北航最优化方法大作业参考
北航最优化方法大作业参考
1 流量工程问题1.1 问题重述定义一个有向网络G=(N,E),其中N是节点集,E是弧集。
令A是网络G的点弧关联矩阵,即N×E阶矩阵,且第l列与弧里(I,j)对应,仅第i行元素为1,第j行元素为-1,其余元素为0。
再令b m=(b m1,…,b mN)T,f m=(f m1,…,f mE)T,则可将等式约束表示成:Af m=b m本算例为一经典TE算例。
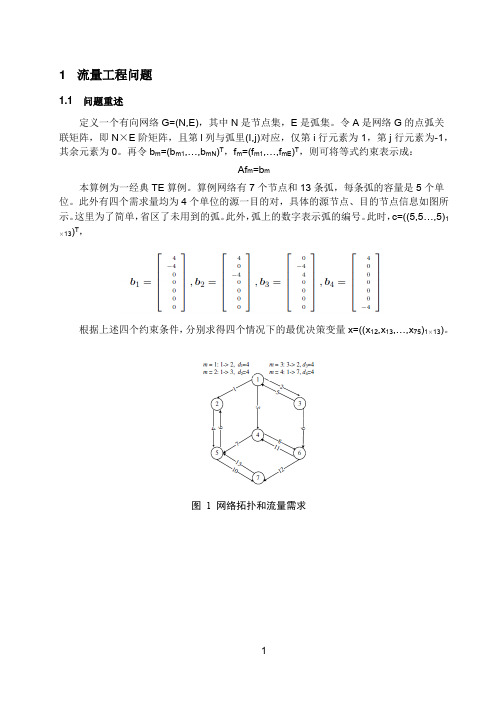
算例网络有7个节点和13条弧,每条弧的容量是5个单位。
此外有四个需求量均为4个单位的源一目的对,具体的源节点、目的节点信息如图所示。
这里为了简单,省区了未用到的弧。
此外,弧上的数字表示弧的编号。
此时,c=((5,5…,5)1 )T,×13)。
根据上述四个约束条件,分别求得四个情况下的最优决策变量x=((x12,x13,…,x75)1×13图 1 网络拓扑和流量需求1.2 7节点算例求解1.2.1 算例1(b1=[4;-4;0;0;0;0;0]T)转化为线性规划问题:Minimize c T x1Subject to Ax1=b1x1>=0利用Matlab编写对偶单纯形法程序,可求得:最优解为x1*=[4 0 0 0 0 0 0 0 0 0 0 0 0]T对应的最优值c T x1=201.2.2 算例2(b2=[4;0;-4;0;0;0;0]T)Minimize c T x2Subject to Ax2=b2X2>=0利用Matlab编写对偶单纯形法程序,可求得:最优解为x2*=[0 4 0 0 0 0 0 0 0 0 0 0 0]T对应的最优值c T x2=201.2.3 算例3(b3=[0;-4;4;0;0;0;0]T)Minimize c T x3Subject to Ax3=b3X3>=0利用Matlab编写对偶单纯形法程序,可求得:最优解为x3*=[4 0 0 0 4 0 0 0 0 0 0 0 0]T对应的最优值c T x3=401.2.4 算例4(b4=[4;0;0;0;0;0;-4]T)Minimize c T x4Subject to Ax4=b4X4>=0利用Matlab编写对偶单纯形法程序,可求得:最优解为x4*=[4 0 0 4 0 0 0 0 0 4 0 0 0]T对应的最优值c T x4=601.3 计算结果及结果说明1.3.1 算例1(b1=[4;-4;0;0;0;0;0]T)算例1中,由b1可知,节点2为需求节点,节点1为供给节点,由节点1将信息传输至节点2的最短路径为弧1。
北航最优化大作业
北航最优化大作业1.引言旅行商问题(Traveling Salesman Problem,TSP)是一种经典的组合优化问题,目标是找到一条路径,使得旅行商从起点出发,途经所有城市一次后返回起点,并且总路径长度最短。
TSP问题具有NP-hard的特性,寻找最优解是一个非常具有挑战性的任务。
本文将基于禁忌算法,探讨TSP问题的求解方法。
2.禁忌算法简介禁忌算法是一种基于局部的元启发式算法,通过在过程中禁止一定的动作来跳出局部最优解,以期望获得更好的全局最优解。
算法通过引入禁忌表和禁忌长度等机制,避免过程中陷入局部最优解。
3.TSP问题的数学建模假设有n个城市,城市之间的距离可以表示为一个n×n的距离矩阵D。
TSP问题的目标可以定义为:min ∑_(i=1)^n ∑_(j=1)^(n) D_ij*x_ijs.t. ∑_(i=1)^n x_ij=1,∑_(j=1)^n x_ij=1,∀i ≠ jx_ij∈{0,1}, 1≤i,j≤n其中x_ij表示城市i与城市j之间的路径是否存在,1表示存在,0表示不存在。
4.禁忌算法在TSP问题中的应用(1)初始化选取一个起始解x,计算其路径长度f(x)。
将x设为当前解x_best,将f(x)设为当前解的最优值f_best。
(2)选择邻域解选择当前解的一个邻域解x',使得x'与x只有一个位置上的交换。
通过随机选择两个位置,进行交换操作。
