推块式分拣系统
基于PLC的自动控制分拣系统的设计23759

PLC控制是目前工业上最常用的自动化控制方法,由于其控制方便,能够承受恶劣的环境,因此,在工业上优于单片机的控制。
PLC将传统的继电器控制技术、计算机技术和通信技术融为一体,专门为工业控制而设计,具有功能强、通用灵活、可靠性高、环境适应性强、编程简单、使用方便以及体积小、重量轻、功耗低等一系列优点,因此在工业上的应用越来越广泛。
本文主要讲述PLC在材料分拣系统中的应用,利用可编程控制器( PLC) ,设计成本低、效率高的材料自动分拣装置。
以PLC 为主控制器,结合气动装置、传感技术、位置控制等技术,现场控制产品的自动分拣。
系统具有自动化程度高、运行稳定、精度高、易控制的特点,可根据不同对象,稍加修改本系统即可实现要求。
关键词: 可编程控制器,分拣装置,控制系统,传感器目录摘要............................................................................................................................. 错误!未定义书签。
目录.. (I)绪论 (1)第1章材料分拣装置结构及总体设计 (1)1.1材料分拣装置工作过程概述 (2)1.2系统的技术指标 (3)1.3系统的设计要求 (3)第2章控制系统的硬件设计 (4)2.1系统的硬件结构 (4)2.2系统关键技术 (4)2.3检测元件与执行装置的选择 (7)第3章控制系统的软件设计 (14)3.1控制系统流程图设计 (14)3.2控制系统程序设计 (15)第4章控制系统的调试 (21)4.1硬件调试 (21)4.2软件调试 (21)4.3整体调试 (22)结论 (22)展望 (22)致谢 (23)参考文献 (24)附录 (24)绪论分拣是把很多货物按品种从不同的地点和单位分配到所设置的场地的作业。
按分拣的手段不同,可分为人工分拣、机械分拣和自动分拣。
材料自动分拣系统的设计与研究

X 1 00 X 1 0l
X l 07 X l O3 输 X 0 O0
S W2 F S W3 F
SW F4 S W5 F S A
气缸 2 动作限位开关 气缸 3 动作 限位开关
2 硬件 系Байду номын сангаас
21 基 本 结 构 .
三菱 P CI ) 分拣 系统接 口 o L (O ] 1
X 1 02 S Wl F
备注
气缸 1 作限位 开关
本 系统采用 台式结构 , 内置电源 . 有竖井式材料入料槽 . 滑板式 产 品出料槽 , 转接板上还设计 了可 与 P C连接的转接 1 。同时 . 带 L : 3 输送 作为传动机构 , 采用直 流电动机驱动 . 不同材质敏感 的三种传感 器 对 分别固定 在网孔板上 。 整个控制系统由气动部件 和电气部件两大部分 组成。气动部 分由减压 阀、 气压指示表 、 气缸等部 件组成 : 电气部分由 P C 电感传感器 、 L、 电容传感 器 、 色传感器 、 电传感器 、 颜 光 直流 电机 、 开关电源 、 阀等部件组成。其外形结构、 电磁 各传感器位置见图 1 。
21 年 01
第 2 期 9
S IN E&T C N L G F R A I N CE C E H O O YI O M TO N
O科教前沿 0
科技信息
材料 自动分拣 系统的设计与研究
李 博 ( 大连 交通 大学软 件学 院 辽宁 大连 16 5 ) 0 2 1
【 要】 摘 为解决人工分拣货物劳动强度 大、 效率低等缺点 , 文以 P C为主控制 器, 本 L 结合气动装置 、 传感 器、 位置控制等技术 , 运用梯形 图 编程 , 实现对铁块 、 铝块及蓝 色、 色两种塑料块共 四种材料的 自动分拣 。系统具有 自动化程度 高、 黄 运行稳定、 控 制的特点 。并可根据不 同对 易 象, 稍加修 改本系统 即可 实现要求。 【 关键词 】L 材料分拣 ; P C; 传感器
基于PLC的球形水果大小自动分拣系统设计

