线性系统的状态空间表达式
线性定常系统的线性变换

⎢ ⎢
0
0
0L
1
⎥ ⎥
⎢ ⎢
0
⎥ ⎥
⎢⎣ − a 0 − a1 − a 2 L − a n −1 ⎥⎦
⎢⎣1 ⎥⎦
? 如何确定变换矩阵P
推导变换矩阵P:
假设变换矩阵P为
[ P =
p
T 1
] p
T 2
M
p
T n
T
P应该满足式(3-227),有
⎡ p1 ⎤ ⎡ 0
1
0L
0 ⎤ ⎡ p1 ⎤
⎢ ⎢
p2
⎥ ⎥
(3 − 208 )
几种常用的线性变换关系
1 化A阵为对角阵
⑴ 设A阵为任意方阵。且有n个互异实特征值 λ1,λ2,…,λn,则可 由非奇异线性变换化为对角阵Λ。
⎡λ1
⎤
⎢ Λ = P−1AP = ⎢
λ2
⎥ ⎥
⎢
O⎥
⎢ ⎣
λn
⎥ ⎦
P阵由A阵的实数特征向量 pi(i=1,2,…,n) 组成
(3 − 209)
⎣
∂p1
∂λ1
∂ 2 p1
∂
λ
2 1
L
∂ m −1 p1
∂
λ
m 1
−1
M
p m +1
L
式中
[ ] p1 = 1
λ1
λ
2 1
L
λ n −1 T 1
⎤ p n ⎥ (3 − 218 )
⎦ (3 − 219 )
J中虚线表示存在一个约当块。式中 p2, p3, …, pm为广义实特征向量,满足
⑶ 设A阵具有五重实特征值 λ1,且只有两个独立实特征向量p1, p2, 其余 为n-5个互异时特征值,A阵约当化的可能形式如下,式中,J中虚线表示存 在两个约当块。
6第六章 线性反馈系统的状态空间
[
[
]
]
]
k1 K = M k p
( A − BK )bi = Abi − b1 b2
令 c1i = k1bi , L c pi = k p bi
[
k1bi L bp M k p bi
]
( A − BK )bi = Abi − (c1i b1 + c2i b2 + L c pi b p )
第六章
线性反馈系统的状态空间综合
状态反馈 通过状态反馈进行极点配置和镇定 基于状态反馈的解耦控制 通过状态反馈进行跟踪控制设计 状态观测器
1
6.1 常用的反馈结构及其对系统特性的影响
1、常用的反馈结构 1)输出反馈 当系统为n阶状态,p个输入,q个输出时 u(t ) = r (t ) − H y(t )
& (t ) = ( A − BK ) x(t ) + Br (t ) x & (t ) = ( A − Bρk ) x(t ) + Br (t ) = ( A − bk ) x(t ) + Br (t ) x
其中 b = Bρ , b − n × 1 表明将多输入极点配置问题(A,B,K)转化成了单输入极点 配置问题(A,b,k)。 第三步:对单输入问题(A,b,k)证明若(A,b)能控,则 一定可以任意配置极点。
10
线性定常系统可用状态反馈任意配置极点的充要条件是系统完 全能控。 证明:必要性,即系统可任意配置极点,那么系统一定能控。 用反证法,当系统可任意配置极点,但系统不能控。 那么可以进行能控性分解 & (t ) = Ax (t ) + Bu (t ) x
y (t ) = Cx (t )
状态空间求传递函数
22
2
11
1
DCx C x D Du
2 11
22
21
状态空间表达式
x 1 x 2
A 1
B 2
C 1
0 A
2
x1 x 2ຫໍສະໝຸດ B 1BD 21u
y D C 21
C 2
x1 x 2
D 2
Du 1
传递函数阵
Y (s) Y (s) G (s)Y (s) G (s)G (s)U (s)
2
2
1
2
1
G(s) G (s)G (s)
2
1
3)反馈连接(u1=u-y2,u2=y,y=y1,D1=D2=0)
U
X1
U1
1(A1,B1,C1,D1) Y1
Y
Y2
2(A2,B2,C2,D2)
U2
x 1 A1x1 B1u1 A1x1 B1u B1C2x2 x 2 A2x2 B2u2 A2x2 B2C1x1
述系统的两组不同的状态变量,则状态变量之间有
非奇异线性变换,即
x P~x ~x P1x
p11 p12 p1n
P
p21
p22
p2n
pn1
pn2
pnn
知识回顾 Knowledge Review
祝您成功!