(3)禁忌判断如果邻域解x'的路径长度f(x')小于当前解的最优值f_best,则更新f_best为f(x'),并将x'设为新的当前解。
否则,比较x'与当前解的禁忌情况。
(4)禁忌更新如果x'未在禁忌表中,或者禁忌表中对应的禁忌周期已过,则将x'设为新的当前解。
否则,选择一个路径长度较短的邻域解x'',即使其路径长度f(x'')大于f_best。
北航最优化大作业
图 18: 前两行为迭代点 xk, 后面一行为梯度的 2 范数,显然,前两行行都趋于无穷大,发散,梯度的 2 范数 趋于 13.4536(从 matlab 变量表格中得到)。 4: 初始点 x(0) = (10, 20)T 前两行为迭代点 xk, 后面一行为梯度的 2 范数,显然,前两行行都趋于无穷大,发散,梯度的 2 范数 趋于 13.4536(从 matlab 变量表格中得到)。
33
图 57: 7、9、11、13 迭代停止测试。
当 n=50 时,解 x*=[1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1, 1,1,1,1,1,1,1,1, 1,1,1,1,1,1,1,1,1,1] 判断矩阵:
图 58: 可以发现,没有发现负曲率的情况,第 1 和第 2 次的迭代到了边界,第 4、6、8、10、12、14、16 次 迭代到了边界。
▽f (x) = g = −400x1(x2 − x21) + 2x1 − 2
200(x2 − x21)
[
]
▽2f (x) = G = 1200x21 − 400x2 + 2 −400x1
−400x1
200
14
4.1 最速下降法
代码和流程图:
图 33:
图 34: 15
4.1.1 初始点为 (1.2,1.2)
++
)
x1 + x12 − 100
x11
x1
−
50 1
−
x2
−10 − µ(
++
)
x1 + x2 − 100 x2 −x1 + 50 + x2
北航最优化方法作业答案co_lcp
第 8 章 约束优化:线性约束规划
数学规划基础
LHY-SMSS-BUAA
线性等式约束规划
f (x) 是 n 元函数;ai 是 n 维常向量; bi 是常数 有解时 凸规划 ⊙ f(x) 是凸函数 KKT点即为全局极小点 f(x) 严格凸 :有唯一的极小点 ⊙ f(x) 是非凸函数 可能存在不是全局解的局部解 找全局解是NP-难问题 引入矩阵 ,使得 且 非奇异 解的情况: 无可行解、无界、有解
约束优化:线性约束规划
Constrained Optimization: Linearly Constrained Programming
第 8 章 约束优化:线性约束规划
数学规划基础
LHY-SMSS-BUAA
二次规划(quadratic programming)
G 是 n 阶对称方阵 d,ai 是 n 维常向量 解的情况:无可行解、无界、有解 有解时: ⊙ G半正定 KKT点即为全局极小点 凸规划 G 正 定 :有唯一的极小点 ⊙ G不定 可能存在不是全局解的局部解 找全局解是NP-难问题
第 8 章 约束优化:线性约束规划
数学规划基础
LHY-SMSS-BUAA
等式约束二次规划-广义消元法(续)
第 8 章 约束优化:线性约束规划
数学规划基础
LHY-SMSS-BUAA
第 8 章 约束优化:线性约束规划
数学规划基础
LHY-SMSS-BUAA
实用二次规划算法概述
⊙ 经典的积极集法(active-set methods)
有价证券的组合优化(续)
Markowitz引入风险容许参数(risk tolerance parameter)
找出“最优的”证券投资组合! ⊙ 参数 ,设定值依赖于投资者的个人偏好
最优化方法与应用大作业(一)最速下降法
最优化方法与应用大作业(一)
---最速下降法部分:
1.问题描述:
用梯度下降法求解以下优化问题
min f(x)=(x1+10*x2)^2+5(x3-x4)^2+(x2-2*x3)^4+10*(x1-x4)^4
2.编程感想:
