同济大学_汽车学院_汽车振动_郭荣_chapter2_作业答案
大学 机械振动 课后习题和答案(1~4章 总汇)

1.1 试举出振动设计、系统识别和环境预测的实例。
1.2 如果把双轴汽车的质量分别离散到前、后轴上去,在考虑悬架质量和非悬架质量两个离散质量的情况下,画出前轴或后轴垂直振动的振动模型简图,并指出在这种化简情况下,汽车振动有几个自由度?1.3 设有两个刚度分别为1k ,2k 的线性弹簧如图T —1.3所示,试证明:1)它们并联时的总刚度eq k 为:21k k k eq +=2)它们串联时的总刚度eq k 满足:21111k k k eq +=解:1)对系统施加力P ,则两个弹簧的变形相同为x ,但受力不同,分别为:1122P k xP k x=⎧⎨=⎩由力的平衡有:1212()P P P k k x =+=+故等效刚度为:12eq Pk k k x ==+2)对系统施加力P ,则两个弹簧的变形为: 1122Px k Px k ⎧=⎪⎪⎨⎪=⎪⎩,弹簧的总变形为:121211()x x x P k k =+=+故等效刚度为:122112111eq k k P k x k k k k ===++1.4 求图所示扭转系统的总刚度。
两个串联的轴的扭转刚度分别为1t k ,2t k 。
解:对系统施加扭矩T ,则两轴的转角为: 1122t t Tk T k θθ⎧=⎪⎪⎨⎪=⎪⎩系统的总转角为:121211()t t T k k θθθ=+=+,12111()eq t t k T k k θ==+故等效刚度为:12111eq t t k k k =+1.5 两只减振器的粘性阻尼系数分别为1c ,2c ,试计算总粘性阻尼系数eq c1)在两只减振器并联时,2)在两只减振器串联时。
解:1)对系统施加力P ,则两个减振器的速度同为x ,受力分别为:1122P c x P c x =⎧⎨=⎩ 由力的平衡有:1212()P P P c c x =+=+故等效刚度为:12eq P c c c x ==+ 2)对系统施加力P ,则两个减振器的速度为:1122P x c Px c ⎧=⎪⎪⎨⎪=⎪⎩,系统的总速度为:121211()x x x P c c =+=+ 故等效刚度为:1211eq P c x c c ==+1.6 一简谐运动,振幅为0.5cm,周期为0.15s,求最大速度和加速度。
同济大学汽车试验学考卷考题答案
欢迎共阅同济大学汽车实验学题目填空题(45分)1.分析系统动态特性可用时域分析法和频域分析法,在用频域分析法中,通过傅里叶变换,描述系统的特性函数H(f)称为(频响函数),还可以用其对应幅值关系的(幅频函数)和对应相位关系的(相频函数)来描述。
2.一阶动态系统的特征是(时间常数τ)二阶动态系统的特征参数是性补偿的方法由(串联补偿电阻补偿法、推挽补偿法)13.电容式传感器的电容量C与(极板面积大小、极板间距离和介电质常数)等参数有关,其中与变量___的表达式为非线性。
14.噪声测量的客观量有(声压与压级、声强与声强级、声功率和声功率级), 它们是客观描述声音的物理量.而描述声音的主观量是模拟正常人的听力的强度,为(响度和响度级).对噪声的主观评价方法有(纯音噪音和复合音噪音)简答及问答:(40分)1.什么是应变片的横向效应,为什么会产生横向效应?(p.53)由于横向段的存在,感受横向应变而使电阻变化化率减小并降低灵敏度的现象。
