非线性规划的应用范例
非线性规划例题
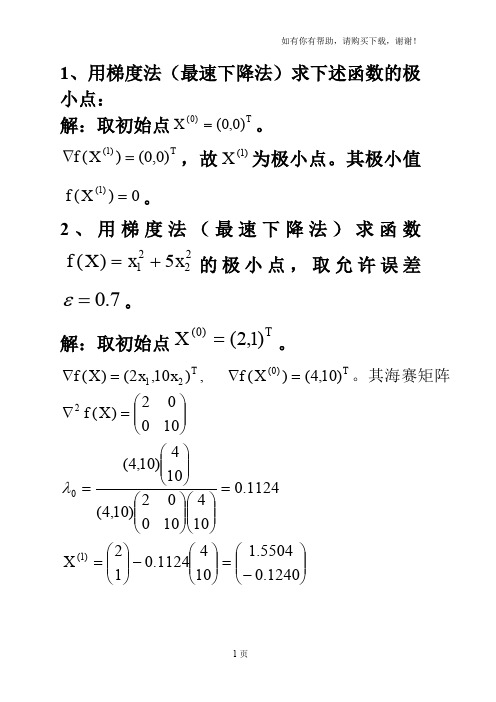
1、用梯度法(最速下降法)求下述函数的极小点:解:取初始点T X )0,0()0(=。
TXf )0,0()()1(=∇,故)1(X 为极小点。
其极小值0)()1(=X f 。
2、用梯度法(最速下降法)求函数22215)(x x X f +=的极小点,取允许误差7.0=ε。
解:取初始点TX)1,2()0(=。
⎪⎪⎭⎫ ⎝⎛-=⎪⎪⎭⎫ ⎝⎛-⎪⎪⎭⎫ ⎝⎛==⎪⎪⎭⎫ ⎝⎛⎪⎪⎭⎫ ⎝⎛⎪⎪⎭⎫ ⎝⎛=⎪⎪⎭⎫⎝⎛=∇=∇=∇1240.05504.11041124.0121124.010410002)10,4(104)10,4(10002)()10,4()(,)10,2()()1(02)0(21XX f X f x x X f T T λ。
其海赛矩阵ε>=∇⎪⎪⎭⎫ ⎝⎛-=∇1526.11)(,2400.11008.3)(2)1()1(Xf Xf ελελελ<=∇⎪⎪⎭⎫ ⎝⎛=∇⎪⎪⎭⎫⎝⎛=⎪⎪⎭⎫ ⎝⎛--⎪⎪⎭⎫ ⎝⎛-==⎪⎪⎭⎫ ⎝⎛-⎪⎪⎭⎫ ⎝⎛-⎪⎪⎭⎫ ⎝⎛--=>=∇⎪⎪⎭⎫ ⎝⎛-=∇⎪⎪⎭⎫⎝⎛-=⎪⎪⎭⎫ ⎝⎛-⎪⎪⎭⎫ ⎝⎛==⎪⎪⎭⎫ ⎝⎛⎪⎪⎭⎫ ⎝⎛⎪⎪⎭⎫ ⎝⎛=>=∇⎪⎪⎭⎫ ⎝⎛=∇⎪⎪⎭⎫⎝⎛=⎪⎪⎭⎫ ⎝⎛--⎪⎪⎭⎫ ⎝⎛-==⎪⎪⎭⎫ ⎝⎛-⎪⎪⎭⎫ ⎝⎛-⎪⎪⎭⎫ ⎝⎛--=6685.0)(,759.0304.0)(0759.0152.03419.08542.03221.003419.04271.03221.03419.08542.010002)3419.0,8542.0(3419.08542.0)3419.0,8542.0(8466.0)(,3419.08542.0)(03419.04271.0757.2102.11124.02757.05510.01124.0757.2102.110002)757.2,102.1(757.2102.1)757.2,102.1(815.8)(,757.2102.1)(2757.05510.02400.11008.33223.01240.05504.13223.02400.11008.310002)2400.1,1008.3(2400.11008.3)2400.1,1008.3(2)4()4()4(32)3()3()3(22)2()2()2(1X f X f X X f X f X X f X f X故以TXf )0759.0,152.0()()4(=为近似极小点,此时的函数值0519.0)()4(=X f 。
非线性规划的实例与定义

非线性规划的实例与定义如果目标函数或约束条件中包含非线性函数,就称这种规划问题为非线性规划问题。
一般说来,解非线性规划要比解线性规划问题困难得多。
而且,也不象线性规划有单纯形法这一通用方法,非线性规划目前还没有适于各种问题的一般算法,各个方法都有自己特定的适用范围。
下面通过实例归纳出非线性规划数学模型的一般形式,介绍有关非线性规划的基本概念。
例1 (投资决策问题)某企业有n 个项目可供选择投资,并且至少要对其中一个项目投资。
已知该企业拥有总资金A 元,投资于第),,1(n i i =个项目需花资金i a 元,并预计可收益i b 元。
试选择最佳投资方案。
