高等数学第八章第7节方向导数与梯度
高等数学第八章第七节——方向导数与梯度

y
4
3.5
3
2.5
-grad f 2
1.5
grad f
1
0.5
0
0
1
2
3
4
5
6
x
BUCT
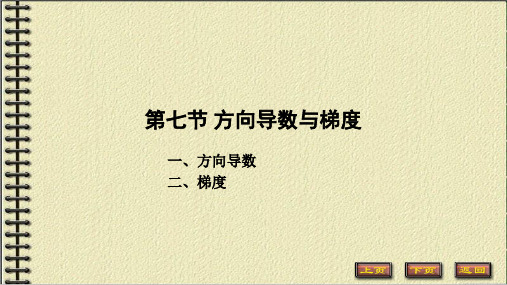
结论:
等高线图指出支流沿最速下降的路径垂直于等高线流动
西
实点 例军 二校
地
形
图
BUCT
3. 梯度的基本运算公式
(1 g)r C a0d (2 g)r (C a u ) d C gruad (3 g( ) r u v a ) g du r g av d rad (4 g( ) u rv ) a u g dv r v a gd u rad (5 g)r f(u a ) d f(u )gr uad
BUCT
1. 定义
向量 G称为函数 f (P) 在点 P 处的梯度 (gradient),
记作gradf, 即
gradf
f , x
f , y
f z
xfiyf jzfk
同样可定义二元函数 f (x,y) 在点P(x, y) 处的梯度 grfa d x fi y f j x f, y f
2 xa042yb042zc042
2
x02 a4
y02 b4
z02 c4
BUCT
作业 P51 2,3,6,7,8,9,10
BUCT
备用题 1. 函数 ulnx2(y2z2)在点 M (1,2,2) 处的梯度 graudM92(1, 2, 2) (92考研)
解: gruaM d u x, u y, u z (1 ,2, 2)
向量场(矢性函数)
高等数学8.8 方向导数
f ( x0
x, y0
y)
f ( x0 , y0 )
f x (x0 , y0 )
(2). 沿着 x轴负向、 y 轴负向的方向导数是 f x , f y.
定理 如果函数z f ( x, y)在点 P(x0, y0) 处可微,那末函数在该
点沿任意方向 L 的方向导数都存在,且有
(6
x
2
8
y
2
1
)2
在此处沿方向n的方向导数.
z
解 令 F( x, y, z) 2x2 3 y2 z2 6,
故 nr |(1,1,1) Fx, Fy, Fz |(1,1,1) 4, 6, 2 ,
cos 2 ,
14
cos 3 ,
14
cos 1 .
f lim f ( x0 x, y0 y) f ( x0 , y0 ) lim fx ( x0 , y0 )x f y ( x0 , y0 )y o( )
l (x0 ,y0)0+
0+
fx ( x0 , y0 )cos f y ( x0 , y0 )cos
y
l
• P
且 P U( p). = | PP | (x)2 (y)2 ,
y
若 lim f ( x0 x, y0 y) f ( x0 , y0 )
P
••
x
0+
o
f
x
则称此极限为 z f ( x, y)在P处沿方向 l 的方向导数, 记为 l (x0 , y0)
l 0
z
高等数学讲义课件 第7节 方向导数及梯度
u z P
6x2 8 y2 14. z2
P
故 u (ucos ucos ucos ) 11.
n P x
y
z
7
P
三、梯度的概念
方向导数公式 f f cos f cos f cos
l x
y
z
令向量 G f , f , f x y z
l 0 (cos , cos , cos )
| gradf ( x, y) |
f
2
f
2
.
gradf
x y
当 f 不为零时, x
P gradf
x轴正向与梯度方向的夹角的正切为
tan f / f
y x
在几何上 z f ( x, y) 表示一个曲面
曲面被平面 z c
所截得
z z
f c
(
x,
y) ,
所得曲线在xoy面上投影如图
第七节 方向导数与梯度
一、问题的提出 二、方向导数的定义 三、梯度的概念
一、问题的提出
实例:一块长方形的金属板,四个顶点的坐标是 (1,1),(5,1),(1,3),(5,3).在坐标原点处有一个 火焰,它使金属板受热.假定板上任意一点处的 温度与该点到原点的距离成反比.在(3,2)处有一 个蚂蚁,问这只蚂蚁应沿什么方向爬行才能最快 到达较凉快的地点?
y f ( x, y) c2 gradf ( x, y)
P 梯度为等高线上的法向量
f ( x, y) c 等高线
f ( x, y) c1
o
x
梯度与等高线的关系:
函数 z f ( x, y) 在点 P( x, y)的梯度的方向与点 P 的等高线 f ( x, y) c 在 这点的法线的一个方向相 同,且从数值较低的等高 线指向数值较高的等高线, 而梯度的模等于函数在这 个法线方向的方向导数.
