弹塑性力学第四章
弹塑性力学第四章答案
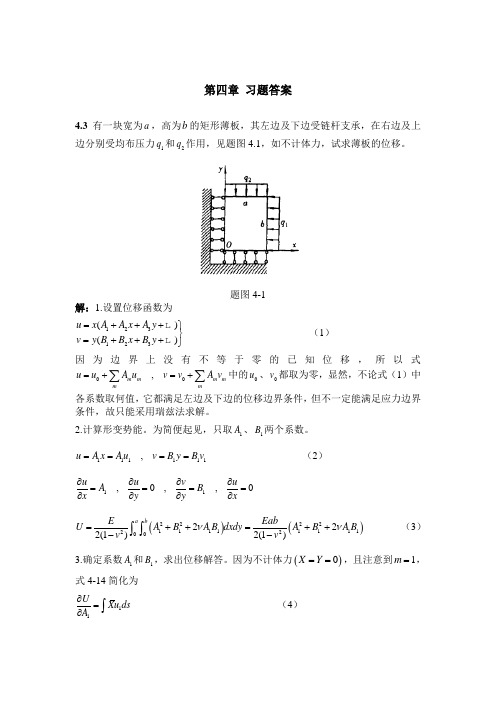
第四章 习题答案4.3有一块宽为a ,高为b 的矩形薄板,其左边及下边受链杆支承,在右边及上边分别受均布压力1q 和2q 作用,见题图4.1,如不计体力,试求薄板的位移。
题图4-1解:1.设置位移函数为123123()()u x A A x A y v y B B x B y =+++⎫⎬=+++⎭(1)因为边界上没有不等于零的已知位移,所以式00,m m m m mmu u A u v v A v =+=+∑∑中的0u 、0v 都取为零,显然,不论式(1)中各系数取何值,它都满足左边及下边的位移边界条件,但不一定能满足应力边界条件,故只能采用瑞兹法求解。
2.计算形变势能。
为简便起见,只取1A 、1B 两个系数。
111111,u A x Au v B y B v ==== (2) 11,0,,0uuvu A B x yyx∂∂∂∂====∂∂∂∂ ()()2222111111112200222(1)2(1)a b E Eab U A B A B dxdy A B A B v v νν=++=++--⎰⎰ (3) 3.确定系数1A 和1B ,求出位移解答。
因为不计体力()0X Y ==,且注意到1m =,式4-14简化为11UXu ds A ∂=∂⎰ (4)11UYv ds B ∂=∂⎰ (5) 对式(4)右端积分时,在薄板的上下边和左边,不是0X =,就是10u =,故积分值为零。
在右边界上有11,,X q u x a ds dy =-===()111bXu ds q ady q ab =-=-⎰⎰ (6)同理,式(5)右端的积分只需在薄板的上边界进行,()1220aYv ds q bdx q ab =-=-⎰⎰ (7)将式(3)、式(6)、式(7)分别代入式(4)、式(5)可解出1A 和1B :()1112222(1)EabA B q ab v ν+=---()1122222(1)EabB A q ab v ν+=--- 121q q A E ν-=-, 211q q B E ν-=- (8) 122111,q q q q u A x x v B y y E Eνν--==-==- (9)4.分析:把式(8)代入几何和物理方程可求出应力分量,不难验证这些应力分量可以满足平衡微分方程和应力边界条件,即式(8)所示位移为精确解答。
工程塑性力学(第四章)弹塑性力学边值问题的简单实例

σθ
−σr
=
2
p
b2 r2
在 r = a 时取最大值,则 r = a 处首先屈服
(σθ
− σ r ) max
=
2
p
b2 a2
=σs
求得弹性极限载荷(压力)为
pe
=
a2σ s 2b2
,
p
=
pe
=
b2 − a2 a2
pe
= σs 2
⎜⎜⎝⎛1 −
a2 b2
⎟⎟⎠⎞
(2)弹塑性解
(4-26)
p > pe 时,塑性区逐渐扩张。设弹、塑性区交界处 r = c , a < c < b 。
b
弹性区
c
用边界条件σ r r=a = − p ,可确定出 C′ = − p − σ s ln a ,
a
所以
⎪⎧σ r ⎨ ⎪⎩σθ
= σ s ln r − p − σ s ln a = − p + σ s
=σs
+σr
=
−p
+ σ s (1 +
ln
r) a
ln
r a
(4-27)
塑性区 图 4-3
属静定问题,未用到几何关系。
ΔFi = F&iΔt , ΔTi = T&iΔt , Δui = u&iΔt
(4-10) (4-11)
式中 F&i ,T&i 和 u&i 分别称为体力率、面力率和位移率(速度)。引入率的表达形式
可以简化公式表达。 求解过程为:
