设计 (24)3.2.4 直流侧电容选取 (28)3.2.5 IPM保护及其接口电路 (29)3.3 检测控制电路设计 (31)3.3.1 过零检测电路设计 (31)3.3.2 采样调理电路设计 (32)3.3.3 温度检测电路设计 (33)3.3.4 DSP控制电路设计 (34)3.4 本章小结 (36)第四章三相电压型PWM整流器软件设计 (36)4.1 系统资源分配 (37)4.2 控制软件的构成 (38)4.2.1 主程序设计 (38)4.2.2 中断服务程序设计 (39)4.2.3 子程序设计 (41)4.3 本章小结 (43)结论 (43)致谢 (44)参考文献 (45)附录电气原理图............................................................................ 错误!未定义书签。
三相电压型PWM整流器的PI参数设计
三相电压型PWM整流器的PI参数设计
三相电压型PWM整流器的PI参数设计包括以下步骤:
1. 确定控制目标和性能要求:首先需要明确所设计的PI控制器的控制目标和性能要求,比如输出电压稳定性、响应速度、静态误差等。
2. 获取系统模型:需要获取三相电压型PWM整流器的数学模型,包括其传递函数或状态空间模型。
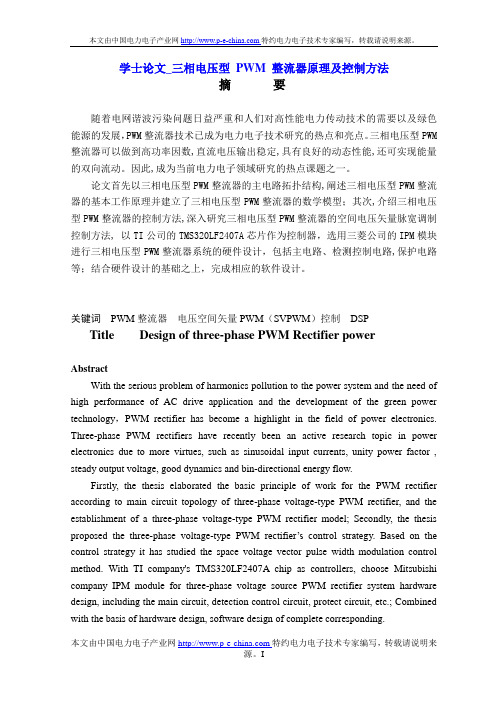
3. 设计比例增益系数Kp:比例系数Kp的作用是根据当前误差信号来产生一个控制信号,控制输出信号的波形。
Kp的大小决定了控制响应的快慢和稳定性,通过试探法或者模拟仿真方法进行选取。
4. 设计积分时间常数Ti:积分时间常数Ti的作用是对误差信号进行积分,以产生一个稳态控制信号。
它的大小决定了控制系统的稳态精度和抗干扰能力,通过试探法或者模拟仿真方法进行选取。
5. 设计PI控制器:将比例增益系数Kp和积分时间常数Ti组合成一个PI控制器的传递函数或状态空间方程,进行数学建模。
6. 对PI控制器进行仿真和调试:将设计好的PI控制器模型进行仿真和调试,检查其性能指标是否满足要求。
如果不满足,则需要重新调整参数。
7. 在实际电路中应用:将设计好的PI控制器应用到实际的三相电压型PWM整流器中,进行验证和调试,保证其稳定性和可靠性。
PWM整流器PI参数设计

PWM整流器PI参数设计一、本文概述随着电力电子技术的快速发展,脉冲宽度调制(PWM)整流器在电力系统中得到了广泛应用。
PWM整流器以其高效、稳定和可控的特点,成为现代电能质量管理和电机驱动领域的重要组成部分。
PI参数设计作为PWM整流器控制策略中的关键环节,对整流器的性能和稳定性起着至关重要的作用。
本文旨在探讨PWM整流器PI参数设计的基本原理、方法及其在实际应用中的优化策略。
本文将简要介绍PWM整流器的基本原理及其在现代电力系统中的应用背景。
接着,重点分析PI参数设计在PWM整流器控制中的重要性,并详细阐述PI参数设计的基本原理和方法,包括比例系数和积分系数的选取原则、参数调整策略等。
还将探讨PI参数设计过程中需要考虑的关键因素,如系统稳定性、动态响应速度以及抗干扰能力等。
本文将结合实际应用案例,分析PI参数设计在实际应用中的优化策略,为PWM整流器的设计与应用提供有益的参考。
通过本文的研究,旨在为相关领域的研究人员和工程师提供PWM整流器PI参数设计的理论支持和实践指导,推动PWM整流器技术的进一步发展。
二、PWM整流器的基本原理PWM整流器,即脉冲宽度调制整流器,是一种先进的电力电子装置,其基本原理是通过对输入电流的脉冲宽度进行调制,实现输入电流波形与电网电压波形的同步,并使其接近正弦波,从而实现高功率因数整流。
PWM整流器通常采用三相桥式电路结构,包括六个开关管,每个开关管由一个绝缘栅双极晶体管(IGBT)或其他类型的全控型器件组成。
通过对这些开关管进行适当的控制,可以实现对输入电流的精确控制。
PWM整流器的工作原理可以分为两个阶段:整流阶段和逆变阶段。
在整流阶段,PWM整流器将输入的交流电转换为直流电,同时实现对输入电流的精确控制。
在逆变阶段,PWM整流器将直流电逆变为交流电,以供给负载使用。
为了实现输入电流的高功率因数,PWM整流器需要采用适当的控制策略。