该算法需要计算Hesse矩阵,C语言在向量运算时没有Matlab方便,所以手工完成了理论计算,再输入,破坏了程序的移植性。
同时,实验表明当初始值离理想点较远且精度要求较高时,最速下降法的收敛速率极慢,迭代几乎不可能完成,这对初值的选取提出了一定限制。
3.结果分析:
编译界面(Mac os X,Xcode环境)
输入参数(设定为(0.1,0.2,0.3,0.4)):
结果(此处列出每次迭代结果)。
明显的看到,最速下降法的收敛较慢,最终结果接近理论值(F(0,0,0,0)=0)所以该结果可以满意。
4.算法代码见下页
西安电子科技大学电子工程学院020951
李骏昊02095005。
最优化大作业2
最优化大作业2⚫姓名:cxf⚫班级学号:****20****⚫学院:******学院⚫选择方式:方式4——撰写课程小论文⚫题目来源:附录二备选问题(计算机通信网)中文献[9]——F. Kelly. The Mathematics of Traffic in Network. Princeton University Press, 2005.⚫工作方式:独立完成⚫完成时间:2020年12月15日交通网络中的数学优化问题研究cxf(北京航空航天大学 ******学院, 北京 100191)摘要 由于交通网络流中分散控制的程度差异,人们往往需要寻求一种解决方案对系统进行继续扩展和优化。
车流量控制问题一直是交通网络所面临的重要挑战,也是研究者研究的重点。
本论文用微积分来描述拥堵如何依赖于车流量,以Wardrop 均衡和Braess’s 悖论等理论为基础,建立车流分配控制问题的数学模型,并利用Lingo 优化软件对原始问题进行求解。
最后,由优化模型的结果可知,当网络达到均衡状态时不一定是最优的车流分配方案,且达到最优解状态时能够使通信网络中的分散控制能够表现的更好。
但是,这最优方案需强制执行,否则自私车辆又会选择最短的路径,即形成新的均衡状态。
关键词 交通网络,车流分配, Wardrop 均衡, 优化模型.1.问题背景许多网络中都普遍存在着拥堵现象,其拥堵的发生方式和原因不尽相同。
然而,流量通过网络的流动方式是不同用户之间微妙而复杂交互的结果。
例如,在交通网络中,每位驾驶员都会尝试选择最方便的路径,以便节省时间和开销,而这一选择将取决于驾驶员期望在不同道路上遇到的延迟,且这些延迟反过来取决于其他人对路径的选择。
这种相互依赖关系,使得人们很难预测系统变化的影响,例如建造新的道路或在某地方实行收费等。
在电话网、互联网和交通网等大型网络系统中,主要的实际问题就是控制权的分散程度不同。
发展至今,这种分散式节点之间的流量控制方法已经显示出紧张的迹象,如果网络作为一个整体要继续扩展和进化,则需要进一步优化网络流量控制。
最优化方法大作业模板
命题人:审核人:大作业学期:至学年度第学期课程:最优化方法课程代号:签到序号:使用班级:姓名:学号:题号一二三四五六七八九十总分得分一、(目标1)请从以下6种算法中任选一种,说明算法的来源、定义、基本思想和优缺点,并给出算法步骤(包含算法流程图)和例子(包含程序与运算结果)。
①禁忌搜索算法;②模拟退火算法;③遗传算法;④神经网络算法;⑤粒子群算法;⑥蚁群算法。
二、(目标1)某工厂生产甲、乙两种产品,已知生产这两种产品需要消耗三种材料A 、B 和C ,其中生产过程中材料的单位产品消耗量和总量,以及单位产品的利润如下表所示。
该如何配置安排生产计划,使得工厂所获得的利润最大?材料甲乙资源总量材料A (Kg )3265材料B (Kg )2140材料C (Kg )0375单位利润(元/件)15002500-(1)要保证工厂利润的最大化,写出相应的生产计划数学模型;(2)根据对偶理论,直接写出该线性规划的对偶问题;(3)采用单纯形表法对该该线性规划问题进行求解,写出详细的计算过程;(4)采用Matlab 软件对该线性规划问题进行求解,写出完整的源程序,并给出程序运行结果;(5)讨论当材料B 的资源总量发生变化时,该线性规划问题的最优解会如何变化?课程目标目标1……题号一、二、三、四、五……分值20、25、20、20、15……得分得分三、(目标1)求解下列无约束非线性规划问题(1)采用黄金分割法求解:min 4()24f x x x =++。
