北航最优化方法大作业参考
北航最优化方法大作业参考
1 流量工程问题1.1 问题重述定义一个有向网络G=(N,E),其中N是节点集,E是弧集。
令A是网络G的点弧关联矩阵,即N×E阶矩阵,且第l列与弧里(I,j)对应,仅第i行元素为1,第j行元素为-1,其余元素为0。
再令b m=(b m1,…,b mN)T,f m=(f m1,…,f mE)T,则可将等式约束表示成:Af m=b m本算例为一经典TE算例。
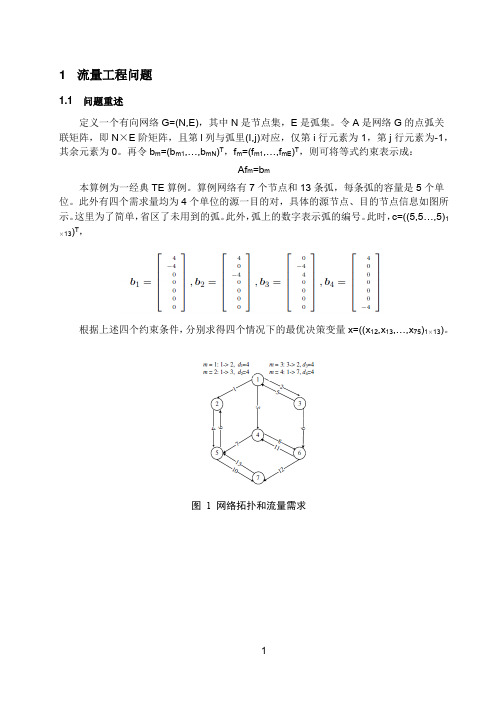
算例网络有7个节点和13条弧,每条弧的容量是5个单位。
此外有四个需求量均为4个单位的源一目的对,具体的源节点、目的节点信息如图所示。
这里为了简单,省区了未用到的弧。
此外,弧上的数字表示弧的编号。
此时,c=((5,5…,5)1 )T,×13)。
根据上述四个约束条件,分别求得四个情况下的最优决策变量x=((x12,x13,…,x75)1×13图 1 网络拓扑和流量需求1.2 7节点算例求解1.2.1 算例1(b1=[4;-4;0;0;0;0;0]T)转化为线性规划问题:Minimize c T x1Subject to Ax1=b1x1>=0利用Matlab编写对偶单纯形法程序,可求得:最优解为x1*=[4 0 0 0 0 0 0 0 0 0 0 0 0]T对应的最优值c T x1=201.2.2 算例2(b2=[4;0;-4;0;0;0;0]T)Minimize c T x2Subject to Ax2=b2X2>=0利用Matlab编写对偶单纯形法程序,可求得:最优解为x2*=[0 4 0 0 0 0 0 0 0 0 0 0 0]T对应的最优值c T x2=201.2.3 算例3(b3=[0;-4;4;0;0;0;0]T)Minimize c T x3Subject to Ax3=b3X3>=0利用Matlab编写对偶单纯形法程序,可求得:最优解为x3*=[4 0 0 0 4 0 0 0 0 0 0 0 0]T对应的最优值c T x3=401.2.4 算例4(b4=[4;0;0;0;0;0;-4]T)Minimize c T x4Subject to Ax4=b4X4>=0利用Matlab编写对偶单纯形法程序,可求得:最优解为x4*=[4 0 0 4 0 0 0 0 0 4 0 0 0]T对应的最优值c T x4=601.3 计算结果及结果说明1.3.1 算例1(b1=[4;-4;0;0;0;0;0]T)算例1中,由b1可知,节点2为需求节点,节点1为供给节点,由节点1将信息传输至节点2的最短路径为弧1。
北航最优化大作业
北航最优化大作业1.引言旅行商问题(Traveling Salesman Problem,TSP)是一种经典的组合优化问题,目标是找到一条路径,使得旅行商从起点出发,途经所有城市一次后返回起点,并且总路径长度最短。
TSP问题具有NP-hard的特性,寻找最优解是一个非常具有挑战性的任务。
本文将基于禁忌算法,探讨TSP问题的求解方法。
2.禁忌算法简介禁忌算法是一种基于局部的元启发式算法,通过在过程中禁止一定的动作来跳出局部最优解,以期望获得更好的全局最优解。
算法通过引入禁忌表和禁忌长度等机制,避免过程中陷入局部最优解。
3.TSP问题的数学建模假设有n个城市,城市之间的距离可以表示为一个n×n的距离矩阵D。