已知时刻 t 时,位移 ui ,应变 εij ,应力σij ,加载面 f (σij ,ξ ) = 0 。在 ST 上给
弹塑性力学(4)

2. 由于真实的位移场(应变场)必须满足位移边界条件,故真实位移场(应 变场)应视为可能位移场(应变场)的家族成员之一。而对于真实位移场 (应变场)还必须满足“应变协调条件”,即应变可积分条件。 3. 一般而言,与满足位移边界条件的连续变形相协调的位移模式有无限多个。 但对于给定的问题,同时又满足应变协调的位移模式仅存在一个,即真实 位移场仅有一个。 4. 在弹性力学问题的求解思路通常有两种:(a)按应力求解,(b)按位移 求解。而仅当按应力求解时才用到应变可积分条件,即式(4.2b)。
§4.4 定义
弹性材料
当一块材料受力后就会变形,如果施加的力撤除后,物体即恢复它原来的形状和 大小,那么这种材料就可称为弹性的。从数学上来说,这种材料的本构方程为:
σij = Fij (εkl )
(4.3)
其中, Fij为弹性响应函数,因此,由上式描述的弹性性能为既可逆又与路 径无关,即应变仅由当前应力状况所决定,反之亦然。上述定义的弹性材 料通常称为Cauchy弹性材料。 在特定的加载-卸载循环下,Cauchy弹性材料可产生能量,显然这是 与热力学定律相违背的。为此,采用术语超弹性或Green弹性材料去表明 式(4.3)中的弹性影响函数进一步受到弹性应变能函数W存在的限制。 一般而言,W是应变分量的函数,即
弹塑性力学第四章

x
y
)
2019/7/26
36
§4-3 各向同性材料弹性常数
yz
2(1 )
E
yz
xy
2(1
E
)
xy
zx
2(1
E
)
zx
采用指标
符号表示:
ij
1 E
(1 ) ij
ij kk
ij
E
1
ij
1 2
ij kk
2G
0 0 0
2G
0
0
0
2G 0 0 0
2G 0
0
对
称
2G 0
2G
2019/7/26
31
§4-3 各向同性材料弹性常数
3.1 本构关系用、G表示
采用指标符号表示:
ij 2Gij ij kk 2Gij iⅠj
2019/7/26
16
§4-2 线弹性体的本构关系
2.1 各向异性材料 Eijkl 减少为66=36个独立系数,用矩阵 表示本构关系
{}=[c]{}
11
22
33
23
31
T 12
11
22
33
23
31
T 12
x3 弹性主轴
材料主轴,并取另一坐标
系x’i ,且x’1 = x1,x’2=x2,
x2
x’3=-x3。在两个坐标下,
弹塑性力学第四章弹性本构关系资料

产生的x方向应变:
叠加
产生的x方向应变:
同理:
剪应变:
物理方程:
说明:
1.方程表示了各向同性材料的应力与应 变的关系,称为广义Hooke定义。也称 为本构关系或物理方程。
2.方程组在线弹性条件下成立。
. 体积应变与体积弹性模量
令: 则: 令:
sm称为平均应力; q 称为体积应变
eij
1 2G
sij
(4.40)
因为 J1 0, J1' 0 ,所以以上六个式子中独立变量只有5个
因此应力偏张量形式的广义虎克定律,即
eij
1 2G
sij
em
1 3K
sm
(4.41)
用应变表示应力:
或: ✓ 各种弹性常数之间的关系
§4-2 线弹性体本构方程的一般表达式
弹性条件下,应力与应变有唯一确定的对应关系,三维 应力状态下,一点的应力取决于该点的应变状态,应力是应 变的函数(或应变是应力的函数) 6个应力分量可表述为6个应变分量的函数。
式(2)中的系数 有36个.
称为弹性常数,共
由均匀性假设,弹性体各点作用同样应力 时,必产生同样的应变,反之亦然.因此 为 常数,其数值由弹性体材料的性质而定.
式(2)推导过程未引用各向同性假设, 故可适用于极端各向异性体、正交各向异性体、 二维各向同性体以及各向同性体等.
式(2)可用矩阵表示
式(3)可用简写为 称为弹性矩阵.
