自适应均衡(包括LSM和RLS算法)
通信工程自适应均衡
摘要:移动信道的时变性可导致数据通信产生严重的码间串扰,必须选择合适的自适应均衡器,以便最大限度地降低码间串扰的影响,从而降低数据通信的误码率。
本文通过比较选择适用于移动信道的自适应均衡器结构及其自适应算,及其在GSM中的具体应用。
关键词:GSM;码间串扰;自适应均衡器;判决反馈;信号时间结构移动信道是时变的,具有多径延迟、衰落等特性。
当数据信号在HF信道传输时,主要受乘性干扰和加性干扰影响。
例如在GSM系统中,比特速率为270kbit/s,则每一比特时间为3.7ms。
因此,一比特对应1.1km。
假如反射点在移动台之后lkm,那么反射信号的传输路径将比直射信号长2km。
这样就会在有用信号中混有比它迟到两比特时间的另一个信号,出现了码间干扰(有时候也这样说:GSM的射频信号带宽远大于多径衰落信道的相干带宽而造成码间干扰)。
加性干扰造成的错码主要采用差错控制技术来解决,乘性干扰导致码间串扰,对固定特性的信道,可以采用收发匹配滤波器来消除,但对于时变的移动信道,信道的参数是变化的,必须采用自适应均衡技术,即必须自适应调节均衡器的抽头系数以跟踪信道变化。
在讨论均衡技术之前,介绍一下通信信号的时间结构是有必要的。
一.通信信号的时间结构在实际的通信系统中,除了信宿端接收的数据之外,还有一些辅助信息可以利用,这些辅助信息通常是以概率模型的形式给出的。
在地震信号反卷积中,该概率模型是物探反射系数的统计量,而在均衡技术中,则是被发射的数据序列的统计量(简称为时间结构)。
物探反射系数的统计量是人们在长期的观测中统计出来的,无法人为干预,而数字通信系统则不同,通信中的数据的某些特征是可以通过发射信号的设计来获取的。
通信信号的时间结构反映了信号的性质,例如信号的调制方式,脉冲成型函数,以及字符的星座图等。
以下是几种典型的信号时间结构。
(1)恒模:在许多无线通信系统中,发射信号都具有恒定的包络,一个很典型的例子就是高斯最小频移键控。
基于LMS与RLS算法的自适应均衡器性能研究

滤 波 器 ,由 一 条 带 抽 头 的 延 时 线 构 成 ,抽 头 间 隔 等 于 码 元 周 期 ,
每个抽头的延时信号ห้องสมุดไป่ตู้加权送到一个相加电路汇总后输出。
用
表示自适应滤波器在
时刻 n 的权矢量,则滤波器输出信号为:
(3)
自适应均衡器根据自适应算法估计系统特性,并自动调整
滤波器权矢量 ,以达到最佳滤波效果,对未知的时变信道做
出 补 偿 。 本 文 采 用 最 小 均 方 算 法 (LMS) 和 递 推 最 小 二 乘 算 法
雷利华: 博士研究生
(RLS)自 适 应 地 更 新 均 衡 器 的 抽 头 系 数 来 跟 踪 信 道 的 变 化 。
基金项目: 基金申请人: 施浒立; 项目名称: 基于通信卫星的
卫星导航系统的基础研究和理论探索; 基金颁发部门: 科技
b.对
计算: 滤波:
(4)
误差估计:
(5)
权矢量更新:
(6)
其中, 收敛因子是用来控制稳定性和收敛速度的
步长参数。 一般为了获得较好的收敛速度与稳态性能, 通常取
(7)
其中 为接收信号功率,可在接收端进行估计得到。
3.2 递推最小二乘算法(RLS)
基 于 MMSE 准 则 的 自 适 应 算 法 目 标 在 于 使 滤 波 器 输 出 与
器具有很大的参考价值与指导意义。
参考文献
[1]胡广书.数字信号处理—— —理论、算法与实现[M].北京:清华大
学出版社,1997. [2]孙永梅,李晖.数字通信系统中自适应均衡技术的研究[J].信息
技术, 2006,No.4:53-55.
