扭摆法测定物体转动惯量
用扭摆法测定物体的转动惯量

用扭摆法测定物体的转动惯量一、实验目的1.用扭摆测定弹簧的扭转常数K 。
2.用扭摆测定几种不同形状物体的转动惯量,并与理论值进行比较。
3.验证平行轴定理。
二、实验仪器1.转动惯量测试仪2.几种待测刚体(空心金属圆柱体、实心塑料圆柱体、木球、验证转动惯量平行轴定理的细金属杆,杆上有两块可以自由移动的金属滑块)三、实验原理1.扭摆的简谐运动将物体在水平面内转过一角度后,在弹簧的恢复力矩作用下,物体就开始绕垂直轴作往返扭转运动。
根据虎克定律,弹簧受扭转而产生的恢复力矩M 与所转过的角度成正比,即θK M -= (1)式中K 为弹簧的扭转常数。
根据转动定律βI M = (2)式中I 为转动惯量,β为角加速度,由(1)式和(2)式得θβIK-= 其中IK=2ω,忽略轴承的摩擦力矩,则有 θωθθβ222-=-==I Kdtd上式表明扭摆运动是简谐振动,且角加速度与角位移成正比,方向相反。
此方程的解为)cos(φωθ+=t A图1 扭摆结构图式中A 为简谐振动的角振幅, φ为初位相,ω为角频率。
此简谐振动的周期为KIT πωπ22==(3) 利用公式(3)式,测得扭摆的周期T ,在I 和K 中任何一个量已知时即可计算出另一个量。
本实验用一个转动惯量已知的物体(几何形状有规则,根据它的质量和几何尺寸用理论公式计算得到),测出该物体摆动的周期,再算出本仪器弹簧的K 值。
若要测量其它形状物体的转动惯量,只需将待测物体安放在本仪器顶部的各种夹具上,测定其摆动周期,由(3)式即可计算出该物体绕转动轴的转动惯量。
2.平行轴定理若质量为m 的物体绕通过质心轴的转动惯量为I 。
,当转轴平行移动距离x 时,则此物体对新轴的转动惯量20mx I I C +=,称为转动惯量的平行轴定理。
四、实验内容与步骤一 用游标卡尺测圆柱体的直径,金属圆筒的内外径等。
(各测量3次)。
用数字式电子台秤分别测出待测物体的质量。
木球体质量见球体上标签,直径取134毫米。
实验扭摆法测定体转动惯量

实验扭摆法测定体转动惯量————————————————————————————————作者:————————————————————————————————日期:实验2-10 扭摆法测物体的转动惯量【引言】转动惯量是刚体转动时惯性大小的量度,是表明刚体特性的一个物理量。
刚体相对于某转轴的转动惯量,是组成刚体的各质元质量与它们各自到该转轴距离平方的乘积之和。
刚体的转动惯量与以下因素有关:刚体的质量:各种形状刚体的转动惯量都与它自身的质量成正比;转轴的位置:并排的两个刚体的大小、形状和质量都相同,但转轴的位置不同,转动惯量也不同;质量的分布:质量一定、密度相同的刚体,质量分布不同(即刚体的形状不同)转动惯量也不同。
