基于DSP和ARM的0.02级交直流多功能标准表的设计
《DSP原理及应用》课程实验报告
[《DSP原理及应用》课程实验报告](软、硬件实验)实验名称:[《DSP原理及应用》实验]专业班级:[ ]学生姓名:[ ]学号:[ ]指导教师:[ ]完成时间:[ ]目录第一部分.基于DSP系统的实验 (1)实验3.1:指示灯实验 (1)实验3.2:DSP的定时器 (3)实验3.5 单路,多路模数转换(AD) (5)第二部分.DSP算法实验 (13)实验5.1:有限冲击响应滤波器(FIR)算法实验 (13)实验5.2:无限冲激响应滤波器(IIR)算法 (17)实验5.3:快速傅立叶变换(FFT)算法 (20)第一部分.基于DSP系统的实验实验3.1:指示灯实验一.实验目的1.了解ICETEK–F2812-A评估板在TMS320F2812DSP外部扩展存储空间上的扩展。
2.了解ICETEK–F2812-A评估板上指示灯扩展原理。
1.学习在C语言中使用扩展的控制寄存器的方法。
二.实验设备计算机,ICETEK-F2812-A实验箱(或ICETEK仿真器+ICETEK–F2812-A系统板+相关连线及电源)。
三.实验原理1.TMS320F2812DSP的存储器扩展接口存储器扩展接口是DSP扩展片外资源的主要接口,它提供了一组控制信号和地址、数据线,可以扩展各类存储器和存储器、寄存器映射的外设。
-ICETEK–F2812-A评估板在扩展接口上除了扩展了片外SRAM外,还扩展了指示灯、DIP开关和D/A设备。
具体扩展地址如下:C0002-C0003h:D/A转换控制寄存器C0001h:板上DIP开关控制寄存器C0000h:板上指示灯控制寄存器详细说明见第一部分表1.7。
-与ICETEK–F2812-A评估板连接的ICETEK-CTR显示控制模块也使用扩展空间控制主要设备:108000-108004h:读-键盘扫描值,写-液晶控制寄存器108002-108002h:液晶辅助控制寄存器2.指示灯扩展原理3.实验程序流程图开始初始化DSP时钟正向顺序送控制字并延时四.实验步骤1.实验准备连接实验设备:请参看本书第三部分、第一章、二。
基于DSP和ARM的嵌入式多媒体通信终端的设计与实现
i t ra e b t e u lp o e s r r o u e . F n l n e f c e we n d a r c s o s a e f c s d i a l t e s fwa ea c i c u e i n r d c d y, h o t r r h t t r s i to u e . e Ke wo d : e e d d s se , m u t d a t r ia , DS y rs mb d e y tm li me i e m n l P, ARM .
维普资讯
第 2 卷 第 2期 9
20 0 6年 4月
电
子
测
量
技
术
EL ECTRONI M EAS C UREM ENT TECH N0LOGY
基 于 D P和 ARM 的 嵌 入 式 多 媒 体 S 通 信 终 端 的 设 计 与 实 现
王 健 陈启 关 章 德
( 京 大 学 南京 2 0 9 ) 南 10 3
摘
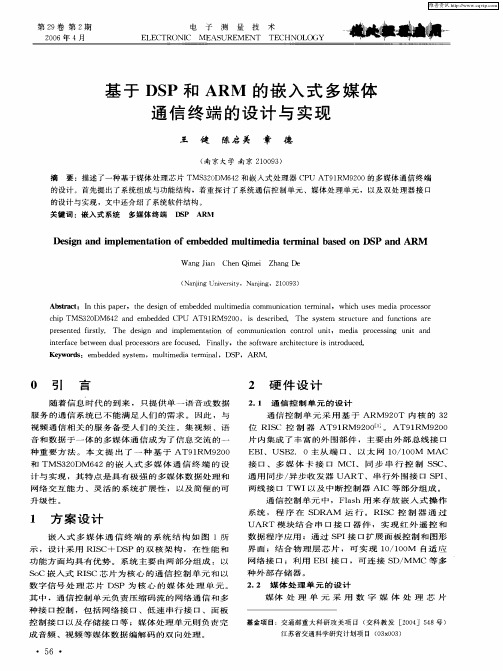
要 :描述 了一种基 于媒 体处理 芯片 T 3 0 MS 2 DM6 2和嵌 入式处理 器 C U 9 R 2 0的 多媒体通 信终 端 4 P AT 1 M90
的设 计 。首先提 出了系统组 成与功能结构 ,着重探 讨 了系统通信 控制 单元 、媒 体处理 单元 ,以及双 处理器 接 口 的设 计与实现 ,文 中还介绍 了系统软件结构 。
系统 ,程 序 在 S DRA M 运 行 。 RI C 控 制 器 通 过 S
1 方 案 设 计
嵌 入 式 多 媒 体 通 信 终 端 的 系 统 结 构 如 图 1所
示 , 设 计 采 用 RI C+ DS 的 双 核 架 构 , 在 性 能 和 S P
PDM-820AC多功能表

PDM-820AC多功能表1、概述PDM-820AC多功能表用于测量三相电流、三相电压、功率因数、频率;显示采用数码管或液,可以同时显示4种电力参数,不需要切换;适用于高压进线柜、高压电容器柜、低压进线柜、低压电容器柜等;精度高、稳定性好、测量范围广、变比可任意设定,具有通讯功能,支持全数字校表,无可调电位器,具有很高的性价比。
3、附件:数字通讯SD96-E3提供串行异步半双工RS485 通讯接口,各种数据讯息均可在通讯线路上传送。
在一条线路上可以同时连接多达247个网络电力仪表,每个网络电力仪表均可设定其通讯地址(Address No.),不同系列仪表的通讯接线端子号码不同,通讯连接应使用带有铜网的屏蔽双绞线,线径不小于0.5mm2。
布线时应使通讯线远离强电电缆或其他强电场环境,推荐采用T 型网络的连接方式1,不建议采用星形或其他的连接方式。
主机查询:查询消息帧包括设备地址、功能代码、数据信息码、校准码。
地址码表明要选中的从机设备;功能代码告之被选中的从设备要执行何种功能,例如功能代码03或04 是要求从设备读寄存器并返回它们的内容;数据段包含了从设备要执行功能的任何附加信息,校验码用来检验一帧信息的正确性,从设备提供了一种验证消息内容是否正确的方法,它采用CRC16 的校准规则。
从机响应:如果从设备产生一正常的回应,在回应消息中有从机地址码、功能代码、数据信息码和CRC16 校验码。
数据信息码则包括了从设备收集的数据:像寄存器值或状态。
如果有错误发生,我们约定是从机不进行响应。
传输方式是指一个数据帧内一系列独立的数据结构以及用于传输数据的有限规则,下面定义了与MODBUS 协议– RTU 方式相兼容的传输方式。
我们规定在本系列仪表中采用2种通讯数据字节格式(BYTE);方式1:10位数据通讯(1 个起始位、8 个数据位、1个停止位),对应参数整定为项目8,DATA菜单中选择0b8d;方式2:11位数据通讯(1个起始位、8 个数据位、2个停止位),对应参数整定为项目8,DATA菜单中选择9b8d。
基于STM32的数控可调直流电源设计
第37卷第4期2023年7月兰州文理学院学报(自然科学版)J o u r n a l o fL a n z h o uU n i v e r s i t y ofA r t s a n dS c i e n c e (N a t u r a l S c i e n c e s )V o l .37N o .4J u l .2023收稿日期:2023G03G10基金项目:淮南师范学院自然科学研究重点项目(2022X J Z D 026);教育部产学合作协同育人项目(220906517261925)作者简介:戴文俊(1987G),男,安徽长丰人,讲师,硕士,研究方向为电力电子与电气传动控制.E Gm a i l :a w j k a o ya n @163.c o m.㊀㊀文章编号:2095G6991(2023)04G0074G05基于S TM 32的数控可调直流电源设计戴文俊,胡艳丽,阚绪月(淮南师范学院机械与电气工程学院,安徽淮南232038)摘要:为了提高电源的输出电压精度和减小负载调整率,采用S TM 32单片机作为控制核心设计数控可调电源.硬件包括主电路㊁驱动电路㊁控制电路㊁检测电路㊁辅助电源电路㊁液晶显示电路和保护电路.单片机通过检测电路采集输出电压和电流信号,采用模糊自适应P I D 和P WM 算法控制输出电压达到期望值并趋于稳定.实验测试结果显示:本数控电源空载输出电压精度达99.4%,负载输出电压精度为98%,且具有输出电压双向可调㊁步进幅度可设置㊁实时显示和保护等功能.