(下转第 111 页)
- 26 - 360元 /年 邮局订阅号:82-946
用RLS算法实现自适应均衡器的MATLAB程序
用RLS算法实现自适应均衡器的MATLAB程序考虑一个线性自适应均衡器的原理方框图如《现代数字信号处理导论》自适应均衡器应用示意图。
随机数据产生双极性的随机序列x[n],它随机地取+1和-1。
随机信号通过一个信道传输,信道性质可由一个三系数FIR滤波器刻画,滤波器系数分别是,,。
在信道输出加入方差为σ平方高斯白噪声,设计一个有11个权系数的FIR结构的自适应均衡器,令均衡器的期望响应为x[n-7],选择几个合理的白噪声方差σ平方(不同信噪比),进行实验。
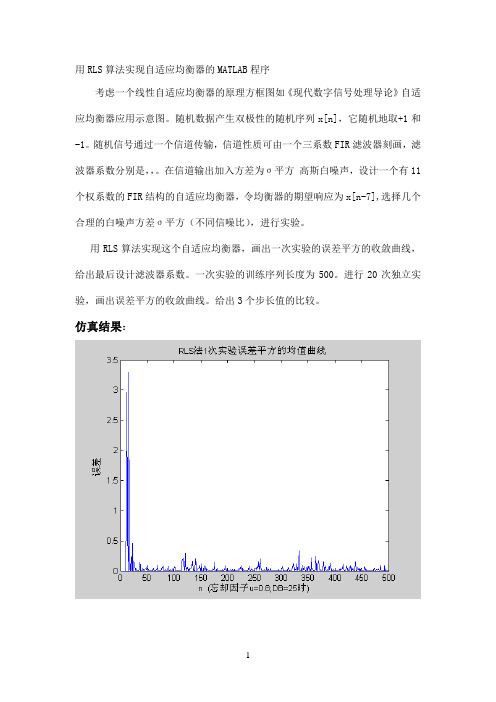
用RLS算法实现这个自适应均衡器,画出一次实验的误差平方的收敛曲线,给出最后设计滤波器系数。
一次实验的训练序列长度为500。
进行20次独立实验,画出误差平方的收敛曲线。
给出3个步长值的比较。
仿真结果:用RLS算法设计的自适应均衡器系数序1234567891011号20次1次结果分析:可以看到,RLS算法的收敛速度明显比LMS算法快,并且误差也比LMS算法小,但是当用更小的忘却因子时,单次实验结果明显变坏,当忘却因子趋于0时,LS算法也就是LMS算法。
附程序:1. RLS法1次实验% written in written by li***clear;N=500;db=25;sh1=sqrt(10^(-db/10));u=1;m=*sh1^2;error_s=0;for loop=1:1w=zeros(1,11)';p=1/m*eye(11,11);V=sh1*randn(1,N );Z=randn(1,N);x=sign(Z);for n=3:N;M(n)=*x(n)+*x(n-1)+*x(n-2);endz=M+V;for n=8:N;d(n)=x(n-7);endfor n=11:N;z1=[z(n) z(n-1) z(n-2) z(n-3) z(n-4) z(n-5) z(n-6) z(n-7) z(n-8) z(n-9) z(n-10)]';k=u^(-1).*p*z1./(1+u^(-1).*z1'*p*z1);e(n)=d(n)-w'*z1;w=w+k.*conj(e(n));p=u^(-1).*p-u^(-1).*k*z1'*p;y(n)=w'*z1;e1(n)=d(n)-w'*z1;enderror_s=error_s+e.^2;endwerror_s=error_s./1;n=1:N;plot(n,error_s);xlabel('n (忘却因子u=1;DB=25时)');ylabel('误差');title('RLS法1次实验误差平方的均值曲线 ');2. RLS法20次实验% written in written by li***clear;N=500;db=25;sh1=sqrt(10^(-db/10));u=1;m=*sh1^2;error_s=0;for loop=1:20w=zeros(1,11)';p=1/m*eye(11,11);V=sh1*randn(1,N );Z=randn(1,N);x=sign(Z);for n=3:N;M(n)=*x(n)+*x(n-1)+*x(n-2);endz=M+V;for n=8:N;d(n)=x(n-7);endfor n=11:N;z1=[z(n) z(n-1) z(n-2) z(n-3) z(n-4) z(n-5) z(n-6) z(n-7) z(n-8) z(n-9) z(n-10)]';k=u^(-1).*p*z1./(1+u^(-1).*z1'*p*z1);e(n)=d(n)-w'*z1;w=w+k.*conj(e(n));p=u^(-1).*p-u^(-1).*k*z1'*p;y(n)=w'*z1;e1(n)=d(n)-w'*z1;enderror_s=error_s+e.^2;endwerror_s=error_s./20;n=1:N;plot(n,error_s);xlabel('n (忘却因子u=1;DB=25时)');ylabel('误差');title('RLS法20次实验误差平方的均值曲线 ');。