TSP问题的目标可以定义为:min ∑_(i=1)^n ∑_(j=1)^(n) D_ij*x_ijs.t. ∑_(i=1)^n x_ij=1,∑_(j=1)^n x_ij=1,∀i ≠ jx_ij∈{0,1}, 1≤i,j≤n其中x_ij表示城市i与城市j之间的路径是否存在,1表示存在,0表示不存在。
4.禁忌算法在TSP问题中的应用(1)初始化选取一个起始解x,计算其路径长度f(x)。
将x设为当前解x_best,将f(x)设为当前解的最优值f_best。
(2)选择邻域解选择当前解的一个邻域解x',使得x'与x只有一个位置上的交换。
通过随机选择两个位置,进行交换操作。
(3)禁忌判断如果邻域解x'的路径长度f(x')小于当前解的最优值f_best,则更新f_best为f(x'),并将x'设为新的当前解。
否则,比较x'与当前解的禁忌情况。
(4)禁忌更新如果x'未在禁忌表中,或者禁忌表中对应的禁忌周期已过,则将x'设为新的当前解。
否则,选择一个路径长度较短的邻域解x'',即使其路径长度f(x'')大于f_best。
北航最优化方法最新最全答案2015版

将此问题化成线性规划.
minimize f (x)
x∈Rn
subject to Ax = b
x ≥ 0.
5
解: 引入变量 t ,所给问题等价于
minimize t subject to f (x) = t,
Ax = b, x ≥ 0.
考虑问题
minimize t
subject to f (x) ≤ t, Ax = b,
4. 单纯形法的练习:习题2.10,习题2.11,习题2.12,习题2.13,习题2.20(说明单纯形 法的效率的一般性例子中,自变量为三个时所得问题),习题2.21(说明单纯形法采用最小 相对费用系数进基原则确定进基变量时,如果所求解问题是退化的,则单纯形法会出现 循环!),习题2.31.
5. 两阶段法的练习:习题2.14-习题2.16;大 M 法的练习:习题2.18.
2u1 − 2v1 + u3 − v3 = 3, ui, vi, s ≥ 0, i = 1, 2, 3.
方法2: 引入非负变量 t1, t2, t3 ,将原问题转化成等价问题
minimize t1 + t2 + t3 subject to x + y ≤ 1,
2x + z = 3, |x| = t1, |y| = t2, |z| = t3.
(c)
minimize subject to
x1 + 4x2 + x3 x1 − 2x2 + x3 = 4 x1 − x3 = 1
x2 ≥ 0, x3 ≥ 0.
解:
(c) 由于变量 x1 无限制,可利用约束 x1 = x3 + 1 对其消去. 因此,得其标准形
北航最优化方法作业答案uco_trustregion

理想特性: 在 x(k) 靠近局部解之前线搜索法用步长来限制 探搜索方向 p(k) 使 f(x) 获取充分下降; 而在 x(k)接近局部 解时, 该限制无效, 即步长为 1,迭代恢复为快速收敛的 基本牛顿法. 理想特性: 在 x(k) 靠近局部解之前信赖域法用信赖域约束 来限制探测步 s(k) 使 f(x) 获取充分下降; 而在 x(k)接近 局部解时, 该限制无效, 从而迭代恢复为快速收敛的基 本(即步长为 1)牛顿法.
