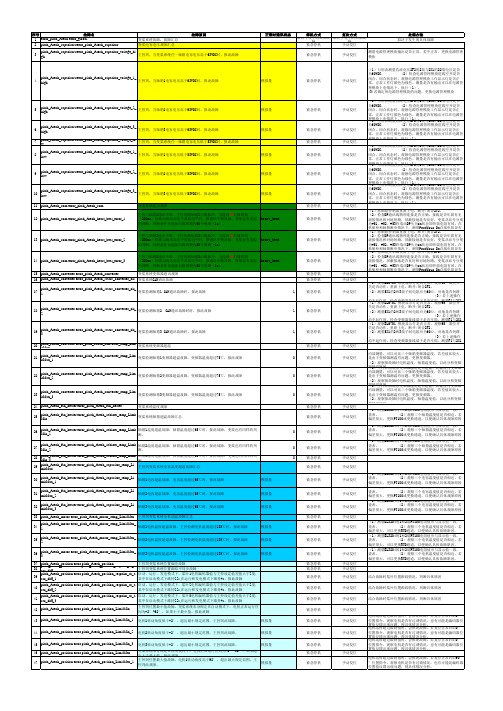
MOOG变桨故障诊断
moog变桨安全链断开原因查找步骤

表 1 驱动器错误故障表
Author:MOOG Service
Date:6/4/2010
MOOG
Pitchsystem
Analysis
Date: Page: 2 of 4
12
Date: Page: 3 of 4
1=0 度被定义 0=0 度没有被定义 1=正常工作 0=不正常工作 1=主编码器正常 0=主编器错误
1=跟踪正常 0=跟踪不正常,即实际位置与控 制位置之差大于 2 度
回信号,系统进入模式 2/3
0=要求主控断开安全链
0=要求主控断开安全链, 随后变桨自身安全链断开 0=要求主控断开安全链, 随后变桨自身安全链断开
变桨控制器每 150ms 向 所有驱动器发送一次心跳 信号,如果驱动器没有返
Author:MOOG Service
Date:6/4/2010
MOOG
Pitchsystem
Analysis
定义桨叶 0 度位置定义
1
8
驱动器 PLC 正常情况 9
主编码器故障 10
跟踪情况(桨叶实际位 11 置跟踪控制位置情况)
Author:MOOG Service
Date:6/4/2010
3
24
状态
25 驱动器模拟输入 ISA00 未使用 状态
驱动器模拟输入 ISA01 未使用 26
状态
27
28
29
30
31
Date: Page: 4 of 4
随后变桨自身安全链断开
检查此类故障可以通过主控监测查看安全链断开前后 5min 内各个工作状态和 I/O 信号点状态是否有 变化,根据变化点可以把故障缩小到较小范围,再查找并排除故障,故障消除后安全链断开问题即可得 到解决。
基于深度学习的风电机组变桨系统故障诊断研究

基于深度学习的风电机组变桨系统故障诊断研究基于深度学习的风电机组变桨系统故障诊断研究摘要:风电机组的变桨系统是保证风能转化成电能的关键设备之一。
然而,由于其复杂的结构和工作环境,变桨系统容易出现各种故障,降低了其可靠性和效率。
针对这一问题,本文提出了一种基于深度学习的风电机组变桨系统故障诊断方法。
首先,通过数据采集系统收集风电机组变桨系统的实时数据,并对其进行预处理和特征提取。
然后,建立深度神经网络模型,利用提取的特征进行训练。
最后,通过对测试数据进行预测和故障识别,实现变桨系统的故障诊断。
1. 引言随着人们对可再生能源的关注度日益提高,风能作为一种清洁、可再生的能源得到了广泛应用。
风电机组作为转化风能的主要设备,其可靠性和效率对电网运行有着重要影响。
而风电机组的变桨系统作为风能转换的关键环节之一,负责调整叶片角度,使其能够迎风转动。
然而,由于其特殊的工作环境和频繁的运行,变桨系统容易出现各种故障,如叶片剧烈振动、传动系统故障等,严重影响了风电机组的可靠性和功率输出。
2. 相关工作目前,针对风电机组变桨系统的故障诊断,研究者们已提出了一些方法。
其中,基于物理模型的方法通过建立风电机组的数学模型,利用模型与实际数据的对比来诊断故障。
然而,由于变桨系统存在复杂非线性和环境干扰等因素,单纯依赖物理模型往往难以准确诊断故障。
基于统计模型的方法则利用统计方法对变桨系统的数据进行分析,通过特征提取和判别模型来实现故障诊断。
然而,这种方法依赖于所选判别模型的准确性和特征提取的有效性,对数据的要求较高。
因此,需要一种能够从大量数据中学习特征并实现准确故障诊断的方法。
3. 方法本文提出了一种基于深度学习的风电机组变桨系统故障诊断方法。
首先,通过数据采集系统收集风电机组变桨系统的实时数据,包括电流、转速、振动等多个变量。
然后,对采集到的数据进行预处理,包括数据清洗、归一化等,以减小数据的噪声和干扰。
接下来,对预处理后的数据进行特征提取,利用时域特征、频域特征等方法从数据中提取故障相关的特征。
基于mcODM-STA的风电机组变桨系统故障诊断

基于mcODM-STA的风电机组变桨系统故障诊断作者:唐明珠匡子杰吴华伟胡嘉豪毛学魁彭巨来源:《湖南大学学报·自然科学版》2021年第06期摘要:針对风力发电机组变桨系统故障诊断模型参数难以优化问题,提出了基于状态转移算法优化多类最优间隔分布机(multi-class Optimal Margin Distribution Machine optimized by the State Transition Algorithm,mcODM-STA)的风电机组变桨系统故障诊断方法. 该方法选择风电机组功率输出作为主要状态参数,利用Pearson相关系数对风电数据采集与监视控制系统中风电机组历史运行数据进行相关性分析,剔除与功率输出状态参数相关性较低的特征,对余下特征进行二次分析,减少样本特征. 将数据集分为训练集和测试集,训练集用来训练所提故障诊断模型,测试集用来进行测试. 利用国内风电场实际运行数据进行实验验证. 实验结果表明,与其他多种参数优化方法相比,所提方法故障诊断准确率和Kappa系数更高.关键词:多类最优间隔分布机;状态转移算法;故障检测;风电机组;SCADA 系统;进化算法中图分类号:TK83 文献标志码:AFault Diagnosis of Wind Turbine Pitch System Based on Multi-class OptimalMargin Distribution Machine Optimized by State Transition AlgorithmTANG Mingzhu1,KUANG Zijie1,WU Huawei2†,HU Jiahao1†,MAO Xuekui3,PENG Ju4(1. School of Energy and Power Engineering,Changsha University of Science & Technology, Changsha 410114,China;2. Hubei