解 设投资决策变量为⎩⎨⎧=个项目决定不投资第,个项目决定投资第i i x i 0,1,n i ,,1 =, 则投资总额为∑=n i i i x a 1,投资总收益为∑=ni i i x b 1。
因为该公司至少要对一个项目投资,并且总的投资金额不能超过总资金A ,故有限制条件∑=≤<ni i i A x a 10另外,由于),,1(n i x i =只取值0或1,所以还有.,,1,0)1(n i x x i i ==-最佳投资方案应是投资额最小而总收益最大的方案,所以这个最佳投资决策问题归结为总资金以及决策变量(取0或1)的限制条件下,极大化总收益和总投资之比。
因此,其数学模型为:∑∑===ni i in i i ixa xb Q 11maxs.t. ∑=≤<ni i i A x a 10.,,1,0)1(n i x x i i ==-上面例题是在一组等式或不等式的约束下,求一个函数的最大值(或最小值)问题,其中目标函数或约束条件中至少有一个非线性函数,这类问题称之为非线性规划问题,简记为(NP )。
可概括为一般形式)(min x fq j x h j ,,1,0)(s.t. =≤ (NP)p i x g i ,,1,0)( ==其中T n x x x ][1 =称为模型(NP )的决策变量,f 称为目标函数,i g ),,1(p i =和),,1(q j h j =称为约束函数。
非线性系统的实际应用案例

非线性系统的实际应用案例非线性系统在现代科学与技术中有着广泛的应用,涉及到各个领域,如机械、自动控制、生态学、神经科学等等。
在本文中,我们将介绍一些非线性系统的实际应用案例,并力图从中探讨非线性系统的工程问题和特性。
一、喷气发动机振动分析喷气发动机是现代航空发展的主要推动力,而它的结构十分复杂,有许多非线性振动的现象。
因此,正确地分析和诊断其振动特性就显得十分必要。
以一具喷气发动机为例,德国学者L. RICHTER在其论文中分析了其在运行过程中的振动特性,结果表明该发动机的非线性动力分析对于研究其振动动态行为有明显的促进作用。
通过对喷气发动机的振动分析,不仅可以对其结构及特性进行诊断,还可以为改进设计提供更加清晰的思路。
二、生态系统的动态模拟生态学是研究生物群落及其环境相互作用的一门学科。
当生态系统变化时,非线性动力学便成为研究这种复杂性的重要工具。
在一些生态系统研究中,如重构同化指数、广义线性模型等,非线性系统模型的应用相当明显。
通过对生态系统的动态模拟,科学家不仅可以深入了解其内部机制,还可以为制定可持续的经济发展方案提供依据。
三、神经控制系统设计随着工业智能化的发展,神经控制系统应用越来越广泛。
与传统PID控制系统不同的是,神经控制系统能够模拟人的智能思维,对于建模非线性系统尤为有效。
例如,通过神经网络结构,可以模拟汽车转向、加速、制动等非线性系统,对于提升车辆性能有着积极的作用。
此外,神经控制系统还可以用于医学领域,如针灸、手术机器人等,都有着明显的非线性动力学性质。
四、机器人行走控制机器人在现代制造业中发挥着越来越重要的作用,而其行走控制则是重点问题。
由于机器人的结构变化以及外部环境干扰等因素,机器人行走控制是一个非线性系统问题。
在控制模型优化和状态预判等方面,非线性系统的方法优于传统线性方法。
例如,一个名为“空中蹦床”的机器人模型,通过非线性分析建立行走控制模型,使其在精准地控制脚部力量的同时能够更加灵活地执行任务。
非线性规划