如果刚体形状简单,且质量分布均匀,可以直接计算出它绕特定转轴的转动惯量。
对于形状复杂,质量分布不均匀的刚体,计算将极为复杂,通常采用实验方法来测定,例如机械部件、电动机转子和枪炮的弹丸等。
转动惯量的测量,一般都是使刚体以一定形式运动,通过表征这种运动特征的物理量与转动惯量的关系,进行转换测量。
本实验使物体做扭转摆动,由摆动周期以及其它参数的测定计算出物体的转动惯量。
在国际单位制中,转动惯量的单位是2m kg ⋅(千克·米2)。
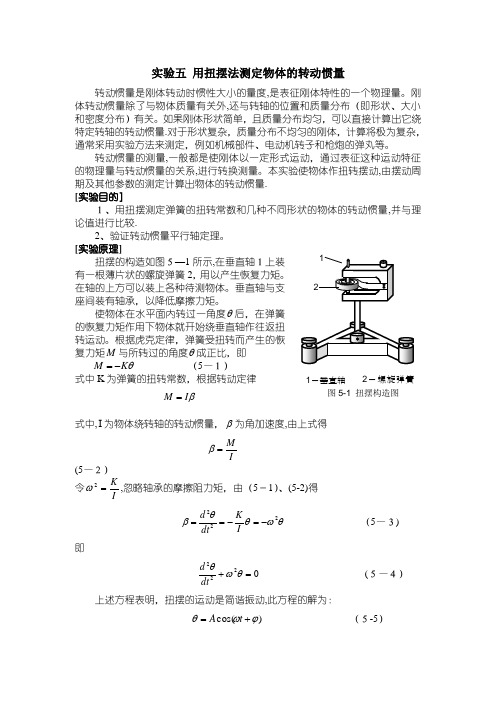
【实验目的】1. 测定弹簧的扭转常数2. 用扭摆测定几种不同形状物体的转动惯量,并与理论值进行比较3. 验证转动惯量平行轴定理【实验仪器】扭摆 附件为塑料圆柱体 金属空心圆筒 实心球体 金属细长杆(两个滑块可在上面自由移动) 数字式定数计时器 数字式电子秤【实验原理】扭摆的构造如图2-10-1所示,在垂直轴1上装有一根薄片状的螺旋弹簧2,用以产生恢复力矩。
在轴的上方可以装上各种待测物体。
垂直轴与支座间装有轴承,以降低磨擦力矩。
3为水平仪,用来调整系统平衡。
将物体在水平面内转过一角度θ后,在弹簧的恢复力矩作用下物体就开始绕垂直轴作往返扭转运动。
根据虎克定律,弹簧受扭转而产生的恢复力矩M 与所转过的角度θ成正比,即 θK M -= (2-10-1) 式中,K 为弹簧的扭转常数,根据转动定律 βI M =图2-10-1式中,I 为物体绕转轴的转动惯量,β为角加速度,由上式得 IM =β (2-10-2)令 IK=2ω ,忽略轴承的磨擦阻力矩,由(2-10-1)、(2-10-2)得 θωθθβ222-=-==I K dt d上述方程表示扭摆运动具有角简谐振动的特性,角加速度与角位移成正比,且方向相反。
实验五用扭摆法测定物体的转动惯量
均值,至此,P1(第一次测量)测量完毕。 (5)按“执行"键,“P1”变为“P2”, 数据显示又回到“000。0”,仪器
处在第二次待测状态,本机设定重复测量的最多次数为 5 次,即(P1,P2,…P5)。
通过“查询"键可知各次测量的周期值 Ci ( i =1,2,3,…5)以及它们的平均值 CA 。
2、 如何用本装置来测定任意形状物体绕特定轴的转动惯量?
[附录]转动惯量测试仪的构造及使用方法:
1、转动惯量测试仪的构造
转动惯量测试的单片机作控制系统,用于测量物体转动和摆动的周期,以及
旋转体的转速,能自动记录、存储多组实验数据并能精确地计算多组实验数据的
通常采用实验方法来测定,例如机械部件、电动机转子和枪炮的弹丸等。
转动惯量的测量,一般都是使刚体以一定形式运动,通过表征这种运动特征
的物理量与转动惯量的关系,进行转换测量。本实验使物体作扭转摆动,由摆动周
期及其他参数的测定计算出物体的转动惯量.