三、. 弹性常数
1. 极端各向异性体:
物体内的任一点, 沿各个方向的性能都不相 同, 则称为极端各向异性体. (这种物体的材料极 少见)
即使在极端各向异性条件下, 式(2)中的36个 弹性常数也不是全部独立.
弹塑性力学 第四章 弹性力学的求解方法

说明: 1、数学上可证明, 当为线弹性小变形情况,求解的 基本方程和边界条件为线性,叠加原理成立。 2、对大变形情况,几何方程出现二次非线性项,平 衡微分方程将受到变形的影响,叠加原理不再适 用。 3、对非线弹性或弹塑形材料,应力应变关系是非线 性的,叠加原理不成立。 4、对载荷随变形而变的非保守力系或边界为
1. 位移法:将几何方程代入物理方程,得到用位移
表示的应力分量,再将应力分量代入平衡方程和应力边 界条件,即得到空间问题的位移法控制方程。不需要用 相容位移表述。 3个位移表述的平衡微分方程,包含3个位 移未知数。 结合边界条件,解上述方程,可求出位移分 量,由几何方程求应变,再由本构方程求应力。
第四章 弹性力学问题的求解方法
§7-1 弹性力学基本方程
1. 平衡微分方程方程
2. 几何方程
3. 物理方程
各种弹性常数之间的关系
4. 相容方程
• 求解物理量:6个应力分量 6个应变分量 3个位移分量
共15个未知量
用于求解的方程:平衡微分方程 3个 几何方程 6个
共15个方程
本构方程
6个
用非线性弹簧支承的情况,边界条件是非 线性的,叠加原理也将失效。
二. 解的唯一性定理:
在给定载荷作用下,处于平衡状态的弹性体, 其内部各点的应力、应变解是唯一的,如物体刚 体位移受到约束,则位移解也是唯一的。 无论何方法求得的解,只要能满足全部基本方 程和边界条件,就一定是问题的真解。
三.圣维南原理: 提法一:若在物体的一小部分区域上作用一自平衡力系,则 此力系对物体内距该力系作用区域较远的部分不产生 影响只在该力系作用的区域附近才引起应力和变形。 提法二:若在物体的一小部分区域上作用一自平衡力系,该 力系在物体中引起的应力将随离力系作用部分的距离 的增大而迅速衰减,在距离相当远处,其值很小,可 忽略不计。 提法三:若作用在物体局部表面上的外力,用一个静力等效 的力系(具有相同的主矢和主矩)代替,则离此区域较 远的部分所受影响可以忽略不计。
弹塑性力学第四章 弹性本构关系

(4.36) (4.37) (4.38)
K称为体积弹性模量,简称体积模量。
因此
q
sm
K
,em
sm
3K
1 3 1 1 ex e x e m ( sx sm) sm sx E E 3K 2G
1 ey e y e m sy 2G
1 eij sij 2G
(4.40)
1 eij sij 2G 1 em sm 3K
(4.41)
用应变表示应力:
或:
各种弹性常数之间的关系
§4-2 线弹性体本构方程的一般表达式
弹性条件下,应力与应变有唯一确定的对应关系,三维 应力状态下,一点的应力取决于该点的应变状态,应力是应 变的函数(或应变是应力的函数) 6个应力分量可表述为6个应变分量的函数。
• 材料的应力与应变关系需通过实验确定的。 • 本构方程实际是应力与应变关系实验结果的数学 描述。 • 由于实验的局限性,通常由简单载荷实验获得应 力与应变关系结果,建立描述相应的数学模型, 再将数学模型用于复杂载荷情况的分析。(用一 定实验验证结果)
• 例如:材料单轴拉伸应力-应变z e m sz 2G
1 1 1 1 yz s yz exy e xy xy sxy eyz e yz 2G 2G 2G 2G
1 1 exz e xz xz sxz 2G 2G
整理以上六个式子,得 整理以上六个式子,得
因为 J1 0, J1' 0 ,所以以上六个式子中独立变量只有5个 因此应力偏张量形式的广义虎克定律,即
物理方程:
s ij 3 1 3 e ij s ij s m ij s m ij E E 2G E
弹塑性力学第四章

y c21 x c22 y c23 z z c31 x c32 y c33 z
x 对 x 的影响应与 y 对 y 及 z 对 z 的影响相同,即 c11 c22 c33
y , z 对 x 的影响应相同,即 同理,
因而有:
c12 c13
c11 c22 c33 a c12 c21 c13 c31 c23 c23 b
对于应变主轴,弹性常数只有两个。
广义胡克定律
各向异性弹性体独立的常数有21个。 系数矩阵对称 Cmn Cnm 广 西 工 具有一个弹性对称面的各向异性弹性体的独立常数有13个。 学 院