江苏专转本高等数学 第八章 第七节 方向导数与梯度

,cos
2 b.
22 a2 b2
机动 目录 上页 下页 返回 结束
12/29
又
z x
(
a
,
b
)
2x a2
x
a
2, a
22
2
z y
(
a, 2
b) 2
2y b2
y
b 2
2, b
z
z
cos z
cos
l ( a , b ) 22
x ( a , b ) 22
y ( a , b ) 22
2 a2 b2 . ab
设 el cos i cos
j 是方向l 上的单位向量,
由方向导数公式知
f f cos f cos (f , f ) (cos ,cos )
l x
y
x y
gradf
( x,
y) el
|
gradf
( x,
y)
| cos ,
其中
( gradf
( x,
y) , el )
当 cos 1时 , f 有最大值.
z f ( x, y)在点 P0 ( x0 , y0 ) 的梯度,记为
gradf ( x0 , y0 ) fx ( x0 , y0 )i f y ( x0, y0 ) j .
【注】梯度是定义域所在空间(坐标系)内 的一个向量.
机动 目录 上页 下页 返回 结束
17/29
若f
(
x,
y)在点 P0可微
f (x,
cos
y, z),它在空间一点 P( x, y, z)沿
,cos )的方向导数 ,可定义为
f lim f ( x t cos , y t cos , z t cos ) f ( x, y, z)
2019-D87方向导数与梯度高等数学-文档资料

x ( c x o ) 2 , s ( yy )2 c( o z )2 ,,szco s
则称 f 为函数在点 P 处沿方向 l 的方向导数.
l
机动 目录 上页 下页 返回 结束
定理: 若函 f(x,y,z数 )在 P (点 x,y,z)处,可微
说明: 函数的方向导数为梯度在该方向上的投影.
2. 梯度的几何意义
机动 目录 上页 下页 返回 结束
对函 zf数 (x,y),曲 线 zzf(C x,y)在xo面 y 上的 影 L*:f(x,y)C称为函数 f 的等值线 .
设fx, fy不同时为, 则零L*上点P 处的法向量为
(fx, fy) PgrafdP 同样, 对应函数 uf(x,y,z), 有等值面(等量面) f(x,y,z)C,
机动 目录 上页 下页 返回 结束
u 162831 41 11
n P 14
7
机动 目录 上页 下页 返回 结束
二、梯度
方向导数公式 ffc o sfco s fcos
l x y
z
令向量
Gxf,
f, y
f z
l0(co ,cso ,s co )s
fco sfco sfco so()
x
y
z
故
f limffco sfco sfco s
l 0 x
y
z
机动 目录 上页 下页 返回 结束
对于二元函数 f(x,y), 在点 P(x,y)处沿方 l(方 向 向角
为, ) 的方向导数为
指向外侧的法向量, 求函数 u 6x2 8y2 在点P 处沿
方向 n的方向导数.
z
8-7 方向导数与梯度

z
z f ( x, y)
G
F
M0
E
o p
x
0
y
p
z l
l
是用过射线l且垂直于xoy面的半平面
P0
截曲面z f ( x , y )所得曲线在点M 0处的半 切线M 0 N相对于射线l的斜率.
二、方向导数的计算
定理:如果z f ( x , y )在点( x0 , y0 )可微,那 么函数在该点沿任一方 向的方向导数都存在. 且
{ f x , f y , f z } gradf
M
f ( x, y, z ) C
第七节 方向导数与梯度
要点:
f 方向导数的定义: l
p0
lim
沿l
f ( p) f ( p0 ) p0 p
p p0
lim
0
z
f 意义: f . p0 反映函数 在点 p0沿方向l的瞬时变化率 l 方向导数与偏导数的联系与区别.
2 2
的方向导数最大?
