自动控制原理实验_典型环节和阶跃响应
自动控制原理实验指导讲解
%100%max ⨯-=∞∞Y Y Y σ实验一 典型环节及其阶跃响应一、实验目的1. 掌握控制模拟实验的基本原理和一般方法。
2. 掌握控制系统时域性能指标的测量方法。
二、实验仪器1. EL-AT-III 型自动控制系统实验箱一台 2. 计算机一台 三、实验原理1.模拟实验的基本原理:控制系统模拟实验采用复合网络法来模拟各种典型环节,即利用运算放大器不同的输入网络和反馈网络模拟各种典型环节,然后按照给定系统的结构图将这些模拟环节连接起来,便得到了相应的模拟系统。
再将输入信号加到模拟系统的输入端,并利用计算机等测量仪器,测量系统的输出,便可得到系统的动态响应曲线及性能指标。
若改变系统的参数,还可进一步分析研究参数对系统性能的影响。
2. 时域性能指标的测量方法: 超调量Ó %:1) 启动计算机,在桌面双击图标 [自动控制实验系统] 运行软件。
2) 检查USB 线是否连接好,在实验项目下拉框中选中任实验,点击按钮,出现参数设置对话框设置好参数按确定按钮,此时如无警告对话框出现表示通信 正常,如出现警告表示通信不正常,找出原因使通信正常后才可以继续进行实验。
3) 连接被测量典型环节的模拟电路。
电路的输入U1接A/D 、D/A 卡的DA1 输出,电路的输出U2接A/D 、D/A 卡的AD1输入。
检查无误后接通电源。
4) 在实验项目的下拉列表中选择实验一[典型环节及其阶跃响应] 。
5)鼠标单击按钮,弹出实验课题参数设置对话框。
在参数设置对话框中设置相应的实验参数后鼠标单击确认等待屏幕的显示区显示实验结果。
6) 用软件上的游标测量响应曲线上的最大值和稳态值,代入下式算出超调量: T P 与T S :利用软件的游标测量水平方向上从零到达最大值与从零到达95%稳态值所需的时间值,便可得到T P 与T S 。
四、实验内容构成下述典型一阶系统的模拟电路,并测量其阶跃响应: 1. 比例环节的模拟电路及其传递函数如图1-1。
自动控制原理实验指导典型环节及其阶跃响应

%100%max ⨯-=∞∞Y Y Y σ实验一 典型环节及其阶跃响应一、实验目的1. 掌握控制模拟实验的基本原理和一般方法。
2. 掌握控制系统时域性能指标的测量方法。
二、实验仪器1. EL-AT-III 型自动控制系统实验箱一台 2. 计算机一台 三、实验原理1.模拟实验的基本原理:控制系统模拟实验采用复合网络法来模拟各种典型环节,即利用运算放大器不同的输入网络和反馈网络模拟各种典型环节,然后按照给定系统的结构图将这些模拟环节连接起来,便得到了相应的模拟系统。
再将输入信号加到模拟系统的输入端,并利用计算机等测量仪器,测量系统的输出,便可得到系统的动态响应曲线及性能指标。
若改变系统的参数,还可进一步分析研究参数对系统性能的影响。
2. 时域性能指标的测量方法: 超调量Ó %:1) 启动计算机,在桌面双击图标 [自动控制实验系统] 运行软件。
2) 检查USB 线是否连接好,在实验项目下拉框中选中任实验,点击按钮,出现参数设置对话框设置好参数按确定按钮,此时如无警告对话框出现表示通信 正常,如出现警告表示通信不正常,找出原因使通信正常后才可以继续进行实验。
3) 连接被测量典型环节的模拟电路。
电路的输入U1接A/D 、D/A 卡的DA1 输出,电路的输出U2接A/D 、D/A 卡的AD1输入。
检查无误后接通电源。