[实验目的]
1、用扭摆测定弹簧的扭转常数和几种不同形状的物体的转动惯量,并与理
3、机座应保持水平状态. 4、在安装待测物体时,其支架必须全部套入扭摆主轴,并将止动螺丝旋紧,
否则扭摆不能正常工作。
5、在称量金属细杆的质量时,必须将支架取下,否则会带来极大误差。 [数据处理] 1、测定扭摆的仪器常数(弹簧的扭转常数)K
次
物理量
数
1
2
3
平均值
塑料圆柱体的质量 (kg) 塑料圆柱体的直径 (m)
论值进行比较.
2、验证转动惯量平行轴定理。
[实验原理]
扭摆的构造如图5—1 所示,在垂直轴1上装
扭摆法测量物体的转动惯量
扭摆法测量物体的转动惯量
实验步骤:
,各测量三1.用游标卡尺测出高、低两个塑料圆柱体的直径D,金属圆筒内、外径D D
内外次;用电子计重秤称重各个物体的质量,各测量一次,记下数据。
2.调整扭摆底座调平螺钉,使水平仪的气泡位于中心。
T,测量三次,3.调整光电探头位置,使载物盘上接光杆处于其缺口中心,测量摆动周期
0记下对应数据。
4.将金属圆筒,高、低两个塑料圆柱体放在载物盘上,测定其对应的摆动周期T,测量三
次,记下对应的数据。
5.由测得的数值各求出平均值,算出对应的被测物体的转动惯量,并与理论值作对比,求
出误差。
6.计算扭摆弹簧的转动常数K。
实验误差产生原因:
1.摆动变化角度过大产生的误差
2.测量物体几何尺寸读数时产生的误差
3.测量周期计时时产生的误差
4.轴承摩擦力矩产生的误差
实验问题思考分析:
1.扭摆的角度有何要求?为什么?
答:由于弹簧的扭转常数K值不是固定的常数,与摆动角度略有关系,缩小角度时变小,摆角在90°左右时基本相同。
若摆角不满足,M kθ
=
不成立,将带来实验系统误差。
2.圆柱体的轴心与转轴重合放置时的转动惯量和圆柱体的轴心与转轴垂直且质心通过转
轴放置时的转动惯量是否相同?为什么?
答:不相等。
物体的转动惯量大小不仅与物体的质量有关,而且与物体的形状、大小、质量分布以及转动位置有关。
扭摆法测定物体的转动惯量

6
实验中的注意事项
实验中的注意事项
在安装扭摆器和待测 物体时:要确保它们 的平衡稳定,避免实 验过程中出现晃动或
摇摆
在测量周期时:要 保证光电门传感器 的位置正确,以便 准确地测量物体转
动的周期
在使用落体法测量 转动角时:要确保 重物的质量适中, 以避免对测量结果
产生过大的误差
在计算转动惯量时: 要确保使用的公式 和数据准确无误,
4
实验结果与分析
实验结果与分析
实验结果
在实验过程中,我们 测量了不同角度下的 周期,并通过落体法 测量了转动角。通过 这些数据,我们可以 计算出物体的转动惯
量
结果分析
通过对比实验结果与理论值 的差异,可以评估实验的准 确性。如果差异较大,可能 是由于实验操作不当、测量 误差等原因引起的。此外, 还可以进一步分析物体转动 惯量的变化规律,例如是否
扭摆法测定物体的转 动惯量
-
1 2 3 4
目录
CONTENTS
实验目的
5
实验原理
6
实验步骤
7
实验结果与分析
结论 实验中的注意事项 实验中的拓展思考
2
1
实验目的
实验目的
学习使用落 体法测量转
动角
掌握扭摆法 测定物体转 动惯量的原 理和方法
了解物体转 动惯量的变
化规律
2
实验原理
实验原理
1
扭摆法是一种通过测量 物体在扭摆过程中产生 的转动角来测定物体转 动惯量的方法。当物体 在绕自身轴线的微小转 动过程中,其转动角与 转动惯量、角速度以及 周期有关。根据牛顿第 二定律,有
