基于遗传算法的PID参数寻优
遗传算法入门实例:对 PID 参数寻优
遗传算法入门实例:对PID参数寻优[原创][这乌龟飙得好快啊]开始之前:假设你已经:能运用C语言,初步了解PID、遗传算法的原理。
遗传算法能干什么?(我有个毛病:每当遇到一个东东,我首先会设法知道:这个东东能干什么呢?)遗传算法可以解决非线性、难以用数学描述的复杂问题。
也许这样的陈述让你觉得很抽象,把它换成白话说就是:有个问题我不知道甚至不可能用数学的方法去推导、解算,那么也许我就可以用遗传算法来解决。
遗传算法的优点是:你不需要知道怎么去解决一个问题; 你需要知道的仅仅是,用怎么的方式对可行解进行编码,使得它能能被遗传算法机制所利用。
如果你运用过PID来控制某个系统,那你一定非常清楚:PID麻烦就在那三个参量的调整上,很多介绍PID的书上常搬一些已知数学模型的系统来做实例环节,但事实上我们面对的往往是不可能用数学模型描述的系统,这个时候该怎么取PID的参值呢?1、可以依靠经验凑试,耗时耗精力。
2、离线规划,这就是下文要做的事情3、在线规划,比方说神经网络PID(后续文章将推出,做个广告先^_^)。
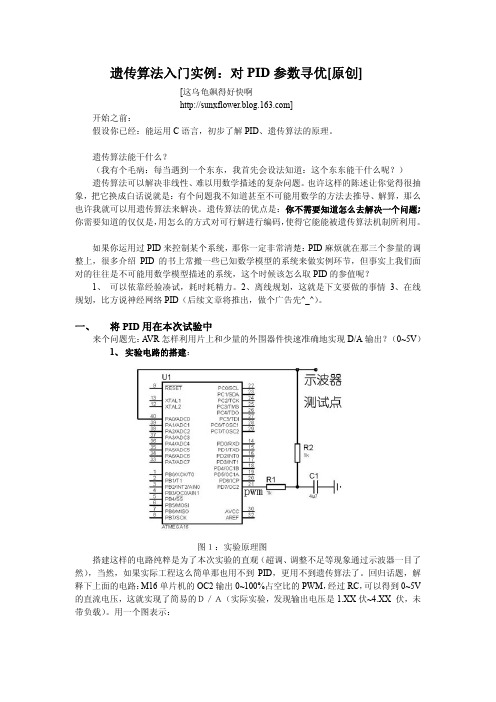
一、 将PID用在本次试验中来个问题先:A VR怎样利用片上和少量的外围器件快速准确地实现D/A输出?(0~5V)1、实验电路的搭建:图1:实验原理图搭建这样的电路纯粹是为了本次实验的直观(超调、调整不足等现象通过示波器一目了然),当然,如果实际工程这么简单那也用不到PID,更用不到遗传算法了。
回归话题,解释下上面的电路:M16单片机的OC2输出0~100%占空比的PWM,经过RC,可以得到0~5V 的直流电压,这就实现了简易的D/A(实际实验,发现输出电压是1.XX伏~4.XX 伏,未带负载)。
用一个图表示:这个时候如果我要输出 3.5V (可以是其它值)电压,该加怎样的PWM呢?(有个简单的方法:标定,但是这种方法系统调整响应速度较为缓慢,理由见图5下附言)也许我们可以把这个输出电压加到A/D反馈到系统,这样就形成了闭环控制:系统输出PWM ——>> PWM 转换成电压——>>A/D 采集,获得实际值与目标值的偏差(例如3.5V )——>>将偏差进行PID 加载到PWM 输出(然后输出又影响下一次的输入……)把示波器加到测试点上,调整扫描周期,使示波器能看到完整的一个调整过程。
基于遗传算法的PID参数整定与优化

福建电脑2014年第2期课题来源:徐州工程学院“江苏省大学生创新创业训练计划项目(创新类)”,编号XCX13095,名称基于遗传算法的PID 参数整定。
0.引言PID 控制是最早发展起来的控制策略之一,由于其算法简单、鲁棒性好和可靠性高,被广泛应用于过程控制和运动控制中,尤其适用于可建立精确数学模型的确定性控制系统中。
在PID 控制中,控制效果的好坏完全取决与PID 参数的整定与优化。
目前,PID 参数整定与优化方法有很多,如Z-N 法、继电型自整定法、最优设计法及梯度法、单纯形法。
前几种整定方法带有经验性并且不是最优解,梯度法和单纯形法极易陷入局部最优点。
因此可采用遗传算法进行参数寻优,该方法是一种不需要任何初始信息并可以寻求全局最优解的高效优化组合方法。
1.遗传算法遗传算法,是由美国的J.H.Holland 提出的一种模仿生物进化过程的最优化方法。
是以自然选择与遗传理论为基础,将生物进化过程中适者生存与群体内部染色体的随机信息交换机制相结合的全局搜索算法。
近年来,人们把它应用于学习、优化、自适应等问题中。