4) 在实验项目的下拉列表中选择实验一[典型环节及其阶跃响应] 。
5) 鼠标单击按钮,弹出实验课题参数设置对话框。
在参数设置对话框中设置相应的实验参数后鼠标单击确认等待屏幕的显示区显示实验结果。
6) 用软件上的游标测量响应曲线上的最大值和稳态值,代入下式算出超调量: T P 与T S :利用软件的游标测量水平方向上从零到达最大值与从零到达95%稳态值所需的时间值,便可得到T P 与T S 。
四、实验内容构成下述典型一阶系统的模拟电路,并测量其阶跃响应: 1. 比例环节的模拟电路及其传递函数如图1-1。
典型环节与及其阶跃响应
实验一: 典型环节与及其阶跃响应一、实验目的1、掌握控制模拟实验的基本原理和一般方法。
2、掌握控制系统时域性能指标的测量方法。
二、实验仪器1、EL-AT-III 型自动控制系统实验箱一台2、计算机一台三、实验原理控制系统模拟实验采用复合网络法来模拟各种典型环节,即利用运算放大器不同的输入网络和反馈网络模拟各种典型环节,然后按照给定系统的结构图将这些模拟环节连接起来,便得到了相应的模拟系统。
再将输入信号加到模拟系统的输入端,并利用计算机等测量仪器,测量系统的输出,便可得到系统的动态响应曲线及性能指标。
若改变系统的参数,还可进一步分析研究参数对系统性能的影响。
四、实验内容构成下述典型一阶系统的模拟电路,并测量其阶跃响应1、比例环节的模拟电路及其传递函数G(S)= −R2/R12、惯性环节的模拟电路及其传递函数G(S)= −K/TS+1K=R2/R1T=R2C3、积分环节的模拟电路及传递函数G(S)=1/TST=RC4、微分环节的模拟电路及传递函数G(S)= −RCS5、比例+微分环节的模拟电路及传递函数G(S)= −K(TS+1)K=R2/R1T=R1C五、实验结果及分析(注:图中黄色为输入曲线、紫色为输出曲线)1、比例环节(1)模拟电路图:(2)响应曲线:2、惯性环节(1)模拟电路图:(2)响应曲线:(3)传递函数计算:实验值:X1=1029ms=1.029s=4TT=0.257sK=Y2/1000=2.017G(S)=-2.017/(0.257S+1) 理论值:G(S)=-2/(0.2S+1)结论:实验值与理论值相近。
3、积分环节(1)模拟电路图:(2)响应曲线:(3)传递函数计算:实验值:5000/(2110/2/2)=9.1G(S)=-9.1/S=-1/0.11S 理论值:G(S)=-1/0.1S结论:实验值与理论值相近。
4、微分环节(1)模拟电路图:(2)响应曲线:5、比例+微分环节(1)模拟电路图:(2)响应曲线:实验二:二阶系统阶跃响应一、实验目的1、研究二阶系统的特征参数,阻尼比ζ和无阻尼自然频率ωn 对系统动态性能的影响。
自动控制实验报告一-典型环节及其阶跃响应

实验一环典型环节节及其阶跃响应班级:学号:姓名:一、实验目的1.学习构成典型环节的模拟电路,了解电路参数对环节特性的影响;2.学习典型环节阶跃响应的测量方法,并学会根据阶跃响应曲线计算典型环节的传递函数;二、实验仪器1.EL-AT-II型自动控制系统实验箱一台2.计算机一台三、实验原理1.模拟实验的基本原理:控制系统模拟实验采用复合网络法来模拟各种典型环节,即利用运算放大器不同的输入网络和反馈网络模拟各种典型环节,然后按照给定系统的结构图将这些模拟环节连接起来,便得到了相应的模拟系统。
再将输入信号加到模拟系统的输入端,并利用计算机等测量仪器,测量系统的输出,便可得到系统的动态响应曲线及性能指标。