基本信赖域法的收敛性
第 6 章 无约束优化:信赖域法 数学规划基础 LHY-SMSS-BUAA
Steihaug-Conjugate Gradient Method
min = q (s) :
s ≤∆ 1 2
s Bs + g s
T T
q(s)
第 6 章 无约束优化:信赖域法
数学规划基础
LHY-SMSS-BUAA
第 6 章 无约束优化:信赖域法
数学规划基础
LHY-SMSS-BUAA
近似求解信赖域子问题:dog-leg法
min q ( k ) ( s ) = :
s ≤∆ k 1 2
s T G ( k ) s + g ( k )T s + f ( k )
⊙ 近似方法 :找 s(k) 使得 q(k) q(k) ⊙ dog-leg法(折线法),适合 G(k) 正定的问题 当 ∆ k 较小时, 柯西点较恰当 − g ( k ) 当 ∆ k 较大时, 牛顿步较恰当
第 6 章 无约束优化:信赖域法 数学规划基础 LHY-SMSS-BUAA
原型算法的收敛性
信赖域型牛顿法! 定理6.1.1 若算法6.1.1产生的序列 {x(k)}有界,且 f(x) 二次连 续可微. 则序列 {x(k)} 必有聚点 x*满足一阶和二阶最优性条 件,即 g*= 0 且 G* 半正定. 定理6.1.2 若定理6.1.1中的聚点 x*还满足二阶充分条件,即 g*= 0 且G*正定,则 (b) 对充分大的k,信赖域约束 收敛速度是二次的.
北航最优化大作业
图 18: 前两行为迭代点 xk, 后面一行为梯度的 2 范数,显然,前两行行都趋于无穷大,发散,梯度的 2 范数 趋于 13.4536(从 matlab 变量表格中得到)。 4: 初始点 x(0) = (10, 20)T 前两行为迭代点 xk, 后面一行为梯度的 2 范数,显然,前两行行都趋于无穷大,发散,梯度的 2 范数 趋于 13.4536(从 matlab 变量表格中得到)。
33
图 57: 7、9、11、13 迭代停止测试。
当 n=50 时,解 x*=[1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1, 1,1,1,1,1,1,1,1, 1,1,1,1,1,1,1,1,1,1] 判断矩阵:
图 58: 可以发现,没有发现负曲率的情况,第 1 和第 2 次的迭代到了边界,第 4、6、8、10、12、14、16 次 迭代到了边界。
▽f (x) = g = −400x1(x2 − x21) + 2x1 − 2
200(x2 − x21)
[
]
▽2f (x) = G = 1200x21 − 400x2 + 2 −400x1
−400x1
200
14
4.1 最速下降法
代码和流程图:
图 33:
图 34: 15
4.1.1 初始点为 (1.2,1.2)
++
)
x1 + x12 − 100
x11
x1
−
50 1
−
x2
−10 − µ(
++
)
x1 + x2 − 100 x2 −x1 + 50 + x2
北航最优化方法最新最全答案2015版详解
部分习题参考解答
刘红英 编
北京航空航天大学数学与系统科学学院 2015 年 5 月
内容简介
本书是《数学规划基础》(刘红英,夏勇,周水生,北京航空航天大学出版社,2012.10)的 配套教学辅导材料,较详细地给出了该教材各章后部分习题的参考解答.
前言
本习题解答自 2008 年春季开始编写,当时由硕士研究生阎凤玉提供部分习题解答, 经讨论和确认后,由作者首次录入排版. 后来陆续参加习题解答修订的硕士研究生包括王 浩、欧林鑫、朱丽媛、易彩霞和杨茜,其中的数值结果由欧林鑫提供. 作者在此向他们的 辛勤劳动表示衷心的感谢.
本解答得到了?项目的资助,在此表示感谢. 由于这些参考解答尚未经过特别严格的校对,仅供参考. 任何意见、建议或其它反馈 都可以发送至liuhongying@,在此深表感谢.
刘红英 2015.5 于北京
目录
第一章 引言
1
第二章 线性规划: 基本理论与方法
3
第三章 线性规划:应用及扩展
maximize 200x + 60y + 206z
subject to 3x + y + 5z ≤ 8000000
5x + y + 3z ≤ 5000000
x, y, z ≥ 0, 且 x, y, z 是整数.
忽略掉整性要求后,调用 Matlab 中的 linprog.m 函数求解,得最优解 x = 0, y = 500000, z = 1500000,自动满足整性要求.
(x)(∇ri
(x))T
2A(x)T A(x).