在优化问题中,遗传算法过程简述如下。
首先在解空间中取一群点(基因群),作为遗传开始的第一代。
每个点(基因)用一个二进制的数字串表示,其优劣程度用一个适应度函数来衡量。
适应度函数值小,表明那个点(基因)好,容易在遗传中生存下去。
在向下一代遗传演变中,前一代中的每个数字串根据由其适应度函数值决定的概率被复制到配对池中。
好的数字串以高的概率被复制下来,劣的数字串被淘汰掉。
然后将配对池中的数字串任意配对,并对每一对数字串进行交叉操作,产生新的子孙(数字串)。
最后对新的数字串的某一位进行变异。
这样就产生了新的一代。
按照同样的方法,经过数代的遗传演变后,在最后一代中得到全局最优解或近似最优解。
同常规优化算法相比,遗传算法有以下特点:1)遗传算法是对参数的编码进行操作,而非对参数本身。
遗传算法首先基于一个有限的字母表,把最优化问题的自然参数集编码为有限长度的字符串。
基于遗传算法的PID参数优化

PID控制的参数整定方法的研究历史悠久,早在1942年,Ziegler和Nichols就针对一阶惯性加纯延迟的对象提出了PID控制器参数整定的Z-N法,曲线拟合的方法将阶跃相应数据拟合为近似的一阶惯性加纯滞后环节的模型,从而来解决常规的控制对象。这种方法和理论很快就应用在了实际的生产中。同一年,Ziegler提出了参数整定的临界振荡法,随着后来理论基础的发展,越来越多的参数整定方法开始出现。1993年,陈福祥等提出了增益优化的PID参数整定方法,根据测量得到的阶跃响应的瞬时值去计算PID控制器的参数值。1995年,UdoKuhn提出基于总和时间常数的整定方法,该方法对阶跃响应曲线为S型的自衡对象适用。
其中: 表示系统的输入, 指系统的输出, 是系统输入与输出的差, 误差变化率。模糊自适应参数整定就是研究PID三个参数与 、 之间关系,该系统在运行的过程中不断检测 和 ,PID的三个参数将会被修改,以满足不同 和 对控制参数的不同要求,进而使被控对象性能发挥到极致。
3.临界比例度法
临界比例度法是现在应用较为广泛的一种控制器参数整定法,其实质是首先让控制器在纯比例作用下,通过实验,寻找到等幅振荡的过渡的过程,记录该情况下的比例度 以及等幅振荡周期 ,再有简单计算得到 和 ,步骤如下:
1
PID控制器在工业过程中广泛应用,但是传统的PID控制器稳定性差,适应能力弱等不足,很难满足生产过程中控制的多变性与稳定性。PID参数优化将变得尤为重要,其优化方法主要有:常规Z-N法、基于模糊控制的PID参数整定、衰减曲线法等。
1. 常规Z-N整定方法
常规Z-N整定方法是由Ziegler和Nichols在1942年提出的[],该方法基于受控过程的开环动态响应中一些特征参数而进行的PID参数整定,经验公式基于带有延迟的一阶惯性模型而提出来的,对象模型如下:
基于遗传算法的PID控制器参数优化

基于遗传算法的PID控制器参数优化基于遗传算法的PID控制器参数优化是一种智能化调节方法,通过遗传算法的优化过程,可以自动得到最佳的PID参数组合,并实现对控制系统的自动调节。
以下将详细介绍基于遗传算法的PID控制器参数优化的原理、步骤和应用情况。
一、基于遗传算法的PID控制器参数优化原理遗传算法是一种模拟自然选择和遗传的数学模型,通过模拟生物进化的过程,利用优胜劣汰的原则逐步优化求解问题。
在PID控制器参数优化中,可以将PID参数看作个体(染色体),通过遗传算法的选择、交叉和变异等操作,不断优化个体的适应度,最终得到最佳的PID参数组合。
二、基于遗传算法的PID控制器参数优化步骤(1)初始化种群:随机生成一组PID参数作为初始种群,设置种群大小和迭代次数。