Key Laboratory of Power System Design and Test for Electrical Vehicle,Hubei University ofArts and Science,Xiangyang 441053,China;3. State Grid Beijing Haidian Electric Power Supply Company,Beijing 100195,China;4. Inner Mongolia Qingdianyun Power Service Co,Ltd,Baotou 014030,China)Abstract:Aiming at the problem that the parameters of fault diagnosis model are difficult to be optimized of wind turbine pitch system, a fault diagnosis method of wind turbine pitch system based on multi-class optimal margin distribution machine optimized by the state transition algorithm (mcODM-STA) is proposed. In this method, the wind turbine power output is selected as the main state parameter, and Pearson correlation coefficient is used to analyze the historical operation data of wind turbine in wind power data acquisition and monitoring control system, and the features with low correlation of power output state parameters are eliminated. The remaining features are analyzed twice to reduce the sample features. The data set is divided into training set and test set. The training set is used to train the proposed fault diagnosis model, and the test set is used for testing. The operation data of a domestic wind farm is used for experimental verification. Experimental results show that the proposed method has higher fault diagnosis accuracy and Kappa coefficient than other parameter optimization methods.Key words:multi-class optimal margin distribution machine; state transition algorithm;fault detection;wind turbines;SCADA systems;evolutionary algorithms风力发电机组通常运行在复杂多变的不稳定自然环境中,常年受到阳光、雨水、风沙等侵蚀,存在许多故障隐患,其主要零部件运行于高空,一旦风电机组因故障而引起长时间停机,将严重影响发电量和花费大量成本来维护检修及更换零件,引起巨大的经济损失[1].变桨距系统是风电机组中的重要部分,及时有效地对变桨系统进行状态监测和故障诊断具有重要意义. 近年来基于机器学习的风电机组故障诊断方法获得广泛应用,利用风电数据采集与监视控制系统(Supervisory Control and Data Acquisition,SCADA)中数据构建风电机组变桨系统故障诊断模型[2]. 基于机器学习的故障诊断方法有:神经网络方法[3]、支持向量机、大间隔分布机等. 文献[4]针对风力发电机组的故障诊断,提出一种基于数据驱动的深层神经网络方法,该方法不需要物理模型经验和预先筛选数据对风电机组进行故障诊断,诊断准确率高. 文献[5]利用人工神经网络对风力发电机主轴承进行早期故障预测获得了较好的诊断效果. 文献[6]提出一种基于雷达图和支持向量机的方法对风电机组变桨系统进行故障诊断与预测,提升了预测精度.大间隔分布机(Large Margin Distribution Machine,LDM)是由Zhang等人[7]于2014年提出的分类学习算法,其思想在优化最小间隔最大化超平面的基础上,平衡分类样本均值与方差,充分考虑样本的间隔分布,相较于支持向量机拥有更好的分类效果和泛化性能. 文献[8]针对大型风电机组数据分类不平衡和误分类不平等代价等问题,提出了代价敏感型大间隔分布机,在解决这些问题的同时提升了故障诊断准确率. 文献[9]提出了多类最优间隔分布机(multi-class Optimal Margin Distribution Machine,mcODM).在基于机器学习对风电机组进行故障诊断的过程中,选择机器学习算法的最优参数以提高故障诊断性能,利用进化算法优化故障诊断模型超参数. 文献[10]提出了一种新的BP神经网络(Back Propagation Neural Network,BPNN)异常识别模型,并与遗传算法相结合,为风电机组的异常识别取得了良好的效果. 文献[11]采用粒子群优化算法对多类最小二乘支持向量机进行特征参数优化,实现了拥有较高准确率的风电机组变桨系统故障预测.