ARM的串行口驱动程序设计
实验2(串行端口程序设计实验)
实验2:串行端口程序设计一、实验目的了解在linux环境下串行程序设计的基本方法。
掌握终端的主要属性及设置方法,熟悉终端I /O函数的使用。
学习使用多线程来完成串口的收发处理。
二、实验内容读懂程序源代码,学习终端I /O函数的使用方法,学习将多线程编程应用到串口的接收和发送程序设计中。
三、预备知识有C语言基础。
掌握在Linux下常用编辑器的使用。
掌握Makefile 的编写和使用。
掌握Linux下的程序编译与交叉编译过程四、实验设备及工具硬件:UP-NETARM2410-S嵌入式实验平台、PC机Pentium 500以上, 硬盘10G以上。
软件:PC机操作系统REDHAT LINUX 9.0+MINICOM+ARM-LINUX开发环境五、实验原理异步串行I /O方式是将传输数据的每个字符一位接一位(例如先低位、后高位)地传送。
数据的各不同位可以分时使用同一传输通道,因此串行I/O可以减少信号连线,最少用一对线即可进行。
接收方对于同一根线上一连串的数字信号,首先要分割成位,再按位组成字符。
为了恢复发送的信息,双方必须协调工作。
在微型计算机中大量使用异步串行I/O方式,双方使用各自的时钟信号,而且允许时钟频率有一定误差,因此实现较容易。
但是由于每个字符都要独立确定起始和结束(即每个字符都要重新同步),字符和字符间还可能有长度不定的空闲时间,因此效率较低。
图2.3.1串行通信字符格式图2.3.1给出异步串行通信中一个字符的传送格式。
开始前,线路处于空闲状态,送出连续“1”。
传送开始时首先发一个“0”作为起始位,然后出现在通信线上的是字符的二进制编码数据。
每个字符的数据位长可以约定为5位、6位、7位或8位,一般采用ASCII编码。
后面是奇偶校验位,根据约定,用奇偶校验位将所传字符中为“1”的位数凑成奇数个或偶数个。
也可以约定不要奇偶校验,这样就取消奇偶校验位。
最后是表示停止位的“1”信号,这个停止位可以约定持续1位、1.5位或2位的时间宽度。
基于ARMLinux下IIC设备驱动程序设计与实现
具有免费 、 开放源代 、 强大的 网络功 能等特点 , 在嵌入式产 品中 正在得 到广泛 的应 用。本文主要研 究 A MLnx系 统 I R i u I 备 C设 驱动程序 的设计方法 。
多个从 机 , 每个从机都有一个 唯一 的地址 。 主机负 责 I I C总线 的初始化 、 数据传 输 、 产生 时钟信 号等工 作 。I I c总线传 输 的时序 是 : S A T( 从 T R 开始 位 ) 开始 传输 , SO ( T P 结束位 ) 结束传输。传送 到 S A上 的每一个字 节必须是 D 8位 , 每次传送 的字节数不限 , 一个字节后面 必须 跟一个应答 每 位 。如果在传输过程 中, 从设备不能一次接收完一个 字节 , 此时 它就会使时钟置为低 电平 , 迫使主设备等待 ; 当从设备能接收下
包 括 oe ( 、 a( 、re ) i t ) r es( 等 等 。 pn ) r d ) wi ( 、 c ( 和 e ae ) e t ol l O e ( 函数 的 主 要 功 能是 提 供 给 驱 动 程 序 初 始化 能 力 , pn ) 为
个数据字节后 , 将释 放 S L线 , C 继续 后面 的数据 传输 。数 据
£0 )0口 [ l 0口 厂 = Ⅺ l
kv b o
…
…
传输的时序如图 1 所示 。
s ^ 。
.