2.串联(前一系统的输出是后一系统的输入)
u=u1,u2=y1,y=y2
X1
X2
U1
1(A1,B1,C1,D1)
Y1 U2
2(A2,B2,C2,D2)
Y2
x A x B u
1
11
1
x A x B C x B D u
2
现代控制理论实验一、线性系统状态空间表达式的建立以及线性变换河南工业大学

河南工业大学《现代控制理论》实验报告专业: 自动化 班级: F1203 姓名: 蔡申申 学号:201223910625完成日期:2015年1月9日 成绩评定:一、实验题目:线性系统状态空间表达式的建立以及线性变换二、实验目的1. 掌握线性定常系统的状态空间表达式。
学会在MATLAB 中建立状态空间模型的方法。
2. 掌握传递函数与状态空间表达式之间相互转换的方法。
学会用MATLAB 实现不同模型之间的相互转换。
3. 熟悉系统的连接。
学会用MATLAB 确定整个系统的状态空间表达式和传递函数。
4. 掌握状态空间表达式的相似变换。
掌握将状态空间表达式转换为对角标准型、约当标准型、能控标准型和能观测标准型的方法。
学会用MATLAB 进行线性变换。
三、实验过程及结果1. 已知系统的传递函数 (a) )3()1(4)(2++=s s s s G 1.建立系统的TF 模型。
num=4;den=[1 5 7 3 0];G=tf(num,den)G =4-------------------------s^4 + 5 s^3 + 7 s^2 + 3 sContinuous-time transfer function.2.将给定传递函数用函数ss( )转换为状态空间表达式。
再将得到的状态空间表达式用函数tf( )转换为传递函数,并与原传递函数进行比较。
2.1转换成状态空间表达式。
Gss=ss(G)Gss =a =x1 x2 x3 x4x1 -5 -1.75 -0.75 0x2 4 0 0 0x3 0 1 0 0x4 0 0 1 0b =u1x1 1x2 0x3 0x4 0c =x1 x2 x3 x4y1 0 0 0 1d =u1y1 0Continuous-time state-space model.2.2将状态空间表达式转换成传递函数并计较。
G1=tf(Gss)G1 =4-------------------------s^4 + 5 s^3 + 7 s^2 + 3 sContinuous-time transfer function.由之前的实验结果可得实验中的传递函数相同,因为线性变换不改变系统的传递函数。
2.3线性连续时间状态空间表达式的离散化
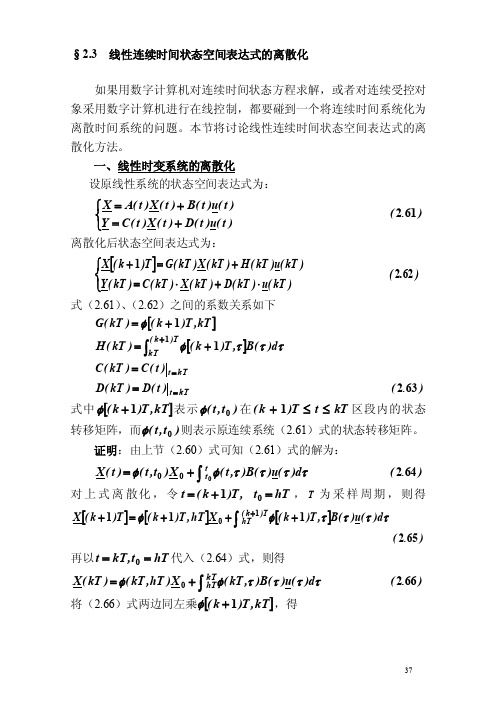
§2.3 线性连续时间状态空间表达式的离散化如果用数字计算机对连续时间状态方程求解,或者对连续受控对象采用数字计算机进行在线控制,都要碰到一个将连续时间系统化为离散时间系统的问题。
本节将讨论线性连续时间状态空间表达式的离散化方法。
一、线性时变系统的离散化 设原线性系统的状态空间表达式为:).()t (u )t (D )t (X )t (C Y )t (u )t (B )t (X )t (A X612⎩⎨⎧+=+=离散化后状态空间表达式为:[]).()kT (u )kT (D )kT (X )kT (C )kT (Y )kT (u )kT (H )kT (X )kT (G T )k (X 6221⎩⎨⎧⋅+⋅=+=+式(2.61)、(2.62)之间的系数关系如下[][]).()t (D )kT (D )t (C )kT (C d )(B ,T )k ()kT (H kT ,T )k ()kT (G kTt kT t T)k (kT632111==+==+=+=⎰τττφφ式中[]kT ,T )k (1+φ表示)t ,t (0φ在kT t T )k (≤≤+1区段内的状态转移矩阵,而)t ,t (0φ则表示原连续系统(2.61)式的状态转移矩阵。