若改变系统的参数,还可进一步分析研究参数对系统性能的影响。
2.时域性能指标的测量方法:超调量Ó%:1)启动计算机,在桌面双击图标[自动控制实验系统] 运行软件。
2)测试计算机与实验箱的通信是否正常,通信正常继续。
如通信不正常查找原因使通信正常后才可以继续进行实验。
3)连接被测量典型环节的模拟电路。
电路的输入U1接A/D、D/A卡的DA1输出,电路的输出U2接A/D、D/A卡的AD1输入。
检查无误后接通电源。
4)在实验课题下拉菜单中选择实验一[典型环节及其阶跃响应] 。
5)鼠标单击实验课题弹出实验课题参数窗口。
在参数设置窗口中设置相应的实验参数后鼠标单击确认等待屏幕的显示区显示实验结果。
6)用软件上的游标测量响应曲线上的最大值和稳态值,代入下式算出超调量:YM A X- Y∞Ó%=——————×100%Y∞ T P 与T S :利用软件的游标测量水平方向上从零到达最大值与从零到达95%稳态 值所需的时间值,便可得到T P 与T S 。
四、实验内容构成下述典型一阶系统的模拟电路,并测量其阶跃响应: 1.比例环节的模拟电路及其传递函数:G (s )=-R1/R22.惯性环节:G(s)= -K/TS+1 K=R2/R1 ,T=R2C; 3.积分环节 G(S)= 1/TS T=RC 4.微分环节G(S)=-RCS5.比例+微分环节G(S)= -K(TS+1) K=R2/R1 T=R2C6.比例+积分环节G(S)=K(1+1/TS) K=R2/R1 T=R2C五、实验步骤1.启动计算机,在桌面双击图标【自动控制实验系统】运行软件。
《自动控制》一二阶典型环节阶跃响应实验分析报告
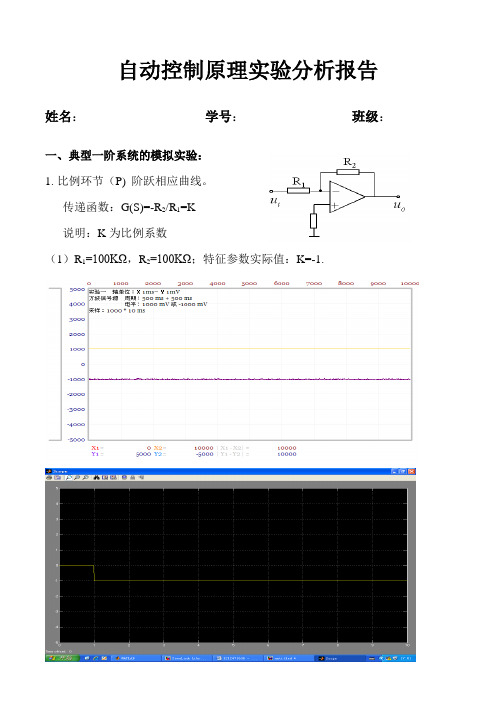
自动控制原理实验分析报告姓名:学号:班级:一、典型一阶系统的模拟实验:1.比例环节(P) 阶跃相应曲线。
传递函数:G(S)=-R2/R1=K说明:K为比例系数(1)R1=100KΩ,R2=100KΩ;特征参数实际值:K=-1.(2)(2)R1=100KΩ,R2=200KΩ;即K=-2.〖分析〗:经软件仿真,比例环节中的输出为常数比例增益K;比例环节的特性参数也为K,表征比例环节的输出量能够无失真、无滞后地按比例复现输入量。
2、惯性环节(T) 阶跃相应曲线及其分析。
传递函数:G(S)=-K/(TS+l) K=R2/R1 , T=R2C说明:特征参数为比例增益K和惯性时间常数T。
(1)、R2=R1=100KΩ , C=1µF;特征参数实际值:K=-1,T=0.1。
(2)、R2=R1=100KΩ , C=0.1µF;特征参数实际值:K=-1,T=0.01。
〖分析〗:惯性环节的阶跃相应是非周期的指数函数,当t=T时,输出量为0.632K,当t=3~4T时,输出量才接近稳态值。
比例增益K表征环节输出的放大能力,惯性时间常数T表征环节惯性的大小,T越大表示惯性越大,延迟的时间越长,反之亦然。
传递函数:G(S)= -l/TS ,T=RC说明:特征参数为积分时间常数T。
(1)、R=100KΩ , C=1µF;特征参数实际值:T=0.1。
(2)R=100KΩ , C=0.1µF;特征参数实际值:T=0.01。
〖分析〗:只要有一个恒定输入量作用于积分环节,其输出量就与时间成正比地无限增加,当t=T时,输出量等于输入信号的幅值大小。