原因:理想的电阻应变片输出应该完全是片长方向上的变形,但由于电阻片是制成栅状的,它存在横向段,所以会产生横向效应。
2.电阻位移计出现最大误差的位置在什么地方?其误差的产生与什么因素有关?减小误差的方法是什么?3.简述霍尔效应以及霍尔传感器的基本原理。
霍尔效应:金属或半导体薄片,若在它两端通以控制电流I,并在薄片的垂直方用差动法计算其灵敏度和非线性误差.C=εA/δ,其中δ为电容两极板的距离,A为极板面积,ε为介电常数,C为电容.答:原理及优点:使用两个具有特性方程的装置,使其中一个装置输入端作用一个正变量的输入信号时,另一个装置的输入端作用一个绝对值与前相等的负变量输入信号,其总输出为这两个装置的输出之差;两个优点:(1)输出增加一倍;(2)非线性误差大大减小;2.为测量某轴的转动功率,用测量轴受到的力矩M和轴的转速ω进行间接测量. 测得轴受到的力矩为M1,转速ω1其理想值应为M和ω,试计算转动功率N=Mω的相对误差和绝对误差。
同济大学_汽车学院_汽车振动_郭荣_chapter3_作业答案
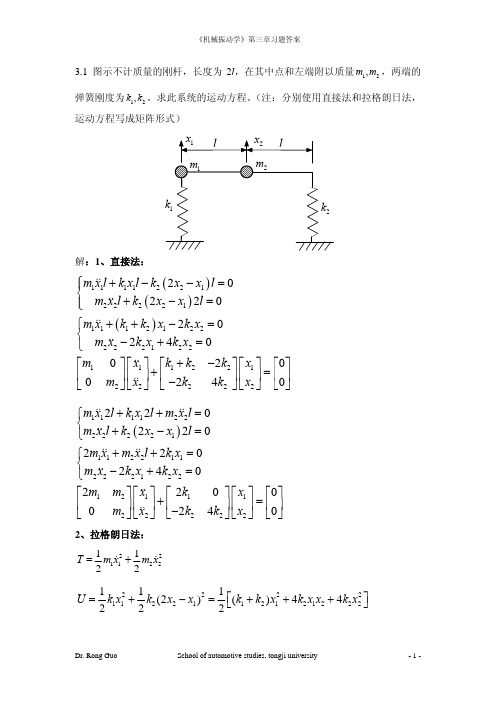
2、拉格朗日法:
1 1 2 12 + m2 x 2 T = m1 x 2 2
U=
1 2 1 1 2 ⎤ k1 x1 + k2 (2 x2 − x1 ) 2 = ⎡ (k1 + k2 ) x12 + 4k2 x1 x2 + 4k2 x2 ⎣ ⎦ 2 2 2
Dr. Rong Guo
School of automotive studies, tongji university
取质量中心的平动和转动为两个运动坐标试确定该系统的刚度矩阵和质量矩阵并求系统的特征值和特征向量
《机械振动学》第三章习题答案
3.1 图示不计质量的刚杆,长度为 2l,在其中点和左端附以质量 m1 , m2 ,两端的 (注:分别使用直接法和拉格朗日法, 弹簧刚度为 k1 , k2 。求此系统的运动方程。 运动方程写成矩阵形式)
-6-
⎡ k2 ⎢ −k Kb = ⎢ 2 ⎢ 0 ⎢ ⎣ 0
− k2 k 2 + k3 − k3 0
0 − k3 k3 + k 4 − k4
0 ⎤ 0 ⎥ ⎥ − k4 ⎥ ⎥ k4 ⎦
School of automotive studies, tongji university
《机械振动学》第三章习题答案
②
k 2 1 = k1 2 = 0
θ1 = 0, θ 2 = 1
k22 = m2 gl2
⎡( m + m2 ) gl1 0 ⎤ K =⎢ 1 ⎥ m2 gl2 ⎦ 0 ⎣
质量矩阵:
= 1, θ = 0 ① θ 1 2
m21 = m12 = m2l1l2 m11 = m1l12 + m2l1 ( l1 + l2 ) − m2l1l2 = ( m1 + m2 ) l12
振动习题完整版本

机械振动习题集同济大学机械设计研究所2004.91_简谐运动及其运算1-1 求下列简谐函数的单边复振幅和双边复振幅(1) x 2sin( t )(2) x 4 cos(10 t ) ( 3) x 3 cos(2 t 45 )341-2 通过简谐函数的复数表示,求下列简谐函数之和。
