“牛牛”机器人足球仿真大赛培训之规则介绍 邵振洲共33页
(仿真)比赛规则
FIRA SimuroSot 5vs5 (仿真)比赛规则1.介绍以下规则用于FIRA 中型组仿真比赛2. 仿真平台1. 计算机配置2. 场地尺寸赛场为黑色(不反光的)木质长方形场地,其尺寸是220cm×180cm ,带有5cm 高,2.5cm 厚的围墙。
围墙的侧面为白色,围墙顶部为黑色。
在场地的四角固定四个7cm×7cm 的等腰三角形以避免球进入角落。
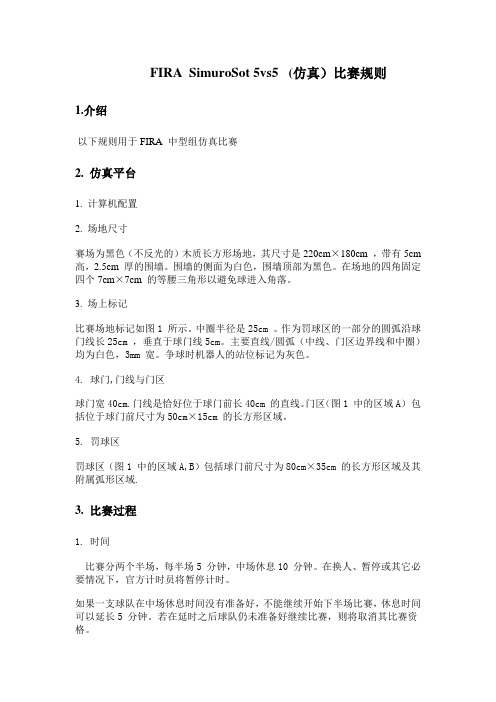
3. 场上标记比赛场地标记如图1 所示。
中圈半径是25cm 。
作为罚球区的一部分的圆弧沿球门线长25cm ,垂直于球门线5cm。
主要直线/圆弧(中线、门区边界线和中圈)均为白色,3mm 宽。
争球时机器人的站位标记为灰色。
4. 球门,门线与门区球门宽40cm.门线是恰好位于球门前长40cm 的直线。
门区(图1 中的区域A)包括位于球门前尺寸为50cm×15cm 的长方形区域。
5. 罚球区罚球区(图1 中的区域A,B)包括球门前尺寸为80cm×35cm 的长方形区域及其附属弧形区域.3. 比赛过程1. 时间比赛分两个半场,每半场5 分钟,中场休息10 分钟。
在换人、暂停或其它必要情况下,官方计时员将暂停计时。
如果一支球队在中场休息时间没有准备好,不能继续开始下半场比赛,休息时间可以延长5 分钟。
若在延时之后球队仍未准备好继续比赛,则将取消其比赛资格。
2. 暂停操作者可向裁判要求暂停。
在一场比赛中每队有权暂停2 次,每次将持续2 分钟。
3. 记时仿真平台上的记时器不能代替官方记时器,比赛中应当使用专门的记时器. 4. 比赛中断只有在下列情况下比赛中断并由一个操作者重新布置机器人:1.破门得分或出现犯规2.裁判员判点球,争球,球门球,任意球3.仿真平台出现问题4.有不可预知的情况发生,如计算机自动重启,突然停电5.运动员如果一个机器人位于己方的球门区内,应当被视为守门员。
(一个机器人有多于50%在门区内就认为该机器人在门区内,这一点由裁判员来判断。
2016 RoboCup仿真组比赛规则
2016RoboCup机器人世界杯中国赛足球仿真组(3D)比赛规则这篇文档介绍2016RoboCup机器人世界杯中国赛(China Open)足球仿真3D组的比赛规则。
比赛规则制定的宗旨是保证比赛的公平性和流畅性,技术委员会有权在任意时刻合理的修改比赛规则,并会及时通知各参赛队伍。
各参赛队伍如果对比赛规则有意见或着建议可以向技术委员会反馈,技术委员会保留最终决定权。
本规则根据2015中国机器人大赛暨RoboCup公开赛3D仿真组比赛规则修订。
1. 比赛赛程安排1.1 注册阶段所有参赛球队都需要在赛前进行注册,请将以下信息发送至技术委员会邮箱baofufang@和huangyue_estu@●球队名称;●学校名称;●队伍成员(请注明指导老师和领队);●联系邮箱;●球队描述文档;●球队可执行码;请确保球队可执行码可以在比赛规则要求的环境中正常运行(详见比赛规则机器配置与软件环境)。