, 为任意正 f1 ( X ) f 2 ( X )仍为 D上的凸函数,
证明
§3-2 一元函数的极小化
一.极值的充分条件和必要条件:
定理3-4 设函数 f ( X )在区间内一点X 1 处具有 k 1 阶 导数( k 2 ),且 f ( k 1) ( x0 ) 在 X 1 附近是连 续的。 如果 f
f ( X ) 函数的Hessian阵:
2 f (X ) 2 x 1 2 f (X ) x x 2 2 1 H (X ) f (X ) x x 3 1 2 f (X ) x x n 1 2 f (X ) x1x 2 2 f (X ) x 2 2 f (X ) x n x 2
直接算 f ( X )的搜索寻优法
Fibonacci数列 Fk k 0,1,2 数列由差分方程递推
F0 1, F1 1 k 0 Fk 2 Fk Fk 1
Fk 1 1 2 3 5 8 13 21 34
分数数列
设 f ( X ) 在 [a, b] 内为具有极小值的单峰函数,根据精确度 要求算出需迭代的次数 n ,于是得到数列 F0 , F1 , Fn 。
是奇数,所以 x1 3 不是
f ( X ) 的极值点,而是拐点。
函数如右图。
x
二.牛顿迭代公式
牛顿—雷夫生(Newton-Raphson)公式可将非 线性问题逐次线性化,形成牛顿迭代公式
牛顿迭代公式
xk 1
f ( xk ) xk f ( xk )
说明:这里的牛顿迭代公式是找导数为零的点。
X ,Y D
证明
不等式
恒成立
f (Y ) f ( X ) (Y X ) T f ( X ( ) 3-6)
非线性规划

全局极小 global minimum
假设f ( x )为定义在n维欧氏空间E n的某一区域R上 的n元实函数, 若存在x * R使得对所有x R都有 f ( x ) f ( x * ), 则称f ( x * )为f ( x )在R上的全局极小值, x 为f ( x )在R上的全局极小点。
f ( X 0 ) ( f ( X 0 ) f ( X 0 ) f ( X 0 ) T , , , ) x1 x 2 x n
f ( X )是 f ( X )的等值面(线)在 X 处的法线方向
梯度方向是函数值增加最快的方向,负梯度 方向是函数值减少最快的方向。
二阶可微 (second order differentiable)
(3)
图解法(Graphical Solution)
非线性规划二维问题的图解法步骤与线性规划相似,但是 作ቤተ መጻሕፍቲ ባይዱ相对比较复杂,也很难求出坐标的值。
例4
Minf ( X ) ( x1 2) 2 ( x 2 1) 2 s.t. x1 x 2 5x 2 0 x1 x 2 5 0 x1 , x 2 0
由向量内积的性质知, 必有 ▽f (X* ) = 0。
满足(3)式的点称为平稳点或驻点,在区
域内部极值点一定是平稳点,而平稳点不 一定是极值点
分析
假设下月玩具的生产量为x个
下个月的利润为: (100 0.5x)x 100x - 0.5x 2
下月原材料消耗为:x 下月需要的人工为:2x
问题的数学模型为
max z 100x 0.5x x 200 s.t.2x 350 x 0
非线性规划

日运输计划,使总的吨·公里数最小.(2)为减少总的吨·公
里数,该公司拟放弃现有的两个料场 A1, A2,重新建设两个日 存储量仍均为20吨的新料场,试为新料场选址.