(2)适应度函数定义:根据所需控制效果,定义适应度函数来评估每个个体的优劣程度。
(3)选择操作:根据适应度函数的值选择优秀的个体,采用轮盘赌等选择策略,将优秀的个体复制并加入下一代种群中。
(4)交叉操作:从选择的个体中,选取两个个体进行交叉操作,通过交叉操作生成新的个体,并加入下一代种群中。
(5)变异操作:对下一代种群中的一些个体进行变异操作,改变其染色体的一些位,以保持种群的多样性。
(6)重复上述步骤:迭代执行选择、交叉和变异操作,直到达到预定的迭代次数或找到满意的PID参数组合。
(7)输出最佳解:最终输出具有最佳适应度的PID参数组合,作为优化后的参数。
三、基于遗传算法的PID控制器参数优化应用情况(1)机械控制系统:如电机驱动、自动化装配线等,通过优化PID 参数可以提高系统的控制精度和动态性能。
(2)能源系统:如电力系统、风力发电等,通过优化PID参数可以实现能源的高效利用和稳定运行。
(3)化工过程控制:如温度控制、压力控制等,通过优化PID参数可以提高产品质量和生产效率。
(4)交通管理系统:如城市交通信号控制、车辆行驶控制等,通过优化PID参数可以实现交通流畅和事故减少。
电机控制系统PID参数的遗传算法优化

电机控制系统PID 参数的遗传算法优化肖 龙 汤恩生(北京空间机电研究所,北京 100076)摘 要 近年来,遗传算法的研究十分引人注目,作为一种新型的、模拟生物进化过程的随机化搜索和优化方法。
其算法简单通用,鲁棒性强,在组合优化、机器学习、自适应控制和规划设计等领域的应用中已展现了其特色和魅力。
该方法是一种不需要任何初始信息并可以寻求全局最优解的、高效的优化组合方法。
文章就是利用遗传算法对某一电机控制系统的PID 参数进行优化,以提高控制系统的性能指标。
关键词 PID 控制 PID 参数 遗传算法收稿日期:2006-04-17The Optimizition of Genetic Algorithms for the PID Parameters of MotorController SystemXiao Long Tang Ensheng(Beijing Institute of Space M echanics &Electrici ty,Beijing 100076)Abstract In recent years,the research of genetic algorithms is very popular As a ne w random search and optimized method of simulating nature e volution,genetic algorithms is easy ,currency and robust It has shown its charm in the ap plication of optimize combinition,machine learning,self-adaption control ,programming design and so on This method can search the best and efficient optimized combinition in the globe without any initial information This paper optimizes the PI D controller para meters of a motor by using genetic algorithms to improve the performance of the systemKey Words PID control PID parameter Genetic algorithms1 前言在自动控制系统中,控制器的设计与参数调整是控制理论的重要内容,也是实际工业控制工程的关键技术之一。