状态转移算法(State Transition Algorithm,STA)是一种适用于优化大规模复杂问题的智能随机全局优化算法[12],该算法的4个状态转移算子通过交替轮换的方式进行全局搜索,可快速获得全局最优解. 针对结构复杂、故障多样的风电机组变桨系统,利用状态转移算法对其进行故障诊断模型参数优化是具有相当优势的.本文针对风电机组变桨系统故障诊断模型参数难以优化问题,提出了基于STA优化的多类最优间隔分布机故障诊断模型,以提高故障诊断性能.1 多类最优间隔分布机设一个特征的集合为X = [x1,…,xk],其对应的类别标签集为Y = [K],其中[K] = {1,…,k};给定一个训练集S = {(x1,y1),(x2,y2),…,(xm,ym)};定义一个映射函数φ,通过核函数κ将样本集映射至高维空间φ:X→H,对应权向量为ω1,…,ωk. 对每个权向量ωl定义一个记分函数ωTlφ(x),每个样本的特征值和其对应的标签,会使得该样本的记分函数值达到最大,即h (x) = argmaxl∈Y ωTlφ(x),从而引出间隔定义:γh(x,y)= ωTyφ(x) - ωTlφ(x)(1)当计算产生一个负间隔时分类器分类错误.用γ表示间隔的平均值,最优间隔分布机可表示为:Ω(ω) - ηγ + (ξ2j + ε2j)s.t. γh(xj,yj)≥ γ - ξjγh(xj,yj)≤ γ + εj,∀j (2)式中:Ω(ω)是正则项;η和λ是平衡参数;ξj和εj分别是间隔γh(xj,yj)与间隔均值γ的正、负偏差;(1/m)(ξ2j + ε2j)为方差.对ω进行缩放,间隔均值可以固定为1,样本(xj,yj)与间隔均值的偏差为γh(xj,yj)-1,该最优间隔分布机可改写为:Ω(ω) +s.t. γh(xj,yj)≥ 1 - θ - ξjγh(xj,yj)≤ 1 + θ + εj,∀j (3)式中:τ∈[0,1)是平衡两种不同偏差的参数(大于或小于间隔均值);θ∈[0,1)是零损失参数,它可以控制支持向量的个数,即解的稀疏性;(1 - θ)2是将上述第二项成为0~1损失的替代损失.对于多分类问题,正则项Ω(ω)=‖wl‖2H/2,结合间隔定义,mcODM表达式为:‖wl‖2H +s.t. ωTyjφ(xj)-ωTlφ(xj)≥1-θ-ξjωTyjφ(xj)-ωTlφ(xj)≤1+θ+εj,?j (4)式中:λ、τ和θ是平衡参数.风力发电机组通常运行在复杂多变的不稳定自然环境中,常年受到阳光、雨水、风沙等侵蚀,存在许多故障隐患,其主要零部件运行于高空,一旦风电机组因故障而引起长时间停机,将严重影响发电量和花费大量成本来维护检修及更换零件,引起巨大的经济损失[1].变桨距系统是风电机组中的重要部分,及时有效地对变桨系统进行状态监测和故障诊断具有重要意义. 近年来基于机器学习的风电机组故障诊断方法获得广泛应用,利用风电数据采集与监视控制系统(Supervisory Control and Data Acquisition,SCADA)中数据构建风电机组变桨系统故障诊断模型[2]. 基于机器学习的故障诊断方法有:神经网络方法[3]、支持向量机、大间隔分布机等. 文献[4]针对风力发电机组的故障诊断,提出一种基于数据驱动的深层神经网络方法,该方法不需要物理模型经验和预先筛选数据对风电机组进行故障诊断,诊断准确率高. 文献[5]利用人工神经网络对风力发电机主轴承进行早期故障预测获得了较好的诊断效果. 文献[6]提出一种基于雷达图和支持向量机的方法对风电机组变桨系统进行故障诊断与预测,提升了预测精度.大间隔分布机(Large Margin Distribution Machine,LDM)是由Zhang等人[7]于2014年提出的分类学习算法,其思想在优化最小间隔最大化超平面的基础上,平衡分类样本均值与方差,充分考虑样本的间隔分布,相较于支持向量机拥有更好的分类效果和泛化性能. 文献[8]针对大型风电机组数据分类不平衡和误分类不平等代价等问题,提出了代价敏感型大间隔分布机,在解决这些问题的同时提升了故障诊断准确率. 文献[9]提出了多类最优间隔分布机(multi-class Optimal Margin Distribution Machine,mcODM).在基于机器学习对风电机组进行故障诊断的过程中,选择机器学习算法的最优参数以提高故障诊断性能,利用进化算法优化故障诊断模型超参数. 文献[10]提出了一种新的BP神经网络(Back Propagation Neural Network,BPNN)异常识别模型,并与遗传算法相结合,为风电机组的异常识别取得了良好的效果. 文献[11]采用粒子群优化算法对多类最小二乘支持向量机进行特征参数优化,实现了拥有较高准确率的风电机组变桨系统故障预测.状态转移算法(State Transition Algorithm,STA)是一種适用于优化大规模复杂问题的智能随机全局优化算法[12],该算法的4个状态转移算子通过交替轮换的方式进行全局搜索,可快速获得全局最优解. 针对结构复杂、故障多样的风电机组变桨系统,利用状态转移算法对其进行故障诊断模型参数优化是具有相当优势的.本文针对风电机组变桨系统故障诊断模型参数难以优化问题,提出了基于STA优化的多类最优间隔分布机故障诊断模型,以提高故障诊断性能.1 多类最优间隔分布机设一个特征的集合为X = [x1,…,xk],其对应的类别标签集为Y = [K],其中[K] = {1,…,k};给定一个训练集S = {(x1,y1),(x2,y2),…,(xm,ym)};定义一个映射函数φ,通过核函数κ将样本集映射至高维空间φ:X→H,对应权向量为ω1,…,ωk. 对每个权向量ωl定义一个记分函数ωTlφ(x),每个样本的特征值和其对应的标签,会使得该样本的记分函数值达到最大,即h (x) = argmaxl∈Y ωTlφ(x),从而引出间隔定义:γh(x,y)= ωTyφ(x) - ωTlφ(x)(1)当计算产生一个负间隔时分类器分类错误.