维普资讯
第2 5卷第 3期
20 0 8年 3月
计 算机 应 用与软件
C mp tr A p iai n n ot a e o u e p l t sa d S f r c o w
V 12 . o . 5 No 3
Ma . 0 8 r2 0
基于ARM-Linux的MAX1303接口与驱动程序设计

基于ARM-Linux的MAX1303接口与驱动程序设计杨斌;满峰;姜秀杰;刘波【摘要】针对数据采集与处理系统的应用需求,设计了嵌入Linux的ARM9处理器LPC3250与16位AD采样芯片MAX1303的硬件接口和驱动程序.首先,描述了LPC3250和MAX1303的性能、特点以及硬件接口电路设计方案.然后,在硬件平台的基础上,详细地阐述了嵌入式Linux下MAX1303驱动程序的组成模块和具体实现方法,并给出了部分源代码以及对设备驱动的测试方法.测试结果表明,系统工作正常、稳定,采样结果正确,具有实际工程应用价值.%Aiming at the application requirement of data acquisition and processing system,the paper designs driver of MAX1303 based on embedded Linux and hardware interface circuit between LPC3250 and MAX1303.Firsdy,performance characteristics of both chips and scheme of hardware interface areintroduced.Secondly,on the bases of hardware platform,the composition and implemented method of MAX1303's driver under embedded Linux are elaborated in detail.Meanwhile,part of the source code and test methods of driver is given.The test results reveal that the system operations stably and has practical value.【期刊名称】《电子设计工程》【年(卷),期】2013(021)012【总页数】4页(P173-176)【关键词】LPC3250;MAX1303;SPI;嵌入式Linux;设备驱动【作者】杨斌;满峰;姜秀杰;刘波【作者单位】中国科学院空间科学与应用研究中心,北京100190;中国科学院研究生院,北京100049;中国科学院空间科学与应用研究中心,北京100190;中国科学院空间科学与应用研究中心,北京100190;中国科学院空间科学与应用研究中心,北京100190【正文语种】中文【中图分类】TH274在数据采集系统中,通常是通过传感器将自然世界的物理量转化成电量,电量是模拟量,必须经过模/数转换才能被系统的处理器读取。
ARM简介及编程

ARM简介及编程1.ARM简介(摘录) ARM(Advanced RISC Machines)是微处理器行业的一家知名企业,设计了大量高性能、廉价、耗能低的RISC处理器、相关技术及软件。
技术具有性能高、成本低和能耗省的特点。
适用于多种领域,比如嵌入控制、消费/教育类多媒体、DSP和移动式应用等。
ARM将其技术授权给世界上许多著名的半导体、软件和OEM厂商,每个厂商得到的都是一套独一无二的ARM相关技术及服务。
利用这种合伙关系,ARM很快成为许多全球性RISC标准的缔造者。
目前,总共有30家半导体公司与ARM签订了硬件技术使用许可协议,其中包括Intel、IBM、LG半导体、NEC、SONY、菲利浦和国民半导体这样的大公司。
至于软件系统的合伙人,则包括微软、升阳和MRI等一系列知名公司。
ARM架构是面向低预算市场设计的第一款RISC微处理器。
2.产品介绍ARM提供一系列内核、体系扩展、微处理器和系统芯片方案。
由于所有产品均采用一个通用的软件体系,所以相同的软件可在所有产品中运行(理论上如此)。
典型的产品如下。
①CPU内核--ARM7:小型、快速、低能耗、集成式RISC内核,用于移动通信。
-- ARM7TDMI(Thumb):这是公司授权用户最多的一项产品,将ARM7指令集同Thumb 扩展组合在一起,以减少内存容量和系统成本。
同时,它还利用嵌入式ICE调试技术来简化系统设计,并用一个DSP增强扩展来改进性能。
该产品的典型用途是数字蜂窝电话和硬盘驱动器。