关键词:S TM 32;可调直流电源;模糊自适应P I D ;数控中图分类号:T N 86;T P 368.1㊀㊀㊀文献标志码:AD e s i g no fN u m e r i c a l C o n t r o lA d j u s t a b l eD CP o w e r S u p p l y Ba s e do nS T M 32D A IW e n Gj u n ,HUY a n Gl i ,K A N X u Gyu e (S c h o o l o fM e c h a n i c a l a n dE l e c t r i c a l E n g i n e e r i n g ,H u a i n a nN o r m a lU n i v e r s i t y,H u a i n a n232038,A n h u i ,C h i n a )A b s t r a c t :I no r d e r t o i m p r o v e t h e o u t p u t v o l t a g e a c c u r a c y o f t h e p o w e r s u p p l y an d r e d u c e t h e l o a d a d j u s t m e n t r a t e ,S T M 32s i n g l e c h i p m i c r o c o m p u t e r i s u s e da s t h e c o n t r o l c o r e t od e s i gn t h eN Ca d j u s t a b l e p o w e r s u p p l y.T h eh a r d w a r e i n c l u d e sm a i nc i r c u i t ,d r i v ec i r c u i t ,c o n t r o l c i r c u i t ,d e t e c t i o n c i r c u i t ,a u x i l i a r yp o w e r c i r c u i t ,l i q u i dc r y s t a l d i s p l a y c i r c u i t a n d p r o t e c t i o n c i r c u i t .T h e s i n g l e c h i p m i c r o c o m p u t e r c o l l e c t s t h e o u t p u t v o l t a g e a n d c u r r e n t s i g n a l t h r o u gh t h e d e t e c t i o n c i r c u i t ,a n du s e s f u z z y a d a p t i v eP I Da n dP WMa l g o r i t h m s t o c o n t r o l t h eo u t p u t v o l t a g e t o r e a c h t h e e x p e c t e d v a l u e a n d t e n d s t o b e s t a b l e .T h e e x pe r i m e n t a l r e s u l t s s h o wt h a t t h e p r e c i s i o nof n o Gl o a d o u t p u t v o l t ag e i s 99.4%,th e p r e ci s i o n o f l o a d o u t p u t v o l t a ge i s 98%.I t h a s t h ef u n c t i o n s o f b i d i r e c t i o n a l a d j u s t a b l e o u t p u t v o l t ag e ,a d j u s t a b l e s t e p a m p l i t u d e ,r e a l Gt i m e d i s p l a y an d p r o t e c t i o n .K e y w o r d s :S T M 32;a d j u s t a b l eD C p o w e r s u p p l y ;f u z z y a d a p t i v eP I D ;n u m e r i c a l c o n t r o l ㊀㊀电源是各种电子设备必不可少的组成部分,其性能的优劣直接关系到整个设备的安全性与可靠性指标.随着科技的发展,各种先进设备已经普及到生产㊁生活和科研等各个领域,也对电源的精度和性能有了更高的要求,因此,许多设备逐渐采用高精度的数控电源,比如在电力通信领域,通信电源是各种电力数据采集㊁远程控制等终端设备的能源保障[1G2];U P S 电源在轨道交通领域的作用是保障列车运行的信号系统安全㊁稳定和可持续工作[3G4].数控直流电源的设计与开发主要集中在控制芯片㊁电源变换原理等方面.在控制芯片方面,大部分采用基于冯诺依曼结构的8051系列单片机.文献[5G6]采用A T M E L 公司的51系列单片机,文献[7G8]采用中国宏晶科技公司的51系列单片机,文献[9]采用意法半导体公司S T M8单片机,文献[10]采用A T M E L公司的A V R单片机.上述控制芯片均为8位元的单片机,属于入门级控制芯片,在数据处理方面,精度有限.所以一些A R M芯片和数字信号处理器被应用到数控电源的设计中.文献[11]所设计的便携式数控直流电源采用基于A R M C o r t e x内核的S T M32控制器,其在电源设计中可以采用更优的控制技术,发挥更高的性能.在电源变换原理方面,主要分为D/A转换芯片和电力电子变换电路两大类[5G6,8,10G11].经D/A转换芯片转换成模拟量,再通过集成运算放大器构成调理电路产生直流电压,采用独立按键调整单片机数字量值从而调节电压的输出值.这种变换方法一般是对于电压固定的直流电源进行变换,产生可调的电压值,且输出范围比较小,功率取决于提供的直流电源,控制方式一般采用开环控制,不能做到动态调整,精度较低.文献[9,12G13]采用的是基于电力电子开关器件构成的变换电路,一般采用A CGD CGD C变换方式,将输入的工频50H z的220V的交流电源进行整流(A CGD C变换),在经过变换电路(D CGD C)实现电压调节.这种电源变换需要根据实时检测的输出实际电压与设定值的误差调节控制变换电路开关器件导通和关段的控制脉冲.这种方法称为脉宽调制技术(P WM),属于闭环控制,精度较高,可实现大功率输出.根据以上文献综述,本文基于高性能单片机S T M32和电力电子器件实现数控可调电源的硬件电路设计;基于模糊自适应P I D控制算法和P WM技术实现动态调节和减小输出电压误差,提高精度.1㊀电源电路硬件设计1.1㊀电源电路结构本电源将电压值220V㊁频率50H z的输入交流电通过变压器转换为同频率的26V交流电,再通过整流桥和滤波电容器获得36V直流电(A CGD C).经直流调压电路按照设定值控制输出(D CGD C),采用O L E D液晶显示屏,实时显示电压设定值㊁输出值和电流值.电源硬件结构如图1所示.图1中,检测电路采用串联分压的方式采集电压,采用1Ω电阻作为采样电阻,检测电流转换为电压信号,利用单片机的A D转换功能,实现检测输出电压和电流的功能.工作电源电路通过三端稳压芯片78L05将12V的输入电源经过渡为5V输出,再经AM S1117低压降稳压器转为3.3V给单片机供电,同时12V的输入电源也为直流调压电路的开关管控提供驱动电压.图1㊀电源硬件结构1.2㊀驱动电路设计驱动电路的原理如图2所示.当S T M32单片机控制电路产生的P WM信号的3.3V高电平进入驱动电路时,驱动电路输出15V的电压给N M O S的栅极,使N M O S导通;当S T M32单片机控制电路产生的P WM信号的0V低电平进入驱动电路时,驱动电路输出-7V的电压给N M O S的栅极,使N M O S关断.P WM1和P WM2分别接S T M32单片机的P A7和P C6端口.1.3㊀直流调压电路设计直流调压电路采用半桥电路,如图3所示.整流电路输出的36V直流电压接入主电路中,通过驱动芯片I R2101S输出信号控制型号为I R F640的NMO S管的导通与关断.当I R F640栅极为高电平时导通,低电平时关断.同时设计了输出电压L C滤波电路,保证输出电压无杂波影响.1.4㊀故障保护电路设计保护电路如图4所示,主要针对欠压㊁过压及57第4期戴文俊等:基于S TM32的数控可调直流电源设计图2㊀驱动电路原理图3㊀直流调压电路原理图4㊀故障保护电路结构过流等故障现象对主电路进行保护.当发生故障时,故障保护电路会产生一个低电平,S T M 32对应的外部中断引脚的高电平被拉低,触发中断信号,S TM 32将进入中断保护程序.在中断保护程序中,P WM 信号的输出被关闭,P WM 输出设置变为高阻态并保持低电平,I G B T 功率器件将处于关闭状态,保护三极管处于断开状态,主电路将会一直被及时有效保护.硬件自动完成整个故障保护触发过程,能快速准确地应对和处理各种故障状态.根据原理图绘制P C B ,通过制板焊接完成数控电源如图5所示.图5㊀数控直流电源实物2㊀控制策略将设定电压值与检测到的实际电压值之间的偏差及偏差的变化值输入到模糊自适应P I D 控制器获取P WM 信号的占空比值,然后动态调节P WM 信号控制D C GD C 变换电路开关的通断,实现电压调节.控制策略结构如图6所示.图6㊀控制策略结构㊀㊀模糊自适应P I D 控制算法的表达式可表示为[14]:ut ()=k p 0+Δk p ()et()+k i 0+Δk i ()ʏt0et ()d t +k d 0+Δk d ()d et()d t,(1)式中,k p 0,k i 0和k d 0为PI D 控制算法的初始参数;67㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀兰州文理学院学报(自然科学版)㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第37卷Δk p ,Δk i 为和Δk d 为去模糊化后输出的P I D 在线实时调整参数.