基于PLC的球形水果大小自动分拣系统设计摘要:随着经济的发展,目前我国水果产业在水果产量和品质逐年递增的情况下,总的收入却一直提不上来的主要原因是我国的水果产后处理水平不足。
与众多产后处理流程比如上线、清洗、打蜡、烘干等较为容易实现的操作相比较,水果的分拣相对复杂,其技术也是水果产后处理的关键。
目前的水果分拣技术有的较为简单无法满足精细分拣的需要,有的较为复杂,成本较高。
关键词:PLC;球形水果;大小;自动分拣系统;设计引言自动分拣系统作为先进操作工具,其分拣速度较快,能够有效提高物流配送效率,帮助工作人员实现大批量以及连续性的货物分拣。
在大规模生产过程中,采用自动分拣流水线工作方式,可以不受人工、时间以及气候等影响,实现连续工作,提升工作效率。
自动分拣系统虽能够有效地分拣货物,但需要在分拣之前设置输入程序,而相对于水果这种表面有可能存在损坏的物品,仅使用自动分级分拣系统,无法对其实行有效分拣。
为此,如何提升产品无损分拣成为该领域研究的热点问题。
1项目来源随着我国经济的快速发展,许多中、大型农业户,中、大型企业蓬勃发展,使水果产量持续增加。
近年来,互联网行业的兴起,水果行业“直播带货”已然成为一种潮流。
伴随我国贸易量逐年上升,水果商品化的要求也日益增加。
但我国水果参与国际贸易的比例一直很低,出口量不到国际水果贸易的5%,这一现状不能很好地推动我国水果产业走向世界,经研究发现其中一个重要原因就是我国水果商品化处理技术的落后,使得水果品质和口感直线下降,从而水果的收益大打折扣,也导致国内的水果很难走出去,在国际市场所占比重较小。
本团队为解决以上问题,结合国内现有的技术,设计研发了基于图像识别产品分拣系统。
该设备能够很好地实现水果生产走向商品化的过程,带来了更高的经济收益。
目前,我国关于PLC技术的智能化分拣机器目前市场上还没有技术成熟且安全高效的产品,本项目产品的问世更好的弥补了市场空缺。
2PLC控制的分拣系统设计为了更好地将水果进行分拣,分拣系统的设计主要以功能模块的实现为主。
货物分拣控制系统设计(终版)
毕业设计(论文)课题名称货物分拣控制系统设计学生姓名学号系(院)、年级专业电气工程系指导教师职称讲师2017年5月11日摘要为了适应当下物联网的对货物分拣高效率的需求,设计这款货物分拣控制系统设计,采用的是货码识别系统结合位置传感器,对货物在传送带运送过程中进行实时监控并操作分拣。
该设计大体分为两个部分,一是利用位置传感器探测货物位置,然后出发条码识别器对货物上的货码进行识别,并把识别到的信息传给系统;二是由系统进行处理分析后分配任务给挡板,由挡板把对应货码的货物推入指定滑槽中,从而对货物进行分拣。
其中信息处理系统是使用PLC作为控制器,分别对分拣装置元器件操控的。
对系统的运行检测后,可知该系统运行拥有稳定可靠且分拣效率高和出错率低等特点。
关键词:货物分拣控制系统;条码识别器;PLCABSTRACTIn order to adapt to the demand for goods sorting efficiency of Internet of things, the design of this kind of goods sorting control system design, combined with the position sensor is goods code recognition system, real-time monitoring of the goods in the process of the conveyor belt and sorting operation.The design can be divided into two parts, the first part is to use the sensor to detect the goods location, and then start the cord scanner on the goods code, which can identify the goods and pass to identify the