用γ表示间隔的平均值,最优间隔分布机可表示为:Ω(ω) - ηγ + (ξ2j + ε2j)s.t. γh(xj,yj)≥ γ - ξjγh(xj,yj)≤ γ + εj,∀j (2)式中:Ω(ω)是正则项;η和λ是平衡参数;ξj和εj分别是间隔γh(xj,yj)与间隔均值γ的正、负偏差;(1/m)(ξ2j + ε2j)为方差.对ω进行缩放,间隔均值可以固定为1,样本(xj,yj)与间隔均值的偏差为γh(xj,yj)-1,该最优间隔分布机可改写为:Ω(ω) +s.t. γh(xj,yj)≥ 1 - θ - ξjγh(xj,yj)≤ 1 + θ + εj,∀j (3)式中:τ∈[0,1)是平衡两种不同偏差的参数(大于或小于间隔均值);θ∈[0,1)是零损失参数,它可以控制支持向量的个数,即解的稀疏性;(1 - θ)2是将上述第二项成为0~1损失的替代损失.对于多分类问题,正则项Ω(ω)=‖wl‖2H/2,结合间隔定义,mcODM表达式为:‖wl‖2H +s.t. ωTyjφ(xj)-ωTlφ(xj)≥1-θ-ξjωTyjφ(xj)-ωTlφ(xj)≤1+θ+εj,∀j (4)式中:λ、τ和θ是平衡参数.风力发电机组通常运行在复杂多变的不稳定自然环境中,常年受到阳光、雨水、风沙等侵蚀,存在许多故障隐患,其主要零部件运行于高空,一旦风电机组因故障而引起长时间停机,将严重影响发电量和花费大量成本来维护检修及更换零件,引起巨大的经济损失[1].变桨距系统是风电机组中的重要部分,及时有效地对变桨系统进行状态监测和故障诊断具有重要意义. 近年来基于机器学习的风电机组故障诊断方法获得广泛应用,利用风电数据采集与监视控制系统(Supervisory Control and Data Acquisition,SCADA)中数据构建风电机组变桨系统故障诊断模型[2]. 基于机器学习的故障诊断方法有:神经网络方法[3]、支持向量机、大间隔分布机等. 文献[4]针对风力发电机组的故障诊断,提出一种基于数据驱动的深层神经网络方法,该方法不需要物理模型经验和预先筛选数据对风电机组进行故障诊断,诊断准确率高. 文献[5]利用人工神经网络对风力发电机主轴承进行早期故障预测获得了较好的诊断效果. 文献[6]提出一种基于雷达图和支持向量机的方法对风电机组变桨系统进行故障诊断与预测,提升了预测精度.大间隔分布机(Large Margin Distribution Machine,LDM)是由Zhang等人[7]于2014年提出的分类学习算法,其思想在优化最小间隔最大化超平面的基础上,平衡分类样本均值与方差,充分考虑样本的间隔分布,相较于支持向量机拥有更好的分类效果和泛化性能. 文献[8]针对大型风电机组数据分类不平衡和误分类不平等代价等问题,提出了代價敏感型大间隔分布机,在解决这些问题的同时提升了故障诊断准确率. 文献[9]提出了多类最优间隔分布机(multi-class Optimal Margin Distribution Machine,mcODM).在基于机器学习对风电机组进行故障诊断的过程中,选择机器学习算法的最优参数以提高故障诊断性能,利用进化算法优化故障诊断模型超参数. 文献[10]提出了一种新的BP神经网络(Back Propagation Neural Network,BPNN)异常识别模型,并与遗传算法相结合,为风电机组的异常识别取得了良好的效果. 文献[11]采用粒子群优化算法对多类最小二乘支持向量机进行特征参数优化,实现了拥有较高准确率的风电机组变桨系统故障预测.状态转移算法(State Transition Algorithm,STA)是一种适用于优化大规模复杂问题的智能随机全局优化算法[12],该算法的4个状态转移算子通过交替轮换的方式进行全局搜索,可快速获得全局最优解. 针对结构复杂、故障多样的风电机组变桨系统,利用状态转移算法对其进行故障诊断模型参数优化是具有相当优势的.本文针对风电机组变桨系统故障诊断模型参数难以优化问题,提出了基于STA优化的多类最优间隔分布机故障诊断模型,以提高故障诊断性能.1 多类最优间隔分布机设一个特征的集合为X = [x1,…,xk],其对应的类别标签集为Y = [K],其中[K] = {1,…,k};给定一个训练集S = {(x1,y1),(x2,y2),…,(xm,ym)};定义一个映射函数φ,通过核函数κ将样本集映射至高维空间φ:X→H,对应权向量为ω1,…,ωk. 对每个权向量ωl定义一个记分函数ωTlφ(x),每个样本的特征值和其对应的标签,会使得该样本的记分函数值达到最大,即h (x) = argmaxl∈Y ωTlφ(x),从而引出间隔定义:γh(x,y)= ωTyφ(x) - ωTlφ(x)(1)当计算产生一个负间隔时分类器分类错误.用γ表示间隔的平均值,最优间隔分布机可表示为:Ω(ω) - ηγ + (ξ2j + ε2j)s.t. γh(xj,yj)≥ γ - ξjγh(xj,yj)≤ γ + εj,∀j (2)式中:Ω(ω)是正则项;η和λ是平衡参数;ξj和εj分别是间隔γh(xj,yj)与间隔均值γ的正、负偏差;(1/m)(ξ2j + ε2j)为方差.对ω进行缩放,间隔均值可以固定为1,样本(xj,yj)与间隔均值的偏差为γh(xj,yj)-1,该最优间隔分布机可改写为:Ω(ω) +s.t. γh(xj,yj)≥ 1 - θ - ξjγh(xj,yj)≤ 1 + θ + εj,∀j (3)式中:τ∈[0,1)是平衡两种不同偏差的参数(大于或小于间隔均值);θ∈[0,1)是零损失参数,它可以控制支持向量的个数,即解的稀疏性;(1 - θ)2是将上述第二项成为0~1损失的替代损失.对于多分类问题,正则项Ω(ω)=‖wl‖2H/2,结合间隔定义,mcODM表达式为:‖wl‖2H +s.t. ωTyjφ(xj)-ωTlφ(xj)≥1-θ-ξjωTyjφ(xj)-ωTlφ(xj)≤1+θ+εj,∀j (4)式中:λ、τ和θ是平衡参数.