基于上述算法,本电源的软件控制流程如图7所示.图7㊀数控直流源控制程序流程3㊀测试结果与分析3.1㊀空载输出电压测试将数字万用表接在输出端口两侧,测量电路实际输出电压,观察电路输出电压大小与预期值是否符合.共进行了3次空载试验.各试验的电压范围为5V~30V ,设定电压调整步长为1V.详细的测试数据如表1所列.测试1的11V 设定值㊁测试2的20V 设定值和测试3的26V 和30V 设定值的测试结果如图8所示.图8㊀空载实验部分测试结果表1㊀空载输出电压试验结果(单位:V )设定电压测试1输出电压绝对误差测试2输出电压绝对误差测试3输出电压绝对误差55.050.055.020.025.010.0166.020.026.020.026.030.0377.030.037.040.047.030.0388.040.048.050.058.040.0499.030.039.030.039.060.061010.010.0110.030.0310.040.041111.030.0311.040.0411.040.041212.040.0412.060.0612.050.051313.060.0613.050.0513.030.031414.050.0514.060.0614.050.051515.070.0715.060.0615.070.071616.060.0616.080.0816.060.061717.080.0817.070.0717.080.081818.070.0718.090.0918.090.091919.10.119.090.0919.10.12020.090.0920.090.0920.080.082121.10.121.10.121.10.12222.10.122.050.0522.060.062323.120.1223.090.0923.080.082424.120.1224.110.1124.10.12525.130.1325.120.1225.110.112626.120.1226.130.1326.130.132727.140.1427.130.1327.120.122828.10.128.170.1728.190.192929.160.1629.140.1429.160.163030.130.1330.150.1530.170.17㊀㊀表1所列的测试数据中,实际输出电压值与期望值之间的绝对误差最小值为0.01V ,最大值为0.17V.根据表中的数据计算每个输出电压的平均绝对误差和平均相对误差,绘制两类误差曲线,如图9和图10所示,并对误差曲线进行线性回归统计.图9㊀空载输出电压绝对误差曲线77第4期戴文俊等:基于S TM 32的数控可调直流电源设计图10㊀空载输出电压相对误差曲线㊀㊀图9的误差曲线显示,电压的绝对误差随输出电压值的增加而增大.根据图10所示的相对误差曲线,该电源的相对误差在0.3%~0.6%之间,精度较高.3.2㊀负载输出电压测试将直流电动机作为负载连接到输出端口,用数字万用表与直流电动机并联测量输出的实际电压值,观察电源的输出电压是否与负载的期望值一致.测试数据采集结果如表2所列.设定电压为5V 和8V 来测量电压和电流,测试结果如图11所示.根据表2所示的负载测试数据,当负载输出电压在5V~10V 之间时,绝对误差为0.05V~0.15V ,相对误差小于2%.表1中的空载试验数据显示,当空载输出电压在5V~10V 之间时,绝对误差为0.01V~0.14V.对比表明,负载电压误差大于空载电压误差,这是由于电路中负载电流增加造成的电压降,属于一种正常现象.负载下输出电压的相对误差小于2%,说明负载调整率较小,精度较高.表2㊀负载输出电压试验结果设定电压/V 输出电压/V测量电流/m A绝对误差/V相对误差54.95151.50.051.00%65.93317.60.071.17%76.87251.60.131.86%88.02227.20.020.25%99.05208.30.050.56%109.85200.50.151.50%图11㊀负载试验部分测试结果4㊀结论本文采用S T M 32单片机为主控芯片,设计了包括主电路㊁驱动电路㊁控制电路㊁检测电路㊁辅助电源电路㊁液晶显示电路和保护电路的数控电源硬件电路.单片机通过检测电路采集输出电压和电流信号构成闭环控制,采用模糊自适应P I D 和P WM 算法的调节控制提高了输出电压的精度,且具有输出电压双向可调㊁步进幅度可设置㊁实时显示和保护等功能,可以为各种工作电压的精密直流电器提供工作电源.参考文献:[1]陈丽娟.变电站通信电源综合监控系统的设计[J ].光源与照明,2022(11):134G136.[2]周荣娴.电力通信机房中智能通信电源实施与应用[J ].电子技术与软件工程,2022(21):99G102.[3]王颖,李新,冯前进,等.城市轨道交通信号U P S 电源系统优化配置方案[J ].铁路通信信号工程技术,2022,19(8):62G67.[4]黄俊.地铁车站U P S 电源整合方式和容量确定[J ].智能城市,2022,8(11):49G51.[5]吴彤,孙广辉.基于A T 89S 52的数控直流电源设计[J ].电子测试,2021(13):37G39.[6]胡城瑜.探析单片机的数控直流稳压电源设计与实现[J ].电子测试2017(3):13G14.[7]钟成,池尚霏.基于单片机的数控直流稳压电源的设计与实现[J ].现代信息科技,2019,03(3):38G40.[8]胡维庆,颜建军,刘哲纬.数控式直流电源设计[J ].价值工程,2015,24(15):70G72.[9]程习敏,刘华.数控直流电源设计[J ].技术创新与应用,2018(27):40G41.[10]张丽.精密数控直流电源的设计[J ].电子世界,2016(21):63G64.[11]张红宾,李晓晨,赵二刚,等.基于S TM 32的便携式数控直流电源设计[J ].实验室科学,2019,22(3):53G56.[12]王瑜.数控可调不间断直流电源设计[D ].芜湖:安徽工程大学,2017.[13]岑祺.基于多功能双向直流变换的零碳模块化电源[J ].电信快报,2023(1):24G29.[14]戴文俊,范鹏飞,凌有铸,等.模糊自适应P I D 控制器在无刷直流电机控制系统中的应用研究[J ].安徽工程大学学报,2012,27(1):64G67.[责任编辑:李㊀岚]87㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀兰州文理学院学报(自然科学版)㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第37卷。
基于单片机的数字电压表的课程设计
目录1 引言 (2)2 设计原理及要求 (2)3 软件仿真电路设计 (2)3.1 设计思路 (3)3.2 仿真软件简介 (3)3.2.1 Proteus 6 Professional (3)3.2.2 Keil uVision2 (3)3.3设计过程 (3)4 硬件设计 (4)4.1单片机控制模块设计 (4)4.1.1时钟电路 (4)4.1.2复位电路 (4)4.2 A/D转换模块设计 (5)4.2.1 ADC0808简介 (5)4.2.2 A/D转换电路设计 (6)4.3 显示模块设计 (7)4.3.1 LCD显示模块 (7)4.3.2 LCD1602的引脚功能 (7)4.3.3 LCD1602的显示操作 (7)5系统软件程序的设计 (11)5.1主程序设计 (11)5.2 A/D转换程序 (11)6 系统仿真 (12)7 结论 (13)参考文献 (14)附录1 (15)附录2 (20)1 引言随着微电子技术的不断发展,微处理器芯片的集成程度越来越高,单片机已可以在一块芯片上同时集成CPU、存储器、定时器/计数电路,这就很容易将计算机技术与测量控制技术结合,组成智能化测量控制系统。
数字电压表(DigitalVoltmeter)简称DVM,它是采用数字化测量技术,把连续的模拟量(直流输入电压)转换成不连续、离散的数字形式并加以显示的仪表。
与此同时,由DVM扩展而成的各种通用及专用数字仪器仪表,也把电量及非电量测量技术提高到崭新水平。
本章重点介绍A/D 转换器以及由它们构成的基于单片机的数字电压表的工作原理。
电压表的数字化测量,关键在于如何把随时连续变化的模拟量转化成数字量,完成这种转换的电路叫模数转换器(A/D)。
数字电压表的核心部件就是A/D转换器。
它是利用A/D转换电路将待测的模拟信号转换成数字信号,通过相应换算后将测试结果以数字形式显示出来的一种电压表。
较之于一般的模拟电压表,数字电压表具有精度高、测量准确、读数直观、使用方便等优点。
【毕业论文选题】信号处理本科毕业论文题目

信号处理本科毕业论文题目信号处理是对各种类型的电信号,按各种预期的目的及要求进行加工过程的统称。
人们为了利用信号,就要对它进行处理。