证明:由上节(2.60)式可知(2.61)式的解为:).(d )(u )(B ),t (X )t ,t ()t (X t t 642000ττττφφ⎰+=对上式离散化,令hT t ,T )k (t =+=01,T 为采样周期,则得[][][]).(d )(u )(B ,T )k (X hT ,T )k (T )k (X T )k (hT65211110ττττφφ+++=+⎰+再以hT t ,kT t ==0代入(2.64)式,则得 ).(d )(u )(B ),kT (X )hT ,kT ()kT (X kT hT 6620ττττφφ⎰+=将(2.66)式两边同左乘[]kT ,T )k (1+φ,得[][][][][]).(d )(u )(B ,T )k (X hT ,T )k (d )(u )(B ),kT (kT ,T )k (X )hT ,kT (kT ,T )k ()kT (X kT ,T )k (kT hT kT hT 6721111100ττττφφττττφφφφφ+++=++⋅+=+⎰⎰将(2.65)式减去(2.67)式得:[][][]).(d )(u )(B ,T )k ()kT (X kT ,T )k (T )k (X T )k (kT 6821111ττττφφ+++=+⎰+上式中,令[][]τττφφd )(B ,T )k ()kT (H kT ,T )k ()kT (G T)k (kT⎰+=+=+111设在区间[]T )k (,kT 1+内,)kT (u )(u =τ,则(2.68)式可简写成: [])kT (u )kT (H )kT (X )kT (G T )k (X ⋅+⋅=+1 同时,对(2.61)式输出方程离散化,则证明了)kT (u )kT (D )kT (X )kT (C )kT (Y ⋅+=二、线性时不变系统的离散化 对于线性时不变系统).(uD X C Y u B X A X692⎩⎨⎧+=+=离散化状态空间表达式为).()kT (u D )kT (X C )kT (Y )kT (u )T (H )kT (X )T (G T )k (X 7021⎩⎨⎧+=+=+其中D ,C ),T (H ),T (G 均为常数阵,且).(B)d e ()T (H e)T (G A T AT 7120⎪⎩⎪⎨⎧==⎰ττ证明:由于时不变系统是时变系统的一种特殊情况,所以只需要证明式(2.71)成立即可。
线性控制理论总复习(2012)
(1)
线性时变系统的对偶系统的状态空间描述为:
d : T AT (t ) T C T (t ) T T BT (t ) T
(2)
式中: —协状态, n维行向量; —输出, p维行向量;
如果其状态空间描述具有如下形式
ˆ ˆ ˆ ˆ x Ao x bou
其中:
0 0 0 1 1 ˆ Ao 1 n-1
ˆ ˆ y co x
ˆ co 0 0 1
则称此状态空间描述为能观测规范形。
25
总复习:现代控制理论
2.PBH秩判据
i I A rank n; C
i 1, 2, , n
3.对角线规范型判据
4.约当规范型判据
13