information to the system;The second part is processed by the system after the analysis of distribution of tasks to baffle, the baffle push the corresponding goods yards of goods into the designated chute, thereby to sorting the goods.The information processing system is the use of PLC as the controller, respectively for sorting device components control.Run the test to the system, shows the system has stable and reliable operation and high sorting efficiency and low error rate.Keywords: cargo sorting control system;cord scanner;PLC目录摘要 (I)ABSTRACT (II)1前言 (1)1.1 课题研究目的 (1)1.2 分拣系统的发展 (1)1.3 研究课题的主要内容 (2)2 货物分拣系统方案设计 (4)2.1 系统方案设计 (4)2.2 系统方案论证 (4)2.3 PLC的选型 (5)3 货物分拣系统的硬件设计 (6)3.1 PLC各个组件的选择及工作原理 (6)3.2 传感器的选择与运用 (8)3.3 I/O接口的选择及PLC的接线 (10)4 货物分拣系统的设计 (14)4.1 顺序控制功能图的设计 (14)4.2 梯形图的设计及说明 (15)5 分拣装置的调试 (18)5.1 调试环境 (18)5.2 软件系统的调试 (18)5.3 硬件的调试 (20)5.4 软硬件的结合调试 (21)结语 (21)参考文献 (22)附录 (23)1前言1.1 课题研究目的自动货物分拣系统在现在物联网流行的时代,有着极其重要的作用。
基于PLC的物料自动分拣系统设计 毕业设计

基于PLC的物料自动分拣系统设计摘要随着工业自动化的普及和发展,生产过程中物料分拣的效率问题越来越引起人们的关注。
重复繁琐的人工分拣物料过程已不能满足企业追求的生产效益和如今社会的需求。
人、机器与物料三者关系的协调,已成为我们需要解决的重要问题之一。
理所当然,用尽可能少的人力控制机器分拣物料来完成如期的生产任务是最佳的选择模式——即采用自动化技术代替人工分拣物料的过程。
本文主要讲述PLC在材料分拣系统中的应用,利用可编程控制器( PLC) ,设计成本低、效率高的材料自动分拣装置。
以PLC为主控制器,结合气动装置、传感技术、位置控制等技术,控制产品的自动分拣。
系统具有自动化程度高、运行稳定、精度高、易控制的特点,可根据不同对象,稍加修改本系统即可实现要求。
关键词:传感器PLC 物料分拣目录第1章绪论 (1)1.1 论文研究背景 (1)1.2 研究现状及发展趋势 (1)1.3 论文研究的意义 (1)1.4 本论文研究的主要内容 (2)第2章物料分拣装置结构及总体设计 (3)2.1 材料分拣装置工作过程概述 (3)2.2 系统的技术指标 (4)2.3 系统的设计要求 (4)2.3.1功能要求 (4)2.3.2系统的控制要求 (4)第3章控制系统的硬件设计 (6)3.1系统的硬件结构 (6)3.2 系统关键技术 (6)3.2.1系统对PLC的要求 (6)3.2.2 PLC的选择 (7)3.2.3 PLC的输入输出端子分配 (9)3.2.4 PLC输入输出接线端子图 (10)3.3 检测元件与执行装置的选择 (11)3.3.1 输入电气元件 (11)3.3.2 输出电气元件 (16)3.3.3 执行电气元件 (18)第4章控制系统的软件设计 (22)4.1控制系统流程图设计 (22)4.2 西门子编程软件、模拟仿真软件 (23)4.2.2 西门子仿真软件 (23)4.3 控制系统程序设计 (24)第5章控制系统的调试 (30)5.1硬件调试 (30)5.2软件调试 (30)第6章总结 (31)参考文献 (32)致谢 (33)附录 (34)第1章绪论1.1 论文研究背景在现代工业中,生产过程的机械化、自动化已成为突出的主题。