(1)x12sin( t 3)x23sin( t3)(2)x15sin 10 tx 24 cos(10 t4)(3) x 1 4 sin(2 t 30 ) x 2 5 sin( 2 t 60 )x 3 3cos(2 t 45 )x 47cos(2 t38 )x 5 2 cos(2 t 72 )答案:(1) x 124.359 cos( t 6.6)(2) x 12 3.566 cos(10 t 47.52 )(3) x 12345 14.776 cos(2 t9.22 )1-3试计算题 1中 x(t)的一阶对数和二阶导数对应的复振幅,并给出它们的时间历程。
1-4 设 x(t)、 f(t) 为同频简谐函数,并且满足 ax bx cx f(t) 。
试计算下列问题 (1)已知 a 1.5,b 6,c 25,x(t) 10 sin(12 37 ) ,求 f(t)(2)已知 a 3,b 7,c 30, f (t) 25 sin(7 64 ),求 x(t)1-5 简述同向异频简谐振动在不同频率和幅值下合成的不同特点。
1-6 利用“振动计算实用工具” ,通过变换频率和相位总结垂直方向振动合成的特点。
2_单自由度系统振动2-1 请解释有阻尼衰减振动时的固有圆频率d为什么总比自由振动时的固有圆频率n小?答案:因为 d 1 2 n , <12-2 在欠阻尼自由振动中,把 改成 0.9 的时候,有人说曲线不过 X 轴了,这种说法正确么,请说明理由?答案: <1 为小阻尼的衰减振动,当然过 X 轴2-3 在单自由度自由振动时候,给定自由振动时的固有圆频率n ,阻尼系数 ,初始位移 x 0,以及初始速度 v 0 ,利用本计算工具 ,请计算有阻尼衰减振动时的固有圆频率d .答案:如n =3rad/s, =0.01, x 0 =-1, v 0=0;则 d =2.9985rad/s 2-4 如图 2-1 所示,一小车(重 P )自高 h 处沿斜面滑下,与缓冲器相撞后,随同缓冲器一 起作自由振动。
同济汽车理论复试

(一)一、概念解释(选其中10题,计20分)1汽车使用性能2 滚动阻力系数3 牵引力与(车轮)制动力4 汽车驱动与附着条件5 汽车动力性及评价指标6 回正力矩7 临界车速8 滑移(动)率9 侧向偏离10 制动距离11 汽车动力因数12 汽车通过性几何参数13 汽车(转向特性)的稳态响应14 汽车前或后轮(总)侧偏角二、写出表达式、画图、计算,并简单说明(选择其中5道题,计20分)1 用结构使用参数写出汽车功率平衡方程式2 写出n档变速器m档传动比表达式3 画图并说明地面制动力、制动器制动力、附着力三者关系4 简述图解计算燃料消耗量的方法5 写出汽车的后备功率方程式,其对汽车的动力性和燃料经济性有何影响?6 写出可以绘制I曲线方程或方程组三、叙述题(选择其中5道题,计20分)1 从制动侧滑受力分析和试验,可以得出哪些结论?2 写出计算汽车动力因数的步骤,并说明其在计算汽车动力性的用途。
3 写出计算汽车加速性能的步骤。
4 写出制做汽车的驱动力图的步骤?5 如何选择汽车发动机功率?6 画出制动时车轮的受力简图并定义符号。
7 分析汽车紧急制动过程中减速度的变化规律?8 在侧向力的作用下,刚性轮胎和弹性轮胎行驶方向的变化规律(假设驾驶员不对汽车的行驶方向进行干预)?四、分析题(选择其中5道题,计20分)1 如何确定传动系最小传动比2 已知某汽车φ0=0.4,请利用I、β、f、γ线,分析φ=0.5,φ=0.3以及φ=0.7时汽车的制动过程。