1.6 考虑向量值函数 f (x) : Rn → Rm ,设 f 的每个分量函数 fi(x) 在 x′ 都可微. 写出 f 在 x′ 的Taylor展式,请用 A(x)T 表示 ∇f (x)T (= [∇f1(x), · · · , ∇fm(x)]).
结构优化设计大作业(北航)

结构优化设计⼤作业(北航)《结构优化设计》⼤作业报告实验名称: 拓扑优化计算与分析1、引⾔⼤型的复杂结构诸如飞机、汽车中的复杂部件及桥梁等⼤型⼯程的设计问题,依靠传统的经验和模拟实验的优化设计⽅法已难以胜任,拓扑优化⽅法成为解决该问题的关键⼿段。
近年来拓扑优化的研究的热点集中在其⼯程应⽤上,如: ⽤拓扑优化⽅法进⾏微型柔性机构的设计,车门设计,飞机加强框设计,机翼前缘肋设计,卫星结构设计等。
在其具体的操作实现上有两种⽅法,⼀是采⽤计算机语⾔编程计算,该⽅法的优点是能最⼤限度的控制优化过程,改善优化过程中出现的诸如棋盘格现象等数值不稳定现象,得到较理想的优化结果,其缺点是计算规模过于庞⼤,计算效率太低;⼆是借助于商⽤有限元软件平台。
本⽂基于matlab 软件编程研究了不同边界条件平⾯薄板结构的在各种受⼒情况下拓扑优化,给出了⼏种典型结构的算例,并探讨了在实际优化中优化效果随各参数的变化,有助于初学者初涉拓扑优化的读者对拓扑优化有个基础的认识。
2、拓扑优化研究现状结构拓扑优化是近20年来从结构优化研究中派⽣出来的新分⽀,它在计算结构⼒学中已经被认为是最富挑战性的⼀类研究⼯作。
⽬前有关结构拓扑优化的⼯程应⽤研究还很不成熟,在国外处在发展的初期,尤其在国内尚属于起步阶段。
1904 年Michell在桁架理论中⾸次提出了拓扑优化的概念。
⾃1964 年Dorn等⼈提出基结构法,将数值⽅法引⼊拓扑优化领域,拓扑优化研究开始活跃。
20 世纪80 年代初,程耿东和N. Olhoff在弹性板的最优厚度分布研究中⾸次将最优拓扑问题转化为尺⼨优化问题,他们开创性的⼯作引起了众多学者的研究兴趣。
1988年Bendsoe和Kikuchi发表的基于均匀化理论的结构拓扑优化设计,开创了连续体结构拓扑优化设计研究的新局⾯。
1993年Xie.Y.M和Steven.G.P 提出了渐进结构优化法。
1999年Bendsoe 和Sigmund证实了变密度法物理意义的存在性。
北航最优化方法作业答案co_lcp
第 8 章 约束优化:线性约束规划
数学规划基础
LHY-SMSS-BUAA
线性等式约束规划
f (x) 是 n 元函数;ai 是 n 维常向量; bi 是常数 有解时 凸规划 ⊙ f(x) 是凸函数 KKT点即为全局极小点 f(x) 严格凸 :有唯一的极小点 ⊙ f(x) 是非凸函数 可能存在不是全局解的局部解 找全局解是NP-难问题 引入矩阵 ,使得 且 非奇异 解的情况: 无可行解、无界、有解
约束优化:线性约束规划
Constrained Optimization: Linearly Constrained Programming
第 8 章 约束优化:线性约束规划
数学规划基础
LHY-SMSS-BUAA
二次规划(quadratic programming)
G 是 n 阶对称方阵 d,ai 是 n 维常向量 解的情况:无可行解、无界、有解 有解时: ⊙ G半正定 KKT点即为全局极小点 凸规划 G 正 定 :有唯一的极小点 ⊙ G不定 可能存在不是全局解的局部解 找全局解是NP-难问题
第 8 章 约束优化:线性约束规划
数学规划基础
LHY-SMSS-BUAA
等式约束二次规划-广义消元法(续)
第 8 章 约束优化:线性约束规划
数学规划基础
LHY-SMSS-BUAA
第 8 章 约束优化:线性约束规划
数学规划基础
LHY-SMSS-BUAA
实用二次规划算法概述
⊙ 经典的积极集法(active-set methods)
有价证券的组合优化(续)
Markowitz引入风险容许参数(risk tolerance parameter)
找出“最优的”证券投资组合! ⊙ 参数 ,设定值依赖于投资者的个人偏好