自动线分拣单元控制系统设计(毕业论文doc)之欧阳与创编

摘要本课题主要运用气动控制技术、机械技术(机械传动、机械连接等)、传感器应用技术、PLC控制技术以及变频器技术等专业核心课程展开自动线分拣单元控制系统设计。
分拣单元是自动生产线的最后一单元,是整条生产线中不可缺少的自动生产设备,它靠气动传动,依靠气缸等执行元件推动物料,在控制系统中起着举足轻重的作用,而控制运行的PLC系统要求也越来越高,要求达到系统运行的“稳”、“准”、“快”的运行目的。
该系统主要由PLC、逻辑控制电路组成,其中包括交流电机、变频器、传感器和笔形气缸组成为一体的自动控制系统。
本机控制单元采用三菱公司的PLC对机器进行全过程控制,其控制系统结构简单,运行效率高,易于理解与掌握。
关键词:PLC 交流电机变频器编码器传感器目录摘要........................................................ (Ⅰ)第一章绪论 (1)第二章可编程控制器的概述 (3)2.1 PLC的基本概念 (3)2.1.1 PLC的特点 (3)2.1.2 PLC的发展阶段 (5)2.2 PLC的分类与应用及前景 (6)2.2.1 PLC的分类 (6)2.2.2 可编程控制器PLC的应用与前景 (7)2.3 可编程控制器的几种编程语言 (9)2.3.1 梯形图编程语言 (9)2.3.2 功能块图编程语言 (10)2.4 传感器的概述 (10)2.4.1 磁性传感器的工作原理 (11)2.4.2 电感式接近开关的工作原理 (11)2.4.3 光电式接近开关的工作原理 (12)2.4.4 光纤传感器的工作原理 (13)2.4.5 金属传感器的工作原理 (14)2.4.6 电磁换向阀的工作原理 (14)2.5 气动装置的概述 (15)2.5.1 气泵的认识与选择 (15)2.5.2 空气压缩机 (16)2.5.3 储气罐 (17)2.5.4 压力控制阀 (17)2.5.5 辅助元件 (17)2.5.6 气动执行元件 (18)第三章材料分拣装置硬件系统 (20)3.1 基本功能及控制要求 (20)3.2 系统的结构设计 (20)3.3 材料分拣装置的组成及各部的功能 (21)第四章PLC硬件设计 (24)4.1 PLC选型 (24)4.2 I/O地址分配 (24)4.3 I/O连接图 (25)第五章PLC软件设计 (26)5.1 程序流程图 (26)5.2 梯形图及说明 (27)5.3 PLC指令 (29)第六章控制系统的调试 (30)6.1 硬件调试 (30)6.2 软件调试 (30)6.3 整体调试 (30)结论........................................................ .. (32)致谢........................................................ .. (33)参考文献........................................................ .34附录一........................................................ (35)附录二........................................................ (36)第一章绪论随着科学技术的发展,工业自动化程度的不断提高,市场竞争的激烈,传统的人工分拣生产效率低,成本高,企业竞争力差,已经无法满足现代化生产的需要。
PLC分拣系统流程图
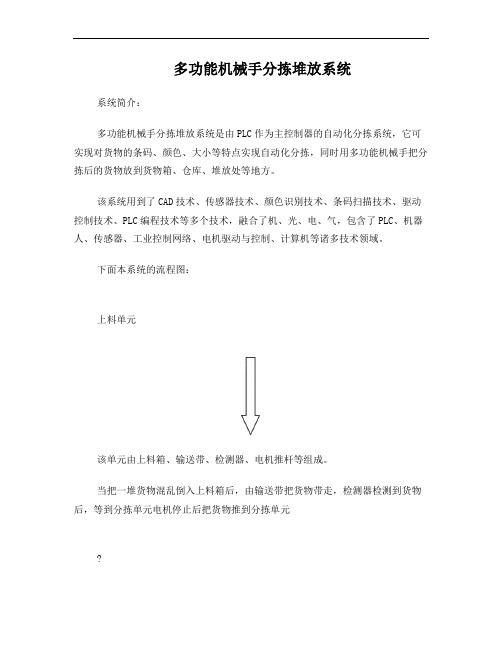