总复习:现代控制理论
3. 对角线规范型判据(※)
当矩阵A的特征值 1 , 2 ,, n 为两两相异时, 线性定常连续系统 x Ax x(0) x0 t0 y Cx
x (t ) L1 X ( s ) L1 (s A) 1[ x0 +B U ( s )]
9
总复习:现代控制理论
第4章 线性系统的可控性与可观测性
一、线性定常连续系统的可控性判据(※) 1.秩判据
rankQc rank B AB An 1 B n
2.PBH秩判据
rank i I A B n
i 1, 2, , n
3.对角线规范型判据 4.约当规范型判据
10
总复习:现代控制理论
3.对角线规范型判据(※)
当矩阵A的特征值 1 , 2 ,, n 为两两相异时, 线性定常连续系统 x(t ) Ax(t ) Bu (t ) x(0) x0 t 0 完全能控的充分必要条件是:其对角线规范型
胡寿松《自动控制原理》笔记和课后习题(含考研真题)详解(线性系统的状态空间分析与综合)【圣才】
具有非正(负或零)实部,且具有零实部的特征值为 A 的最小多项式单根。
(2)系统的唯一平衡状态 xe=0 是渐近稳定的充分必要条件:A 的所有特征根均具有
3.线性定常连续系统状态方程的解 (1)齐次方程求解方法:幂级数法;拉普拉斯变换法。 (2)非齐次方程求解方法:积分法;拉普拉斯变换法。
4.传递函数矩阵 表达式:G(s)=C(sI-A)-1B+D
二、线性系统的可控性与可观测性 1.可控性 如果系统的每一个状态变量的运动都可由输入来影响和控制,而由任意的始点达到原点, 则该系统是完全可控系统,简称为系统可控。 (1)可控标准形
5 / 75
圣才电子书 十万种考研考证电子书、题库视频学习平台
的任意初始态 x0 出发的运动轨迹 x(t;x0,t0),在 t→∞都满足:||x(t;x0,t0)-xe||≤ε,
t≥t0,则称 xe 是李雅普诺夫意义下稳定的。
(3)渐近稳定
系统不仅满足李氏意义下的稳定,且
(2)可观测性判据
3 / 75
圣才电子书 十万种考研考证电子书、题库视频学习平台
状态空间表达式及其与传递函数间的关系

x Ax Bu y Cx Du
u(t)
y(t)
系统
A : 系统(状态)矩阵 (n n)
B : 控制(输入)矩阵 (n p)
C : 输出矩阵 (q n)
D : 前馈矩阵 (q p)
A、B、C、D 为常数阵 定常系统
A、B、C、D 含时变参数 时变系统
9
x Ax Bu y Cx Du
不同状态变量之间存在线性变换关系
13
2.6 两种模型的相互转化
2.6.1由状态空间模型转化为传递函数(阵) 2.6.2由传递函数转化为状态空间描述 应用MATLAB进行模型之间的相互转化(自
学)
14
2.6.1 由状态空间模型转化为传递函数(阵)
设 线 性 定 常 系 统 的 状 态空 间 模 型 为
0 1u
1 G( s ) LCs2 RCs 1
y 1
0
x1 x2
由同一系统的不同状态空间表
达式导出的传递函数(阵)必
然相同
18
2.6.2 由系统传递函数建立状态空间模型
之前已知:由微分方程转
A,B,C,D
化为状态空间模型
u(t)
y(t)
系统
U(s)
x Ax Bu 注意! u(t)
G(s)
y(t)
y Cx Du
系统
对其进行拉氏变换 sX(s) x(0 ) AX(s) BU(s) Y(s) CX(s) DU(s)
对应的传递函数(阵)为
令初始条件为零, x( 0 ) 0 得:sX(s) AX(s) BU(s)
x n
xn