积分时间常数T表征环节积累速率的快慢,T越大表示积分能力越强,反之亦然。
4、比例积分环节(PI) 阶跃相应曲线及其分析。
传递函数:G(S)=K( l+l/TS) K=-R2/R1, T=R2C说明:特征参数为比例增益K和积分时间常数T。
(1)、R2=R1=100KΩ , C=1µF;特征参数实际值:K=-1,T=0.1。
自动控制原理实验报告
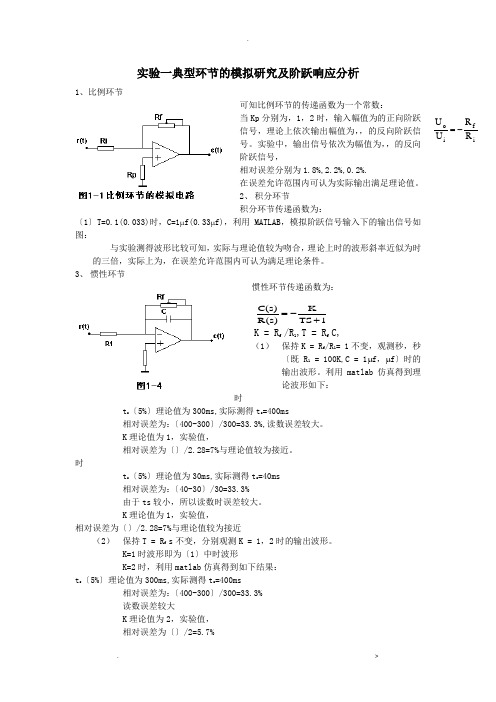
实验一典型环节的模拟研究及阶跃响应分析1、比例环节可知比例环节的传递函数为一个常数:当Kp 分别为,1,2时,输入幅值为的正向阶跃信号,理论上依次输出幅值为,,的反向阶跃信号。
实验中,输出信号依次为幅值为,,的反向阶跃信号,相对误差分别为1.8%,2.2%,0.2%.在误差允许范围内可认为实际输出满足理论值。
2、 积分环节积分环节传递函数为:〔1〕T=0.1(0.033)时,C=1μf(0.33μf),利用MATLAB ,模拟阶跃信号输入下的输出信号如图:与实验测得波形比较可知,实际与理论值较为吻合,理论上时的波形斜率近似为时的三倍,实际上为,在误差允许范围内可认为满足理论条件。
3、 惯性环节惯性环节传递函数为:K = R f /R 1,T = R f C,(1) 保持K = R f /R 1= 1不变,观测秒,秒〔既R 1 = 100K,C = 1μf ,μf 〕时的输出波形。
利用matlab 仿真得到理论波形如下:时t s 〔5%〕理论值为300ms,实际测得t s =400ms 相对误差为:〔400-300〕/300=33.3%,读数误差较大。
K 理论值为1,实验值,相对误差为〔〕/2.28=7%与理论值较为接近。
时t s 〔5%〕理论值为30ms,实际测得t s =40ms 相对误差为:〔40-30〕/30=33.3% 由于ts 较小,所以读数时误差较大。
K 理论值为1,实验值,相对误差为〔〕/2.28=7%与理论值较为接近(2) 保持T = R f s 不变,分别观测K = 1,2时的输出波形。
K=1时波形即为〔1〕中时波形K=2时,利用matlab 仿真得到如下结果:t s 〔5%〕理论值为300ms,实际测得t s =400ms相对误差为:〔400-300〕/300=33.3% 读数误差较大K 理论值为2,实验值, 相对误差为〔〕/2=5.7%if i o R RU U -=1TS K)s (R )s (C +-=与理论值较为接近。
《自动控制》一二阶典型环节阶跃响应实验分析报告

《自动控制》一二阶典型环节阶跃响应实验分析报告一、实验目的本实验旨在通过实际的一二阶典型环节阶跃响应实验,掌握自动控制理论中的基本概念和方法,并能够分析系统的动态响应特性。
二、实验原理1.一阶惯性环节:一阶惯性环节是工程实际中常见的系统模型,其传递函数为G(s)=K/(Ts+1),其中K为传递函数的增益,T为时间常数。
2.二阶惯性环节:二阶惯性环节是另一类常见的系统模型,其传递函数为G(s)=K/((Ts+1)(αTs+1)),其中K为传递函数的增益,T为时间常数,α为阻尼系数。
3.阶跃响应:阶跃响应是指给定一个单位阶跃输入,观察系统的输出过程。
根据系统的阶数不同,其响应形式也不同。
实验仪器:电动力控制实验台,控制箱,计算机等。
三、实验步骤1.将实验台上的一阶惯性环节模型接入控制箱和计算机,并调整增益和时间常数的初始值。