3 汽车在水平道路上,轮距为B,重心高度为h g,以半径为R做等速圆周运动,汽车不发生侧翻的极限车速是多少?该车不发生侧滑的极限车速又是多少,并导出汽车在该路段的极限车速?4 在划有中心线的双向单车道的本行车道上,汽车以40km/h的初速度实施紧急制动,仅汽车左侧轮胎在路面留下制动拖痕,但是,汽车的行驶方向几乎没有发生变化,请产生分析该现象的各种原因。
5 请分析制动力系数、峰值附着系数、滑动附着系数与滑动率的关系。
同济大学-流体力学考题(实验部分)_A-B
汽车空气动力学考试题及参考答案(试验部分)A 卷1. 以下各项为中国汽车工程师协会发表的《汽车工程手册—试验篇》中关于汽车工程试验的类别(部分),请选出4种与空气动力学有关的、可能在汽车风洞中进行的试验课题(8’)。
1) 动力传动系性能试验2) 操纵稳定性试验3) 振动与噪声试验4) 可靠性试验5) 碰撞安全性试验6) 空气动力特性试验7) 驾驶方便性、合适性和平顺性试验8) 汽车电子电气系统试验9) 环境保护试验10) 车身试验参考答案:3)4)7)10)评分标准:每点答对2分2. 汽车空气动力学试验可以用实车在路面上进行,简称为“路试”,但是更多的空气动力学研发试验在汽车风洞中进行,请简述在汽车风洞中进行试验的主要优点(6’)。
参考答案要点:1) 经济型;2) 试验效率;3) 重复性。
评分标准:回答正确每要点2分。
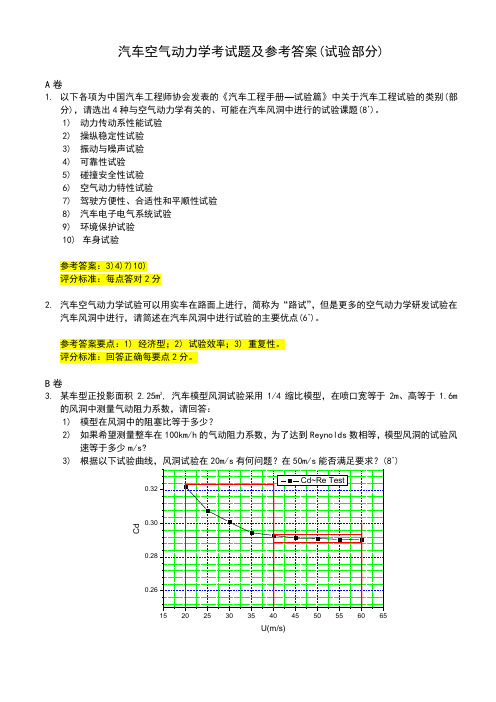
B 卷3. 某车型正投影面积2.25m 2, 汽车模型风洞试验采用1/4缩比模型,在喷口宽等于2m 、高等于1.6m 的风洞中测量气动阻力系数,请回答:1) 模型在风洞中的阻塞比等于多少?2)速等于多少m/s? 3) ’)0.260.280.300.320.34C d U(m/s)参考答案和评分标准:1) 阻塞比 = 模型投影面积 / 风洞喷口面积 = (2.25*(1/4)^2)/ (2*1.6) = 4.4% (2’)2) Re = νUL ,雷诺数相等,则4L L U U modelfull full model ==,Umodel = 100/3.6*4 = 111m/s (3’) 3) 根据雷诺数试验曲线,20m/s 时阻力系数随雷诺数增大减小明显,阻力系数测量值较真值偏大较多;而50m/s 时,阻力系数随雷诺数变化很小了,可以代表实际结果。
(3’)4. 汽车风洞试验主要设计三个学科方向,请问是哪三个学科方向?(6’)参考答案要点:1) 空气动力学;2) 气动声学;3) 热力学。
同济大学_汽车学院_汽车振动_郭荣_chapter2_作业答案

解:设 m2 的线位移为 x,由能量法
Ua
=
1 2
⎛ k1 ⎜
⎝
a2 a4
⎞2 x⎟
⎠
+
1 2
k2
⎛ ⎜ ⎝
a3 a4
⎞2 x⎟
⎠
=
1⎛
2
⎜ ⎝
k1a22 + k2a32 a42
⎞ ⎟
x
2
,
⎠
又
Ue
=
1 2
ke x2
故
ke
=
k1a22 + k2a32 a42
Ta
=
1 2
m1
⎛ ⎜ ⎝
a1 a4
x
⎞2 ⎟
215一个有阻尼弹簧质量系统受到简谐激励力的作用求发生加速度共振时的频率比时发生加速度共振216在图示的弹簧质量系统中在两弹簧连接处作用一激励力