--ARM9TDMI:采用5阶段管道化ARM9内核,同时配备Thumb扩展、调试和Harvard 总线。
在生产工艺相同的情况下,性能可达ARM7TDMI的两倍之多。
常用于连网和顶置盒。
②体系扩展-- Thumb:以16位系统的成本,提供32位RISC性能,特别注意的是它所需的内存容量非常小。
③嵌入式ICE调试由于集成了类似于ICE的CPU内核调试技术,所以原型设计和系统芯片的调试得到了极大的简化。
一种基于ARM & Windows CE测控仪器的开发模式
一
种 基 于 AR &Wid w E测控 M no s C 仪 器 的 开 发模 式
武 博 黄惟公
( 西华大学机械工程与 自动化学院, 成都 6 03 ) 109
摘 要 针对传统的仪表, 提出了一种以Wi o s E操作系统和 A M硬件为开发平台, 位机为主要接口 n w d C R 8 控制的开发模式。该模式利用 8 位机的A 计数等接V, D、 I 通过串行V完成二者之间的通信。文中详细介绍了开发 I
本文 提 出 了 以 Wi o sC n w E嵌 入 式操 作 系统 和 d
l坦 塑 f 墼廛堡
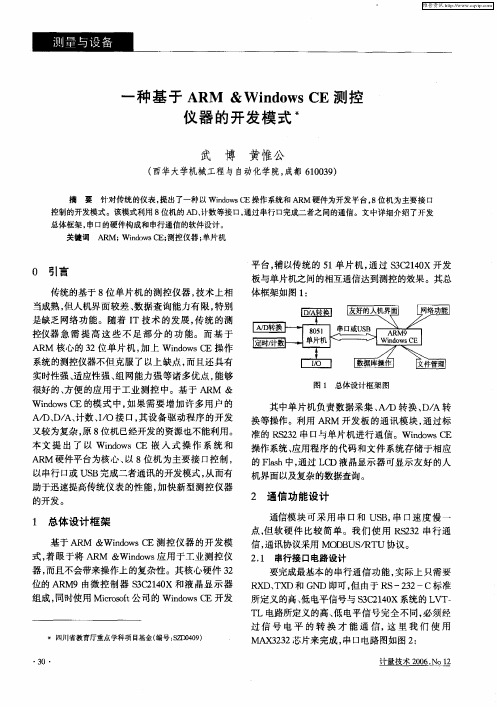
图 1 总体设计框架图
其中单片机负责数据采集 、 / A D转换 、 / D A转 换等操作。利用 A M 开发板的通讯模块 , R 通过标
准的 R 22串 口与单片机进行通信。Wi o s E S3 n w d C 操作系统、 应用程序的代码和文件系统存储 于相应
线的图形界面。其 中, 单片机采用 81 1光断管与 0 5; 2
2 2 串行通 讯程序 设 计 .
Wi o s E提供 了丰富的通信支持。其应 用 n w d C
程序和 串行端 口的沟通主要通过串行装置驱动程序
完成 。
T 1口相连, 记录光断管被遮断 的次数; 使用“ 一线”
总体框架 , 口的硬件构成和串行通信的软件设计 。 串 关键词 A M; no s E 测控仪器 ; 片机 R Wi w ; d C 单
0 引言
传统的基于 8 位单片机的测控仪器 , 技术上相 当成熟 , 但人机界面较差 、 数据查询能力有 限, 特别 是缺乏网络功 能。随着 I T技术 的发展 , 传统 的测 控仪器 急 需 提 高这 些 不 足 部分 的功 能。而 基 于
基于ARM9和嵌入式Linux的串口驱动开发
2 ¥ C 4 0 片串 口的控制 3 21 芯
¥C 40提供 了三个通用异步 串行通信 接 口, 3 21
第一作 者简介 : 杰恒 ( 92 , , 耿 1 8 一) 男 河北邢 台人 , 士研究 生 , 硕 研
究方 向: 检测技术与 自动化装置。Em i g v0 @16 cm - a : hO 1 2 .o 。 li
3 串 口驱动设 计及应用实例
下 面通 过 一 个 设 计 实 例 来 详 细 分 析 串 口驱 动 的设 计 方 法 。某 设 备 通 过 串 口实 现 对 下 位 机 的 控
( ) L O n寄 存 器 : 1U C N 主要 用 来 设 置 串 口工 作 模 式 , 括数 据位 长 度 、 止 位 个 数 , 包 停 以及 数 据 校 验
/ 文件系统人 口定义 /
sr c i o e a o sua t f s= l tu tf e p r t n r o l i p
_ _
● ●
● ●
●
●
}
/ 编写人 口函数 , / 实现设备控制
sa i n a t oe (t c i d ttc i tu r p n sut n e}ioe s ut i } i) r o nd , t c fe fp { r l l
维普资讯
第 8卷
第3 期
20 08年 2月
科
学
技
术
与
工
程
@
V0. No 3 18 . F b o 8 e .2 o
17 -89 2 0 )-7 6 0 6 1 11 (0 8 30 8 -4
S in e T c n lg n n i e r g ce c e h oo y a d E gn e i n
基于ARM9的嵌入式串口——网络接口转换卡的设计

‘
Ha d s a t x t r t r mi O
( 数据 包接 收)
・・- ・ , 设各驱动 动能层
3. 件 设 计 软
31串 口驱 动设 计 . 串 口在 嵌 入 式 系统 当 中是 很 重 要 的 数 据 通 信 接 1 , 数 据 从 C U 5 1 P 经过 串 口端 口发 送 出去 时 , 节 数 据 转 换 为 串 行 的 位 , 接 收 数 据 时 . 字 在
21串 行 口设 计 .