风力发电机组通常运行在复杂多变的不稳定自然环境中,常年受到阳光、雨水、风沙等侵蚀,存在许多故障隐患,其主要零部件运行于高空,一旦風电机组因故障而引起长时间停机,将严重影响发电量和花费大量成本来维护检修及更换零件,引起巨大的经济损失[1].变桨距系统是风电机组中的重要部分,及时有效地对变桨系统进行状态监测和故障诊断具有重要意义. 近年来基于机器学习的风电机组故障诊断方法获得广泛应用,利用风电数据采集与监视控制系统(Supervisory Control and Data Acquisition,SCADA)中数据构建风电机组变桨系统故障诊断模型[2]. 基于机器学习的故障诊断方法有:神经网络方法[3]、支持向量机、大间隔分布机等. 文献[4]针对风力发电机组的故障诊断,提出一种基于数据驱动的深层神经网络方法,该方法不需要物理模型经验和预先筛选数据对风电机组进行故障诊断,诊断准确率高. 文献[5]利用人工神经网络对风力发电机主轴承进行早期故障预测获得了较好的诊断效果. 文献[6]提出一种基于雷达图和支持向量机的方法对风电机组变桨系统进行故障诊断与预测,提升了预测精度.大间隔分布机(Large Margin Distribution Machine,LDM)是由Zhang等人[7]于2014年提出的分类学习算法,其思想在优化最小间隔最大化超平面的基础上,平衡分类样本均值与方差,充分考虑样本的间隔分布,相较于支持向量机拥有更好的分类效果和泛化性能. 文献[8]针对大型风电机组数据分类不平衡和误分类不平等代价等问题,提出了代价敏感型大间隔分布机,在解决这些问题的同时提升了故障诊断准确率. 文献[9]提出了多类最优间隔分布机(multi-class Optimal Margin Distribution Machine,mcODM).在基于机器学习对风电机组进行故障诊断的过程中,选择机器学习算法的最优参数以提高故障诊断性能,利用进化算法优化故障诊断模型超参数. 文献[10]提出了一种新的BP神经网络(Back Propagation Neural Network,BPNN)异常识别模型,并与遗传算法相结合,为风电机组的异常识别取得了良好的效果. 文献[11]采用粒子群优化算法对多类最小二乘支持向量机进行特征参数优化,实现了拥有较高准确率的风电机组变桨系统故障预测.状态转移算法(State Transition Algorithm,STA)是一种适用于优化大规模复杂问题的智能随机全局优化算法[12],该算法的4个状态转移算子通过交替轮换的方式进行全局搜索,可快速获得全局最优解. 针对结构复杂、故障多样的风电机组变桨系统,利用状态转移算法对其进行故障诊断模型参数优化是具有相当优势的.本文针对风电机组变桨系统故障诊断模型参数难以优化问题,提出了基于STA优化的多类最优间隔分布机故障诊断模型,以提高故障诊断性能.1 多类最优间隔分布机设一个特征的集合为X = [x1,…,xk],其对应的类别标签集为Y = [K],其中[K] = {1,…,k};给定一个训练集S = {(x1,y1),(x2,y2),…,(xm,ym)};定义一个映射函数φ,通过核函数κ将样本集映射至高维空间φ:X→H,对应权向量为ω1,…,ωk. 对每个权向量ωl定义一个记分函数ωTlφ(x),每个样本的特征值和其对应的标签,会使得该样本的记分函数值达到最大,即h (x) = argmaxl∈Y ωTlφ(x),从而引出间隔定义:γh(x,y)= ωTyφ(x) - ωTlφ(x)(1)当计算产生一个负间隔时分类器分类错误.用γ表示间隔的平均值,最优间隔分布机可表示为:Ω(ω) - ηγ + (ξ2j + ε2j)s.t. γh(xj,yj)≥ γ - ξjγh(xj,yj)≤ γ + εj,∀j (2)式中:Ω(ω)是正则项;η和λ是平衡参数;ξj和εj分别是间隔γh(xj,yj)与间隔均值γ的正、负偏差;(1/m)(ξ2j + ε2j)为方差.对ω进行缩放,间隔均值可以固定为1,样本(xj,yj)与间隔均值的偏差为γh(xj,yj)-1,该最优间隔分布机可改写为:Ω(ω) +s.t. γh(xj,yj)≥ 1 - θ - ξjγh(xj,yj)≤ 1 + θ + εj,∀j (3)式中:τ∈[0,1)是平衡两种不同偏差的参数(大于或小于间隔均值);θ∈[0,1)是零损失参数,它可以控制支持向量的个数,即解的稀疏性;(1 - θ)2是将上述第二项成为0~1损失的替代损失.对于多分类问题,正则项Ω(ω)=‖wl‖2H/2,结合间隔定义,mcODM表达式为:‖wl‖2H +s.t. ωTyjφ(xj)-ωTlφ(xj)≥1-θ-ξjωTyjφ(xj)-ωTlφ(xj)≤1+θ+εj,∀j (4)式中:λ、τ和θ是平衡参数.。
风电机组运行工况辨识与变桨系统故障诊断

1)The structure and working principle of the direct drive WTGS and electric servo pitch system and the SCADA system are briefly introduced. The operating parameters of the WTGS are analyzed and the data of the historical data collected by the SCADA monitoring system is preprocessed. Analysis of operating parameters of pitch system based on correlation analysis of feature parameters based on information entropy.