2.1 如图所示系统中,已知 m1, m2 , k1, k2 , a1, a2 , a3, a4 , 水平刚杆的质量忽略不计。以 m2 的线位移为运动坐标,求系统的等效刚度 ke ,等效质量 me 以及固有频率。
(1) 第一次到达静平衡位置的时间? (2)过静平衡位置后的最大幅值为多少?所需时间为多少?
解: 临界阻尼状态下系统自由振动的解为:
x = e−ω0t ⎡⎣ x0 + ( x0 + ω0 x0 ) t ⎤⎦
(1) 平衡位置x = 0
ω0 =
k = 10rad / s m
代入式中,t=- x0
x0 + ω0 x0
解:
Jθ + kb (bθ − e cosωt ) − mgaθ = 0
( ) 变换得: ma2θ+ kb2 − mga θ = kbe cosωt
同济大学物理大作业解答4至6章答案

第四章(一) 振动学基础解答一、选择题1.D 2.B 3.C 4.C 5.B 6.B 7.D 8.B二、填空题1.振动系统自身的性质;π2秒内的的振动次数;振动系统运动的初始条件;表示振动的幅度或振动的强度;表征计时零点的振动状态。
2.;cm 2 ;4s ;1-s 2π ;π23 )232cos(02.0ππ+t ;m )232s i n (01.0πππ+-t -1s m ⋅;)232cos(201.02πππ+-t -2s m ⋅; ππ或33.0.158 m ; 0.5 s ; 2π4.)41cos(02.0ππ+t m ; )43c o s (02.0ππ+t m5.π326.8T , T 83 7.ππ232或-8.合力的大小与位移成正比,方向与位移方向相反; 0d d 222=+x tx ω三、计算题1.解:(1) s 638.084.922,s84.9258.0251-======πωπωT mk(2) m/s 17.03sin02.084.9sin ,30-=⨯⨯-=-==πϕωπϕA v (3) )384.9cos(02.0)cos(πϕω+=+=t t A x m2.解:(1))32cos(3πππϕ-=-=t T A x (2)0=a ϕ,2πϕ=b(3)作振幅矢量图,得到: 6233T Tt a ===ππωπ125223T Tt b =⎪⎭⎫⎝⎛=πππ+3.解:木块下移时,恢复力 )1(22xgL gxLf -=-=水ρmk =ω , 由(1)式知 2gL k =所以,木块做简谐运动。
在水中的木块未受压而处于平衡时 a gL mg 2水ρ= ,于是可求得ag aL gLm k ===22水ρω ga T πωπ22==振幅:a b A -=4.解:(1)两个同方向、同频率简谐运动的合振动仍为简谐运动,且合振动的频率与分振动的频率相同,即121s 3-===ωωω合振动振幅A 和初相0ϕ为 ()cm 52cos 43243cos 22221212221=⨯⨯++=++=πϕϕ-A A A A A︒==+︒+︒=++=--13.5334tg 24cos 3cos024sin 3sin0tgcos cos sin sin tg11-2211221110ππϕϕϕϕϕA A A A即0ϕ在第一象限内。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