广义胡克定律
x x , y y , z z , xy xy , yz yz , xz xz
广 西 工 学 院 汽 车 工 程 系
x x , y y , z z , xy xy , yz yz , xz xz
广 西 工 学 院
x 汽 x 车 工 2 2 2 x l11 y l12 z l13 2 xy l11l12 yz l12l13 xz l11l13 x x 程 系 ,
y y z z
z
y
y
z
ij liil jj ij
车 工 程 系
弹性对称面:如果物体内存在这样一个平面,和该平面对称的 汽 两个方向都具有相同的弹性,则该面称为物体的弹性对称面。 弹性主方向:垂直于弹性对称面的方向 具有三个弹性对称面的各向异性弹性体(正交各向异性)的 独立常数有9个。
广义胡克定律
证明:正交各向异性弹性体的独立常数有9个。 证明:取弹性主轴为三个坐标轴,将z轴旋转180度
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
代入广义胡克定律
x c11 x c12 y c13 z c14 xy c15 yz c16 zx
x c11 x c12 y c13 z c14 xy c15 yz c16 zx
c11 x c12 y c13 z c14 xy c15 yz c16 zx
b
广义胡克定律
由应力分量的坐标变换公式(2-20)可得:
广 西 工 学 院 汽 车 工 程 系
xy l11l22 xy xy 2 x l11 x x 2 y l22 y y 2 z l33 z z
上述关系式是胡克(Hooke)定律在复杂应力条件下 的推广,因此又称作广义胡克定律。
广义胡克定律
广义胡克定律的张量表示: ij cijkl kl cijkl 称为弹性系数,一共有36个。
i, j, k , l 1, 2.3
广 西 工 学 院 汽 车 工 程 系
如果物体是非均匀材料构成的,物体内各点受力后将 有不同的弹性效应,因此一般的讲,cmn 是坐标x,y,z 的函数。 如果物体是由均匀材料构成的,那么物体内部各点, 如果受同样的应力,将有相同的应变;反之,物体内各 点如果有相同的应变,必承受同样的应力。 因此cmn为弹 性常数,与坐标无关。 各向同性材料,独立的弹性常数只有两个。
xy yz zx
xy
G
yz
G
zx
G
式中, G
E 2 1 v
为各向同性物体的剪切弹性模量。
表示材料弹性性能的常数有3个,但只有两个是独立的。 张量记法:
1 v v ij ij E E vE ij e E ij ij 1 v 1 v 1 2v
同理可得: yz 0, zx 0
因此,对于各向同性弹性体,主应变方向必为主应力方向。
广义胡克定律
证明:各向同性均匀弹性体的弹性常数只有两个。
广 西 工 学 院 汽 车 工 程 系
证明:令坐标轴与主应力方向一致,则主应力与主应变间 的关系为: c c c
x 11 x 12 y 13 z
广义胡克定律
二、各向同性弹性体广义胡克定律的几种形式 令坐标轴与主应力方向一致,则
广 西 工 学 院 汽 车 工 程 系
x c11 x c12 y c13 z y c21 x c22 y c23 z z c31 x c32 y c33 z
(2-20)
xy l21l31 x l22l32 y l23l33 z
xy l11l22 l12l21 yz l12l23 l13l22 xz l13l21 l11l23 xy
yz yz , xz xz
1 1
xy xy xy xy xy xy
i j i j
2 e 2 2 3 e 2 3
坐标变换
y e 2 y , z e 2 z ,
, 称为拉梅弹性常数。
1, ij ij e 2 ij , = 0,
c11 c22 c33 a c12 c21 c13 c31 c23 c23 b
令 a b 2 , b , e 1 2 3 ,则 1. 弹性拉梅弹性常数表示的广义胡克定律 x e 2 x , e 2
广 西 工 学 院
x 汽 x 车 工 2 2 2 x xl11 y l12 z l13 2 xy l11l12 yz l12l13 xz l11l13 x 程 系 y y , z z
z
y y
z
ij lii l jj ij
x
E
(4-6,4-7)
x
x
比较以上式子可知:
E
3 2 ,v 2
广义胡克定律
代入广义胡克定律,得
广 西 工 学 院 汽 车 工 程 系