其中,PI控制是一种常见的控制策略,它通过对输入电流的误差进行积分和比例运算,生成控制信号,从而实现对输入电流的精确控制。
三相pwm整流器工作原理

三相pwm整流器工作原理三相PWM整流器工作原理。
三相PWM整流器是一种常见的电力电子器件,它的工作原理主要涉及到PWM调制和整流两个方面。
在电力系统中,三相PWM整流器通常被用于控制交流电到直流电的转换,它具有高效、可控性强等优点。
下面我们将详细介绍三相PWM整流器的工作原理。
首先,我们来看PWM调制的原理。
PWM(Pulse Width Modulation)即脉宽调制技术,它通过改变脉冲信号的宽度来实现对电压的调节。
在三相PWM整流器中,PWM调制主要用于控制开关管的导通和截止,从而实现对交流电的整流。
当输入的交流电信号经过PWM调制后,输出的脉冲信号就可以控制开关管的导通时间,从而实现对输出电压的调节。
这种调制方式可以保证输出电压的稳定性和可控性,是三相PWM整流器的关键工作原理之一。
其次,我们来讨论整流的原理。
在三相PWM整流器中,整流是指将输入的交流电转换为直流电的过程。
通过PWM调制,开关管可以控制交流电的导通和截止,从而在输出端得到一个近似直流的电压信号。
整流过程中,需要注意输出电压的稳定性和纹波的控制,这需要通过合理的PWM调制和滤波电路来实现。
整流过程的稳定性和效率直接影响着整个系统的性能和可靠性,因此整流是三相PWM整流器工作原理中非常重要的一环。
综上所述,三相PWM整流器的工作原理主要涉及到PWM调制和整流两个方面。
通过PWM调制,可以实现对交流电的控制和调节;而整流过程则是将交流电转换为直流电的关键步骤。
三相PWM整流器以其高效、可控性强等优点在电力系统中得到了广泛应用,它的工作原理对于理解和设计电力电子系统具有重要意义。
希望本文能够对读者加深对三相PWM整流器工作原理的理解有所帮助。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三相电压源型PWM整流器PI调节器参数整定的原理和方法1引言1.1 PID调节器简介在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。
PID控制器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。
目前,在工业过程控制中,95%以上的控制回路具有PID结构。
当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型,控制理论的其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。
PID控制,实际中也有PI和PD控制。
PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的,其原理图如图1-1所示。
图1-1 PID控制系统原理图PID控制器传递函数常见的表达式有以下两种:(1)()ip dKG s K K ss=++,Kp代表比例增益,Ki代表积分增益,Kd代表微分增益;(2)1()p diG s K T sT s=++(也有表示成1()(1)p diG s K T sT s=++),Kp代表比例增益,Ti代表积分时间常数,Td代表微分时间常数。
这两种表达式并无本质区别,在不同的仿真软件和硬件电路中也都被广泛采用。
⏹比例(P,Proportion)控制比例控制是一种最简单的控制方式,其控制器的输出与输入误差信号成比例关系,能及时成比例地反映控制系统的偏差信号,偏差一旦产生,调节器立即产生控制作用,以减少偏差。
当仅有比例控制时系统输出存在稳态误差(Steady-state error)。
⏹积分(I,Integral)控制在积分控制中,控制器的输出与输入误差信号的积分成正比关系。
对一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的或简称有差系统(System with Steady-state Error)。
为了消除稳态误差,在控制中必须引入“积分项”。
积分项对误差取决于时间的积分,随着时间的增加,积分项会增大。
这样,即便误差很小,积分项也会随着时间的增加而加大,它推动控制器的输出增大使稳态误差进一步减小,直到等于零。