初始区间为[-1.0],精度为ε=10-4。
(要求:采用黄金分割法进行Matlab 编程求解,写出源程序,并给出运行结果,列出迭代过程的数据表格)(2)采用阻尼牛顿法求解:222121212min (,)4f x x x x x x =+-。
分别取两个初始点:x A =(1,1)T ,x B =(3,4)T 。
(要求:采用阻尼牛顿法进行Matlab 编程求解,并给出运行结果,列出迭代过程的数据表格)四、(目标1)求解下列约束非线性规划问题:22112212121212min ()23532..00f x x x x x x x x x x x s t x x =-+--+≤⎧⎪-≤⎪⎨≥⎪⎪≥⎩(1)采用罚函数法进行求解,需写出具体计算过程;(2)采用二次规划方法进行求解,需写出具体计算过程,并进行MATLAB 编程,写出源程序和运算结果;五、(目标1)(1)某商店在未来的4个月里,准备利用它的一个仓库来专门经营某种商品,仓库的最大容量为1000单位,而且该商店每月只能出卖仓库现有的货。
北航机械优化大作业
现代机械优化设计授课老师:王春洁2014-12-17目录第一部分一、一维优化方法 (2)1. 进退法 (2)2. 格点法 (2)3. 牛顿法 (2)4. 二次插值 (3)应用原则: (4)二、多维无约束优化 (4)1. 梯度法 (4)2. 二阶牛顿法与阻尼牛顿法 (5)3. DFP变尺度法 (6)4. 单纯形法 (6)三、多维约束优化 (6)1. 随机方向搜索法 (8)2. 可行方向法 (8)3. 惩罚函数法 (8)第二部分一、采用有约束多维优化方法解决箱梁模板的设计问题 (10)问题的描述 (11)多维约束优化 (14)总结与致谢 (18)参考文献 (19)第一部分本部分为简述学过的优化算法(一维,多维无约束,多维有约束)的选择方法及应用原则。
一、 一维优化方法1. 进退法由单峰函数的性质可知,在极小点m x 左边函数值应严格下降,而在极小值右边函数值应严格上升。
因此,可从某一个给定的初始点0x 出发,以初始步长0h 沿着函数值的下降方向,逐步前进(或后退),直至找到相继的3个试点的函数值按“高---低---高”变化为止。
2. 格点法格点法是一种计算极其方便的方法,其迭代步骤可简要概括为把搜索区间等分成n 个点12,,n x x x …,,计算各个点对应的数值,取出函数值最小的点的横坐标m x ,之后,在m x 两侧取临点11,m m x x -+,作为新的区间并判断11m m x x eps +--<是否成立,倘若成立,则m x 就是最优解,对应的函数值m y 即为最优值;若不成立则以11[]m m x x -+为新区间重复以上过程直到满足条件为止。
3. 牛顿法牛顿法是用切线代替弧,逐渐逼近函数根值的方法。
当目标函数()f x 有一阶连续导数并且二阶导数大于零时,在曲线'()y f x =上作一系列切线,使之与x 轴的脚垫(0)(1)(2)(3),,,......x x x x 逐渐趋于'()0f x =的根*x 。
《最优化方法》参考答案及评分标准
《最优化方法》参考答案及评分标准1. 某文教用品厂用原材料白坯纸生产原稿纸、日记本和练习本三种产品。
该厂现有工人100人,每月白坯纸供应量为30 000 kg.已知工人的劳动生产率为:每人每月可生产原稿纸30捆,或生产日记本30打,或练习本30箱。
已知原材料消耗为:每捆原稿纸用白坯纸133kg,每打日记本用白坯纸1133kg,每箱练习本用白坯纸2263kg.又知每生产一捆原稿纸可获利2元,生产一打日记本获利3元,生产一箱练习本获利1元。
试确定:(a)现有生产条件下获利最大的方案;(b)如白坯纸的供应数量不变,当工人数不足时可招收临时工,临时工工资支出为每人每月40元,则该厂要不要招收临时工,招多少临时工最合适? 解:(a )分别用123,,x x x 代表原稿纸、日记本和练习本的每月生产量。