如果注册通过,技术委员会会尽快回复一封确认邮件。
1.2 比赛阶段在现场比赛阶段所有参赛队伍将被分为A、B两组,在组内进行循环赛后根据积分进行排名。
每组内排名在前四名的队伍进入八强,其余队伍将进行排位赛,排位赛的赛制同循环赛。
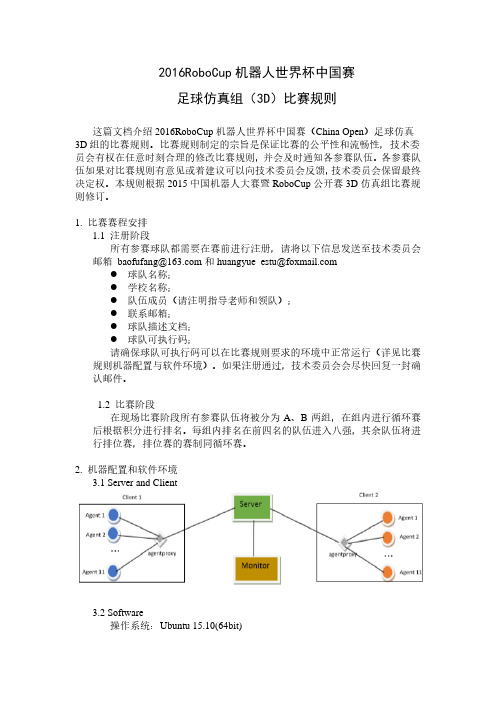
2. 机器配置和软件环境3.1 Server and Client3.2 Software操作系统:Ubuntu 15.10(64bit)仿真环境:Simspark 0.2.4, Rcssserver3D 0.6.103. 最新修订规则根据2016 RoboCup世界杯3D仿真组组织委员会对于规则的修改,特增订如下规则:1.在球门发球时,若发球方出现乌龙球,对手方将获得一次角球机会而不是直接得分。
2.同往年规则一样,开球直接进球不得分,对手方将获得一次球门发球的机会,而不是以往的开球机会。
特别的,为了促进RoboCup3D仿真项目在中国的发展,我们决定参照RoboCup世界杯的Free/Scientific Challenge设置一个全新的项目交流赛。
机器人足球竞赛规则
附件3机器人足球竞赛规则该规则适用于全国活动决赛中2对2和1对1对抗赛,不同之处有注明。
小学组为1对1竞赛,初中组和高中组为2对2竞赛。
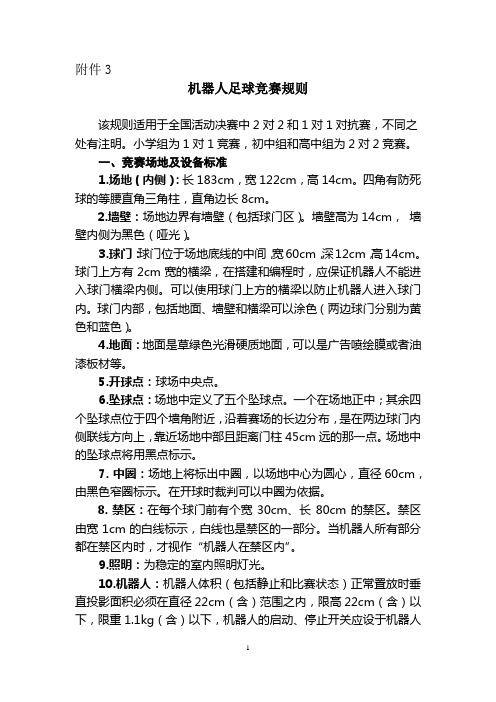
一、竞赛场地及设备标准1.场地(内侧):长183cm,宽122cm,高14cm。
四角有防死球的等腰直角三角柱,直角边长8cm。
2.墙壁:场地边界有墙壁(包括球门区)。
墙壁高为14cm,墙壁内侧为黑色(哑光)。
3.球门:球门位于场地底线的中间,宽60cm,深12cm,高14cm。
球门上方有2cm宽的横梁,在搭建和编程时,应保证机器人不能进入球门横梁内侧。
可以使用球门上方的横梁以防止机器人进入球门内。
球门内部,包括地面、墙壁和横梁可以涂色(两边球门分别为黄色和蓝色)。
4.地面:地面是草绿色光滑硬质地面,可以是广告喷绘膜或者油漆板材等。
5.开球点:球场中央点。
6.坠球点:场地中定义了五个坠球点。
一个在场地正中;其余四个坠球点位于四个墙角附近,沿着赛场的长边分布,是在两边球门内侧联线方向上,靠近场地中部且距离门柱45cm远的那一点。
场地中的坠球点将用黑点标示。
7.中圈:场地上将标出中圈,以场地中心为圆心,直径60cm,由黑色窄圈标示。
在开球时裁判可以中圈为依据。
8.禁区:在每个球门前有个宽30cm、长80cm的禁区。
禁区由宽1cm的白线标示,白线也是禁区的一部分。
当机器人所有部分都在禁区内时,才视作“机器人在禁区内”。
9.照明:为稳定的室内照明灯光。
10.机器人:机器人体积(包括静止和比赛状态)正常臵放时垂直投影面积必须在直径22cm(含)范围之内,限高22cm(含)以下,限重1.1kg(含)以下,机器人的启动、停止开关应设于机器人上方。
根据机器人电源连接方式不同(串联或并联),一台机器人使用的所有电源的总输出不得超过9V(即2串锂聚合物电池或6节干电池),不得使用升压、稳压装臵。