解: 梯度向量 grad z { z , z } ( 0 ,1) x y { 2 x , 2 y } ( 0 ,1 )
z
z x2 y2
{0,2}
o
x
(0,1) {0,2}
y
{1,0}
z x 2 y 2在点(0,1)沿着梯度向量{0,}方向 2 (即y轴正向)的方向导数最 大, 最大值为 . 2
o z z 梯度向量 grad z { , } ( 0 ,1) x x y {2 x ,2 y } ( 0,1) {0,2}
2 2
第七节 方向导数与梯度课件
到点 Q ( 2 , 1 ) 的方向的方向导数. 解
r 即为 PQ { 1 , 1 } , 这里方向 l r 故 x 轴到方向 l 的转角 . 4 z e 2 y (1, 0 ) 1; z 2 xe 2 y (1, 0 ) 2, x (1, 0 ) y ( 1 , 0 )
设 x 轴正向到射线
l 的转角
P U ( p ). o
为 , 并设 P ( x + x , y + y )
P
x
y
为 l 上的另一点且
(如图)
x
扬州环境资源职业技术学院基础部
| PP | ( x )2 + ( y )2 ,
且 z f ( x + x , y + y ) f ( x , y ),
扬州环境资源职业技术学院基础部
梯度的概念可以推广到三元函数 三元函数 u f ( x , y , z ) 在空间区域 G 内具有 P ( x, y,z) G , 一阶连续偏导数,则对于每一点 都可定义一个向量(梯度)
f r f r f r gradf ( x , y , z ) i + j + k. x y z
因为
f 2x 2 , 2 2 x (x + y )
1 2x 2y gradu 2 2 i 2 j 2 2 2 2 2 x +y (x + y ) (x + y )
扬州环境资源职业技术学院基础部
小结
1、方向导数的概念
(注意方向导数与一般所说偏导数的区别) 2、梯度的概念 (注意梯度是一个向量) 3、方向导数与梯度的关系 梯度的方向就是函数 f ( x , y ) 在这点增长最快的方向.
高等数学 8-7.方向导数与梯度
π 方向导数达到最大值 2 ; 故 1)当α = 时, ( 4 5π π (2)当α = 时, 方向导数达到最小值− 2 ; 4 3π 7π π π (3)当α = 和α = 时,方向导数等于 0. 4 4
推广可得三元函数方向导数的定义
对于三元函数 u = f ( x, y, z ),它在空间一点 P( x0 , y0 , z0 ) 沿着方向 l = (cosα ,cos β ,cos γ ) 的方 向导数 ,可定义为 f ( x0 + ∆x, y0 + ∆y, z0 + ∆z ) − f ( x0 , y0 , z0 ) ∂f = lim ρ ∂l ρ →0
方向导数仍可理解 为曲线上一点处右 切线在新坐标系下 的斜率. 的斜率
y
t
P = ( x 0 , y0 )
v = (cos α ,sin α )
方向导数的物理意义:
设一质点 P 在三维空间的运动轨迹为 (时间t) 时间
x = x0 + t cos α , y = y0 + t sin α , z = f ( x0 + t cos α , y0 + t sin α )
y
l
• P′
•
•
ϕ
∆x
∆y
x
(如图) 如图)
ρ f ( x + ∆x , y + ∆y ) − f ( x , y ) 是否存在? 是否存在? lim ρ →0 ρ
上述极限若存在, 定义: 上述极限若存在 则称此极限为函数 f 在 P处沿方向 l 的方向导数 记为 方向导数, 处沿方向
∵ | PP ′ |= ρ = ( ∆x )2 + ( ∆y )2 , 且 ∆z = f ( x + ∆x , y + ∆y ) − f ( x , y ), ∆z 考虑 , 当 P′沿着 l 趋于 P时,
第七节 方向导数与梯度
第七节 方向导数与梯度 ㈠本课的基本要求理解方向导数和梯度的概念并掌握其计算方法 ㈡本课的重点、难点方向导数和梯度的概念为重点、其计算方法为难点 ㈢教学内容 一.方向导数偏导数反映的是函数沿坐标轴方向的变化率。
但许多物理现象告诉我们,考虑函数沿坐标轴方向的变化率是不够的。
例如,热空气是向冷的地方流动,气象学中就是确定大气温度、气压沿着某些方向的变化率。
因此我们有必要来讨论函数沿任一指定方向的变化率问题。
设l 是xoy 平面上以),(000y x P 为始点的一条射线,)cos ,(cos βα=l e 是与l 同方向的单位向量。
射线l 的参数方程为)0(,cos ,cos 00≥+=+=t t y y t x x βα。
设函数),(y x f z =在点),(000y x P 的某个邻域)(0P U 内有定义,)cos ,cos (00βαt y t x P ++为l 上另一点,且)(0P U P ∈。
如果函数增量),()cos ,cos (0000y x f t y t x f -++βα与P 到0P 的距离t PP =0的比值ty x f t y t x f ),()cos ,cos (0000-++βα,当P 沿着l 趋于0P (即+→0t )时的极限存在,则称此极限为函数),(y x f 在点0P 沿方向l 的方向导数,记作),(00y x lf ∂∂,即lim0),(00+→=∂∂t y x lf ty x f t y t x f ),()cos ,cos (0000-++βα。
⑴注意 在方向导数中,由于ρ总是正的,因此是单向导数,即方向导数是函数沿射线方向的变化率。
而在偏导数中,x ∆与y ∆的值则可正可负,因此,如果函数),(y x f z =在点P 沿着x 轴正向}0,1{=i ,y 轴正向}1,0{=j 的方向导数存在,其值就是y x f f ,;如果函数),(y x f z =在点P 沿着x 轴负向}0,1{-=-i ,y 轴负向}1,0{-=-j 的方向导数存在,其值就是y x f f --,。
方向导数与梯度
设方向l的方向角为 , ,
x cos , y cos , z cos ,
f同理,f当co函s数在此f c点os可 微 时f ,c那os末 函数在该点 沿其任中l意(c方osx向 ,lc的os方向,c导oys数)是都l存的在方z,向且向有量.