因此,比例+积分(PI)控制器,可以使系统在进入稳态后无稳态误差。
积分作用的强弱取决于积分时间常数Ti,Ti越大,积分作用越弱,反之则越强。
⏹微分(D,Differential)控制在微分控制中,控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系。
自动控制系统在克服误差的调节过程中可能会出现振荡或者失稳。
其原因是在于由于存在有较大惯性组件(环节)或有滞后(delay)组件,具有抑制误差的作用,其变化总是落后于误差的变化。
解决的办法是使抑制误差的作用“超前”,即在误差接近零时,抑制误差的作用就应该是零。
这就是说,在控制器中仅引入“比例”项往往是不够的,比例项的作用仅是放大误差的幅值,而目前需要增加的是“微分项”,它能预测误差变化的趋势,这样,具有比例+微分的控制器,就能够提前使抑制误差的控制作用等于零,甚至为负值,从而避免了被控量的严重超调。
所以对有较大惯性或滞后的被控对象,比例+微分(PD)控制器能改善系统在调节过程中的动态特性。
P环节作为PID调节的灵魂,是必不可少的,I和D不可能单独存在而起到调节作用。
常见的调节器有P调节、PI调节、PD调节、PID调节,在实际应用中,PI调节相对于PD、PID调节用的更多。
PID调节器的参数整定是控制系统设计的核心内容。
它是根据被控过程的特性确定PID调节器的比例增益、积分时间和微分时间的大小。
PID调节器参数整定的方法很多,概括起来有两大类:一是理论计算整定法。
它主要是依据系统的数学模型,经过理论计算确定调节器参数。
这种方法所得到的计算结果未必可以直接用,还必须通过工程实际进行调整和修改。
二是工程整定方法,它主要依赖工程经验,直接在控制系统的试验中进行,方法简单,易于掌握,在实际工程中被广泛采用。
1.2 柔性直流控制系统中包含的PI环节电压源换流器的控制方式主要可以分为间接电流控制和直接电流控制两大类。
间接电流控制,实际上就是所谓的“电压幅值相位控制”,即通过控制换流器交流侧输出电压基波的幅值和相位来达到控制目标。
此控制方式的特点是结构简单,但存在着交流侧电流动态响应慢、难以实现过电流控制等缺陷。
目前,占主导地位的是直接电流控制,也称为“矢量控制”,通常由外环电压控制和内环电流控制两个环构成,具有快速的电流响应特性和很好的内在限流能力,因此很适合应用于高压大功率场合的柔性直流系统。
在直接电流控制策略中,电压外环跟踪系统级控制器给定的参考信号,采用实际值与参考值相比较经PI调节器输出电流指令,可以实现定直流电压、定有功功率、定频率、定无功功率、定交流电压等控制目标。
电流内环主要是按电压外环输出的电流指令进行电流控制,电压环输出的电流指令与实际电流相比较经PI调节,最终得到调制电压,再与三角波比较产生触发脉冲信号。
图1-2是一端换流站直接电流控制基本原理示意图。
其中A参考为有功功率类控制量,B参考为无功功率类控制量。
图1-2 一端换流站直接电流控制原理示意图从上图可以看出,在柔性直流控制系统中,整流侧和逆变侧分别包含4个PI环节,控制对应的有功、无功分量。
因此,PI参数的整定在柔性直流控制系统设计中占有重要地位。
1.3 本文研究内容本文从理论计算和工程经验两个角度,探讨了柔性直流控制回路中PI调节器的参数整定原理和方法。
包含以下内容:(1)根据电压源换流器VSC的电路结构及其在dq坐标系下的数学模型,推导出电流环、电压环的传递函数。
按照典型I型、典型II型、二阶系统三种方案设计电流内环,分析并比较了三种方案下的阶跃响应和动态性能。
基于VSC一般低频模型设计电压外环,并分析了电压外环的阶跃响应和动态性能。
(2)梳理了几种工程中实用的PI参数整定方法,这些方法较之理论计算,更为简单实用。
(3)通过系统仿真,对通过理论计算和工程经验整定出的PI参数合理性进行验证。
2 理论计算整定法2.1 电流内环控制系统设计图2-1 电压源换流器电路结构电压源换流器电路结构如图2-1所示。
在(,)d q 坐标系下,三相VSC 模型可以表示为:d d d q q qe i v Lp R L e i v L Lp R ωω⎡⎤⎡⎤⎡⎤+-⎡⎤=+⎢⎥⎢⎥⎢⎥⎢⎥+⎣⎦⎣⎦⎣⎦⎣⎦ (2-1)式中,d e 、q e ——电网电动势矢量dqE 的d 、q 轴分量;d v 、qv ——三相VSC 交流侧电压矢量dqV 的d 、q 轴分量;di 、q i ——三相VSC 交流侧电压矢量dq I的d 、q 轴分量;p ——微分算子。