urs ut nd io e s ut l ie att c ioe n d ,t c fe l) (r r f i
f 口释 放 数 据 串
o d e e cu t r o d c us o n ;
rt r : e u n O
A M 的 U RT单 元 提供 独 立 的 异 步 串 行 I 端 口 , 个 都 可 以在 R A / O 每 中断和 D MA 两 种模 式 下 工 作 。支 持 的最 高 波 特 率 为 15 0 b s每 个 12 0 D 。 U R A T通 道 包 括 2 1 个 6位 FF 分 别 用 于接 收 和发 送 数 据 . 统 中采 IO, 系
}
i tc e n p n la u
_
mouevi) d l( d o
用 RS 2 2的 电平 转 换 芯 片 实 现 串 口 的通 信 .F MO -3 T  ̄C S输 入 输 出信 号 与 AR 的 U T输 入 / 出 口对 接 。 M AR 输
串口 U R A T模 块 如 图 1 1所 示 —
— _
f 始 化模 块 自身 初
基本串口通信程序设计

基本串口通信程序设计串口通信是指通过串行接口进行数据传输的一种通信方式。
串口通信通常用于短距离的数据传输,具有稳定性强、传输速率低的特点。
本文将介绍串口通信的基本原理和程序设计。
一、串口通信基本原理串口通信是通过串行接口将数据一位一位地传输的通信方式。
串口通信的基本原理是使用两根信号线进行通信:一根是传输数据的信号线(TX),负责向外发送数据;另一根是接收数据的信号线(RX),负责接收外部发送过来的数据。
二、串口通信程序设计步骤1. 打开串口:首先需要通过操作系统提供的串口接口函数,打开需要使用的串口。
在Windows系统中,可以使用CreateFile函数打开串口;在Linux系统中,可以使用open函数打开串口。
3. 发送数据:使用WriteFile函数(Windows系统)或write函数(Linux系统),向串口发送需要传输的数据。
4. 接收数据:使用ReadFile函数(Windows系统)或read函数(Linux系统),从串口接收数据。
5. 关闭串口:数据传输完成后,需要关闭串口,使用CloseHandle函数(Windows系统)或close函数(Linux系统)即可关闭串口。
三、串口通信程序设计示例(Windows系统)下面是一个简单的串口通信程序设计示例,实现了从串口接收数据并将接收的数据原样返回的功能。
#include <iostream>#include <windows.h>int mainHANDLE hSerial;DCB dcbSerialParams = {0}; // 串口参数hSerial = CreateFile("COM1", GENERIC_READ , GENERIC_WRITE, 0, NULL, OPEN_EXISTING, FILE_ATTRIBUTE_NORMAL, NULL); // 打开串口dcbSerialParams.DCBlength = sizeof(dcbSerialParams);std::cout << "Error getting serial port state\n";return 1;}dcbSerialParams.BaudRate = CBR_9600;dcbSerialParams.ByteSize = 8;dcbSerialParams.StopBits = ONESTOPBIT;dcbSerialParams.Parity = NOPARITY;std::cout << "Error setting serial port state\n";return 1;}return 1;}char buffer[100];DWORD bytesRead;while (1)if (ReadFile(hSerial, buffer, sizeof(buffer), &bytesRead, NULL) && bytesRead > 0)std::cout << "Received data: " << buffer << std::endl;DWORD bytesWritten;if (!WriteFile(hSerial, buffer, bytesRead, &bytesWritten, NULL))std::cout << "Error writing to serial port\n";return 1;}}}CloseHandle(hSerial); // 关闭串口return 0;以上程序打开串口COM1,设置波特率为9600,数据位为8位,停止位为1位。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2