⎛ ⎜⎜⎝
k1k2
4(k1 + k2 )
⎞ ⎟⎟⎠
x2
Ue
=
1 2
ke x2
可得: ke
=
k1k2
4(k1 + k2
)
于是
f= 1 4π
k1k2
(k1 + k2 ) m
2.4 求图示系统的等效刚度。
解: ① 力和力矩分析
⎧ ⎨ ⎩
F1 + F2 = F1a = F2b
F
可得:
→
⎧⎨k1 ⎩ k1
x1 + k2 x2 = x1a = k2 x2b
(a + b)2 k1k2
F
→
F
=
(a + b)2 k1k2
a2k1 + b2k2
x
等效刚度为:
ke
=
(a + b)2 k1k2
a2k1 + b2k2
2.5 设有一均质等截面简支梁如图。在中间有一集中质量 m。如把梁本身质量 M 考虑在内,试计算此系统的等效质量。假定梁在自由振动时的动挠度曲线和简支 梁中间有集中静载荷作用下的静挠度曲线一样。
⎛ ⎜⎝
系统作微振动 sin θ
≈
θ;
1− cosθ
≈
1θ2 2
⎞ ⎟⎠
解:
(1)求总势能
( ) a:U = 1 k (a sinθ )2 + mgl(1 − cosθ ) ≈ 1 ka2 + mgl θ 2
2
2
b:U = 1 k (a sinθ )2 ≈ 1 ka2θ 2
2
2
( ) c:U = 1 k (a sinθ )2 − mgl(1 − cosθ ) ≈ 1 ka2 − mgl θ 2
2
2
(2)振动微分方程
方法: d (T +U ) = 0
dt
动能 T = 1 m (lθ )2
2
( ) a: ml2θ + ka2 + mgl θ = 0
b: ml2θ + ka2θ = 0
( ) c: ml2θ + ka2 − mgl θ = 0
2.7 一只用于流体力学试验室的压力表,具有均匀内径,截面积为 A。内装一长 度为 L、密度为ρ的水银柱,如图所示。求液面在其平衡位置附近振动的频率。 忽略水银与管壁间的摩擦。
ρl
+
m
⎞ ⎟⎠
y
2
=
1 2
⎛ ⎜⎝
17 35
M
+
m
⎞ ⎟⎠
y 2
Te
=
1 2
me y 2
可得: me
=
17 35
M
+
m
中央集中受力简支梁的刚度为:
k
=
48EJ l3
则系统的固有频率为:
f= 1 k 2π me
2.6 若以平衡位置为坐标原点,且令该位置的势能为零,则如图所示各系统中质
量离开静平衡位置的角度为θ 时的总势能为多少?并写出各自的振动方程。
解:在离心力作用下系统达到平衡时有:
kΔx = mω2 (l0 + Δx)
以新平衡位置作为坐标原点,则有
mx+ k(x + Δx) − mω2 (l0 + Δx + x) = 0 整理得: mx + kx − mω 2 x = 0
⎠
又
Te
=
1 2
me x2
故
me
=
m1a12 + m2a42 a42
f
=
1 2π
ke = 1 me 2π
k1a22 + k2a32 m1a12 + m2a42
2.2 图示振动系统的弹性元件的质量忽略不计。求系统的等效刚度( k1, k3 为悬臂 弹簧的刚度)。
解:
k1 、 k2 串联
keq1
=
k1k2 k1 + k2
1 2
k2
⎛ ⎜ ⎝
a3 a4
⎞2 x⎟
⎠
=
1⎛
2
⎜ ⎝
k1a22 + k2a32 a42
⎞ ⎟
x
2
,
⎠
又
Ue
=
1 2