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1流量工程问题1.1问题重述定义一个有向网络G=(N,E),其中N是节点集,E是弧集。
令A是网络G的点弧关联矩阵,即N×E阶矩阵,且第l列与弧里(I,j)对应,仅第i行元素为1,第j行元素为-1,其余元素为0。
再令bm =(bm1,…,bmN)T,fm=(fm1,…,fmE)T,则可将等式约束表示成:Af m=b m本算例为一经典TE算例。
算例网络有7个节点和13条弧,每条弧的容量是5个单位。
此外有四个需求量均为4个单位的源一目的对,具体的源节点、目的节点信息如图所示。
这里为了简单,省区了未用到的弧。
此外,弧上的数字表示弧的编号。
此时,c=((5,5 (5)1×13)T,根据上述四个约束条件,分别求得四个情况下的最优决策变量x=((x12,x13,…,x75)1×13)。
图 1 网络拓扑和流量需求1.27节点算例求解1.2.1\T)1.2.2算例1(b1=[4;-4;0;0;0;0;0]转化为线性规划问题:Minimize c T x1Subject to Ax1=b1x1>=0利用Matlab编写对偶单纯形法程序,可求得:最优解为x1*=[4 0 0 0 0 0 0 0 0 0 0 0 0]T对应的最优值c T x1=201.2.3算例2(b2=[4;0;-4;0;0;0;0]T)Minimize c T x2Subject to Ax2=b2\X2>=0利用Matlab编写对偶单纯形法程序,可求得:最优解为x2*=[0 4 0 0 0 0 0 0 0 0 0 0 0]T对应的最优值c T x2=201.2.4算例3(b3=[0;-4;4;0;0;0;0]T)Minimize c T x3Subject to Ax3=b3X3>=0利用Matlab编写对偶单纯形法程序,可求得:最优解为x3*=[4 0 0 0 4 0 0 0 0 0 0 0 0]T@对应的最优值c T x3=401.2.5算例4(b4=[4;0;0;0;0;0;-4]T)Minimize c T x4Subject to Ax4=b4X4>=0利用Matlab编写对偶单纯形法程序,可求得:最优解为x4*=[4 0 0 4 0 0 0 0 0 4 0 0 0]T对应的最优值c T x4=601.3计算结果及结果说明1.3.1算例1(b1=[4;-4;0;0;0;0;0]T)\算例1中,由b1可知,节点2为需求节点,节点1为供给节点,由节点1将信息传输至节点2的最短路径为弧1。
图 2 算例1最优传输示意图求得的最优解为x1*=[4 0 0 0 0 0 0 0 0 0 0 0 0]T,即只经过弧1运输4个单位流量,其余弧无流量。
又因为,每条弧的费用均为5,所以最小费用为20。
经分析,计算结果合理可信。
1.3.2算例2(b2=[4;0;-4;0;0;0;0]T)算例2中,由b2可知,节点3为需求节点,节点1为供给节点,由节点1将信息传输至节点2的最短路径为弧2。
图 3 算例2最优传输示意图求得的最优解为x2*=[0 4 0 0 0 0 0 0 0 0 0 0 0]T,即只经过弧2运输4个单位流量,其余弧无流量。
又因为,每条弧的费用均为5,所以最小费用为20。
经分析,计算结果合理可信。
1.3.3,T)1.3.4算例3(b3=[0;-4;4;0;0;0;0]算例3中,由b3可知,节点2为需求节点,节点3为供给节点,由节点3将信息传输至节点2的最短路径为弧5->弧1。
图 4 算例3最优传输示意图求得的最优解为x3*=[4 0 0 0 4 0 0 0 0 0 0 0 0]T,即经过弧5运输4个单位流量至节点1,再经弧1运输4个单位流量至节点2,其余弧无流量。
又因为,每条弧的费用均为5,所以最小费用为40。
经分析,计算结果合理可信。
1.3.5算例4(b4=[4;0;0;0;0;0;-4]T)算例4中,由b4可知,节点7为需求节点,节点1为供给节点,由节点1将信息传输至节点7的最短路径为弧1->弧4->弧10。