嵌入式系统学习方向
嵌入式硬件平台-硬件电路PCB设计 嵌入式协处理器-FPGA/DSP 嵌入式CPU开发-ARM/MIPS/PowerPC/X86 嵌入式OS-uC/OS/Linux/WinCE/VxWorks/Symbian 嵌入式应用开发-bootloader/文件系统/数据库系统/图形系统 软 件 开 发 嵌入式系统开发-系统功能调用/进线程高级编程 /客户端/服务器端编程 /socket网络高级编程/web服务器编程 嵌入式驱动开发 嵌入式手机开发-智能手机图形界面/通讯模块/GPS开发
18
基于ARM7TDMI结构的应用程序源码
#include"..\ucos-ii\includes.h" /* uC/OS interface */ ///******************任务定义***************/// OS_STK Main_Stack[STACKSIZE*8]={0, }; void Main_Task(void *Id); #define Main_Task_Prio 12 /**************已经定义的OS任务************* #define SYS_Task_prio 1 //系统任务 #define Touch_Screen_Task_Prio 9 //触摸屏任务 #define Key_Scan_Task_Prio 58 //键盘扫描任务 #define Lcd_Fresh_prio 59 //液晶屏刷新任务 *******************************************/ OS_EVENT *Nand_Rw_Sem; //Nand_Flash读写控制权旗语 OS_EVENT *Uart_Rw_Sem; //Uart读写控制权旗语 void initOSGUI() //初始化操作系统的图形界面 { initOSMessage(); initOSList(); initOSDC(); initOSCtrl(); initOSFile(); }
19
int Main(int argc, char **argv) { ARMTargetInit(); // 开发板初始化 OSInit(); // uC/OS-II 初始化 uHALr_ResetMMU(); //初始化内存管理单元 LCD_Init(); //初始化LCD模块 LCD_printf("LCD initialization is OK\n"); LCD_printf("320 x 240 Text Mode\n"); LoadFont(); //调用字库 LoadConfigSys(); //调用系统配置文件 LCD_printf("Create task on uCOS-II...\n"); OSTaskCreate(Main_Task, (void *)0, (OS_STK *)&Main_Stack[STACKSIZE*81], Main_Task_Prio);// 创建Main_Task任务 OSAddTask_Init(); //创建系统附件任务 LCD_printf("Starting uCOS-II...\n"); LCD_printf("Entering graph mode...\n"); LCD_ChangeMode(DspGraMode); initOSGUI(); //初始化图形界面 InitRtc(); //初始化时钟 Nand_Rw_Sem=OSSemCreate(1); //创建Nand-Flash读写控制权旗语,初值 //为1满足互斥条件 OSStart(); // 启动多任务调度 return 0; //程序不会执行到这里 }
USB.h Flash.h 驱动 程序 Keyboard16.h Rtc.h drv.hLCD240.h
LCD刷新 系统任务
硬 件
LCD
USB
键盘
海量 存储器
时钟 日历
信号量
邮箱
消息 队列
任务调 度模块
动态内 存管理的RTOS内核
基于uCOS-II
8
典型嵌入式系统基本组成-硬件
外围电路 微处理器
时钟 RAM
23
第一章 ARM的串行口驱动程序设计 1、了解ARM的串行口通讯工作原理 2、 掌握ARM串行口的寄存器操作 3、编程实现ARM UART (Universal Asynchronous Receiver and Transmitter)通讯
24
串行通信概述
串行数据传送模式:
单工 半双工 全双工
嵌入式组件设计
总学时32课时,16课时上课,16课时实验
•考查课考核
•内容
ARM的串行口驱动程序设计 键盘驱动程序设计 I/O驱动程序设计 ARM的A/D接口驱动程序设计 LCD的驱动程序设计 触摸屏驱动程序设计