2.发送一个单位阶跃信号给控制器,观察实验台上的输出响应,并记录时间和输出值。
3.根据记录的数据,绘制一阶惯性环节的阶跃响应图像。
4.类似地,将实验台上的二阶惯性环节模型接入控制箱和计算机,并调整增益、时间常数和阻尼系数的初始值。
5.发送一个单位阶跃信号给控制器,观察实验台上的输出响应,并记录时间和输出值。
6.根据记录的数据,绘制二阶惯性环节的阶跃响应图像。
四、实验结果与分析1.一阶惯性环节的阶跃响应图像如下:(在此插入阶跃响应图像)根据图像可以看出,随着时间的增加,输出逐渐趋于稳定。
根据实验数据,可以计算出一阶惯性环节的增益K和时间常数T的估计值。
2.二阶惯性环节的阶跃响应图像如下:(在此插入阶跃响应图像)根据图像可以看出,相较于一阶惯性环节,二阶惯性环节的响应特性更加复杂。
根据实验数据,可以计算出二阶惯性环节的增益K、时间常数T和阻尼系数α的估计值。
五、实验结论通过本实验,我们成功地进行了一二阶典型环节阶跃响应实验,并获得了实际的响应数据。
通过对实验数据的分析,我们得到了一阶惯性环节和二阶惯性环节的估计参数值。
自动控制原理实验(全面)
自动控制原理实验实验一 典型环节的电模拟及其阶跃响应分析一、实验目的⑴ 熟悉典型环节的电模拟方法。
⑵ 掌握参数变化对动态性能的影响。
二、实验设备⑴ CAE2000系统(主要使用模拟机,模/数转换,微机,打印机等)。
⑵ 数字万用表。
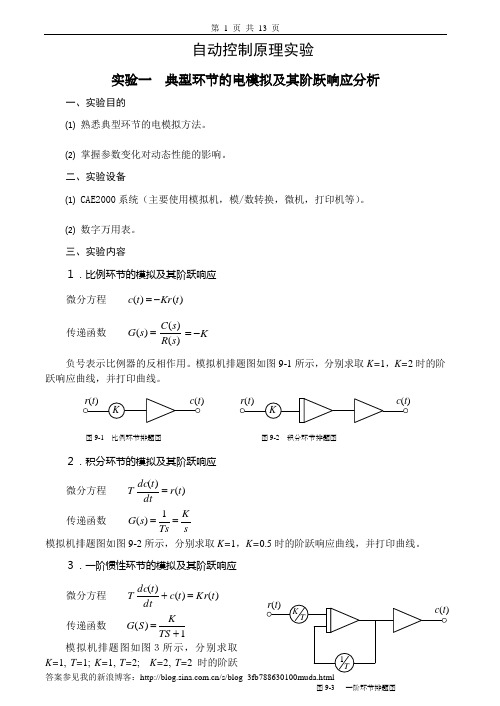
三、实验内容1.比例环节的模拟及其阶跃响应微分方程 )()(t Kr t c -= 传递函数 =)(s G )()(s R s C K -= 负号表示比例器的反相作用。
模拟机排题图如图9-1所示,分别求取K=1,K=2时的阶跃响应曲线,并打印曲线。
图9-1 比例环节排题图 图9-2 积分环节排题图 2.积分环节的模拟及其阶跃响应微分方程 )()(t r dtt dc T= 传递函数 sKTs s G ==1)(模拟机排题图如图9-2所示,分别求取K=1,K=0.5时的阶跃响应曲线,并打印曲线。
3.一阶惯性环节的模拟及其阶跃响应微分方程 )()()(t Kr t c dtt dc T=+ 传递函数 1)(+=TS KS G模拟机排题图如图3所示,分别求取K=1, T=1; K=1, T=2; K=2, T=2 时的阶跃响应曲线,并打印曲线。
4.二阶系统的模拟及其阶跃响应微分方程 )()()(2)(222t r t c dt t dc T dt t c d T =++ξ传递函数 121)(22++=Ts s T s G ξ2222nn n s s ωξωω++= 画出二阶环节模拟机排题图,并分别求取打印: ⑴ T=1,ξ=0.1、0.5、1时的阶跃响应曲线。
⑵ T=2,ξ=0.5 时的阶跃响应曲线。
四、实验步骤⑴ 接通电源,用万用表将输入阶跃信号调整为2V 。
⑵ 调整相应系数器;按排题图接线,不用的放大器切勿断开反馈回路(接线时,阶跃开关处于关断状态);将输出信号接至数/模转换通道。
⑶ 检查接线无误后,开启微机、打印机电源;进入CAE2000软件,组态A/D ,运行实时仿真;开启阶跃输入信号开关,显示、打印曲线。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
11.实验步骤同4~7。
微分环节