MIMO均衡算法(CMALMSRLS)原理介绍
MIMO均衡算法(CMALMSRLS)原理介绍MIMO(Multiple Input Multiple Output)均衡算法是用来解决多输入多输出通信系统中的信号干扰问题的一种方法。
MIMO系统是一种通过在发送和接收端使用多个天线来提高通信性能的技术,它可以同时传输多个信号流,从而提高了系统的传输容量和可靠性。
MIMO均衡算法主要有三种:CMA(Constant Modulus Algorithm)、LMS(Least Mean Square Algorithm)和RLS(Recursive Least Square Algorithm)。
下面将对这三种算法的原理进行详细介绍。
1.CMA算法原理:CMA算法是一种基于判决反馈的盲均衡算法,主要用于消除通信系统中的多径干扰。
其原理基于一种常数模型,即假设接收信号的样本具有常数模量。
CMA算法通过最小化误差信号的功率来估计多径信道,从而实现均衡。
算法的核心思想是根据判决反馈,通过调整均衡器的参数来最小化误差信号的功率。
2.LMS算法原理:LMS算法是一种基于梯度下降法的自适应均衡算法,其主要特点是简单易理解、计算速度快。
LMS算法通过最小化接收信号与期望信号之间的误差来更新均衡器的权重。
算法的核心思想是根据误差信号和输入信号之间的相关性来更新均衡器的参数,从而逐步优化均衡器的性能。
3.RLS算法原理:RLS算法是一种基于递推最小二乘法的自适应均衡算法,其主要特点是收敛速度快、抗干扰性能好。
RLS算法通过最小化误差的均方值来更新均衡器的权重。
算法的核心思想是根据输入信号和误差信号之间的相关性来更新均衡器的参数,从而实现均衡。
相比于LMS算法,RLS算法的计算复杂度较高,但是收敛速度更快,适用于信道条件变化频繁的情况。
总而言之,MIMO均衡算法通过调整均衡器的权重来消除多输入多输出通信系统中的信号干扰,从而提高通信系统的性能。
CMA算法是一种基于判决反馈的盲均衡算法,LMS算法是一种基于梯度下降法的自适应均衡算法,RLS算法是一种基于递推最小二乘法的自适应均衡算法。
递归最小二(RLS)自适应均衡算法
第三章 递归最小二乘(RLS)自适应均衡算法§3.1 引言在自适应滤波系统中,最陡梯度(LMS )法由于其简单获得了广泛的应用。
但各种LMS 算法均有收敛速度较慢(收敛所需码元数多),对非平稳信号的适应性差(且其中有些调整延时较大)的缺点。
究其原因主要是LMS 算法只是用以各时刻的抽头参量等作该时刻数据块估计时平方误差均最小的准则,而未用现时刻的抽头参量等来对以往各时刻的数据块均作重新估计后的累积平方误差最小的原则(即所谓的最小平方(LS )准则)。
为了克服收敛速度慢,信号非平稳适应性差的缺点,根据上述内容,可采用新的准则,即在每时刻对所有已输入信号而言重估的平方误差和最小的准则(即LS 准则)。
从物理概念上可见,这是个在现有的约束条件下利用了最多可利用信息的准则,即在一定意义上最有效,信号非平稳的适应性能也应最好的准则。
这样建立起来的迭代方法就是递归最小二乘(RLS :Recursive Least Square )算法,又称为广义Kalman 自适应算法。
用矩阵的形式表示RLS 算法非常方便,因此我们首先定义一些向量和矩阵。
假定在时刻t ,均衡器的输入信号为t r ,线性均衡器对于信息符号的估计可以表示为∑-=--=KK j j t j r t c t I )1()(ˆ 式(3-1)让)1(-t c j 的下标j 从0=j 到1-=N j ,同时定义K t v t y +=)(,则)(ˆt I变为 ∑-=--=10)()1()(ˆN j jj t y t c t I )()1(t Y t C N N-'= 式(3-2) 其中)1(-t C N 和)(t Y N 分别为均衡器系数)1(-t c j ,1,,1,0-=N j 和输入信号)(j t y -,1,,1,0-=N j 的列向量。
类似的,在DFE 均衡器结构中,均衡器系数)(t c j ,1,,1,0-=N j 的前11+K 个系数为前向滤波器系数,剩下的112--=K N K 为反馈滤波器系数。