(2分) 建立线性规划模型(4分)⎪⎪⎩⎪⎪⎨⎧≥≤++≤++++0,3000038034031010030/30/30/32max 32,1321321321x x x x x x x x x x x x (b )临时工影子价格高于市场价格,故应招收。
用参数规划计算确定招200人为最适宜。
(5分)2. 求解下列产销平衡的运输问题,表中列出的为产地到销地之间的运价。
(1)用左上角法、最小元素法、沃格尔法求初始基本可行解。
(2)由上面所得的初始方案出发,应用表上作业法求最优方案,并比较初始方案需要的迭代次解:3. 用动态规划求解下面的问题解:(1)建立动态规划模型:①阶段变量k=1,2,3。
(1分) ②状态变量s k 表示第k 阶段初各决策变量之积,则s 3=27。
(1分) ③决策变量x k 分别表示第k 阶段的x 的值 (1分) ④状态转移方程s k+1=s k /x k 。
(1分) ⑤指标函数v k (s k ,x k )表示第k 阶段的总成本,即x 1+x 2+…+x k (1分)由已知可得k k k k x x s v =),((1分)⑥基本方程为⎪⎩⎪⎨⎧=+=++≤≤0)()}(),({max )(441160s f s f x s v s f k k k k k x k k k (2分) (2)用动态规划的正向或反向推理算法求解可得:(12分)()()9)(min 333321==x f x x x评分标准:以上的推理过程,每一阶段的计算正确得3分(共3个阶段),其中,列写出s 或x 的范围得1分,列写出决策表得1分,列写出最优决策表得1分,每出现一处错误,扣0.5分,至扣完本项分值为止。
北航最优化方法大作业参考
北航最优化方法大作业参考旅行商问题是一个经典的组合优化问题,目标是找到一条最短路径,使得旅行商能够在访问所有城市后回到起始城市。
在实际应用中,旅行商问题有着广泛的应用,例如物流配送、城市规划等领域。
为了解决旅行商问题,我们可以采用启发式算法,其中一个常用的方法是遗传算法。
遗传算法是一种模拟自然进化过程的优化算法,通过模拟生物遗传的选择、交叉和变异等操作,逐步优化问题的解。
首先,我们需要对问题进行建模。
假设有N个城市,我们可以通过一个N*N的距离矩阵来表示各个城市之间的距离。
同时,我们需要定义一个染色体表示一条路径,其中每个基因表示一个城市的编号。
接下来,我们可以采用遗传算法来求解最优解。
遗传算法一般包括以下几个步骤:1.初始化种群:随机生成初始的染色体种群,每个染色体都表示一条路径。
2.适应度评价:根据染色体的路径长度来评估每个染色体的适应度,路径越短适应度越高。
3.选择操作:选择适应度较高的染色体作为父代,采用轮盘赌选择算法确定父代。
4.交叉操作:采用部分映射交叉算子对父代进行交叉操作,生成新的子代。
5.变异操作:对子代进行变异操作,以增加种群的多样性。
6.环境选择:根据适应度选择下一代种群,同时保留精英个体,避免解的丢失。
7.终止条件:当达到预设的迭代次数或者达到最优解时,终止算法。
通过以上步骤的迭代,我们可以逐步优化路径的长度,最终得到一条最短路径。
除了遗传算法,我们还可以尝试其他的优化算法,例如模拟退火算法、蚁群算法等。
这些算法在求解旅行商问题时都有一定的优势和适用性。
总结起来,旅行商问题是一个经典的组合优化问题,在北航最优化方法大作业中可以选择使用启发式算法来解决。
我们可以尝试使用遗传算法来求解最优路径,并根据实际情况选择合适的算法参数和终止条件。
通过不断地迭代和优化,我们可以得到一条最短路径,满足旅行商的需求。
以上是关于北航最优化方法大作业的参考内容,希望对你的写作有所帮助。
如果有其他疑问,欢迎继续提问。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
北航最优化方法大作业参考1 流量工程问题1.1 问题重述定义一个有向网络G=(N,E),其中N是节点集,E是弧集。
令A是网络G的点弧关联矩阵,即N×E阶矩阵,且第l列与弧里(I,j)对应,仅第i行元素为1,第j行元素为-1,其余元素为0。