例如,电信号弱小时,需要对它进行放大;混有噪声时,需要对它进行滤波I当频率不适应于传输时,需要进行调制以及解调;信号遇到失真畸变时,需要对它均衡;当信号类型很多时,需要进行识别等等。
以下是信号处理本科毕业论文题目,欢迎大家阅读。
信号处理本科毕业论文题目一:1、拖拉机发动机燃油喷射系统优化--基于CFD技术和自适应振动信号处理2、农用汽车发动机状态监测系统与诊断方法研究3、基于无GPS定位的变量施肥控制系统的研究4、基于累加分类的ADS-B交织信号处理方法5、舰载雷达信号处理器系统硬件设计6、船舶通信系统中的数字阵列实时信号处理算法7、海杂波信号降噪处理中的小波阈值算法研究8、自适应数字波束并行信号处理实现9、一种植入式神经元记录系统信号处理电路10、多速率信号处理技术在机载通用采集器中的应用11、一种高精度太阳方位检测装置设计与信号处理12、基于MPC8640D的软件化雷达通用信号处理软件设计13、全光多输入多输出信号处理中光采样耦合器的优化14、数字信号处理技术在电子测量仪器领域上的应用15、基于时域分段处理的单频信号检测算法分析16、声发射信号处理与分析方法探究117、电子侦察信号处理技术研究18、一种基于子孔径处理的双侧TOPSAR成像信号处理算法19、基于多级维纳滤波器的空时自适应信号处理及其在无线通信系统中的应用20、基于形态复合滤波的汽油辛烷值测试中的爆震信号处理21、改进小波阈值函数在管道泄漏信号处理中的应用22、基于泄漏电缆导波雷达周界入侵信号处理方法研究23、台阵处理技术和模板匹配滤波技术在微弱地震信号检测中的应用24、核电厂显示控制系统信号滤波处理算法选择研究25、阵列信号处理在雷达和移动通信中的应用研究26、现代雷达信号处理及发展趋势探讨27、短时傅里叶变换在船舶欠定稀疏源信号盲分离中的应用28、模糊聚类在雷达频率信号目标检测处理中的应用29、基于小波变换的地铁信号处理方法研究30、一种堆叠式小型高速信号处理模块的热分析研究31、一种BDS卫星导航数字中频信号源的设计32、基于EDFA的卫星相干光通信开环补偿技术研究33、基于时频图像处理方法的多分量信号分离34、基于FPGA的腔衰荡信号采集与处理系统设计35、基于高阶Ambisonics的236、低频长脉冲信号激励下目标弹性波的一种增强处理方法信号处理本科毕业论文题目二:37、基于空域相关阈值滤波的雾气激光信号处理算法38、语音信号处理中鲁棒性压缩感知关键技术39、相干信号波达方向估计技术综述240、铁路路基病害检测雷达信号中的强干扰谱分析及滤波处理41、基于LMS算法的粉尘静电信号处理42、地面增强系统导航信号源的设计与实现43、铁路信号25Hz相敏轨道电路故障处理44、35CrMo钢冲蚀磨损的磁记忆检测信号定量研究45、中波发射机播出信号失真故障的分析与处理46、基于OFDM的雷达通信一体化信号处理技术研究47、多波形数字信号发生器的研究及实现48、基于降维空时自适应信号处理的多阵元宽带干扰抑制方法49、新型医学信号处理实验平台的设计与实现50、基于分层处理的短码直扩信号盲解扩算法51、基于通信方式的语言信号处理研究52、变压器局放超声信号特征参数提取与处理方法研究53、现代数字信号处理的应用和发展前景54、电子信息工程综合实践中信号处理系统的应用55、高频地波雷达实时信号并行处理方案及实现56、数字信号处理技术的应用与发展57、一种宽带多维雷达信号的处理方法与时频分析58、基于DSP和ARM的电能质量监测系统59、基于全去斜率接收技术的雷达距离成像60、基于石英传感器的动态称重数据处理算法研究61、基于压缩感知的电压传感器信号处理方法62、基于LMS算法的分布式光纤测温系统中信号处理研究63、数字信号处理对电子测量仪器的影响分析64、控制系统模拟信号处理方法研究65、基于CUDA的宽带GNSS接收机信号处理加速技术366、基于MATLAB小井眼阵列感应测井信号处理滤波器设计67、基于WPD与BPNN的超声信号处理技术68、铁道信号电源接地和混电的分析及处理69、基于窄带频率激励和先进信号处理技术的新型电线杆无损检测系统研究70、汽车防撞雷达中频信号处理系统的优化方案71、L波段宽动态范围信号检测与处理72、基于FPGA声学多普勒流速剖面仪的信号处理机设计信号处理本科毕业论文题目三:73、基于可编程计算架构的诊断超声信号处理系统设计74、电子战侦察系统中的信号侦收质量评估与优选75、基于FPGA的宽带雷达回波信号处理板设计76、加速度传感器信号处理算法77、基于DSP和FPGA的数字信号处理系统设计78、浅谈数字信号处理对电子测量与仪器的影响79、射频微波信号在光纤中传输及处理技术的研究80、滚动轴承振动信号处理方法综述81、光纤分布系统中数字信号处理研究与设计82、一种自发放电源定位系统研究83、高空气象探测接收端中频信号处理技术研究84、轻型侦察车雷达信号处理技术研究及终端软件开发85、一种自适应雷达侦察信号处理方法86、基于FPGA的通用雷达信号处理板卡设计87、具有自适应性的实时睡眠信号处理算法研究88、基于多延迟相关参数的信号处理算法489、基于Matlab的信号处理系统与分析90、高速光通信中的全光数字信号处理技术91、气路静电传感器信号处理电路设计及仿真分析92、开环Sagnac干涉仪的数字信号处理93、基于目标驱动的数字信号处理课程模块化教学改革94、全光波长转换及全光信号处理集成器件的研究95、皮米分辨力激光外差干涉测量中信号处理的关键技术研究96、基于声学信号处理的单缸汽油机声源频谱特征辨识97、一种基于VPX标准的侦测雷达信号处理系统设计方法98、光寻址电位传感器的噪声分析与信号处理方法研究99、高计数率数字化谱仪信号处理技术研究100、旋转机械信号处理技术及其在高速自动平衡中的应用101、金属薄板和动车车轮超声检测中信号处理方法的研究102、基于改进Kalman算法的OCT信号处理方法研究103、转子式陀螺仪信号处理技术研究104、机械加工过程中的早期故障微弱信号处理方法研究105、脉冲多普勒雷达信号处理MATLAB仿真研究106、北斗接收机基带信号处理算法关键技术研究107、基于盲压缩感知的非合作跳频信号处理技术研究108、旋转机械振动信号处理算法研究与程序设计信号处理本科毕业论文题目四:109、镜头式光幕靶可编程前置信号处理电路设计110、扫描式手机屏疵病检测仪信号处理技术研究5111、非相干散射雷达信号处理与分析112、汽车主动防撞毫米波雷达信号处理技术研究113、汽车防撞雷达信号处理研究及系统设计114、光纤电流互感器信号处理方法的研究115、基于图信号处理的滚动轴承故障特征提取方法研究116、基于线性调频波的车载雷达信号处理算法研究117、船用调频连续波雷达信号处理关键算法研究与实现118、基于压缩感知的声矢量阵列信号处理119、可用于大科学装置的数据采集和信号处理系统的研究120、基于盲源分离的P300脑机接口信号处理算法研究121、脑电波信号处理及其在教育中的应用研究122、低频压电加速度传感器的噪声特性及信号处理方法研究123、基于STM32的血氧信号处理系统的设计124、非理想条件下的自适应波束形成算法研究125、多通道动态测试信号处理及控制逻辑设计126、时分多通道透视雷达信号处理与显控系统研究127、卫星导航基带信号处理算法研究与应用128、基于奇异值分解的信号处理关键技术研究129、数字信号处理对分布式光纤传感系统性能提升的研究130、数字信号处理中的前沿技术分析131、下一代相干光通信系统的数字信号处理技术研究132、基于循环平稳分析的LFM信号盲处理结果可靠性评估133、气象卫星广播系统接收机的基带信号处理研究134、基于时间透镜的模拟信号处理的研究135、宽带雷达的声光相关后端信号处理研究136、气体超声波流量计系统数学模型建立与信号处理方法研究6137、远程频谱分析设备数字信号处理电路研究与验证138、伪码调相引信信号处理技术研究139、干涉合成孔径雷达信号处理及相位解缠算法研究140、高灵敏度GPS接收机基带信号处理相关技术的研究与仿真141、外辐射源雷达信号处理与目标跟踪方法研究142、相控阵自跟踪系统信号处理平台硬件设计与实现143、LFMCW汽车防撞雷达信号处理及硬件实现144、偏振复用-相干光通信系统中的数字信号处理算法研究信号处理本科毕业论文题目五:145、基于稀疏分解的水下目标回波信号处理方法146、阵列信号处理中稳健自适应波束形成算法研究147、光纤光栅振动传感器的响应特征与振动信号处理148、盲信号处理与分离技术研究149、天波超视距雷达干扰与杂波信号处理技术研究150、时变信号处理关键技术研究151、基于分布式光纤的电缆温度监测系统信号处理的研究152、基于认知控制的应答器上行链路信号处理方法153、光纤陀螺随机误差辨识及信号处理技术研究154、非法作业监听设备信号处理系统测向算法FPGA设计155、交流电磁场检测仪的信号处理电路设计156、独立分量分析在自动机振动信号处理中的应用157、GPS软件接收机基带信号处理算法及验证158、基于Kintex-7的三维声学成像主信号处理系统硬件设计159、大型锻件超声检测方法及信号处理算法研究7160、数字信号处理研究性教学的独特性分析161、北斗二代导航接收机基带信号处理算法研究162、云计算平台下的语音信号处理163、基于振动信号处理的电机轴承故障诊断方法研究164、爆炸场冲击波信号处理方法及传播特性研究165、基于分布式递归最小二乘算法的网络化稀疏信号处理研究166、锯齿波调频探测系统信号处理研究与实现167、基于DSP和FPGA的信号处理模块及其IP核设计技术研究168、空间目标监视电子篱笆系统信号处理算法研究169、基于多核DSP的某炮位侦校雷达信号处理算法研究及实现170、基于GPU的外辐射源雷达信号处理软件实现171、基于数字信号处理的无源互调干扰对消172、基于DSP的调频连续波激光测距信号处理技术173、多通道相控阵雷达系统设计与信号处理方法研究174、经验小波变换的理论算法研究及其在语音信号处理中的应用175、基于多传感器信息融合的涡街信号处理方法研究176、多模式相控阵雷达系统中的时序控制与信号处理程序设计177、地基警戒雷达杂波抑制信号处理技术研究178、基于PCIe接口的通用信号处理模块设计与实现179、非相干散射雷达信号处理系统外场测试实验与算法改进8。