RLS算法自适应去噪 引言: 我们组研究的题目是《RLS均衡算法及应用

RLS算法自适应去噪一,引言:我们组研究的题目是《RLS均衡算法及应用》,主要是其在自适应噪声消除中的应用。
在目前的移动通信领域中,克服多径干扰,提高通信质量是一个非常重要的问题,特别是当信道特性不固定时,这个问题就尤为突出,而自适应滤波器的出现,则完美的解决了这个问题。
其核心便是自适应算法,RLS算法便是其中的一种。
我们组主要了解了下RLS算法的基本原理,以及用程序实现了用RLS算法自适应消除语音信号中的噪声。
我们知道语音识别技术很难从实验室走向真正应用很大程度上受制于应用环境下的噪声. 自适应信号处理的理论和技术经过40 多年的发展和完善,已逐渐成为人们常用的语音去噪技术。
本文正是想通过这一与我们生活相关的问题,对简单的语音噪声进行消除,更加深刻地了解RLS算法。
二,算法原理:RLS算法即递规最小二乘算法,对于如下图所示的自适应横向滤波器:RLS算法的基本思想是:给定n-1次迭代滤波器抽头权向量最小二乘估计,依据新到达的数据计算n次迭代权向量的最新估计。
递规最小二乘算法利用二乘方的平均最小化准则,即使得误差的平方和最小。
依这一准则我们可以得出方程组:11(1)()()1(1)()H P n U n k n U P n U n λλ---=+- (1)11()(1)()()(1)HP n P n K n U n P n λλ--=--- (2)*()(1)[()()(1)]Hw n w n k d n U n w n =-+--*(1)()()w n K n n ξ=-+ (3)*()()(1)H n d n U w n ξ=--()(1)()H d n W n U n =-- (4)(1),(2),(3),(4)式即组成了RLS 算法。
(4)式描叙了该算法的滤波过程,据次激励横向滤波器以计算先验估计误差()n ξ。
(3)式描述了该算法的自适应过程,据次可通过在其过去的基础上增加一个量来递推抽头权向量,该量等于先验估计误差()n ξ复共轭与时变增益向量k (n )的乘积。
RLS自适应均衡算法及其应用
现代信号处理学号:小组组长:小组成员及分工:任课教师:聂文滨教师所在学院:信息工程学院2015年 11 月RLS自适应均衡算法及其应用摘要在移动通信领域中,码间干扰始终是影响通信质量的主要因素之一。
产生码间干扰的要原因是信道的非理想特性,多径传输是导致信道非理想特的重要因素。
为了提高通信质量,减少码间千扰,在接收端通常都要采用均衡技术抵消信道的影响。
而在使用均衡器的大多数通信系统中,信道的特性是未知的。
并且在许多情况下,信道响应是随时间变化的。
此时,简单的线性均衡器难以满足系统的基本要求,必须使用具有较强的时变适应能力的均衡器,即自适应均衡器。
在传统的均衡器中,自适应算法必须是以已知的训练序列为前提才能开始进行,然而实际信道中训练序列的传输往往是比较困难的,同时也会降低通信系统的效率。
盲自适应均衡器可以有效地解决这一问题。
本文首先介绍了课题背景及课题研究的意义,阐述了RLS均衡算法的基本概念和基础,并用MATLAB进行仿真。
关键词:码间干扰均衡滤波均衡器AbstractIn the field of mobile communications, the intersymbol interference has always been one of the main factors affecting the quality of communication. Causes to intersymbol interference is a non-ideal properties of channel, multipath transmission channel is not ideal, the important factors. In order to improve the quality of communication, reduce intersymbol interference, often on the receiving end to adopt balanced technology