再令b m=(b m1,…,b mN)T,f m=(f m1,…,f mE)T,则可将等式约束表示成:Af m=b m本算例为一经典TE算例。
算例网络有7个节点和13条弧,每条弧的容量是5个单位。
此外有四个需求量均为4个单位的源一目的对,具体的源节点、目的节点信息如图所示。
这里为了简单,省区了未用到的弧。
此外,弧上的数字表示弧的编号。
此时,c=((5,5…,5)1 )T,×13根据上述四个约束条件,分别求得四个情况下的最优决策变量x=((x12,x13,…,x75)1×)。
13图 1 网络拓扑和流量需求1.2 7节点算例求解1.2.1 算例1(b1=[4;-4;0;0;0;0;0]T)转化为线性规划问题:Minimize c T x1Subject to Ax1=b1x1>=0 利用Matlab编写对偶单纯形法程序,可求得:最优解为x1*=[4 0 0 0 0 0 0 0 0 0 0 0 0]T对应的最优值c T x1=201.2.2 算例2(b2=[4;0;-4;0;0;0;0]T)Minimize c T x2Subject to Ax2=b2X2>=0 利用Matlab编写对偶单纯形法程序,可求得:最优解为x2*=[0 4 0 0 0 0 0 0 0 0 0 0 0]T对应的最优值c T x2=201.2.3 算例3(b3=[0;-4;4;0;0;0;0]T)Minimize c T x3Subject to Ax3=b3X3>=0 利用Matlab编写对偶单纯形法程序,可求得:最优解为x3*=[4 0 0 0 4 0 0 0 0 0 0 0 0]T对应的最优值c T x3=401.2.4 算例4(b4=[4;0;0;0;0;0;-4]T)Minimize c T x4Subject to Ax4=b4X4>=0利用Matlab编写对偶单纯形法程序,可求得:最优解为x4*=[4 0 0 4 0 0 0 0 0 4 0 0 0]T对应的最优值c T x4=601.3 计算结果及结果说明1.3.1 算例1(b1=[4;-4;0;0;0;0;0]T)算例1中,由b1可知,节点2为需求节点,节点1为供给节点,由节点1将信息传输至节点2的最短路径为弧1。
图 2 算例1最优传输示意图求得的最优解为x1*=[4 0 0 0 0 0 0 0 0 0 0 0 0]T,即只经过弧1运输4个单位流量,其余弧无流量。
又因为,每条弧的费用均为5,所以最小费用为20。
经分析,计算结果合理可信。
1.3.2 算例2(b2=[4;0;-4;0;0;0;0]T)算例2中,由b2可知,节点3为需求节点,节点1为供给节点,由节点1将信息传输至节点2的最短路径为弧2。
图 3 算例2最优传输示意图求得的最优解为x2*=[0 4 0 0 0 0 0 0 0 0 0 0 0]T,即只经过弧2运输4个单位流量,其余弧无流量。
又因为,每条弧的费用均为5,所以最小费用为20。
经分析,计算结果合理可信。
1.3.3 算例3(b3=[0;-4;4;0;0;0;0]T)算例3中,由b3可知,节点2为需求节点,节点3为供给节点,由节点3将信息传输至节点2的最短路径为弧5->弧1。
图 4 算例3最优传输示意图求得的最优解为x3*=[4 0 0 0 4 0 0 0 0 0 0 0 0]T,即经过弧5运输4个单位流量至节点1,再经弧1运输4个单位流量至节点2,其余弧无流量。
又因为,每条弧的费用均为5,所以最小费用为40。
经分析,计算结果合理可信。
1.3.4 算例4(b4=[4;0;0;0;0;0;-4]T)算例4中,由b4可知,节点7为需求节点,节点1为供给节点,由节点1将信息传输至节点7的最短路径为弧1->弧4->弧10。
图 5 算例3最优传输示意图求得的最优解为x4*=[4 0 0 4 0 0 0 0 0 4 0 0 0]T,即经过弧1运输4个单位流量至节点2,再经弧4运输4个单位流量至节点5,最后经弧5运输4个单位流量至节点7,其余弧无流量。
又因为,每条弧的费用均为5,所以最小费用为60。
经分析,计算结果合理可信。