16
方向导数与梯度
1991年研究生考题, 计算,5分
存在时,
f x
f y
是否一定存在
7
方向导数与梯度
例如, 函数 z 的方向导数
fflimlimf (fx(xx, yx,y)y) f (fx(,xy,)y)
lx 0x0
x
x2 y2在点(0, 0)处沿方向 l i
f l
f i
lim |x|0
(x)2 02 0 lim x 1,
第七节 方向导数与梯度
directional derivative and gradient
方向导数概念与计算公式 梯度概念与计算 数量场与向量场的概念 小结 思考题 作业
1
第八章 多元函数微分法及其应用
方向导数与梯度
一、方向导数概念与计算公式
设有二元函数 z f ( x, y),考虑函数在某点
l P0 x P0
y P0
13
方向导数与梯度
问在怎样的方向上此方向导数有 (1) 最大值; (2) 最小值; (3) 等于零?
f cos sin 2 sin( p )
l (1,1)
4
故 (1) 当 p 时,方向导数达到最大值
4
2;
(2) 当 5p 时, 方向导数达到最小值 2;
4
(3) 当 3p 和 7p 时,方向导数等于 0.
例 设n 是曲面2x2 3 y2 z2 6在点P(1,1,1)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
备用题 1. 函数
处的梯度
2 (1, 2, 2) 9
在点
(92考研)
解:
则 注意 x , y , z 具有轮换对称性
2 (1, 2, 2) 9
机动 目录 上页 下页 返回 结束
2. 函数 u ln(x y2 z2 )在点A( 1 , 0 , 1) 处沿点A
指向 B( 3, -2 , 2) 方向的方向导数是
1. 定义
向量 G 称为函数 f (P) 在点 P 处的梯度 (gradient), 记作grad f , 即
f, x
f, y
f z
同样可定义二元函数
在点P(x, y) 处的梯度
说明: 函数的方向导数为梯度在该方向上的投影. 2. 梯度的几何意义
机动 目录 上页 下页 返回 结束
l
函数沿 l os f y cos fz cos (1,1,1)
机动 目录 上页 下页 返回 结束
(2) grad f M (2 , 1 , 0)
cos
l
l
arccos 6
130
f l M
grad f M
(势)
梯度场 grad f (P)
(向量场)
注意: 任意一个向量场不一定是梯度场.
机动 目录 上页 下页 返回 结束
例5. 已知位于坐标原点的点电荷 q 在任意点
处所产生的电位为 u q ( r x2 y2 z2 ), 试证
4 r
gradu E
(场强
E
4π
q ε
r2
r
f f cos f cos f cos
l x
y
z
• 二元函数
在点
沿方向 l (方向角为
, )的方向导数为
f f cos f cos
l x
y
机动 目录 上页 下页 返回 结束
2. 梯度 • 三元函数
在点
处的梯度为
grad
l 0 x
y
z
机动 目录 上页 下页 返回 结束
对于二元函数 f (x, y), 在点P(x, y)处沿方向 l (方向角
为, ) 的方向导数为
f lim f (x x, y y) f (x, y)
l 0
y lP
l
fx (x, y) cos f y (x, y) cos
对函数
z
f
(x,
y) ,曲线
z
f (x, zC
y) 在
xoy
面上的投
影L* : f (x, y) C 称为函数 f 的等值线 .
设 f x , f y 不同时为零 , 则L*上点P 处的法向量为
( f x , f y ) P grad f P
同样, 对应函数 有等值面(等量面)
y
f c3
f c2
P f c1
当各偏导数不同时为零时, 其上
点P处的法向量为 grad f P .
o
x
(设c1 c2 c3)
函数在一点的梯度垂直于该点等值面(或等值线) ,
指向函数增大的方向.