12.连接被测量典型环节的模拟电路(图2-4)。电路的输入Ul接A/D、D/A卡的DAl输出,电路的输出U2接A/D、D/A卡的ADl输入。检查无误后接通电源。
广州大学学生实验报告
开课学院及实验室:实验中心2013年11月4日
学院
机电
年级、专业、班
姓名
学号
实验课程名称
成绩
实验项目名称
典型环节及其阶跃响应
指导
教师
一、实验目的
二、实验原理(实验相关基础知识、理论)
三、实验过程原始记录(程序界面、代码、设计调试过程描述等)
四、实验结果及总结
一、实验目的
1.学习构成典型环节的模拟电路,了解电路参数对环节特性的影响。
4.在实验课题下拉菜单中选择实验一(典型环节及其阶跃响应)。
5.鼠标单击实验课题弹出实验课题参数窗口。在参数设置窗口中设置相应的实验参数后鼠标单击确认等待屏幕的显示区显示实验结果。
6.观测计算机屏幕显示出的响应曲线及数据。
7.记录波形及数据。
惯性环节
8.连接被测量典型环节的模拟电路(图2-2)。电路的输入U1接A/D、D/A卡的DAl输出,电路的输出U2接A/D、D/A卡的ADl输入。检查无误后接通电源。
图2-6
G(S)=K(1+1/TS) K=R2/R1, T=R2C
3、实验过程原始记录
1.启动计算机,在桌面双击图标(自动控制实验系统)运行软件。
2.测试计算机与实验箱的通信是否正常,通信正常继续。如通信不正常查找原因使通信正常后才可以继续进行实验。
比例环节
3.连接被测量典型环节的模拟电路(图2-1)。电路的输入U1接A/D、D/A卡的DA1输出,电路的输出U2接A/D、D/A卡的DA1输入。检查无误后接通电源。
2.学习典型环节阶跃响应的测量方法,并学会由阶跃响应曲线计算典型环节的传递函数。
二、实验原理及电路图
(一) 用实验箱构成下述典型环节的模拟电路,并测量其阶跃响应。
1.比例环节的模拟电路及其传递函数如图2-1。
图2-1
G(S)= -R2/R1
2.惯性环节的模拟电路及其传递函数如图2-2。
图2-2
G(S)=-K/(TS+1) K=R2/R1, T=R2C
l3.实验步骤同4~7。
比例+微分环节
14.连接被测量典型环节的模拟电路(图2-5)。电路的输入Ul接A/D、D/A卡的DAI输出,电路的输出U2接A/D、D/A卡的ADI输入。检查无误后接通电源。
15.实验步骤同4~7。
比例+积分环节
16.连接被测量典型环节的模拟电路(图2-6)。电路的输入U1接A/D、D/A卡的DAI输出,电路的输出U2接A/D、D/A卡的ADI输入。检查无误后接通电源。
l7.实验步骤同4~7。
实验截图
1.比例环节
2.惯性环节
3.积分环节
4.微分环节
5.比例+微分环节
6.比例+积分环节
四、实验结果及总结
1.各环节的响应曲线如上所示。
实验体会:通过这次实验,我们学会了如何构成典型环节的模拟电路及用计算机测量各典型环节的阶跃响应曲线。在本次实验中出现了波形失真的情况,一开始找不到解决的办法,后来我们不断的调节参数,才得到正确的波形,也明白了,只有理解并掌握了原理才能做出正确的实验结果。
3.积分环节的模拟电路及其传递函数如图2-3。
图2-3
G(S)=-1/TS T=RC
4.微分环节的模拟电路及其传递函数如图2-4。
图2-4
G(S)=-RCS
5.比例+微分环节的模拟电路及其传递函数如图2-5。
图2-5
G(S)=-K(TS+1) K=R2/R1,T=R2C
6.比例+积分环节的模拟电路及其传递函数如图2-6。