d
(单位:吨)见
i
下表:
工 地
1
2
3
4
5
6
xi 1.25 8.75 0.5 5.75 3 7.25 yi 1.25 0.75 4.75 5 6.5 7.75 di 3 5 4 7 6 11
该公司现有2个存放水泥的料场:A1(5,1)和 A2 (2,7),存储
量均为20吨.料场与工地之间均有直线道路相通.(1)试制定
min f ( X ), X Rn
s.t.
gi hj
(X (X
) )
0, i 0,
1, 2, j 1, 2,
,m ,l
3.求解 (1)非线性规划问题目前还没有适合于各种问题的一般 算法,每一个算法都有各自的适用范围。 (2)非线性规划问题的最优值不一定在可行域的边界达 到。 (3)一般求得是局部最优解,但局部最优解并不一定是 全局最优解。 (4)迭代法是主要求解方法: 通常从一个初始解出发, 在可行域中沿着使得目标函数降低的方向前进到下一个 解。 (5)一般求解方法:最速下降法,罚函数法,拉格朗日 乘子法等,或者采用智能算法,如:遗传算法,模拟退火 算法,蚁群算法,神经网络等。 (6)软件求解,借助于 Lingo 和 Matlab 可以求解非线 性规划问题。
4.例 1 抛物面 z x2 y2被平面 x y z 1截成一椭
圆,求原点到这椭圆的最短距离。 该问题可以用拉格朗日乘子法求解。下面我们把问
题归结为数学规划模型,用 Lingo 软件求解。 设原点到椭圆上点(x, y, z)的距离最短,建立如下的
非线性规划

·16·第2章 非线性规划在许多实际问题中,所建立的优化模型的目标函数或约束条件(或二者)是非线性的,所以非线性规划也是运筹学中最常用的方法之一,在生产管理和过程控制中有广泛的应用。
2.1 非线性规划问题举例【例2-1】钢铁厂自备发电厂负荷的最优分配问题。
设自备发电厂有3台蒸汽透平发电机,输入燃料,内部有高炉煤气和焦炉煤气,外购的有液化石油气。
设内部煤气不足,需用外购的液化石油气。
由于机组对输入各种燃料的输出特性不同,应如何分配燃料,使自备电厂效益最好?为了确定各种燃料的分配,设y i ,i =1,2,3为各机组的有效电力(MW ),x 1i ,i =1,2,3为各机组输入高炉煤气;x 2i ,i =1,2,3为各机组输入焦炉煤气;x 3i ,i =1,2,3为各机组输入液化石油气。
设电力单价为e c ,液化石油气单价为l c ,则可写出如下模型NP :目标函数 max f(x )=e c (1y +2y +3y )-l c (31x +32x +33x ) 约束条件1)高炉煤气使用量上限B F11x +12x +13x ≤B F2)焦炉煤气使用量上限C F21x +22x +32x ≤C F3)各机组电力上、下限max ,i y 和min ,i ymax ,i y ≤i y ≤min ,i y i =1,2,3其中各机组电力与输入燃料关系如下:i y =a 0i +a 1i 2i p +a 2i i p +a 3i F s i i =1,2,3式中 a ——系数;si F ——抽气流量(t/h);i p ——中间变量。
且 i p =i b 1b q i x 1+i b 2c q i x 2+i b 3l q i x 3式中b 为系数,q 为各燃料热值(103Kcal/Nm 3)。
这一数学模型的约束是线性的,而目标函数是非线性的,构成一个非线性规划问题。
第2章 非线性规划·17·2.2 基础知识非线性规划问题的一般形式是(NP ) min f (x 1,x 2,…,x n )(2-1a ) s.t. i g (1x ,2x ,…n x ) ≤0,i =1,2,…,m (2-1b )j h (1x ,2x ,…n x )≤0,i =1,2,…,s(2-1c ) 写成向量形式,为 (NP ) min ()f x(2-2a ) s.t. i g (x )≤0,i =1,2,…,m(2-2b )j h (x )≤0,i =1,2,…,s(2-2c )定义2-1(全局最优解) 一个定义在X ∈x 上的函数()f x ,如果对X ∈x 的每一点 都有f (x ) ≥f (xˆ) 则称ˆx为全局极小解,ˆ()f x 为全局极小值。