2 重要算法编写与观察2.1 习题5.6(a)初值为(0,0)时本算法令g的2范数在<10-4时,停止迭代,经过86次迭代收敛。
收敛因子(f(k+1)-f*)/(f(k)-f*)=0.7623图 6 收敛因子截图(b)初值为(-0.4,0)时本算法令g的2范数在<10-4时,停止迭代,经过112次迭代收敛。
收敛因子(f(k+1)-f*)/(f(k)-f*)=0.81图7 收敛因子截图(c)初值为(10,0)时本算法令g的2范数在<10-4时,停止迭代,经过5次迭代收敛。
收敛因子(f(k+1)-f*)/(f(k)-f*)=3.9022e-4图8 收敛因子截图(d)初值为(11,0)时本算法令g的2范数在<10-4时,停止迭代,经过2次迭代收敛。
收敛因子(f(k+1)-f*)/(f(k)-f*)= 0图9 收敛因子截图图10 自变量(x1,x2)截图总结:最速降线法的收敛因子随着初值的不同而变化,对于个别初值(如本习题初值取(11,0)时),算法可迅速收敛。
因此,初值的选取对于最速降线法的收敛速度有较大影响。
2.2 习题5.7(a ) 由()94ln(7)f x x x =--可得:4'()97f x x =-- 24"()(7)f x x =- 故,牛顿迭代法的确切公式为:24974(7)x s x --=-- (b )从以下五个初值开始迭代 (1)x(0)=7.40(2)x(0)=7.20(3)x(0)=7.01(4)x(0)=7.80(5)x(0)=7.88(c)本问题的最优值为7.4444444。
由上述五个初值点的前五步迭代可以看出:当初值点在区间(7.4444444,7.8888)内时,第二次迭代点将落在(7,7.4444444)之间,随后逐渐增加,直至逼近最优值。
当初值点在区间(7,7.4444444)内时,则迭代点逐渐增加,逼近最优值。
当取初值不在(7,7.8888)内时,牛顿法不收敛。
2.3 习题5.8(a)没有线搜索的牛顿法μ=0.1时,μ=1时,(b)具有线搜索的牛顿法μ=0.1时,μ=1时,(未完成)2.4 习题5.9(a)初值选(1.2,1.2)时,◆最速降线法:本算法令g的2范数在<10-2时,停止迭代,经过3262次迭代得到以下结果。
图11 最速降线法初值为(1.2,1.2)的等值线图及迭代轨迹◆牛顿法:本算法令s的4范数在<10-6时,停止迭代,经过4次迭代得到以下结果。
图12 牛顿法初值为(1.2,1.2)的等值线图及迭代轨迹(b)初值选(-1.2,1)时,最速降线法:本算法令g的4范数在<10-2时,停止迭代,经过6835次迭代得到以下结果。
图13 最速降线法初值为(-1.2,1)的等值线图及迭代轨迹牛顿法:本算法令s的4范数在<10-6时,停止迭代,经过6次迭代得到以下结果。
图14 牛顿法初值为(-1.2,1)的等值线图及迭代轨迹2.5 习题5.19N=5迭代6次后,满足收敛条件。
N=8迭代19次后,满足收敛条件。
N=14迭代49次后,满足收敛条件。
(表略)N=40迭代74次后,满足收敛条件。
(表略)2.6 习题5.27调用MATLAB自带的lsqnonlin.m函数,计算可得对应的x(1)、x(2)和标准差如下表所示。
由上可知,标准差值较为恒定,随初值变化不十分显著;x1和x2值随初值选取的不同而不同。
2.7 习题6.4(未完成)3 附录3.1 对偶单纯形法函数MATLAB程序function [sol,val,kk]=duioudanchun(A,N)B=A;[mA,nA]=size(A);kk=0;flag=1;while flagkk=kk+1;if A(:,nA)>=0flag=0;sol=zeros(1,nA);for i=1:mA-1sol(N(i))=A(i,nA);endval=sol*(B(mA,:))';elsefor i=1:mA-1if A(i,nA)<0&A(i,1:nA-1)>=0disp('have infinite solution!');flag=0;break;endendif flagtemp=0;for i=1:mA-1if