to offset the effect of channel. In using equalizer for most of the communication system, the characteristics of the channel is unknown. And in many cases, the channel response is change over time. At this point, the simple linear equalizer is difficult to meet the basic requirements of the system, you must use strong time-varying adaptive equalizer, namely adaptive equalizer. In traditional equalizer, adaptive algorithms must be based on a known training sequence is the premise to begin, but the actual training sequence in the channel of transmission is often more difficult, at the same time, it will reduce the efficiency of communication system.Blind adaptive equalizer can effectively solve the problem.This paper first introduces the topic background and significance of research, this paper expounds the basic concepts of RLS equalization algorithm and the foundation, and MATLAB simulation.Keywords: balanced filter equalizer intersymbol interference目录第一章绪论 (4)1.1课题背景及意义 (4)第二章自适应均衡算法的基本原理 (5)2.1自适应均衡器 (5)2.2RLS自适应均衡算法的基本原理 (6)第三章MATLAB程序仿真 (11)第四章总结 (16)参考文献 (17)附程序 (18)第一章绪论1.1课题背景及意义在信息业快速发展的今天,进行快速准确的通信是各个行业的基本要求。
自适应均衡

上式中的撇号表示求和时不包括K=0项。
如果在接收滤波器之后接入横向滤波器,那么输出响应就成为:
式中q(t)是横向滤波器的冲激响应。
均衡器调节准则
在有限抽头情况下,均衡器的输出必定存在剩余失真。怎样调节才算是将均衡器的抽头系数调到了最佳状态, 这取决于采用什么样的准则。均衡器调节准则有最小峰值失真准则和最小均方失真准则。
图1横向滤波器
均衡器按无码间串扰的条件——奈奎斯特准则来设计,并且一般取T等于码元宽度TS。如果理想传输系统的 脉冲响应是h(t),由于信道特性的缺陷,数据信号通过这个传输系统后会产生失真,实际系统的脉冲响应是x(t), x(t)与h(t)之间是有差异的。实际结果是:对某一码元而言,x(t)在除相对于该码元t=0时刻的各个抽样点的抽 样值不再为零,形成符号间干扰:
原理
均衡有两个基本途径:一是频域均衡,它使包含均衡器在内的整个系统的总传输特性满足无失真传输的条件。 它往往是分别校正幅频特性和群时延特性,通常,线路均衡便采用频域均衡法。二是时域均衡,就是直接从时间 响应考虑,使包括均衡器在内的整个系统的冲激响应满足无码间串扰的条件。目前广泛利用横向滤波器作时域均 衡器,它可根据信道特性的变化而进行调整。
自适应算法根据不同的最佳准则,可得到最小均方算法(LMS)、递归最小二乘算法(RLS)、维特比(Viterbi) 算法(其实质就是最大似然比算法)等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自适应均衡实验