chapter 6 非线性规划
– 3. 函数的凸性的判别 – 定理6.1(一阶条件) 设R是n维欧式空间上的开凸
集,f(X)在R上具有一阶连续偏导数,则f(X)为R上 的凸函数的充分必要条件是,对于任意两个不同点 X(1)∈R和X(2)∈R,恒有
– 此外,若将上述关于凸函数定义中两个不等式中 的不等号改为“≥”和“>”,则分别称f(X)为凸集R 上的凹函数和严格凹函数。
– 2. 凸函数的性质
(1)若f(X)为凸函数,则-f(X)必为凹函数,反之亦 然;
(2)若f(X)为凸集R上的凸函数,则对于任意非负实 数α,函数αf(X)亦为凸集R上的凸函数;
chapter 6 非线性规划
chapter 6 非线性规划
概述
一、问题提出
– 生产管理中很多问题的运行过程都是以非线性形式运 行的,如生产成本往往是生产量的非线性函数,产品 的需求量是其价格的非线性函数等等。这样,我们在 建立一个决策问题的数学模型时,目标函数或者约束 条件常常会出现非线性形式。
f ( X (2) ) f ( X (1) ) f ( X (1) )T ( X (2) X (1) )
定理6.2(二阶条件) 设R是n维欧式空间上的某一 开凸集,f(X)在R上具有二阶连续偏导数,则f(X)为 R上的凸函数的充分必要条件是:f(X)的海森矩阵 H(X)在R上处处半正定。
– 6. 全局最优解——对于非线性规划min f = f(X),gi(X) ≥ 0 (i = 1,2,…,l;),设X0∈R,对于任何X∈R均有f(X0) ≤ f(X), 则称X0为非线性规划问题在R上的一个全局最优解。若
X0≠X时,f(X0) < f(X)严格成立,称X0为严格全局最优解。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
非線性規劃 Nonlinear Programming
作業研究 二版 2009
© 廖慶榮
章節大綱
1. 2. 3. 4. 5. 6. 7. 8. 前言 非線性規劃的應用 極大值與極小值 凸函數與凹函數 非線性規劃的類別 單變數無限制式最佳化 多變數無限制式最佳化 限制式最佳化的KKT條件
p.2/44
2 2
2
f (x) x 2 x1
f (x) x n x1
2
f (x) xnx2
2
f (x) x1 x n 2 f (x) x2xn 2 f (x) 2 xn
2
此為對稱的(symmetric)矩陣
p.12/44
作業研究 二版 Ch.12 非線性規劃
多變數
判斷關鍵點是極小值、極大值或鞍點
利用該點的赫斯矩陣(Hessian matrix):
H (x) f (x) x1
2 2 2
f (x) x1 x 2 f (x) x2
定理 12.2:讓 x 是函數
d
2
f (x)
的關鍵點。若
f (x )
2
dx
0
則 x 是極小點。若
d
2
f (x )
2
dx
0
則 x 是極大點 若 d 2 f ( x ) / dx 2 點或鞍點。
0
,則無法判斷 x 是極小點、極大
p.9/44
作業研究 二版 Ch.12 非線性規劃
範例12.6
3 3
i 1 j 1
σ ij x i x
j
xV x (x 1 x
2
4 0 .2 x 3 ) 3 .8 8 .6
2
3 .8 1 .2 6 .8
8 .6 6 .8 ( x 1 x 1 6 .5
2
x 3)
NLP模式: M in
s .t .