机动 目录 上页 下页 返回 结束
3. 梯度的基本运算公式
(2) grad (C u) C grad u (4) grad (u v ) u grad v v grad u
1. 设函数 (1) 求函数在点 M ( 1, 1, 1 ) 处沿曲线
在该点切线方向的方向导数; (2) 求函数在 M( 1, 1, 1 ) 处的梯度与(1)中切线方向
的夹角 .
2. P73 题 16
机动 目录 上页 下页 返回 结束
解答提示:
1. (1)
曲线
在点
M (1,1,1) 处切线的方向向量
机动 目录 上页 下页 返回 结束
例4.
处矢径 r 的模 , 试证 证:
f (r)
x2
x y2
z2
f
(r) x r
f (r) f (r) y ,
y
r
f (r) f (r) z
z
r
grad
f
(r)
f
(r)
i
f
(r)
j
f
(r)
k
z
x
cos 1 , cos 4
17
17
yP o 1 2 x
60 17
机动 目录 上页 下页 返回 结束
例3. 设 n 是曲面
在点 P(1, 1, 1 )处
指向外侧的法向量, 求函数
在点P 处沿
方向 n 的方向导数.
解: n (4x , 6 y , 2z) P 2(2 , 3 , 1)
2. P73 题 16
u
2x0
2x0 a2
2 y0
2 y0 b2
2z0
2z0 c2
n M0
2
x02 a4
y02 b4
z02 c4
2
x0 2 a4
y02 b4
z02 c4
机动 目录 上页 下页 返回 结束
作业
P51 2,3,6,7,8,9,10
第八节 目录 上页 下页 返回 结束
y
z
P
f (r) 1 (x
i y
jz
k)
r
r
o
y
f (r) 1 r f (r) r0
x
r
机动 目录 上页 下页 返回 结束
三、物理意义
函数
场
(物理量的分布)
数量场 (数性函数) 如: 温度场, 电位场等
向量场(矢性函数) 如: 力场,速度场等
可微函数 f (P)
第七节
第八章
方向导数与梯度
一、方向导数 二、梯度 三、物理意义
机动 目录 上页 下页 返回 结束
一、方向导数
定义: 若函数 f (x, y, z) 在点 P(x, y, z) 处
沿方向 l (方向角为 , , ) 存在下列极限:
l
P
lim f
0
P(x, y, z)
lim
o
x
特别:
• 当 l 与 x 轴同向 0, 时, 有 f f
2
l x
• 当 l 与 x 轴反向 , 时, 有 f f
2
l x
机动 目录 上页 下页 返回 结束
例1. 求函数
在点 P(1, 1, 1) 沿向量
3) 的方向导数 .
f f cos f cos f cos
l x
y
z
l
P
证明: 由函数 f (x, y, z) 在点 P 可微 , 得
P(x, y, z)
f f x f y f z o( )
x
y
z
o( )
故 f lim f f cos f cos f cos
方向余弦为 cos 2 , cos 3 , cos 1
14
14
14
而
u
x P z
6x 6x2 8y2
P
6 14
同理得
u 1 6 2 8 3 141 11
n P 14
7
机动 目录 上页 下页 返回 结束
二、梯度
方向导数公式 f f cos f cos f cos
0
f
(x
x,
y
y, z
z)
f
(x,
y,
z)
记作
f l
则称 f 为函数在点 P 处沿方向 l 的方向导数.
l
机动 目录 上页 下页 返回 结束
定理: 若函数 f (x, y, z) 在点 P(x, y, z) 处可微 ,
则函数在该点沿任意方向 l 的方向导数存在 , 且有
0
)
证: 利用例4的结果 grad f (r) f (r) r 0
grad u
q
4 r
r
0
4
q
r
2
r
0 E
这说明场强: 垂直于等位面, 且指向电位减少的方向.
机动 目录 上页 下页 返回 结束
内容小结
1. 方向导数
• 三元函数
在点
沿方向 l (方向角
为, , ) 的方向导数为
1 2
. (96考研)
提示:
则
{cos , cos , cos }
ln(x 1)
ln(1 y2 1)
1 2
机动 目录 上页 下页 返回 结束
解: 向量 l 的方向余弦为
u l
P
2xyz
2 14
x2y
3 14
机动 目录 上页 下页 返回 结束
例2. 求函数
在点P(2, 3)沿曲线
朝 x 增大方向的方向导数.
解:将已知曲线用参数方程表示为
x y
x x2
1
它在点 P 的切向量为 (1, 2x) x2 (1, 4)
l x