基于DSP的直流电机控制系统设计本科毕业论文
基于D S P的直流电机控制系统设计摘要:直流电机由于励磁磁场和电枢磁场完全解耦,可以独立控制,因此具备良好的调速性能,出力大、调速范围宽和易于控制,广泛应用于电力拖动系统中;而随着对电机控制要求的不断提高,普通的单片机越来越不能满足对电机控制的要求,DSP技术的发展正好为先进控制理论以及复杂控制算法的实现提供了有力的支持;本设计采用美国TI公司专门为电机数字化控制设计的16位定点DSP 控制器TMS320LF2407作为微控制器;该芯片集DSP信号高速处理能力及适用于电机控制优化的外围电路于一体,可以为高性能传动控制技术提供可靠高效的信号处理与控制硬件;电机的控制系统是由检测装置、主控制器、功率驱动器以及上位机组成,其中DSP控制器是电机控制系统的关键部分,负责对电机的反馈信号进行处理并输出控制信号来控制电机的转动;关键词:直流电机; DSP; PID控制器; PWMThe Design of DC Motor Control System Based on DSP Abstract:The DC motor armature magnetic field and the excitation completely decoupled, it can be independently controlled, so it has a good speed performance, contribute to a large power, widely speed range, and easy to control, so it is widely used in electric drive systems. With the motor control required for continuous improvement, common single MCU can't meet requirements of the motor control well, DSP technology just for the advanced control theory and complex control algorithm implementation provides a strong support.This design uses the American TI company specially for motor control design of digital 16 fixed-point DSP controller TMS320LF2407 as the controller. The chip set DSP signal the high processing capacity and used in motor control optimization the periphery of the circuit in a body, high performance driving control technology to provide reliable and efficient signal processing and control hardware. Motor control system is composed of detection devices, the main controller, power driver and PC componen ts, whichDSP controller is a key part of the motor control system , responsible for the motor feedback signal processing and output control sig n al to control the rotation of the motor.Keywords:DC motor, DSP, PID controller, PWM目录第1章绪论课题概述课题研究的背景电气传动是以电动机的转矩和转速为控制对象,按生产机械工艺要求进行电动机转速控制的自动化系统;根据电动机的不同,工程上通常把电气传动分为直流电气传动和交流电气传动两大类;纵观电气传动的发展过程,交流与直流两大电气传动并存于各个时期的各大工业领域内,虽然它们所处的地位和作用不同,但它们始终随着工业技术而发展的;特别是随着电力电子技术和微电子学的发展,在相互竞争中完善着自身,发生着变更;由于直流电机具有良好的线性调速特性,简单的控制性能,因此在工业场合应用广泛;近代,随着生产技术的发展,对电气传动在起制动、正反转以及调速能力、静态特性和动态响应方面都提出了更高的要求,所以计算机控制电力拖动控制系统已成为计算机应用的一个重要内容;直流调速系统在工农业生产中有着更为广泛的应用;随着计算机技术和电力电子技术的飞速发展,两者的有机结合使电力拖动控制技术产生了新的变化;电力电子技术、计算机技术和直流拖动技术的组合是技术领域的交叉,具有广泛的应用前景;有不少的研究者己经在用DSP作为控制器进行研究;直流调速控制系统的控制方法经历了机械式的、双机组式的、分立元件电路式的、集成电路式的、单片机式的发展过程;随着数字信号处理器DSP的出现,给直流调速控制提供了新的手段和方法;将计算机技术的最新发展成果运用在直流调速系统中,在经典控制的基础之上探讨一种新的控制方法,为计算机技术在电力拖动控制系统中的应用做些研究性的工作;用计算机技术实现直流调速控制系统,计算机的选型很多;经过选择,选取DSP芯片作为控制器;直流调速系统的内容十分丰富,有开环控制系统,有闭环控制系统;有单闭环控制系统,有双闭环控制系统和多闭环控制系统;有可逆调速系统,有不可逆调速系统等9;开展本课题研究的控制对象是闭环直流调速系统;研究的目的是利用计算机硬件和软件发展的最新成果,对控制系统升级进行研究;研究工作是在对控制对象全面回顾总结的基础上,重点对控制部分展开研究,它包括对实现控制所需要的硬件和软件环境的探讨,控制策略和控制算法的探讨等内容;目前,对于控制对象的研究和讨论很多,有比较成熟的理论,但实现控制的方法和手段随着技术的发展,特别是计算机技术的发展,不断地进行技术升级;这个过程经历了从分立元件控制,集成电路控制和单片计算机控制等过程;每一次的技术升级都是控制系统的性能有较大地提高和改进;随着新的控制芯片的出现,给技术升级提供了新的可能;电机控制是DSP应用的主要领域,随着社会的发展以及对电机控制要求的日益提高,DSP将在电机控制领域中发挥越来越重要的作用;课题研究的目的及意义长期以来,直流电机一直占据着速度控制和位置控制的统治地位;由于它具有良好的线性调速特性,简单的控制性能,高质高效的平滑运转的特性,尽管近年来不断受到其它电动机的挑战,但到目前为止,就其性能来说仍无其它电动机可比;在控制系统的构成上,本课题对硬件电路进行了设计,而这个硬件系统具有一定的通用性,也即可以将它作为一个硬件平台,在其它过程控制中应用;另外,由DSP的特点量身订做,可以在其它的控制系统中根据不同的要求进行外围电路的设计,进而来构成硬件系统,这样既便于设计思想的物化,又使得设计系统更加紧凑,不浪费资源;本直流电机控制系统采用经典的数字增量式PID控制算法,在本文中对数字增量式PID控制的理论、设计和实现进行了较为详细的论述; 