图 5 算例3最优传输示意图求得的最优解为x4*=[4 0 0 4 0 0 0 0 0 4 0 0 0]T,即经过弧1运输4个单位流量至节点2,再经弧4运输4个单位流量至节点5,最后经弧5运输4个单位流量至节点7,其余弧无流量。
又因为,每条弧的费用均为5,所以最小费用为60。
;经分析,计算结果合理可信。
2重要算法编写与观察2.1习题(a)初值为(0,0)时本算法令g的2范数在<10-4时,停止迭代,经过86次迭代收敛。
收敛因子(f(k+1)-f*)/(f(k)-f*)=图 6 收敛因子截图(b)初值为(,0)时本算法令g的2范数在<10-4时,停止迭代,经过112次迭代收敛。
·收敛因子(f(k+1)-f*)/(f(k)-f*)=图 7 收敛因子截图(c)初值为(10,0)时本算法令g的2范数在<10-4时,停止迭代,经过5次迭代收敛。
收敛因子(f(k+1)-f*)/(f(k)-f*)=图 8 收敛因子截图(d)初值为(11,0)时本算法令g的2范数在<10-4时,停止迭代,经过2次迭代收敛。
—收敛因子(f(k+1)-f*)/(f(k)-f*)= 0图 9 收敛因子截图图 10 自变量(x1,x2)截图总结:最速降线法的收敛因子随着初值的不同而变化,对于个别初值(如本习题初值取(11,0)时),算法可迅速收敛。
因此,初值的选取对于最速降线法的收敛速度有较大影响。
2.2 习题(a ) 由()94ln(7)f x x x =--可得:4'()97f x x =-- 24"()(7)f x x =-故,牛顿迭代法的确切公式为:—24974(7)x s x --=--(b )从以下五个初值开始迭代 (1)x(0)=表、(2)x(0)=表(3)x(0)=¥表(4)x(0)=表(5)x(0)=表(c)本问题的最优值为。
由上述五个初值点的前五步迭代可以看出:当初值点在区间(,)内时,第二次迭代点将落在(7,)之间,随后逐渐增加,直至逼近最优值。
当初值点在区间(7,)内时,则迭代点逐渐增加,逼近最优值。
当取初值不在(7,)内时,牛顿法不收敛。
2.3习题(a){(b)没有线搜索的牛顿法μ=时,μ=1时,(c)具有线搜索的牛顿法μ=时,μ=1时,,(未完成)2.4习题(a)初值选(,)时,最速降线法:本算法令g的2范数在<10-2时,停止迭代,经过3262次迭代得到以下结果。
图 11 最速降线法初值为(,)的等值线图及迭代轨迹牛顿法:本算法令s的4范数在<10-6时,停止迭代,经过4次迭代得到以下结果。
图 12 牛顿法初值为(,)的等值线图及迭代轨迹)(b)初值选(,1)时,最速降线法:本算法令g的4范数在<10-2时,停止迭代,经过6835次迭代得到以下结果。
图 13 最速降线法初值为(,1)的等值线图及迭代轨迹牛顿法:本算法令s的4范数在<10-6时,停止迭代,经过6次迭代得到以下结果。
图 14 牛顿法初值为(,1)的等值线图及迭代轨迹2.5[2.6习题N=5迭代6次后,满足收敛条件。
N=8迭代19次后,满足收敛条件。
N=14迭代49次后,满足收敛条件。
(表略)N=40迭代74次后,满足收敛条件。
(表略)2.7习题调用MATLAB自带的函数,计算可得对应的x(1)、x(2)和标准差如下表所示。
由上可知,标准差值较为恒定,随初值变化不十分显著;x1和x2值随初值选取的不同而不同。
2.8习题(未完成)3附录3.1对偶单纯形法函数MATLAB程序function [sol,val,kk]=duioudanchun(A,N)…B=A;[mA,nA]=size(A);kk=0;flag=1;while flagkk=kk+1;if A(:,nA)>=0flag=0;sol=zeros(1,nA);for i=1:mA-1sol(N(i))=A(i,nA);?endval=sol*(B(mA,:))';elsefor i=1:mA-1if A(i,nA)<0&A(i,1:nA-1)>=0 disp('have infinite solution!');flag=0;break;endendif flag^temp=0;for i=1:mA-1if