1、实验内容和目的
1)通过对RLS 算法的仿真,验证算法的性能,更加深刻的理解算法的理论。
2)分别用RLS 算法和LSM 算法实现图1中的自适应均衡器,比较两种算法的差异,分析比较算法的性能,从而掌握两种算法的应用。
图1 自适应均衡框图
2、基本原理分析
1)LMS 算法原理
LMS 算法一般来说包括两个基本过程:滤波过程和自适应过程。
滤波过程来计算线性滤波器的输出及输出结果与期望响应的误差。
自适应则是利用误差来自动调节滤波器的参数。
LMS 算法也是一个递推的算法。
设()J n 是滤波器在n 时刻产生的均方误差,其梯度计算如下:
()()22n n ∇=-+J p Rw
其中R 和p 分别是输入的自相关矩阵和输入与期望输出的互相关矩阵:
()()()ˆH n n n =R
u u
()()()*ˆn n n =p
u d 则梯度向量的瞬态估计为:
()()()()()()*ˆˆ22H n n n n n n ∇
=-+J u d u u w 由最速下降算法可以得到抽头向量更新的递推关系式:
()()()()()()*ˆˆˆ1H
n n n n n n μ⎡⎤+=+-⎣⎦w w u d u w
整个LMS 算法归纳总结如下: 参数设置:
M=抽头数(滤波器长度) μ=步长参数 m a x
2
0MS μ<<
其中max S 是抽头输入功率谱密度的最大值,而滤波器长度M 为中到大 初始化:
如果知道抽头权向量()n w 的先验知识,则用它来选择()ˆ0w 的合适值,否则令()ˆ00=w。
更新滤波过程:
()()()ˆH y n n n =w
u ()()()e n d n y n =- ()()()()*ˆˆ1n n n e n μ+=+w
w u 2)RLS 算法原理
RLS 算法是一个递归的过程,递归最小二乘问题的正则方程可用矩阵写为
()()()ˆn n n =Φw
z 其中n 是可测数据的可变长度,()n Φ更新抽头输入的自相关矩阵,()n z 是抽头
输入与期望响应之间的互相关向量,()ˆn w 是抽头的权值向量。
它们对应的递归更新公式为
()()()()1H n n n n λ=--ΦΦu u (2.1)
()()()()*1n n n n λ=--z z u d (2.2) ()()()()*ˆˆ1n n n n =-+w
w k ξ (2.3) 其中λ是遗忘因子,是一个接近1有小于1的正常数,()n d 是期望输出,()n k 和()n ξ定义如式2.4和式2.5
()()()1=n n n -k Φu (2.4)
()()()()ˆ1H
n n n n =--ξd w u (2.5)
整个RLS 算法的过程可以总结为: a . 算法初始化
1
ˆ(0)(0)δ-==w 0P I
式中的δ是正则化参数,在高信噪比时取小的正常数,低信噪比时取大的正常数。
b . 递推过程,对应n=1,2,…
*11()(1)();()
();
()()
ˆ()()(1)();ˆˆ()(1)()();()(1)()()(1)
H H H n n n n n n n n n n n n n n n n n n n n λλλ--=-=
+=--=-+=---πP u πk u πξd w
u w
w k ξP P k u P
3、实验参数设置
1)对RLS 算法仿真
仿真的是一个ARMA 模型,模型参数如下:
()()()()()()10.35210.52u n u n u n v n v n N n =---+-+-+
其中N 为白噪声,服从均值为0,方差为0.01的正态分布,输入信号v 时伪随机序列,通过原始序列v0=[1 0 1 1 0 1 0 0 1]经过9级移位寄存器产生,输出u 的两个初始值设为1、1.5。
递推次数为200次,采用RLS 算法对模型参数进行估计,将估计
得到的参数与上面的模型参数比较。
RLS 算法中遗忘因子λ取1,正则化参数δ取0.01。
2)基于RLS 算法的均衡
均衡器的抽头数为M=11,递推次数为200,数据源产生有零平均和单位方差的由符号+1和-1组成的Bernoulli 的序列{x (n )}。
数据源之后的信道可以用升余弦脉冲响应来模拟:
20.5{1cos[(2)]}1,2,3()0