1 x x v y z , E 1 y y v x z , E 1 z z v x y , E
ij
广义胡克定律
3. 用应力偏量和应变偏量表示的广义胡克定律
广 西 工 学 院 汽 车 工 程 系
m
1 x y z x y z x y z 3 3E 1 1 1 2 1 2 x y z m m 3K 3E E
应力 理论 应变 理论
平衡微分方程 (应力分量与体力
的关系)
边界条件 几何方程 (应变分量与位移
的关系)
变形协调方程
广 西 工 学 院 汽 车 工 程 系
广义胡克定律
广义胡克定律
一、广义胡克定律
广 西 工 学 院 汽 车 工 程 系
大量实验表明,在许多工程材料的弹性范围内,单向的应 力和应变之间存在着线性关系: E 材料的变形属性与坐标无关。
广义胡克定律
2. 用弹性模量和泊松比表示的广义胡克定律 将(4-3)式中的应变解出来,可得 x e 2 x x x x y 3 2 2 3 2 (4-5) y e 2 y
因而有:
c11 c22 c33 a
c12 c13
c12 c21 c13 c31 c23 c23 b
对于应变主轴,弹性常数只有两个。
广义胡克定律
各向异性弹性体独立的常数有21个。 系数矩阵对称 Cmn Cnm 广 西 工 具有一个弹性对称面的各向异性弹性体的独立常数有13个。 学 院
m
e x y z 3 m
ij ij e 2 ij
1 m 3K 2 K 3
对比等式两边,可得: sij 2Geij
广义胡克定律
广义胡克定义可写为
m 3K m
sij 2Geij
广 物体的变形可分为两部分:一部分是各向相等的正应力引起的 西 工 相对体积改变;一部分是应力偏量引起的物体几何形状的变化。 学 V 院
广义胡克定律
x x , y y , z z , xy xy , yz yz , xz xz
广 西 工 学 院 汽 车 工 程 系
x x , y y , z z , xy xy , yz yz , xz xz
根据正交各向异性弹性体的性质可知: x x
对比以上两式可得:
c15 c15 , c16 c16 c15 c16 0
同理可得:
c25 c26 c35 c36 c45 c46 0
广义胡克定律
将x轴旋转180度,采用和前面相同的方法,可得:
c14 c24 c34 c56 0
广 西 工 学 院 汽 车 工 程 系
z z
x
y y
将y轴旋转180度,可得: 与前一步骤相同
c14 c24 c34 c56 0
x
如果三个相互垂直的平面中有两个是弹性对称面,则第 三个平面必然也是弹性对称面。
c11 c12 c13 c22 c23 c33 c 对 称 0 0 0 c44 0 0 0 0 c55 0 0 0 0 0 c66
y y x y 3 2 2 3 2
广 西 工 学 院 汽 车 工 程 系
z e 2 z
E,
分别为杨氏弹性模量和泊松比。
右图所示应力状态时,由材料力学可知:
x x
E , y v
e x y z
三维:应力和应变关系的一般表达式为:
对于小变形问题,上述表达式展开成泰勒级数,并且略 去二阶以上的高阶小量。
初始 应力
广义胡克定律
根据无初始应力的假设,(f 1)0应为零。对于均匀材料, 材料性质与坐标无关,因此函数 f 1 对应变的一阶偏导数为常 数。因此应力应变的一般关系表达式可以简化为
广 西 工 学 院 汽 车 工 程 系
y c21 x c22 y c23 z z c31 x c32 y c33 z
x 对 x 的影响应与 y 对 y 及 z 对 z 的影响相同,即 c11 c22 c33
同理, y , z 对 x 的影响应相同,即
车 工 程 系
弹性对称面:如果物体内存在这样一个平面,和该平面对称的 汽 两个方向都具有相同的弹性,则该面称为物体的弹性对称面。 弹性主方向:垂直于弹性对称面的方向 具有三个弹性对称面的各向异性弹性体(正交各向异性)的 独立常数有9个。
广义胡克定律
证明:正交各向异性弹性体的独立常数有9个。 证明:取弹性主轴为三个坐标轴,将z轴旋转180度
由 (c)式代入 (b)式 ,可得出:
xy c41 x c42 y c43 z
xy c41 x c42 y c43 z
c
b
xy c41 x c42 y c43 z
a
d
比较(a) , (b)可得: xy xy ,所以,必定有 xy 0
x y z
ij sij m ij ij e 2 ij ij 2G eij m ij 2Geij 3 G m ij 3
2