基于遗传算法的PID整定
PID控制是工业过程控制中应用最广的策略之一,因此PID控制器参数的优化成为人们关注的问题,它直接影响控制效果的好坏,并和系统的安全、经济运行有着密不可分的关系。
目前PID参数的优化方法有很多,如间接寻优法、梯度法、爬山法等,而在热工系统中单纯形法专家整定法则应用较广。
虽然这些方法都具有良好的寻优特性,但存在着一些弊端,单纯形法对初值比较敏感,容易陷入局部最优化解,造成寻优失败。
专家整定法则需要太多的经验,不同的目标函数对应不同的经验,而整理知识库则是一项长时间的工程。
因此我们选取了遗传算法来进行参数寻优,该方法是一种不需要任何初始信息并可以寻求全局最优解的、高效的优化组合方法。
采用遗传算法进行PID三个系数的整定,具有以下优点:(1)与单纯形法相比,遗传算法同样具有良好的寻优特性,且克服了单纯形法参数初值的敏感性。
在初始条件选择不当的情况下,遗传算法在不需要给出调节器初始参数的情况下,仍能寻找到合适的参数,使控制目标满足要求。
同时单纯形法难以解决多值函数问题以及在多参数寻优(串级系统)中,容易造成寻优失败或时间过长,而遗传算法的特性决定了它能很好地客服以上问题。
(2)与专家整定相比,它具有操作方便、速度快的优点,不需要复杂的规则,只通过字串进行简单地复制、交叉、变异,便可达到寻优。
避免了专家整定法中前期大量的知识库整理工作及大量的仿真实验。
(3)遗传算法是从许多点开始并行操作,在解空间进行高效启发式搜索,克服了从单点出发的弊端及搜索的盲目性,从而使寻优速度更快,避免了过早陷入局部最优解。
(4)遗传算法不仅适用于单目标寻优,而且也适用于多目标寻优,根据不同的控制系统,针对一个或多个目标,遗传算法均能在规定的范围内寻找到合适参数。
遗传算法作为一种全局优化算法,得到越来越广泛的应用。
近年来,遗传算法在控制上的应用日益增多。
二、基于遗传算法的PID整定原理1、参数的确定及表示首先确定参数范围,该范围一般是由用户给定,然后由精度的要求,对其进行编码。
基于遗传算法的协调控制系统鲁棒PID参数寻优
基于遗传算法的协调控制系统鲁棒PID 参数寻优谢谢, 曾德良,刘吉臻,闫姝,刘继伟华北电力大学控制与计算机工程学院,北京市,中国,102206****************.cn【摘要】针对火电机组的机炉协调模型,提出了一种基于遗传算法的协调控制系统多变量鲁棒PID 参数寻优方法。
该方法以控制器的设定点跟踪性能为寻优目标,鲁棒性能作为约束惩罚条件,采用遗传算法对控制器参数进行寻优。
将该方法与鲁棒 控制器降阶后所得的PID 控制器进行比较,仿真结果表明,本文设计的控制器具有更好的负荷设定值跟踪性能,并且具有良好的鲁棒性。
【关键词】协调控制;鲁棒性能; PID 控制器; 遗传算法近年来,新能源发电规模化的接入电网,为保证电网的稳定运行,大型火电机组必须参与调峰,由于负荷波动频繁,这就要求机组的协调控制系统具有良好的鲁棒性和响应负荷指令的快速性。
火电机组的机炉协调系统是一个具有非线性、强耦合、时变的复杂多变量系统,许多先进的控制策略针对该系统进行了研究,如模糊多模型控制、鲁棒控制、预测控制等,但这些控制策略在现场难以实现。