A(i,nA)<temptemp=A(i,nA);outb=i;endendsita=zeros(1,nA-1);for i=1:nA-1if A(outb,i)<0sita(i)=A(mA,i)/A(outb,i);`endendtemp=-inf;for i=1:nA-1if sita(i)<0&sita(i)>temptemp=sita(i);inb=i;endendfor i=1:mA-1if i==outb、N(i)=inb;endendA(outb,:)=A(outb,:)/A(outb,inb);for i=1:mAif i~=outb A(i,:)=A(i,:)-A(outb,:)*A(i,inb);A(mA,nA)=0;endendend(endend3.2最速降线法求Rosenbrock函数最小值matlab程序如下:function rb = rbfun(x,y)rb=100*(y-x^2)^2+(1-x)^2endclearclcsyms x y g G》g=gradient(rb(x,y),[x y]) %定义梯度向量G=hessian(rb(x,y),[x y]) %定义海森阵X(1,:)=[ 1]; %定义初始点x=X(1,1);y=X(1,4);A(1,:)=subs(g) %给梯度赋初值i=1while(norm(A(i,:),4)>10^(-4)) %收敛条件f(i)=rb(x,y) %记录函数值P(i,:)=-A(i,:) %得到迭代方向<fz(i)=-A(i,:)*P(i,:)' %-gT*p %精确搜索法步长的分子fm(i)=P(i,:)*subs(G)*P(i,:)' %精确搜索法步长的分母a(i)=fz(i)/fm(i) %精确搜索法步长X(i+1,:) = X(i,:)+a(i)*P(i,:) %产生新的点x=X(i+1,1);y=X(i+1,4)A(i+1,:)=subs(g) %产生新的梯度i=i+1end3.3牛顿法求Rosenbrock函数最小值matlab程序如下:function rb = rbfun(x,y)rb=100*(y-x^2)^2+(1-x)^2endclearclcsyms x y g Gg=gradient(rb(x,y),[x y]) %定义梯度向量G=hessian(rb(x,y),[x y]) %定义海森阵X(1,:)=[ 1]; %定义初值x=X(1,1);y=X(1,4);A(1,:)=subs(g) %给梯度赋初值H=subs(inv(G)) %得到海森阵初值S(1,:)=-A(1,:)*H %得到s初值i=1while (norm(S(i,:),4)>10^(-6)) %收敛条件f(i)=rb(x,y) %定义函数值X(i+1,:) = X(i,:)+S(i,:) %得到下一迭代点x=X(i+1,1);y=X(i+1,4) %给x,y分别赋值A(i+1,:)=subs(g) %得到新的梯度值H=subs(inv(G)) %得到新的海森阵S(i+1,:)=-A(i+1,:)*H %得到新的增量si=i+1end3.4共轭梯度法求解习题程序如下:clearclcK=40G=zeros(K,K)for m = 1: Kfor n = 1: KG(m,n)=1/(m+n-1)endendX(1,:)=zeros(1,K)b=ones(1,K)A(1,:)=X(1,:)*G-bP(1,:)=-A(1,:)i=1while (norm(A(i,:),4)>10^(-6)) %收敛条件d=P(i,:)*Gfz(i)=A(i,:)*A(i,:)' %精确搜索法步长的分子fm(i)=P(i,:)*d' %精确搜索法步长的分母a(i)=fz(i)/fm(i) %精确搜索法步长X(i+1,:) = X(i,:)+a(i)*P(i,:) %产生新的点A(i+1,:)=A(i,:)+a(i)*dbeta(i+1)=(A(i+1,:)*A(i+1,:)')/(A(i,:)*A(i,:)')P(i+1,:)=-A(i+1,:)+beta(i+1)*P(i,:)i=i+1end。