3)Aiming at the fault diagnosis of wind turbine electric servo pitch system, the
II
沈阳工业大学硕士学位论文
characteristic attribute selection of the pitch system is carried out, and the abnormal identification model of the pitch system is established under different working conditions, the model is based on principal component analysis, the electric servo pitch system operation data is projected onto the principal subspace and the residual subspace of the principal component model, and it is determined by determining whether the corresponding T2 and SPE exceed the corresponding control limit; also, we use the contribution map method to find abnormal properties, the fault reconstruction based on SPE is carried out by the theory of fault subspace, and finally the fault diagnosis of WTGS pitch system is realized. Key Words: Wind turbine generator system, Electric servo pitch system, Operating mode identification, Fault diagnosis, Feature parameter filtering
变桨故障汇总
20 pitch_Atech_converter.error_pitch_Atech_converter_temp_LimitMax 变桨系统变频器超温 21 pitch_Atech_converter.error_pitch_Atech_converter_temp_LimitMax_1 变桨检测轴箱1变频器超温故障,变频器温度超过75℃,报此故障 0
序号 故障名 1 error_pitch_Atech.error_global 2 pitch_Atech_capacitor.reeor_pitch_Atech_capacitor 3
故障原因 变桨系统故障,故障汇总 变桨电容电压故障汇总
正常时通讯状态
停机方式 复位方式 取决于发生的具体故障取决于发生的具体故障 紧急停机 紧急停机 手动复位 手动复位
紧急停机 紧急停机
手动复位 手动复位
22 pitch_Atech_converter.error_pitch_Atech_converter_temp_LimitMax_2 变桨检测轴箱2变频器超温故障,变频器温度超过75℃,报此故障
0
紧急停机
手动复位
23 pitch_Atech_converter.error_pitch_Atech_converter_temp_LimitMax_3 变桨检测轴箱3变频器超温故障,变频器温度超过75℃,报此故障 24 pitch_Atech_fan_heater.error_pitch_Atech_fan_heater 变桨系统温度故障
CAN通讯故障时时,报此故障
1
紧急停机
手动复位
19 pitch_Atech_converter.error_pitch_Atech_status_converter_ok_3变桨检测轴箱3 CAN通讯故障时,报此故障
技术直流变桨电机常见故障分析及主动维护技术方案
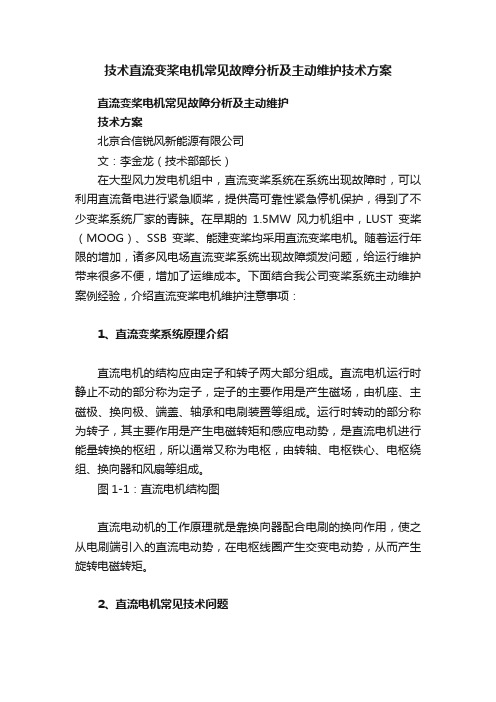
技术直流变桨电机常见故障分析及主动维护技术方案直流变桨电机常见故障分析及主动维护技术方案北京合信锐风新能源有限公司文:李金龙(技术部部长)在大型风力发电机组中,直流变桨系统在系统出现故障时,可以利用直流备电进行紧急顺桨,提供高可靠性紧急停机保护,得到了不少变桨系统厂家的青睐。
在早期的1.5MW风力机组中,LUST变桨(MOOG)、SSB变桨、能建变桨均采用直流变桨电机。
随着运行年限的增加,诸多风电场直流变桨系统出现故障频发问题,给运行维护带来很多不便,增加了运维成本。
下面结合我公司变桨系统主动维护案例经验,介绍直流变桨电机维护注意事项:1、直流变桨系统原理介绍直流电机的结构应由定子和转子两大部分组成。
直流电机运行时静止不动的部分称为定子,定子的主要作用是产生磁场,由机座、主磁极、换向极、端盖、轴承和电刷装置等组成。
运行时转动的部分称为转子,其主要作用是产生电磁转矩和感应电动势,是直流电机进行能量转换的枢纽,所以通常又称为电枢,由转轴、电枢铁心、电枢绕组、换向器和风扇等组成。
图1-1:直流电机结构图直流电动机的工作原理就是靠换向器配合电刷的换向作用,使之从电刷端引入的直流电动势,在电枢线圈产生交变电动势,从而产生旋转电磁转矩。
2、直流电机常见技术问题(1)换向器打火正常情况下电刷与换向器之间为“滑触”结构,在换相时会产生轻微电火花,不会对设备产生危害。