f ( x ) 4 0 .2 x 1 2 3 .8 x 1 x
p.3/44
作業研究 二版 Ch.12 非線性規劃
12.2 非線性規劃的應用
範例12.1
a) 銷售量與單位售價、單位成本的關係 b) 銷售量與利潤的關係
p( x)
c(x)
利 潤 ( p ( x ) c ( x )) x
x (a )
(b )
x
p.4/44
作業研究 二版 Ch.12 非線性規劃
p.13/44
作業研究 二版 Ch.12 非線性規劃
NLP模式:
M a x Z 45 x 55 xy s .t. 7 0 x 5 0 y 8 0 0 x, y 0
p.5/44
作業研究 二版 Ch.12 非線性規劃
範例12.4
問題
/倉儲中心位置問題
分店
i
倉儲中心應設在何處 (x-y座標),才能使 由倉儲中心至各分店 的總來回距離最短?
範例12.3
問題
/變動人力問題
每輛貨車由1位司機和1~3位搬運工組成搬運小組 每小組每年賺 100+55(y-1) 萬元(y=搬運工人數) 公司每年支付每位司機70萬元、每位搬運工50萬元, 公司每年有800萬的人力費用預算 該搬家公司應聘僱幾位司機以及幾位搬運工,才能 獲得最大的利潤?
f (x)
x1
x2
x3
x4
x5
x
p.11/44
作業研究 二版 Ch.12 非線性規劃
多變數
定理 12.3: x 是函數 率向量 f
(x) f (x)
的關鍵點,若且唯若其斜
為零,即
f (x) x1 f (x) x2 f (x) 0 f (x) xn
考慮以下函數:
f (x) 2 x 3x 1
2
其關鍵點 x 可計算如下:
df (x) dx 4x 3 x 3 4
因
d
2
f (x )
2
dx
4 0
所以 x
3/4
是極小點(或稱極小值)
p.10/44
作業研究 二版 Ch.12 非線性規劃
局部極值與全域極值
局部極小值(極大值)與全域極小值(極大值)
2 2 2
= = =
2
2
3
4
(x - 7) + (y - 2)
2
x , y 吵 0, d i
作業研究 二版 Ch.12 非線性規劃
0 , i = 1, 2 , 3 , 4
p.6/44
範例12.5
/投資組合問題
問題:(1)股票9.8%、(2)債券4.6%、(3)基金5.3%
公司希望在達到每年6.0%的預期收益情況下,盡可 能降低投資組合的風險,其風險衡量如下:
1 2 3 4
2
每月平均 -y 座標 運貨次數 (0, 5) 35 ( 1, 3) 24 (1, 6) 18 (7, 2) 29
x
3
NLP模式:
M in s .t .
Z = 3 5d 1 + 2 4d d1 = d d d
2 2
+ 1 8d
+ 2 9d
2
4
( x - 0) + (y - 5) ( x + 1) + ( y - 3 ) ( x - 1) + ( y - 6 )
作業研究 二版 Ch.12 非線性規劃
12.3 極大值與極小值 /單變數
定理 12.1: x 是函數
dx
f (x)
的關鍵點,若且唯若
df (x )
0
關鍵點:極小點、極大點或鞍點( saddle point)
p.8/44
作業研究 二版 Ch.12 非線性規劃
12.3 極大值與極小值 /單變數
作業研究 二版 Ch.12 非線性規劃
12.1 前言
非線性規劃(nonlinear programming;NLP)數學 模式: 極小化 f ( x ) 受限於 g i ( x ) 0 i 1, 2 , , m 其中
f (x)
與所有 g i ( x ) 至少有一個函數是非線性的
(nonlinear) 。 電腦軟體:LINGO,可由網站() 免費下載
1 .2 x ( 9 .8 x 1 4 .6 x
2 2 2
2
2 8 .6 x 1 x
3
3 2 3
2 6 .8 x 2 x
1 6 .5 x
5 .3 x 3 ) / 5 0 0 0 6 .0
2
x1 x
x
3 3
5000 0
p.7/44
x 1, x 2, x