每台机器人的电源都必须有一个接口,以便测量电压,除非该机器人的电源从外观和连接方式能明显看出它的电压。
football机器大赛大纲

football机器大赛大纲机器人足球赛参赛队规则1.每支参赛队由2名学生队员和1名教练组成。
2.比赛时只允许两名学生队员进入竞赛区(包括准备区和比赛区),教练不得进入竞赛区。
3.在通常情况下,不允许参赛队员任意移动机器人。
每场比赛前,参赛队应指派一名队员担当队长,在规则允许范围内或在裁判员的指示下负责拿走、移动、重新放置机器人。
4.参赛队员应熟知比赛的有关规定,所有活动及行为必须遵循规则,服从赛场工作人员的指示。
机器人足球赛比赛赛制机器人足球比赛按小学、初中、高中三个组别分别进行初赛和复赛。
初赛:分组循环赛。
胜方积3分,负方积0分;如果平局,双方各积1分。
按分组循环赛的积分确定出线的参赛队,如果出现积分并列,按累计进球数确定先后,如果仍然并列,再按累计净胜球数确定先后。
复赛:淘汰赛,决出冠、亚、季军(并列)。
复赛中如果出现平局,该场比赛将加时,直至某一队有1个有效进球,该队即为获胜队。
若加时3分钟后双方均无进球,则在两个半场及加时赛中离场总次数少的队获胜;如双方离场次数仍相同,则机器人总重量轻的队获胜。
组委会有可能根据参赛报名和报到情况变更初赛和复赛赛制,如有变化,将在初赛开始前公布。
2.赛前准备3.参赛队在进入准备区前0.5小时检录,在准备区调试机器人(60分钟)。
参赛队可携带维修用的备件和便携式计算机。
4参赛机器人应在准备区接受尺寸和重量的检查。
被检查的机器人应直立,任何突出部分应充分展开。
如果机器人某个可动部件能伸展,该机器人必须在运行状态下接受检查。
裁判员将逐个测量机器人的重量和尺寸。
5.允许在限定时间内对不合格的机器人加以调整,调整时间不得超过20分钟且不能影响正式比赛的安排。
如果修改后的机器人仍不符合要求,将取消比赛资格。
6.比赛期间机器人若有修改,必须再次接受检查。
7.进入比赛区8.根据赛程的安排,参赛队应于开赛前3分钟在引导员带领下进入比赛区候场。
进入比赛区前,领取专用电池并进行必要的检测。
稿虚拟机器人足球虚拟足球赛项培训

市场潜力:随着人们对足球运动的热爱和关注,虚拟机器人足球赛项的市场潜力巨大
挑战:需要解决技术难题,如虚拟机器人的控制、人工智能算法的优化等,同时还需要面对市场竞争和资金投入等问题。
技术进步:人工智能、机器学习等技术的发展将推动虚拟机器人足球的发展
应用领域:虚拟机器人足球将在教育、娱乐、科研等领域得到更广泛的应用
智能化:机器人足球运动员的智能化程度不断提高
场景丰富:虚拟足球赛项的场景将更加丰富多样
普及化:虚拟机器人足球赛项将逐渐普及,成为一项大众化的运动
教育价值:虚拟机器人足球赛项可以培养学生的创新思维和实践能力,具有很高的教育价值
技术进步:人工智能、虚拟现实等技术的发展为虚拟机器人足球赛项提供了更多可能性
培养创新思维和实践能力
促进国际交流与合作
推动机器人足球产业发展
熟悉虚拟足球赛项规则