如果换向器表面严重磨损,电刷磨损形成严重积碳,刷握压力异常,电刷位置不在物理中行线上等异常状态时,将引起严重电火花,造成换向器进一步损坏,严重情况下引起换向器绝缘击穿损坏,造成整个电机损坏。
图2-1 换向器放电示意图(2)电枢绕组击穿电枢绕组、励磁绕发生绕组短路击穿,绕组烧毁故障。
通过对电机拆机发现,这种绕组烧毁情况,一般由于电机长期过载高温,引起绕组绝缘层损坏。
电机过载原因包括电磁刹车不能正常打开,变桨系统机械卡死等故障。
图2-2 励磁绕组绝缘击穿图(3)其他故障在变桨系统中报出速度比较、速度超限故障,一般为测速电机或测速编码器损坏,测速电机与测速编码器器都是高精度电子器件,运行中需要注意对harting插头,以及编码器密封圈进行紧固与检查,保证接触可靠。
风电机组变桨系统紧急顺桨轴3桨叶未收回原因分析及处理

风电机组变桨系统紧急顺桨轴 3桨叶未收回原因分析及处理摘要:风电机组桨叶是否能安全可靠收回,直接关系着风机运行的安全稳定性。
我场实际运行中发现5号风机MOOG变桨在轴3紧急控制顺桨回路出现异常时,该回路故障未被检测出来,直到其它故障触发紧急顺桨后桨叶无法顺回91°安全位置才暴露出该问题。
本文结合上海电气2MW机组调试和检修工作中积累的经验,对MOOG变桨紧急顺桨轴3桨叶未收回故障进行了原因分析及处理,进一步提高风机设备的可利用率及稳定性。
关键词:变桨系统;紧急顺桨;原因分析;测试方法1.概述上海电气W2000H-93-80型风力发电机组变桨系统采用MOOG变桨。
其变桨方式为变桨距控制系统,它的主要功能是通过调整桨叶节距在0~91゜之间变化,以改变气流对叶片的攻角,在风机的起动过程中依靠风力方便地自行起动,在达到额定风速时使风机能够稳定的保持输出功率恒定,以及在达到切出风速或者风机因发生重要故障(包括机舱强烈振动超出允许范围、偏航时发生扭缆开关保护动作、急停按钮被按下、电网突然停电等)而使安全链断开时,使浆叶全顺浆到91゜,进行空气制动,改善风机和浆叶的受力情况,确保叶片偏离受风的角度,防止风机超速、飞车、倒塔等严重后果发生。
本文针对东川野牛风电场风电机组MOOG变桨系统轴3的2个编码器偏差超限故障停机,暴露出紧急顺桨轴3桨叶未收回的情况进行分析。
1.故障情况2021年3月9日,野牛风电场05号机组报出变桨轴3的2个编码器偏差超限故障停机,故障代码300643。
查看SCADA后台变桨监视界面发现,轴1、轴2的两个编码器在89゜,轴3的2个编码器电机编码器在89゜、叶片编码器在86.1°,符合故障触发停机逻辑(两个桨距角编码器角度最大偏差3°)快速停机,3个轴顺桨至89°(由电网电源控制电机驱动)故障停机。
1.现场判断及检查3.1通过机组主控变桨监视系统数据可知,轴3的2个编码器电机编码器在89°叶片编码器在86.1°。
变桨培训(MOOG)知识讲解

采集转换 5秒吸合一次 采集轴三 和轮毂温度
26
温度变送器
Pitchmaster X2:3、4
Pitchmaster X2:5、6
电压检测模块
电池柜:蓄电池
直流回路 供230V直流电
轴柜:Pitchmaster正常 轴柜:安全链闭合接触器 17
4、变桨回路
国电联合动力技术有限公司 国电风电设备调试所
直流回路
分流电阻 主控柜:主电400V
18
变桨电机
正常变桨
AC500输出直流电
国电联合动力技术有限公司 国电风电设备调试所
Pitchmaster: 主电断,维持一段时间
Pitchmaster 电子刹车
5
变桨系统结构原理图
国电联合动力技术有限公司 国电风电设备调试所
6
三、电气原理讲解
1、供电回路 2、PLC及通讯回路 3、安全链回路 4、变桨回路 5、其它重要电气回路
国电联合动力技术有限公司 国电风电设备调试所
7
1、供电回路
国电联合动力技术有限公司 国电风电设备调试所
滑环-轮毂400V
充电器AC500
4
二、变桨系统整体结构组成
国电联合动力技术有限公司 国电风电设备调试所
MOOG公司风力发电机组的变桨系统采用最先进电 动变桨控制,提高了系统的可靠性,降低了维护成本 。变桨的控制系统由七个柜体组成:三个轴柜,三个 蓄电池柜和一个主控柜,他们不仅实现风机启动和运 行时的桨距调节,而且能够在事故情况下担负起安全 保护作用,完成叶片顺桨操作,同时还完成故障诊断 、状态监测、故障状态下的安全复位功能、雷电保护 控制、电池管理功能等,确保了系统的高可靠性。
轴柜:变桨驱动器 pitchmaster
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
紧急 停机
出现 300101、300102、300103、
300105、300111、300112、 详见 300101、300102、300103、300105、300111、300112、300113、300114、300115、300116
300113、300114、300115、 故障处理方法。
当轴柜 2的充电器输出的直 流充电电压小于等于 173V或 大于等于 265V时,触发此故
障。
(1)检查轴柜 2的充电器 4G1的电源端子 X1-L、X1-N的电压是否为交流 230V。 (2)检查轴柜 2的充电器 4G1的 X16的 5端子是否有 24V直流电压。 (3)检查轴柜 2的充电器 4G1的 X16的 6端子与主控柜 14A1的 6通道的接线。 (4)检查主控柜 14A1的 6通道的状态灯,亮绿灯表示正常,不亮表示出现此故障。 (5)更换轴柜 2的充电器 4G1。
300140、300150之一的故障, 详见 300110、300120、300130、300140、300150的故障处理方法。 停机
触发此故障。
300110 无此代
码
300101
300102
300103
LUST变桨 error_battery_volt