从(2-1)式可以看出,由于换流器d 、q 轴变量相互耦合,给控制器设计造成一定困难。
为此,可采用前馈解耦控制策略,当电流环采用PI 调节器时,根据方程(2-1)可以将dv 、qv 的控制方程改写为:**()()()()iI d iP d d q d iI q iP q q d q K v K i i Li e s K v K i i Li e s ωω⎧=-+-++⎪⎪⎨⎪=-+--+⎪⎩ (2-2)式中,iPK 、iIK ——PI 调节器的比例增益和积分增益;*di 、*qi ——d i、q i 的参考值。
将式(2-2)带入式(2-1),并化简可得**/ 010 /iI iP d d d iI iPq q q iI iP K R K L i i i s K p K i i L s i K R K L s ⎡⎤⎡⎤⎛⎫--+⎢⎥ ⎪⎢⎥⎡⎤⎡⎤⎡⎤⎝⎭⎣⎦⎛⎫⎢⎥=-+⎢⎥⎢⎥⎢⎥ ⎪⎢⎥⎝⎭⎡⎤⎛⎫⎢⎥⎣⎦⎣⎦⎣⎦⎢⎥--+ ⎪⎢⎥⎢⎥⎝⎭⎣⎦⎣⎦(2-3)式(2-3)表明:基于前馈的控制算式(2-2)使VSC 电流内环(d i,q i )实现了解耦控制。
图2-2给出了解耦后的电流内环控制结构图。
图2-2 三相VSC 电流内环解耦控制结构由于两电流内环的对称性,因而下面以q i控制为例讨论电流调节器的设计。
考虑电流内环信号采样的延迟和PWM 的小惯性特性,取sT 为电流内环电流采样周期(即为PWM 开关周期),PWMK 为桥路PWM 等效增益,0.5sT 模拟PWM 的小惯性特性。
已解耦的q i电流内环结构如图2-3所示。
i 图2-3 电流内环结构将PI 调节器传递函数改写成零极点形式,即1iI i iP iP i iPiI iK s K K s s K K τττ+⎧+=⎪⎪⎨⎪=⎪⎩(2-4)并将小时间常数0.5sT 、sT 合并,得到简化后电流环结构如图2-4所示。
i图2-4 电流内环简化结构2.1.1 典型I 型系统设计电流内环从图2-4可以看出,该系统本身即为典型I 型系统1,从提高系统稳定性角度考虑,可以将PI 调节器零点抵消电流控制对象传递函数的极点2,即11(/)i s L R s τ+=+,此时/i L R τ=。
PI 调节器采取零点抵消极点后,若不考虑qe 扰动,电流环的开环传递函数为:()(1.51)iP PWMoi i s K K W s R s T s τ=+ (2-5)由典型I 型系统参数整定关系[见附录6.2],当阻尼比取0.707ξ=时,可得:1对于有限阶(不含延迟因子)的线性定常系统,开环传递函数0()G s 可以表示为:012(1)(1) (1)(),(1)(1) (1)a b m N N N n K T s T s T s G s n ms T s T s T s +++++=>+++1N s ——N 重积分因子(N 是包括零在内的正整数)aT ,bT ,…,mT ,1N T +,2N T +,…,nT ——时间常数(可以为复常数)开环传递函数中所包含的积分因子的重数N ,是对系统的稳态误差起决定性作用的因素之一。
因此数N 称为系统按稳态误差划分的型。
当N=0,1,2,…时,所属系统分别称为0,1,2…型系统。
2 仅是从提高系统稳定性角度出发的一种选择,不是唯一选择。
1.512s iP PWM i T K K R τ=(2-6)求解得:33i iP s PWMiI s PWM R K T K R K T K τ⎧=⎪⎪⎨⎪=⎪⎩(2-7) 式(2-7)即为按照典型I 型系统设计时,电流内环PI 调节器的理论推导值。
另外,此时电流内环闭环传递函数为:21() 1.51ci i s i ip PWM ip PWMW s R T R s s K K K K ττ=++ (2-8)当开关频率足够高,即sT 足够小时,忽略二次项2s ,并将式(2-7)带入式(2-8),可以得到电流内环简化等效传递函数为:1()13ci s W s T s =+ (2-9)式(2-9)表明,当电流内环按典型I 型系统设计时,电流内环可近似等效成一个惯性环节,其惯性时间常数为3sT 。