掌握虚拟足球赛项操作界面
学习虚拟足球赛项基本操作
提高虚拟足球赛项技巧和策略
战术分析:分析对手的战术特点和弱点,制定相应的应对策略
战术运用:在比赛中灵活运用战术,根据比赛情况调整战术
战术训练:通过模拟比赛进行战术训练,提高队员的战术意识和执行力
比赛形式:虚拟机器人足球赛项采用虚拟足球比赛形式,参赛队伍通过编程控制虚拟机器人进行比赛。
比赛场地:比赛场地为虚拟足球场,由计算机模拟生成。
比赛时间:比赛分为上半场和下半场,每半场20分钟,中场休息10分钟。
比赛规则:比赛规则与真实足球比赛规则基本相同,包括越位、犯规、点球等。
提高人工智能技术水平
培养人才:培养专业的虚拟机器人足球人才,包括教练、球员、裁判等
汇报人:
机器人路径规划:根据环境信息规划机器人的运动路径,包括最短路径、最优路径等
“牛牛”机器人足球仿真大赛培训之规则介绍 邵振洲
2007-12-8
"牛牛"机器人足球仿真大赛培训
28
(d)门线与门区 门线是恰好位于球门前长40cm 的直线。门 区 包括位于球门前尺寸为50cm×15cm 的长方形 区域。 (e)罚球区 罚球区球门前尺寸为80cm×35cm 的长方形 区域,弧形区域平行于球门线长度为25cm ,垂直 于球门线高度为5cm。 (f)球 用桔黄色的高尔夫球作比赛用球,直径 42.7mm,重46g。 (g)机器人 机器人为7.5cm×7.5cm×4.5cm 的小车机 器人。
MSRS仿真比赛目前主要有三种比赛形式,
涵盖FIFA和RoboCup的所有仿真比赛项目。
2007-12-8
"牛牛"机器人足球仿真大赛培训
5
3V3仿真比赛规则
2007-12-8
"牛牛"机器人足球仿真大赛培训
6
2007-12-8
"牛牛"机器人足球仿真大赛培训
7
5V5仿真比赛规则
2007-12-8
"牛牛"机器人足球仿真大赛培训
2007-12-8
"牛牛"机器人足球仿真大赛培训
19
2007-12-8
"牛牛"机器人足球仿真大赛培训
20
7. 争球FB (Free Ball)
在球门区外出现僵局达10秒钟。 与对方球的机器人相撞,不论是否是故意的,如 果裁判员认定这种冲撞直接影响了比赛,则在犯规 方的半场进行争球。
2007-12-8
3
MSRS仿真比赛硬件要求
硬件名称 CPU 内存 显卡 硬盘 规格 P4 1.6G 或更高 256M 或更大 显存128M以上 10G 硬盘剩余空间
3.0.机器人足球比赛
1 .简单足球的环境和规则
• 游戏规则:两个队:红队和蓝队。每队有4 个场上队员和一个守门员。足球活动区域四 边被墙围住,故球不会出界,但会从墙上回 弹。没有角球、没有头球、没有越位。
• 游戏目标:尽可能多进球。球踢过对方球门 线就算进球。 • 游戏环境:1个足球场、2个球门、1个球、2 个球队、8个场上队员、2个守门员。