而PID 控制器因其结构简单,易于实现,广泛应用于工业过程控制,在我国现有的热工过程控制中,90%的控制器仍是PID 控制器,因此,优化协调控制系统PID 控制器有很重要的现实意义。
文献[1] 将控制器的抗干扰性能作为寻优目标,利用遗传算法寻优协调控制系统的PID 参数,并对寻优所得的PID 控制器进行了鲁棒分析,但该文只对控制器的鲁棒性作了定性的分析;文献[2]提出了一种利用环路成形 的方法设计高阶鲁棒控制器,该方法是通过手动调整权值矩阵来获取合适的鲁棒控制器,需要具有一定的经验;并将鲁棒控制器降阶为多变量PID 控制器,PID 控制器将丧失鲁棒控制器的高频性能。
本文提出的基于遗传算法的协调控制系统多变量鲁棒PID 控制器将负荷指令的跟踪性能作为优化目标,并通过量化鲁棒性能,将其作为性能约束嵌入到遗传算法中。
基于遗传算法的PID控制器参数优化
基于遗传算法的PID控制器参数优化遗传算法是一种模拟生物进化过程的智能算法,适用于解决优化问题。
在PID控制器设计中,参数的选择对控制系统的性能和稳定性有很大影响。
使用遗传算法对PID控制器参数进行优化,能够自动找到最优参数组合,提高系统的控制性能。
PID控制器由比例(P)、积分(I)、微分(D)三个部分组成,其输出是通过对误差的线性组合得到的。
参数的选择直接影响控制器的稳定性、动态响应和抗干扰能力。
传统的方法通常是通过试错法进行参数整定,这种方法的缺点是效率低、调试过程繁琐且容易出错。
遗传算法是一种模拟自然界进化过程的智能优化算法,其中每个个体代表一组可能的参数,通过适应度函数来衡量个体的适应度,并选择适应度较高的个体进行遗传和变异操作,最终找到适应度最优的个体。
将遗传算法应用于PID控制器参数优化的步骤如下:1.确定优化目标:通过设置适应度函数来度量控制系统的性能指标,如超调量、调整时间和稳定性。
2.初始化种群:随机生成一组初始参数作为初始种群,并利用适应度函数来评估每个个体的适应度。
3.选择操作:根据适应度选择一部分适应度较高的个体作为父代,通过选择操作进行选择。
4.交叉操作:将选中的父代进行交叉操作,生成新的子代个体。
5.变异操作:对子代进行变异操作,引入新的个体差异。
6.评估适应度:利用适应度函数评估新生成的子代个体的适应度。
7.判断终止条件:判断是否满足终止条件,如达到最大迭代次数或找到满足条件的解。
8.更新种群:根据选择、交叉和变异操作的结果,更新种群。
9.重复步骤3-8,直到满足终止条件。
10.输出最优解:输出适应度最好的个体参数作为PID控制器的优化参数。
使用遗传算法进行PID控制器参数优化有如下优点:1.自动化:遗传算法能够自动寻找最优参数组合,减少了人工试错的过程。
2.全局:遗传算法具有全局的能力,能够参数空间的各个角落,找到更好的解决方案。
3.鲁棒性:遗传算法能够处理多变量、多模态和不连续的问题,具有较好的鲁棒性。
利用遗传算法进行PID参数寻优的倒立摆控制系统
遗传算法 G s (A)] 1是一种公认的具有全局最优搜索
能力的优化方法。以往的局部寻优算法如梯度下降法是 确定性 的方法,而且其寻优效果往往取决于是否设定了 合适的初始值。而遗传算法是一种随机性的全局优化方 法,除非人为终止,其进化过程将永无休止,因而其随 机特性使其可以跳出局部极值的误区而最终发现全局最 优。另外,遗传算法的初始值可以随机设定。 本文为小车倒立摆系统设计了一个 P I D控制器,然 后利用遗传算法对控制器的 8 个参数进行 自寻优。在对 遗传算法的染色体进行编码时本文采用了一种创新的方 法 ,将 8 个参 数构成 一个 2 4的矩 阵 ,从 而保 证 了交 x
遗传算法的搜索过程如下川:
() 1 初始化种群 ;