ke x2
故
ke
=
k1a22 + k2a32 a42
Ta
=
1 2
m1
⎛ ⎜ ⎝
a1 a4
x
⎞2 ⎟
⎠
+
1 2m2x2=1⎛
2
⎜ ⎝
m1a12 + m2a42 a42
⎞ ⎟
x
2
,
解: 设 y 为中点动挠度,即简支梁中点自由振动的位移,梁在自由振动过程中离端
点距离为 ξ
的截面在垂直方向的位移为
y
3l2ξ − l3
4ξ
3
,则速度为
y
3l2ξ − l3
4ξ
3
。
∫ Ta
=
2
l 2 0
1ρ 2
⎛ ⎜ ⎝
y
3l
2ξ
− l3
4ξ
3
⎞2 ⎟ ⎠
dξ
+
1 my 2 2
=
1 2
⎛ ⎜⎝
17 35
⎤⎦ 2
=
k
(r
+
a)2 θ 2
d t
(U a
+
Ta
)
=
0
可得: θ +
4k (r + a)2
3mr 2
θ
=
0
于是: f = 1 2π
4k (r + a)2 = 1 r + a
3mr 2
2π r
4k 3m
2.9 两个滑块在光滑的机体槽内滑动,机体在水平面内绕固定轴 o 以角速度ω转 动。每个滑块质量为 m,各用弹簧常数为 k 的弹簧支承。试确定其固有频率。
F
x1
=
(a
b
+ b) k1
F;
x2
=
(a
a
+ b) k2
F
②几何分析
x − x1 = a x2 − x1 a + b 于是
x
−
(a
b
+ b) k1
F
=
⎛ ⎜⎜⎝
(a
a
+ b) k2
F
−
(a
b
+ b) k1
F
⎞ ⎟⎟⎠
a
a +b
=
a2k1 − abk2
(a + b)2 k1k2
F
变换得:
x
=
a2k1 + b2k2
解: 振动微分方程为: LAρx+ 2Aρ gx = 0
系统固有圆频率为 ω0 = 2g L 系统固有频率为 f = 1 2g L
2π
2.8 确定图示系统的固有频率。圆盘质量为 m。
ka
k
r
O
x
解:
Ta
=
1 2
mx 2
+
1 2
Jθ2
=
3 4
mr 2θ2
Ua
=
2×
1 2
k
⎡⎣( r
+
a)θ
keq1 、 k3 并联 keq2 = keq1 + k3
keq2 、 k4 串联
keq
=
keq 2 k4 keq2 + k4
( ( )( ) ) keq
=
keq 2 k4 keq2 + k4
=
k1k2 k1k2 +
+ k2k3 + k3k1 k4 k1 + k2 k3 + k4
2.3 图示振动系统中,弹性元件以及滑轮的质量忽略不计。假定滑轮转动时无摩 擦作用,求系统的等效刚度。
2.1 如图所示系统中,已知 m1, m2 , k1, k2 , a1, a2 , a3, a4 , 水平刚杆的质量忽略不计。以 m2 的线位移为运动坐标,求系统的等效刚度 ke ,等效质量 me 以及固有频率。
解:设 m2 的线位移为 x,由能量法
Ua
=
1 2
⎛ k1 ⎜
⎝
a2 a4
⎞2 x⎟
⎠
+
解:设滑轮中心位移分别为 x1、x2,由滑轮系运动分析可知:
x = 2( x1 + x2 )
(1)
设绳中张力为 T0,则
2T0 = k1x1 = k2 x2
(2)
由(1)和(2)可得:
x1
=
k1
2(k1 +
k2
)
x
x2
=
k2
2(k1 +
k2
)
x
由能量法
Ua
=
1 2
k1x12
+
1 2
k2 x22
=
1 2