void SoccerPitch::Update() { if (m_bPaused) return; static int tick = 0; //update the balls m_pBall->Update(); //update the teams m_pRedTeam->Update(); m_pBlueTeam->Update(); //if a goal has been detected reset the pitch ready for kickoff if (m_pBlueGoal->Scored(m_pBall) || m_pRedGoal->Scored(m_pBall)) { m_bGameOn = false; //reset the ball m_pBall->PlaceAtPosition(Vector2D((double)m_cxClient/2.0, (double)m_cyClient/2.0)); //get the teams ready for kickoff m_pRedTeam->GetFSM()->ChangeState(PrepareForKickOff::Instance()); m_pBlueTeam->GetFSM()->ChangeState(PrepareForKickOff::Instance()); } }
机器人大赛规则解释
机器人大赛规则解释l RoboCup足球机器人仿真组(2D、3D)仿真组比赛类似FIFA系列足球游戏,比赛由程序自主控制,完全模拟真人比赛,可设定阵形、战术、体力消耗等一系列参数。
比赛上下半场各5分钟,由电脑裁判进行在线裁定。
三维仿真与二维仿真相比,实现了对空间的模拟实战,使比赛更加激烈,更具观赏性。
l RoboCup足球机器人小型组比赛在5.5m×4m的绿色地毯场地上进行,采用桔黄色的高尔夫球作为比赛用球,每队由5个机器人组成。
机器人的体积不超过180cm2,高度不超过150mm。
机器人拥有控球、击球装置,可以和赛场外的计算机进行无线通信。
比赛规则与一般足球相似,有点球、任意球、门球、犯规、红黄牌等,上下半场各10 分钟。
l RoboCup足球机器人中型组(2:2 4:4)中型组比赛分为每队2个和每队4个机器人两种不同类型,使用橙色的国际足联标准5号用球,上下半场各10分钟。
机器人的尺寸不超过0.5m×0.5m ×0.8m,在比赛过程中完全自主控制。
l RoboCup足球机器人四腿组四腿机器人足球赛统一使用Sony公司生产的“爱宝”(AIBO)机器狗作为比赛专用机器人,比赛在4.2m×2.8m的绿色场地上进行。
比赛双方各有四个机器人上场,上下半场各10分钟,队员之间可以进行无线通讯,但禁止任何形式的远程控制,从而保证每一支球队都是一个独立系统。
l RoboCup足球机器人类人组比赛以各队自己开发的人形机器人作为比赛专用机器人,分为规定动作部分和自由发挥部分。
规定动作包括单腿站立一分钟、行走、踢球、点球比赛等,自由发挥部分,每队有5分钟时间展示机器人的各个动作,由裁判从技术和艺术两方面进行评分。
l RoboCup救援组比赛“灾难营救”是个重要的社会议题,机器人营救项目在模拟的事故现场寻找及营救受害者,分仿真组和机器人组两个组别。
旨在激发研究创意,使得机器人可以取代人力,在恶劣的环境下进行营救工作。