电池电压 age
类故障
error_pitch_status 轴柜 1的充
_battery_voltage_o 电器充电
k_1
电压故障
error_pitch_status 轴柜 2的充
_battery_voltage_o 电器充电
k_2
电压故障
error_pitch_status 轴柜 3的充
_battery_voltage_o 电器充电
k_3
电压故障
紧急 停机
紧急 停机
故障 代码
300000
标识 error_pitch
停机 故障名称
类型
故障原因
LUST变桨 类
总故障
正常 出现任何一个 LUST变桨的故
查看具体 LUST变桨故障并解决
停机
障
处理方法
LUST变桨
error_pitch_batter
300100
电池类故
y
障
出现 300110、300120、300130、 紧急
battery_voltage_sy 电池过电
s_1
压故障
error_pitch_error_ 电池柜 2蓄
battery_voltage_sy 电池过电
s_2
压故障
error_pitch_error_ 电池柜 3蓄
battery_voltage_sy 电池过电
s_3
压故障
紧急 停机
紧急 停机
紧急 停机
当轴柜 3的充电器输出的直 流充电电压小于等于 173V或 大于等于 265V时,触发此故
障。
(1)检查轴柜 3的充电器 5G1的电源端子 X1-L、X1-N的电压是否为交流 230V。 (2)检查轴柜 3的充电器 5G1的 X16的 5端子是否有 24V直流电压。 (3)检查轴柜 3的充电器 5G1的 X16的 6端子与主控柜 14A1的 8通道的接线。 (4)检查主控柜 14A1的 8通道的状态灯,亮绿灯表示正常,不亮表示出现此故障。 (5)更换轴柜 3的充电器 5G1。
300116之一的故障,触发此
故障。
当轴柜 1的充电器输出的直 流充电电压小于等于 173V或 大于等于 265V时,触发此故
障。
(1)检查轴柜 1的充电器 3G1的电源端子 X1-L、X1-N的电压是否为交流 230V。 (2)检查轴柜 1的充电器 3G1的 X16的 5端子是否有 24V直流电压。 (3)检查轴柜 1的充电器 3G1的 X16的 6端子与主控柜 14A1的 4通道的接线。 (4)检查主控柜 14A1的 4通道的状态灯,亮绿灯表示正常,不亮表示出现此故障。 (5)更换轴柜 1的充电器 3G1。
error_pitch_main_s 电池柜电 300105
tatus_battery_oБайду номын сангаас 压故障
紧急 停机
当出现 300101、300102、 300103之一的故障时,触发 详见 300101、300102、300103的故障处理方法。
此故障。
300111 300112 300113
error_pitch_error_ 电池柜 1蓄
1、检查轴柜 1内电池电压监视模块 9U2的供电回路; (1)测量轴柜 1的 9U2的工作电源端子 A1、A2之间的电压是否为交流 230V。 (2)检查主控柜 3F3开关是否闭合正常,如果正常闭合后,主控柜 11A1的 2通道绿灯 应常亮,否则不亮 (3)检查主控柜开关 1Q1是否闭合正常。 2、检查轴柜 1内电池电压监视模块 9U2输出回路; 当电池柜 1蓄电池的直流电 (1)检查轴柜 1的 9U2的端子 15,18是否有 24V直流电压。 压超过 265V时,触发此故障。 (2)检查轴柜 1的 9U2的端子 18与主控柜 9A1的 4通道之间的接线。 3、如果没有上述问题出现,则为轴柜 1的 9U2自身问题,更换之; 4、电池柜 1的电池电压超高; (1)测量轴柜 1的 9U2的端子 F2、E之间的直流电压是否超过 265V。 (2)检查主控柜 9A1的 4通道灯,亮绿灯表示正常,无高压出现。不亮表示异常,出现 高压。 (3)检查电池柜 1的电池并更换。 1、检查轴柜 2内电池电压监视模块 9U2的供电回路; (1)测量轴柜 2的 9U2的工作电源端子 A1、A2之间的电压是否为交流 230V。 (2)检查主控柜 4F3开关是否闭合正常,如果正常闭合后,主控柜 12A1的 2通道绿灯 应常亮,否则不亮 (3)检查主控柜开关 1Q1是否闭合正常。 2、检查轴柜 2内电池电压监视模块 9U2输出回路; 当电池柜 2蓄电池的直流电 (1)检查轴柜 2的 9U2的端子 15,18是否有 24V直流电压。 压超过 265V时,触发此故障。 (2)检查轴柜 2的 9U2的端子 18与主控柜 9A1的 5通道之间的接线。 3、如果没有上述问题出现,则为轴柜 2的 9U2自身问题,更换之; 4、电池柜 2的电池电压超高; (1)测量轴柜 2的 9U2的端子 F2、E之间的直流电压是否超过 265V。 (2)检查主控柜 9A1的 5通道灯,亮绿灯表示正常,无高压出现。不亮表示异常,出现 高压。 (3)检查电池柜 2的电池并更换。 1、检查轴柜 3内电池电压监视模块 9U2的供电回路; (1)测量轴柜 3的 9U2的工作电源端子 A1、A2之间的电压是否为交流 230V。 (2)检查主控柜 5F3开关是否闭合正常,如果正常闭合后,主控柜 13A1的 2通道绿灯 应常亮,否则不亮 当电池柜 3蓄电池的直流电 (3)检查主控柜开关 1Q1是否闭合正常。 压超过 265V时,触发此故障。 2、检查轴柜 2内电池电压监视模块 9U2输出回路; (1)检查轴柜 3的 9U2的端子 15,18是否有 24V直流电压。 (2)检查轴柜 3的 9U2的端子 18与主控柜 9A1的 6通道之间的接线。 3、如果没有上述问题出现,则为轴柜 3的 9U2自身问题,更换之;