第1章 平时考勤(20分) 第2章 实验(30分) 第3章 1、平时实验(20分) 第4章 第5章 2、实验报告(10分) 第6章
21
USB下载 超级终端
ARM SDT
22
在uC/OS-II系统上运行的应用程序的结构
操作系统启动过程:
嵌入式控制器 硬件初始化 操作系统 初始化 LCD初始化 启动多任务 调度 初始化用户界面、 时钟、网络 创建任务 调用系统配 置文件 主任务 用户程序 任 务 1
…
任 务 n
装载字库
消息处理
串行通信方式:
异步通信 同步通信
异步通信必须遵循的3项规定为: 1、字符的格式 2、波特率 3、校验位 初始化:设置波特率、停止位、奇偶校验、数据位等参数 设置是否启用中断方式,包括接收数据中断和发送数据中断
25
ARM如何实现串口功能
1. 熟悉串口通讯原理 2. 查阅ARM串口寄存器文档(um_s3c44box.pdf第10章, 包括控制、状态和数据寄存器) 3. 4. 5. 查阅电平转换芯片资料(max3232) 设计硬件电路图 设计串口驱动(包括串口寄存器初始化,发送接收函数等)
ARM300开发板资源: 核心板资源 CPU,FLASH,SDRAM 键盘模块 LCD & 触摸屏 LED & 数码管 AD接口 总线接口:USB、串口、网口
15
开发平台简介
集成开发环境运行平台
扩展板接口 扩展口2 网 卡
网口
ARM微处理 器 S3C44B0X
JTAG
JTAG仿真器
USB 串口0
ARM300开发板
16
嵌入式开发工具与开发环境
17
例1、ARM SDT 2.5开发环境及开发基本的嵌入式应用程序
编写一段程序,在屏幕上和终端上显示“Hello world”。
设计一个只有一个任务MyTask的应用程序,其每秒显示一个“M”。
void MyTask (void *pdata) #include "includes.h" {#if OS_CRITICAL_METHOD == 3 #define TASK_STK_SIZE 512 OS_CPU_SR cpu_sr; OS_STK TaskStartStk[TASK_STK_SIZE]; #endif pdata = pdata; INT16S key; OS_ENTER_CRITICAL(); INT8U x=0,y=0; PC_VectSet(0x08, OSTickISR); PC_SetTickRate(OS_TICKS_PER_SEC); void MyTask(void *pdata); OS_EXIT_CRITICAL(); /**********主函数***********/ OSStatInit(); void main (void) for (;;) { if (x>10) { char* s_M="M"; { x=0; y+=2; } OSInit(); PC_DispChar(x, y,*(char*)pdata, PC_DOSSaveReturn();//保存DOS环境 DISP_BGND_BLACK+DISP_FGND_WHITE ); x += 1; PC_VectSet(uCOS, OSCtxSw); if (PC_GetKey(&key) == TRUE) OSTaskCreate(MyTask, s_M, { if (key == 0x1B) { PC_DOSReturn(); } &TaskStartStk[TASK_STK_SIZE - 1],0); } OSStart(); OSTimeDlyHMSM(0, 0, 1, 0); } } }
6
驱动程序抽象层
操作系统只和特定的驱动抽象层通讯,无论在抽 象层下面对应的是什么类型的设备,对操作系统 和用户的应用程序来说都是统一的接口。 通过使用C语言的指针函数的方法,实现了驱动抽 象层的软件设计。通过指向不同驱动子程序的函 数指针,为同一操作系统挂载了多种驱动程序。
7
基于μCOS-II扩展RTOS的体系结构
电源 模块
Flash
MPU
复位 ROM
外设
USB LCD Keyboard Other
9
嵌入式系统的软/硬件框架
功能层 文件系统
应用程序 图形用户 接口 任务管理
软件层
实时操作系统(RTOS) 中间层 BSP/HAL 硬件抽象层/板极支持包 D/A 硬件层 A/D I/O 人机交互接口 嵌入式计算机系统 嵌入式 微处理器 通用接口 ROM SDRAM
20
void Main_Task(void *Id) { LCD_ChangeMode(DspTxtMode); LCD_Cls(); LCD_printf("Hello world!\n"); Uart_Printf("Hello world!\n"); for(;;) OSTimeDly(200); }