n n h n W
π⎧
+-=⎪
=⎨⎪⎩其它
均衡器的输入信号为:
3
1()()()()k u n h k x n k v n ==-+∑
信道延时
(1)
2=72
M -∆=
+ 信噪比为30dB ,遗忘因子λ取1,正则化参数δ取0.004。
分别取W=2.9、W=3.1、W=3.3和W=3.5,用RLS 算法做均衡,画出其学习曲线。
3)RLS 均衡和LMS 均衡比较
信道参数、均衡器长度、递推次数、正则化参数、遗忘因子、数据源等都不变,W=3.1,分别在信噪比为10dB 和信噪比为30dB 的情况下,针对LMS 算法步长参数μ=0.075,用RLS 算法和LMS 算法做均衡,比较其学习曲线。
4、实验过程及结果分析
1)RLS 算法仿真(运行my_rls ):
5101520253035404550
-1-0.5
0.5
1
1.5
待估参数迭代过程
5
10
15
20
25
30
35
40
45
500102030405060708090100估计方差迭代过
程
上面两个图中画出了迭代的前50次的结果,可以看到基本上迭代到20次的时候,模型参数的递推就已经收敛了,而且得到的模型参数值与真实值相差无几,下面给出了迭代200次后的模型参数值:
1.0283 -0.3643 0.9740 0.4745
比较原ARMA 模型()()()()()()10.35210.52u n u n u n v n v n N n =---+-+-+,可以看到用RLS 算法对ARMA 模型提取参数是非常有效的。
2)基于RLS 算法的均衡(运行main ) 画出其学习曲线如图所示:
10
10
10
10
10
1
迭代次数n
集平均平方误差
四种不同特征值扩散度下的RLS 算法学习曲线
从上图中可以看到,虽然W 不同,但4条曲线的收敛速度基本上是一致的,在迭代到40次的时候就收敛了,W 是控制信道失真的程度的,也就是说信道失真的不同并不影响均衡器的收敛速度。
但是随着W 的增大,收敛后的集平均平方误差是在不断增大的,从均衡器输入信号的形式中3
1()()()()
k u n h k x n k v n ==-+∑可以看到u (n )非零的最大相关长度是2。
其自相关矩阵的特征值与W 是密切相关的,W 控制了它的特征值扩散度,W 对特征值扩散度()R χ的影响如下表:
可以看到随着W 的增大,特征值扩散度也是增大的,从而使得RLS 算法的性能下降。
3)RLS 均衡和LMS 均衡比较
分别画出RLS 和LMS 均衡的学习曲线如下图:
050100150
200250300350400450500
10
-3
10
-2
10
-1
10
10
1
迭代次数n
集平均平方误差
当W=3.1和SNR=30dB 时的RLS 算法和LMS 算法的学习曲线
050100150
200250300
350400450500
10
-1
10
10
1
迭代次数n
集平均平方误差
当W=3.1和SNR=10dB 时的RLS 算法和LMS 算法的学习曲线
从上图中可以看到,在大信噪比的时候RLS 算法做均衡的收敛速度要比LMS 算法的收敛速度快得多,而且收敛后的集平均平方误差也比LMS 算法小得多,且收敛后RLS 递推也比较平稳不会再出现大的波动,而LMS 算法收敛后任然有一些小尖峰出现,其稳定性要比RLS 算法差一些。
在小信噪比的情况下,RLS 算法收敛速度的优势变得不明显,但收敛后的集平均平方误差任然比LMS 算法小得多,性能也比较稳定,总体而言RLS 算法复杂度比LMS 算法高,相应的其各方面的性能也比较好。
5、总结和体会
本实验中首先用RLS 算法对ARMA 模型进行了参数的提取,验证了提取方法的有效性,得到了较好的提取结果。
之后针对不同的特征值扩散度(信道参数W )进行RLS 算法均衡的仿真,得出了随特征值扩散度的增大均衡性能不断变坏的结论,最后分别对大信噪比和小信噪比条件下的RLS 均衡和LMS 均衡做了比较,得到了RLS 算法在收敛速度和平方误差等方面优于LMS 算法的结论。
通过这一次的实验,对RLS 算法和LMS 算法有了更加深刻的理解,并初步掌握了其实际应用,也获得了一些新的Matlab 编程的经验。