课题研究的现状近些年来,随着现代电力电子技术、控制技术和计算机技术的发展,电机的应用技术也得到了进一步的发展,新产品、新技术层出不穷;除了人们己经熟悉的普通电机外,许多不同用途的特种电机也不断问世,如广泛应用于办公设备的无刷直流电机和高精度的步进电机、用于照相机的超声波电机、用于心脏血液循环系统的微型电机等等;另一方面,由于应用了电力电子技术,电机的控制技术变得更加灵活,效率也更高,如变频器控制的异步电机及伺服系统即是典型的例子1;在实际中,电机应用已由过去简单的起停控制、提供动力为目的应用,上升到对其速度、位置、转矩等进行精确的控制,使被驱动的机械运动符合预想的要求;例如在工业自动化、办公室自动化和家庭住宅自动化方面使用大量的电机,几乎都采用功率器件进行控制,将预定的控制方案、规划指令转变成期望的机械运动;这种新型控制技术己经不是传统的“电机控制”或“电气传动”而是“运动控制”;运动控制使被控机械实现精确的位置控制、速度控制、加速度控制、转矩或力的控制,以及这些被控机械量的综合控制;因此现代电机控制技术离不开功率器件和电机控制器的发展5;电机的控制器经历了从模拟控制器到数字控制器的发展;由于模拟器件的一些参数受外界因素影响较大,并且它的精度也差;所有这些都使得模拟控制器的可重复性比较差,控制效果不理想,因此调速电机的控制器逐渐朝数字化方向发展;数字控制器与模拟控制器相比较,具有可靠性高、参数调整方便、更改控制策略灵活、控制精度高、对环境因素不敏感等优点;随着现有的工业电气传动、自动控制和家电领域对电机控制产品需求的增加用户也不断提高对电机控制技术的要求5;总是希望能在驱动系统中集成更多的功能,达到更高的性能;许多设备试图使用8位或是准16位的微处理器实现电机的闭环控制,然而它们的内部体系结构和计算功能都阻碍了这一要求的实现;例如,在很多领域如工业、家电和汽车,用户希望使用效率高且去掉霍尔效应传感器的电机;这种电机的控制可以通过使用先进的电机控制理论、采用高效的控制算法来实现;但是这可能超出上述微处理器的计算能力;使用高性能的数字信号处理器DSP来解决电机控制器不断增加的计算量和速度需求是目前较为普遍的做法;将一系列外围设备如模数转换器A/D、脉宽调制发生器PWM和数字信号处理器DSP集成在一起,就获得一个既功能强大又非常经济的电机控制专用的DSP芯片;近年来,各种集成化的一单片DSP的性能得到很大的改善,软件和开发工具越来越多,越来越好,价格却大幅度降低;低端产品的价格已接近单片机的价格水平,但却比单片机具有更高的性能价格比;越来越多的单片机用户开始选用DSP器件来提高产品性能,DSP器件取代高档单片机的时机己成熟13;首先,与单片机相比,DSP器件具有较高的集成度;DSP具有更快的CPU,更大容量的存储器,内置有波特率发生器和FIFO缓冲器,提供高速、同步串口和标准异步串口;有的片内集成了A/D和采样/保持电路,可提供PWM输出;更为不同的是,DSP器件为精简指令器件,大多数指令都能在一个周期内完成,并且通过并行处理技术,使一个指令周期内可完成多条指令;同时DSP采用改进的哈佛结构,具有独立的程序和数据空间,允许同时存取程序和数据;又配有内置高速硬件乘法器、多级流水线,使DSP 器件具有高速的数据计算能力;而单片机为复杂指令系统计算机CISC,多数指令要2-3个指令周期来完成;单片机采用冯.诺依曼结构,程序和数据在同一空间存取,同一时刻只能单独访问指令和数据、ALU只能做加法,乘法需要由软件来实现,因此占用较多的指令周期,也就是说速度比较慢;所以,结构上的差异使DSP器件比准16位单片机单指令执行时间快8-10倍,完成一次乘法运算快16-30倍;DSP器件还提供了高度专业化的指令集,提供了FFT快速傅立叶变换和滤波器的运算;此外,DSP器件提供了JTAG Joint Test Action Group接口,具有更先进的开发手段,批量生产测试更方便;其次,基于DSP芯片制造的电机控制器可以降低对传感器等外围器件的要求;通过复杂的算法达到同样的控制性能,降低成本,可靠性高,有利于专利技术的保密;现在各大DSP生产厂家都推出自己的内嵌式DSP电机控制专用集成电路;如占DSP市场份额45%的美国德州仪器公司,凭借自己的实力,推出了电机控制器专用DSP--TMS320C24x;新的TMS320C24x DSP采用TI公司TMS320C2xLP16位定点DSP核,并集成了一个电机事件管理器,后者的特点是可以最佳方式实现对电机的控制;该器件利用TI的可重用DSP核心技术,显示出TI的特殊能力一通过在单一芯片上集成一个DSP和混合信号外设件,制造出面向各种应用的DSP方案;TMS320C24x作为第一个数字电机控制器的专用DSP系列,可支持用于电机控制的指令产生、控制算法处理、数据交流和系统监控等功能;集成的DSP核、最佳化电机控制器事件管理器和单片式A/D设计等诸多功能块加在一起,就可以提供一个单芯片式数字电机控制方案;系列中的TMS320LF2407包括一个30MIPSDSP核、两个事件管理器、32位的中央算术逻辑单元、多达16通道的IO位A/D转换器、64K的I/0空间和一个32K字的闪速存储器,它利用TMS320的定点DSP软件开发工具和JTAG仿真支持,可使电机控制领域的研发人员方便地调试控制器和脱机使用;第三,DSP运算速度快,控制策略中可以使用先进的实时算法,如自适应控制、卡尔曼滤波、状态预估等,大大提高控制系统的品质;而且DSP 控制软件可用C语言或汇编语言编写或者二者嵌套使用;因此采用DSP 芯片制造的电机控制器便于用户的调试和应用;最后,在越来越多的场合,如电动汽车、纺织行业、水泵变频调速系统等,他们往往是规模比较大,时序、组合逻辑都很复杂的情况,这时如果同时运用DSP芯片和一些其它的可编程逻辑器件可以大大减小系统的体积、提高系统运算能力,实现复杂的实时控制;课题研究的内容本文主要研究基于DSP的直流电机控制系统,通过控制算法和调速方法的分析,利用电机调速、DSP芯片控制、上位机通信、按键模块等的基本原理及相关知识,实现对电机的速度控制;整个系统的基本思想就是利用DSP内部资源产生可控制的脉冲控制整流电压,改变串入主回路中的直流电动机的电磁转矩,实现电动机的转速调节;研究内容包括如下:1电机控制系统功能实现的分析;2控制算法与调速方法的分析与设计;3电机驱动、电源模块、按键模块、测速、显示模块的硬件设计与实现;4系统主程序、按键扫描、控制算法、测速、电机速度控制等程序的分析、设计与实现;5电机控制系统整机测试与实现;第2章系统总体设计系统的组成由图2-1可知,该设计包含DSP控制单元、功率驱动单元、检测单元、显示单元、通信单元五个部分;DSP控制单元:对来自上位机的给定信号和来自传感器的反馈信号按一定的算法进行处理,输出相应的PWM波,经过光电隔离部分,送给功率驱动单元;功率驱动单元:对来自DSP控制器的PWM信号进行功率放大后送给直流电动机的电枢两端,驱动电机与负载;速度检测单元:采集电机的速度信息,并送给主控制器;显示单元:将采集到的电机转速信息予以显示;通信单元:负责主控制器与上位机及外设的信息交换;图2-1 系统总体框图2. 2 DSP芯片选择直流电机的调速控制系统一般采用电机专用微处理器,其种类主要包括复杂指令集CISC处理器如工NTEL196MX系列单片微控制器,精简指令集RISC如日立公司SH704x系列单片微控制器,哈佛结构DSP处理器如TI公司T145320F24X系列DSP;一般用于直流电机控制的徽处理器性能要满足以下几个方面:1指令执行速度;2片上程序存储器、数据存储器的容量及程序存储器的类型;3乘除法、积和运算和坐标变换、向量计算等控制计算功能;4中断功能和中断通道的数目;5用于PWM生成硬件单元和可实现的调制范围以及死区调节单元;6用于输入模拟信号的A/D转换器;7价格及开发环境;DSP一般采用哈佛或者改进的哈佛结构,程序空间和数据空间分离,程序的数据总线和地址总线分离,数据的数据总线和地址总线分离;这种结构允许同时访问程序指令和数据,在同一机器周期里完成读和写,并行支持在单机器时钟内同时执行算术、逻辑和位处理操作,极大地提高了执行速度,并且电机控制专用DSP具备丰富的设备和接口资源;TI公司的TMS320系列DSP芯片是目前最有影响、最为成功的数字信号处理器,其产品销量一直处于国际领先地位,是公认的世界DSP霸主;本论文选择了TI公司的TMS320LF2407DSP作为直流电机控制系统的微处理器;TMS320LF2407 DSP 控制器介绍TMS320LF2407 DSP是专为数字电机控制和其它控制系统而设计的;是当前集成度最高、性能最强的运动控制芯片;不但有高性能的C2XX CPU 内核,配置有高速数字信号处理的结构,且有控制电机的外设;它将数字信号处理的高速运算功能,与面向电机的强大控制功能结合在一起,成为传统的多微处理器单元和多片系统的理想替代品12;TMS320LF2407的片内外设模块包括:事件管理模块EV、数字输入/输出模块I/O、模数转换模块ADC、串行外设模块SPI、串行通信模块SCI、局域网控制器模块CAN;1事件管理器EVA和EVBTMS320LF2407提供两个事件管理器EVA和EVB模块,每个模块包含两个通用GP定时器、3个全比较/PWM单元、3个捕获单元和一个正交编码脉冲电路;事件管理器位用户提供了众多的功能和特点,在运动控制和电机控制中特别有用;通用定时器:LF2407共有4个通用定时器,每个定时器包括:一个16位的定时器增/减计数的计数器TxCNT;一个16位的定时器比较寄存器TxCMPR;一个16位的定时器周期寄存器TxPR;一个16位的定时器控制寄存器TxCON;可选择的内部或外部输入时钟;各个GP定时器之间可以彼此独立工作或相互同步工作;与其有关的比较寄存器可用作比较功能或PWM波形发生;每个GP定时器的内部或外部的输入时钟都可进行可编程的预定标,它还向事件管理器的子模块提供时毕;每个通用定时器有4种可选择的操作模式:停止/保持模式、连续增计数模式、定向增/减计数模式、逢续增/减计数模式;当计数器值和比较寄存器值相等时,比较匹配发生,从而在定时器的PWM输出引脚TxPWM/TxCMP上产生CMP/PWM 