A(i,nA)<temptemp=A(i,nA);outb=i;endendsita=zeros(1,nA-1);for i=1:nA-1if A(outb,i)<0sita(i)=A(mA,i)/A(outb,i);endendtemp=-inf;for i=1:nA-1if sita(i)<0&sita(i)>temptemp=sita(i);inb=i;endendfor i=1:mA-1if i==outbN(i)=inb;endendA(outb,:)=A(outb,:)/A(outb,inb);for i=1:mAif i~=outbA(i,:)=A(i,:)-A(outb,:)*A(i,inb);A(mA,nA)=0;endendendendend3.2 最速降线法求Rosenbrock函数最小值matlab程序如下:function rb = rbfun(x,y)rb=100*(y-x^2)^2+(1-x)^2endclearclcsyms x y g Gg=gradient(rb(x,y),[x y]) %定义梯度向量G=hessian(rb(x,y),[x y]) %定义海森阵X(1,:)=[-1.4 1]; %定义初始点x=X(1,1);y=X(1,4);A(1,:)=subs(g) %给梯度赋初值i=1while(norm(A(i,:),4)>10^(-4)) %收敛条件f(i)=rb(x,y) %记录函数值P(i,:)=-A(i,:) %得到迭代方向fz(i)=-A(i,:)*P(i,:)' %-gT*p %精确搜索法步长的分子fm(i)=P(i,:)*subs(G)*P(i,:)' %精确搜索法步长的分母a(i)=fz(i)/fm(i) %精确搜索法步长X(i+1,:) = X(i,:)+a(i)*P(i,:) %产生新的点x=X(i+1,1);y=X(i+1,4)A(i+1,:)=subs(g) %产生新的梯度i=i+1end3.3 牛顿法求Rosenbrock函数最小值matlab程序如下:function rb = rbfun(x,y)rb=100*(y-x^2)^2+(1-x)^2endclearclcsyms x y g Gg=gradient(rb(x,y),[x y]) %定义梯度向量G=hessian(rb(x,y),[x y]) %定义海森阵X(1,:)=[-1.4 1]; %定义初值x=X(1,1);y=X(1,4);A(1,:)=subs(g) %给梯度赋初值H=subs(inv(G)) %得到海森阵初值S(1,:)=-A(1,:)*H %得到s初值i=1while (norm(S(i,:),4)>10^(-6)) %收敛条件f(i)=rb(x,y) %定义函数值X(i+1,:) = X(i,:)+S(i,:) %得到下一迭代点x=X(i+1,1);y=X(i+1,4) %给x,y分别赋值A(i+1,:)=subs(g) %得到新的梯度值H=subs(inv(G)) %得到新的海森阵S(i+1,:)=-A(i+1,:)*H %得到新的增量s i=i+1end3.4 共轭梯度法求解习题5.19程序如下:clearclcK=40G=zeros(K,K)for m = 1: Kfor n = 1: KG(m,n)=1/(m+n-1)endendX(1,:)=zeros(1,K)b=ones(1,K)A(1,:)=X(1,:)*G-bP(1,:)=-A(1,:)i=1while (norm(A(i,:),4)>10^(-6)) %收敛条件d=P(i,:)*Gfz(i)=A(i,:)*A(i,:)' %精确搜索法步长的分子fm(i)=P(i,:)*d' %精确搜索法步长的分母a(i)=fz(i)/fm(i) %精确搜索法步长X(i+1,:) = X(i,:)+a(i)*P(i,:) %产生新的点A(i+1,:)=A(i,:)+a(i)*dbeta(i+1)=(A(i+1,:)*A(i+1,:)')/(A(i,:)*A(i,:)')P(i+1,:)=-A(i+1,:)+beta(i+1)*P(i,:)i=i+1end。