( ]= . , . , 倒立摆偏角甲 通过同 o T [ 0 0 0 9 oT ) 0 5 , ] 0 。 可以 轴旋转电 位计送出 正比T 信号。 的电
由图I P 0 可见,C 是小车的不稳定平衡点,只要 二
稍有干扰,倒立着的单摆马上会倒下去。相反,如果这 时采用合适的控制信号 u ) ( ,使小车以一定的规律来 c 回跑动,倒立的单摆就可以在垂直平面内稳定下来。这 对控制系统提出了很高的要求,因此小车倒立摆也成为 评价控制系统性能的有力工具。
wt t s e g . s i t ap ah i ida, . i r m tx x L c sto e h cr o m s I a- i h a l t Tu, h pr c oe v ul i a a aio2 x o is i t m s e. d h m e h h n e n e o n n i d . b y r f 4 , n s f h e n g o o t s
可以看出,倒立摆 的稳定与小车的位置 x没有直接关 系,但由于小车运动边界的限制,小车不可以毫无限制
遗传算法对数字PID参数整定
摘要本文使用的是遗传算法对PID控制器参数的整定,PID控制器是过程控制中应用最为广泛的控制方法,PID控制理论成熟、算法简单、鲁棒性好、可靠性高。
控制器参数的选择决定了控制的稳定性和快速性,关乎系统的可靠性。
因此,PID 控制器参数整定问题是自动控制领域研究的一个重要内容。
实际工业生产过程往往具有非线性、时变性,人工试凑的参数整定方法往往整定不良、性能不佳,对运行工况的适应性很差。
本文基于遗传算法对数字PID控制器进行参数整定,可以提高优化性能,缩短整定时间。
关键词:数字PID控制器;参数整定;遗传算法;二次性能指标1引言PID控制作为比较成熟的控制技术广泛应用于工业生产过程,目前绝大多数底层控制都采用PID控制器。
实际应用中控制器的参数往往采用实验试凑的方法人工整定,该方法往往整定不良、性能不佳,而且对运行工况的适应性很差。
近年来随着计算机技术的广泛应用,人工智能算法PID整定策略发展迅速,如模糊PID、专家PID、神经元网络PID以及遗传算法等。
这些算法能够实现提高优化性能,缩短整定时间,实际应用方便的控制目标。
2PID控制器PID控制器是将偏差的比例(P)、积分(I)、微分(D)通过线性组合构成控制量,对被控对象进行控制的。
模拟PID控制的系统原理图如图1所示。
图1. 模拟PID 控制的系统原理图模拟PID 控制规律为位置式:()()()()01=++tp DI de t u t k e t e t dt T T dt ⎡⎤⎢⎥⎣⎦⎰(1) 当系统采样周期为T 时,对上式离散化处理,可得到离散位置式PID 控制表达式:()()()()()=1--1=++kp i dj e k e k u k k e k k e j T k T ∑(2) 式中=/i p I k k T ,=d p D k k T 。
增量式PID 控制表达式可以表示为:()()()=-1+u k u k u k ∆(3)()()()()()()()()()=--1++-2-1+-2p i d u k k e k e k k e k k e k e k e k ∆(4)3 遗传算法遗传算法(Genetic Algorithm )是模拟达尔文生物进化论的自然选择和遗传学机理的生物进化过程的计算模型,将达尔文生物进化理论引入参数寻优之中,适应度高的个体越容易被保留,经过若干代数遗传操作,种群各个体的适应度不断提高,直至满足一定的极限条件,获得优化问题最优解。