脉冲,可设置控制寄存器GPTCON中的相应位,选择下溢、比较匹配或周期匹配时自动启动片内A/D转换器;比较单元:LF2407有6个比较单元,每个EV模块有3个;每个比较单元又有两个相关的PWM输出,比较单元的时基由通用定时器1 EVA模块和通用定时器3 EVB模块提供;每个比较单元和通用定时器1或通用定时器3,死区单元及输出逻辑可在两个特定的器件引脚上产生一对具有可编程死区以及输出极性可控的PWM输出;在每个EV模块中有6个这种与比较单元相关的PWM输出引脚,这6个特定的PWM输出引脚可用于控制三相交流感应电机和直流无刷电机;由比较方式控制寄存器所控制的多种输出方式能轻易地控制应用广泛的开关磁阻电机和同步磁阻电机;捕获单元:捕获单元被用于高速I/O的自动管理器,它监视输入引脚上信号的变化,记录输入事件发生时的计数器值,即记录下所发生事件的时刻;该部件的工作由内部定时器同步,不用CPU干预;LF2407共有6个捕获单元,CAP1,CAP2,CAP3可选择通用定时器1或2作为它们的时基,但CAP1和CAP2一定要选择相同的定时器作为它们的时基;CAP4,CAP5,CAP6可选择通用定时器3或4作为它们的时基,同样CAP4和CAP5也一定要选择相同的定时器作为它们的时基;每个单元各有一个两级的FIFO缓冲堆栈;当捕获发生时,相应的中断标志被置位,并向CPU发中断请求;若中断标志己被置位,捕获单元还将启动片内A/D转换器;正交编码脉冲QEP单元:常用的位置反馈检测元件为光电编码器或光栅尺,它直接将电机角度和位移的模拟信号转换为数字信号,其输出一般有相位差为90°的A、B两路信号和同步脉冲信号C;A、B两路脉冲可直接作为LF2407的CAP1/QEP1和CAP2/QEP2引脚的输入;正交编码脉冲电路的时基由通用定时器2或通用定时器4提供,但通用定时器必须设置成定向增/减计数模式,并以正交编码脉冲电路作为时钟源;2数字输入/输出模块I/ODSP器件的数子输入/输出引脚均为功能复用引脚;即这些引脚既可作为通用I/O功能双向数据输入/输出引脚,也可作特殊功能PWM输出、捕获输入、串行输入输出等引脚;数子I/O模块负责对这些引脚进行控制和设置;两种功能的选择由I/O复用控制寄存器MCRx,x=A,B,C来控制;当引脚作为通用I/O时,由数据和方向控制寄存器PxDATDIR,x=A,B,C,D,E,F指出各I/O引脚的数据方向输入还是输出和当前引脚对应的电平高或低;读通用I/O引脚的电平或向引脚输出电平,实际上是对相应的寄存器PxDATDIR进行读写操作;3模数转换器ADC模块在自动控制系统中,被控制或被检测的对象,如温度、压力、流量、速度等都是连续变化的物理量,通过适当的传感器如温度传感器、压力传感器、光电传感器等将他们转换为连续变化的电压或电流即模拟量;模数转换器ADC就是用来讲这些模拟电压或电流转换成计算机能够识别的数字量的模块;TMS320LF2407期间内部有一个10为的模数转换器ADC;该模块能够对16个模拟输入信号进行采样/保持和A/D转换,通道的转换顺序可以编程选择;4串行通信接口SCI模块2407器件的串行通信接口SCI模块是一个标准的通信异步接收/发送UART可编程串行通信接口;SCI支持CPU与其他异步串口采用标准不返回零NRZ模块进行异步串行数字通信;SCI有空闲线和地址位两种多处理器通信方式;两个输入/输出引脚:SCIRXDSCI接收数据引脚和SCITXDSCI发送数据引脚;SCI通过一个16位的波特率选择寄存器,可编程选择64K种不同速率的波特率;SCI支持半双工和全双工操作,发送器和接收器的操作可以通过中断或转换状态标志来完成;5串行外设接口SPI模块串行外设接口SPI模块是一个高速同步串行输入/输出I/O口,它能使可编程长度1—16位的串行位流以可编程的位传输速率输入或输出器件;SPI可作为一种串行总线标准,以同步方式实现两个设备之间的信息交换,即两个设备在同一时钟下工作;SPI通常用于DSP控制器与外部设备或其他控制器之间的通信,用SPI可以构成多机通信系统,SPI还可以作为移位寄存器、显示驱动器和模数转换器ADC等器件的外设扩展口;6CAN控制器模块LF24xx系列DSP控制器作为第一个具有片上CAN控制模块的DSP芯片,给用户提供一个设计分布式或网络化运动控制系统的无限可能;CAN总线是一种多主总线,通信介质可以是绞线、同轴电缆或光导纤维,通信速率可达1 Mbps,通信距离可达10km;CAN协议的一个最大特点是废除了传统的站地址编码,而代之以对通信数据块进行编码,使网络内的节点个数在理论上不受限制;由于CAN 总线具有较强的纠错能力,支持差分收发,因而适合高干扰环境,并具有较远的传输距离;2407的CAN控制器模块是一个16位的外设模块,支持CAN2. 0B协议;CAN模块有6个邮箱MBOX0—MBOX5;有用于0,1,2和3号的邮箱的本地屏蔽寄存器和15个控制/状态寄存器;CAN模块既有可编程的位速率、中断方式和CAN总线唤醒功能;自动回复远程请求;自动再发送功能在发送时出错或仲裁是丢失数据的情况下;总线出错诊断和自测模式; 硬件方案论证测速传感器的选择方案一:使用测速发电机,输出电动势E和转速n成线性关系,即E=kn,其中k是常数;改变旋转方向时,输出电动势的极性即相应改变;方案二:采用霍尔传感器,霍尔元件是磁敏元件,在被测的旋转体上装一磁体,旋转时,每当磁体经过霍尔元件,霍尔元件就发出一个信号,经放大整形得到脉冲信号,送运算;方案三:在电机的转轴上套一码盘,利用光电对管测脉冲,每转一圈OUT端输出若干个脉冲;本设计中码盘每转一圈,输出4个脉冲经比较,方案一中的测速放电机安装不如方案二中霍尔元件安装方便,并且准确率也没方案二的高,并且方案二不需A/D转换,直接可以被DSP接收;但方案二的霍尔传感器的采购不是很方便,故采用方案三,它具有方案二的几乎所有的优点;方案三中可以采用定时的方法:是通过定时器记录脉冲的周期T,这样每分钟的转速:M=60/4T=15/T;0也可以采用。
基于DSP的数字逆变电源的设计(毕业设计)
本科毕业设计说明书基于TMS320LF2407A的数字逆变电源的设计THE DESIGN OF DIGITAL INVERTER BASED ONTMS320LF2407A学院(部):电气与信息工程学院专业班级:学生姓名:指导教师:2013年06 月01 日基于TMS320LF2407A的数字逆变电源的设计摘要逆变电源是一种采用电力电子技术是进行电能变换的装置,它从交流或直流输入获得稳压恒频的交流输出。
逆变电源技术是一门综合性的产业技术,它横跨电力、电子、微处理器及自动控制等多学科领域,是目前电力电子产业和科研的热点之一。
逆变电源广泛应用于航空、航海、电力、铁路交通、邮电通信等诸多领域。
电源技术的发展使得数字控制系统控制的电源取代传统电源已成为必然。
逆变电源的发展是和电力电子器件的发展联系在一起的,器件的发展带动着逆变电源的发展。
目前逆变电源的核心部分就是逆变器和其控制部分,虽然在控制方法上已经趋于成熟,但是其控制方法实现起来还是有所困难。
因此,对逆变电源的控制和逆变器进行深入研究具有很大的现实意义。
随着现代科学技术的迅猛发展,逆变技术目前已朝着全数字化、智能化、网络化的方向发展。
而作为专用的DSP的出现,更是为研究和设计新型的逆变电源提供了更方便、更灵活、功能更强大的技术平台。
本文采用美国德州仪器公司(TI)新近推出的一种TMS320LF2407A数字信号处理器,作为逆变电源中的核心控制部分进行研究。
以实现所研制的逆变装置能输出标准的正弦交流电。
本文主要分析了变频电源技术现状、发展趋势和存在的难点,指出论文的研究内容和意义。
详细讨论了逆变器的SPWM调制法工作原理,介绍了数字实现时对称规则采样法和不对称规则采样法的特点。
通过分析SPWM波形产生规律和特点,选择了以不对称规则采样法为基础实现的单极性SPWM控制,并且具体介绍了DSP实现SPWM。
文中设计出了整个逆变电源的硬件结构,其主要核心部分是IPM和DSP控制部分。
基于0.02级安装式标准电能表的设计与应用
基于0.02级安装式标准电能表的设计与应用作者:李野朱逸群于学均滕永兴来源:《电子技术与软件工程》2016年第02期摘要基于目前电能表发展的状况,提出了高精度、小体积、低功耗标准表的理念,采用精密电阻和精密电流互感器进行采样,应用外部精密基准电压源ADR421搭配16位6通道A/D进行同步模数转换,数字处理部分采用高性能、超低功耗DSP,具有高精度、低漂移、低噪声等特性。