多功能机械手分拣堆放系统系统简介:多功能机械手分拣堆放系统是由PLC作为主控制器的自动化分拣系统,它可实现对货物的条码、颜色、大小等特点实现自动化分拣,同时用多功能机械手把分拣后的货物放到货物箱、仓库、堆放处等地方。
该系统用到了CAD技术、传感器技术、颜色识别技术、条码扫描技术、驱动控制技术、PLC编程技术等多个技术,融合了机、光、电、气,包含了PLC、机器人、传感器、工业控制网络、电机驱动与控制、计算机等诸多技术领域。
下面本系统的流程图:上料单元该单元由上料箱、输送带、检测器、电机推杆等组成。
当把一堆货物混乱倒入上料箱后,由输送带把货物带走,检测器检测到货物后,等到分拣单元电机停止后把货物推到分拣单元?该单元由条码扫描仪、金属检测仪、尺寸检测仪、颜色检测器、步进电机控制模块、单片机电路系统等组成。
当上料单元把货物送到该单元后,经过输送带传送到检测系统,依次通过各个检测模块,如果货物特点符合检测模块待检测特点,通知控制器,步进电机停止,然后该模块推送机构把货物推到货物暂停区。
同时单片机系统检测后可以记录各个推送机构推放货物的个数,用来记录数据,便于货物管理。
?该单元用于货物搬运及堆放,由机械手模块、步进电机驱动控制器、垂直水平控制装置等组成。
当检测单元把货物推放到货物暂停区后,由控制器通知机械手去相应暂停区取相应货物,然后控制器根据下面仓库系统提供的信息来判别把货物堆放到哪里,然后控制机械手通过垂直水平移动装置把货物堆放到相应位置。
?该单元为物流存储单元,该单元供机械手放置提取的货物,包括物料箱部分、仓库部分、“魔方”平台。
本系统设计了三种物流放置方案:1、货物经过滑槽直接进入物料箱。
本系统设计了六个物流箱,供给货物存储。
1、机械手把货物放到仓库。
该仓库有24个仓位组成,每个仓位对应一个检测器,用来检测该仓位是否有货物,控制器根据各个仓位提供的信息把货物放置到相应位置。
2、机械手进行“魔方”堆放。
基于plc的物流分拣系统设计
基于plc的物流分拣系统设计物流分拣系统是将物流过程中的货物按照一定规则进行分类、计数、包装、装载等处理,以达到快速、精准、高效的物流服务目的。
本文将基于PLC技术,设计一个物流分拣系统。
一、系统设计方案1.物流分拣系统流程系统的整体流程如下:(1)装货阶段:货物通过拆单完成入库,由前置设备提供订单信息,将货物进行标记,并放置于传送带上;(2)分拣阶段:传送带将货物传送至下方的分拣系统,根据订单信息进行分类,将货物分到相应的区域;(3)包装阶段:将已经分拣好的货物进行包装,打印标签,并送至发货区域。
2.系统结构本物流分拣系统采用PLC+触摸屏控制器结构,具体包括以下模块:传送带模块、分拣模块、包装模块、监控模块和前置设备模块。
3.PLC控制器本系统采用富士PLC控制器,具体型号为FX3U-32MT/ES,其主要目的是对物流分拣系统进行整体控制。
4.触摸屏控制器本系统采用富士触摸屏控制器,具体型号为UTMC-101,用于向运维人员实时反馈 system 状态,并支持系统的强大警报能力。
二、系统运行流程1.工作原理本物流分拣系统主要是通过传送带、分拣模块和包装模块的协同工作,将运输来的货物进行分类、计数、包装等处理操作,实现物流的高效性。
2.系统运行流程本系统的整体运行流程如下:(1)物流准备阶段:货物通过前置设备模块入库,并将订单信息传入系统。
(2)物流分拣阶段:传送带接收到货物,并将货物推入分拣模块,根据订单信息进行分类。
(3)物流包装阶段:已经分类的货物通过包装模块进行封装,并打印标签。
(4)发货阶段:已经包装好的货物通过传送带转运至发货区域。
三、系统设计要点1.传送带控制部分传送带控制部分主要由PLC和触摸屏控制器组成,实现传送带的启动、停止、加速度等控制,并能自动监测传送带的状态,一旦发现异常,及时向运维人员报警。
同时,触摸屏控制器可以对传送带进行参数设置和系统状态监测等。
2.分拣系统控制部分分拣系统控制部分采用触摸屏控制器实现对分拣系统的控制,主要是通过对触摸屏控制器上的信息输入,实现对分拣系统的启动、停止、加速度等控制,并能自动监测分拣系统的状态,一旦发现异常,及时向运维人员报警。