产品运算准确并且能够实时测量,最后给出了主要的应用。
【关键词】高精度精密电阻模数转换数字处理随着市场经济的发展和电力体制的改革,形成了电能计量装置集中检验、统一配送的新型管理模式,对电能计量装置的检定速度提出了更高的要求。
由于传统的电能表标准装置在检定电能表过程中存在着大量重复、机械性的工作,劳动强度高,效率受到制约。
而目前一种电能表检定自动化流水线标准装置,则改变了大量重复、机械性的工作模式,全面提高检定/检测工作效率和质量,降低劳动强度,实现了电气连接的可靠性和安全性。
将逐步取代传统的电能表标准装置成为市场的主流。
面对电能表检定自动化流水线标准装置,定期对装置依据JJG597-2005检定规程进行检定和考核也是一项极具挑战性的工作。
本文研究一种0.02级安装式标准电能表实现对单、三相流水线标准表自动化流水线以及电能表试验装置进行的校准和实现。
1 整体设计方案采样以最先进的DSP数字技术为设计原理,通过“交流数字采集,计算机数字处理”实现了电能的实时测量,电压、电流输出分别经电阻分压取样和电流互感器取样变成小信号后,由16位A/D进行同步模数数据转换,送至DSP处理,DSP做实时U、I运算,求出实际功率值P,由P控制频率发生器产生比例于P的高频脉冲输出,该脉冲为电能高脉冲,由分频器分频得电能低脉冲,高、低频电能脉冲输出到接口。
测量P的同时,DSP还完成电压、电流真有效值相位、频率等的测量,测量值由ARM芯片处理,实现液晶显示和按键设置功能。
信号与系统实验系统
目录信号与系统实验系统 (2)高频电子电路实验系统 (4)通信原理实验系统 (6)数字通信实验系统 (9)光纤通信实验系统 (11)光纤通信配套设备及报价 (19)数字程控交换实验系统 (23)移动通信实验系统 (27)微波电路与系统实验系统 (33)通信工程综合实验实训装置 (36)通信系统设计创新实验台 (42)EDA可编程器件实验系统 (48)SOPC片上可编程实验开发系统 (55)DSP数字信号处理实验开发系统 (61)ARM嵌入式实验开发系统 (71)DSP+ARM实验开发系统 (79)现代电子技术综合实验开发系统:DSP+ARM+SOPC (82)“实验室建设”定制服务简介 (86)百科融创-技术培训 (88)百科融创-创新教学实验仪器报价单 (89)信号与系统实验系统一、适用范围信号与系统实验箱主要针对《信号与系统》课程而配套设计的实验装置。
系统集实验模块和实验所需信号源等于一体,结构紧凑,性能稳定,是各高校实验室建设的理想产品。
二、系统组成1、功能模块A)信号发生器模块:可产生频率、幅度、占空比可调的三角波、方波、正弦波。
B)单片机低频信号发生器模块:产生常用信号,可以包括:指数信号,衰减指数信号,正弦信号,抽样函数信号,高斯函数信号,单位斜变信号(锯齿波),单位阶跃信号(方波),冲击信号等多种信号,通过键盘或按键输入选择波形种类,用LED显示。
C)扫频信号源模块:产生频率周期性连续变化的正弦信号。
2、实验模块A)有源无源滤波器模块:主要实现低通、高通、带通、带阻滤波器,电路板用图形表示,便于学生理解。
B)基本运算单元模块:包括加法器,标量乘法器(同向、反向),积分器。
C)一阶电路,二阶电路(串并联RLC电路),线性时不变系统模块:可提供固定连接电路,或者由用扩展模块中分立元件连接实现。
D)二阶网络状态变量测量模块:可以模拟求解系统响应,实现微分方程的模拟求解。
参数和初始值可以由实验者设置,以满足不同实验要求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
6 4 0 × 4 8 0 液晶屏模块l /A 与 档位切换模块
块化通道板 、信号采集板 、测量计算板 、核心控制 器 板 ,并且采 用先 进 的大 型集成 电路 。 因此 ,此标
准表具 有许 多优点 :系统 结构 简单 ,运行 可靠 ,良 好 的人 机交互 界 面 ,重量 轻 ,体 积小 ,可 以长期 应 用于工 作领域 以及 实验室 。
Ab s t r a c t :Ba s e d o n t h e a n a l y s i s o f t h e p r e v i o u s s t a n d a r d me t e r s ,t h i s p a pe r pr o p o s e s t h e d e s i g n p l a n o f h i g h p r e c i s i o n AC / D C
p r e c i s i o n mu h i f u n c t i o n s an t d a r d m e t e r ,a n d i n t r o d u c e s t h e d e s i g n p mj e c t o f 0 . 0 2 c l a s s A C/D C m u h i f u n e t i o n s t a n d m x t m e t e s r
0 . 0 2级 交 直 流 多 功 能标 准 表 原 理 模块 框 图 如
图 1所示 。
8 . 4 寸V G A l 精密 交流 电压
解 决这 些 问题 。
本 文设计 的标 准表 应 用 了 D S P和 A R M 等测 量 技 术 ,并使 用 了 D S P作 为 其 核 心 处 理 器 ,测 量 误 差为 0 . 0 2级 以 内。采 用模 块 化 结 构 设 计 ,包 括模
YI N Hu i .0U C h a o — l o n g .XI ONG Y i n g
( H u n a n E l e c t r i c P o w e r C o r p o r a t i o n R e s e a r c h I n s t i t u t e , C h a n g s h a 4 1 0 0 0 7 , C h i n a )
基于 D S P和 AR M 的0 . 0 2级 交 直 流 多功 能 标 准表 的设 计
银晖 ,欧朝 龙 ,熊鹰 ( 湖 南省 电力公 司科 学研 究院 ,湖 南 长 沙 4 1 0 0 0 7 )
摘
要 :本 文通过 对 以往 标准表 产 品的分析 ,提 出高精 度 交直流 单 、三相 多功能标 准表
的设 计 方案 。探 讨 高精 度 多功 能标准表 的 交流采样 电路 、直 流采样 电路设 计 的方法 .介
绍基于 D S P和 A R M的 0 . 0 2级 交直 流 多功 能标 准 表 的设 计 方 案 。并探 讨 有 关标 准表 关
键 部件设 计 的 问题
关键 词 :交直流单 、三相 标准表 ;模 块化 结构 ;D S P;A R M;标 准表
湖
第3 3卷 第 1 期
d o i : 1 0 . 3 9 6 9 / j . i s s n . 1 0 0 8 — 0 1 9 8 . 2 0 1 3 . 0 1 . 0 0 6
南
电
力
2 0 l 3年 2 月
H U N A N E L E C T R I C P 0 WE R
s i n g l e/t h r e e p h a s e mu h i f u n c t i o n s an t d a r d me t e r .I t d i s c u s s e s t h e c i r c u i t d e s i g n o f AC s a mp l i n g DC s a mp l i n g o f t h e h i g h
随着 电力行业 不断 的深入 改革 ,工业 j相 高精 度多 功能标 准表 的需求迅 速增 加 。而 目前 国 内市场 上 多功 能标 准表 的品种有 限 、价 格 昂贵 、功能不 完 善 ,多是 针 对 部 分 应 用 领 域 设 计 的 ,不 能 普 遍 使
1 整 机 设 计原 理
1 . 1 工作原 理
中图分 类号 :T V 7 3 4 . 4 文献标 识码 :B 文章编号 :1 0 0 8 . 0 1 9 8 ( 2 0 1 3 ) 0 1 . 0 0 1 8 . 0 4
De s i g n o f 0 . 0 2- c l a s s AC / DC mu l t i f un c t i o n s t a n da r d me t e r s b a s e d o n t he DSP a n d ARM
b a s e d o n t h e D S P a n d ARM ,a n d d i s c u s s e s t h e d e s i g n o f t h e k e y p a r t s o f t h e s t a n d a r d me t e r . Ke y wo r d s : AC / DC s i n g l e/ t h r e e p h a s e s t a n d a r d me t e r ;mo d u l a r s t r u c t u r e;DS P;ARM ;s t a n d a r d me t e r