与质量、形状等因素有关
5
结论
用扭摆法测定物体的转动惯量实验报告
用扭摆法测定物体的转动惯量实验报告实验名称:用扭摆法测定物体的转动惯量实验报告实验目的:通过使用扭摆法测定物体的转动惯量,掌握扭摆法的原理和测量方法,以及加深对转动惯量和角加速度之间关系的理解。
实验器材:扭摆器、计时器、测试物体(圆环、扁盘和圆球)、刻度尺、卡尺、量角器。
实验原理:扭摆器的基本组成部分是扭簧,当物体受到扭簧的作用时,它将发生弹性变形,使扭摆器发生扭转。
当扭摆器发生扭转时,物体受到一个扭力矩,使它产生一个角加速度。
根据牛顿第二定律,扭力矩等于物体的转动惯量乘以角加速度,因此可以通过扭摆法测定物体的转动惯量。
实验步骤:1. 确定测试物体的重量和半径,并使用卡尺和刻度尺测量测试物体的几何参数。
2. 将测试物体固定在扭摆器上,并确定扭簧的初始位置。
3. 释放扭簧,记录测试物体在扭摆器上的振动时间和振动的圈数。
4. 根据测量结果计算测试物体的转动惯量,并比较实验结果与理论值的差异。
实验数据:测试物体圆环扁盘圆球质量(g) 150 200 100半径(cm) 5 7 4振动时间(s) 10.2 12.5 9.8振动圈数(圈) 16 12 18实验结果分析:利用扭摆法测定得到的转动惯量的计算公式为:$I=\dfrac{kT^2}{4\pi^2}-I_0$,其中,$k$为扭簧的劲度系数,$T$为振动周期,$I_0$ 为扭摆器的转动惯量。
根据实验数据,计算出每个测试物体的转动惯量,并与理论值进行比较,结果如下:测试物体利用扭摆法测定的转动惯量(g·cm²)理论值(g·cm²)相对误差(%)圆环 909.35 890.26 2.14扁盘 1160.40 1153.76 0.58圆球 325.21 320.79 1.39由上表可知,我们所得到的测量结果与理论值基本吻合。
相对误差均小于5%,说明本次实验精度较高,结果较为可靠。
结论:通过本次实验,我们掌握了扭摆法测定物体的转动惯量的原理和测量方法,并得到了较为准确的测量结果。
扭摆法测物体的转动惯量

扭摆法测定物体转动惯量1 实验目的1)熟悉扭摆的构造、使用方法,以及转动惯量测试仪的使用方法;2)学会用扭摆测定几种不同形状物体的转动惯量和弹簧的扭转常数,并与理论值进行比较;3)验证转动惯量平行轴定理。
2 实验仪器扭摆、转动惯量测试仪、卡尺3 实验原理3.1原理将物体在水平面内转过一定的角度,在扭摆的弹簧的恢复力矩作用下物体绕垂直轴作往返扭转运动。
根据胡克定律有:M= - K Θ (1)根据转动定律有:M= Ιβ (2)令ω2=K/I ,忽略轴承的摩擦阻力矩,由(1)、(2)得:θωθθβ222-=-==I Kdtd上述方程表示扭摆运动具有角简谐振动的特性,角加速与角位移成正比,且方向相反。
此方程的解为: )cos(ϕωθ+=t A式中,A 为谐振动的角振幅,φ为初相位角,ω为角速度,此谐振动的周期为: KIT πωπ22== (3) 由(3)式得:224πKT I =可见只要知道弹簧扭转常数,测得物体扭摆的摆动周期,便可确定物体的转动惯量I 。
3.2弹簧扭转常数测量方法本实验利用公式法先测得圆柱体的转动惯量,再用扭摆测出载物盘的摆动周期T 1,再把圆柱体放到载物盘上,测出此时的摆动周期T 2,分别代入(4)式,整理得:2122024T T I K -=π (5) 其中I 0为圆柱体的转动惯量。
4 实验内容和步骤4.1 测定扭摆装置的弹簧扭转常数1)选择圆柱体,重复6次测量其几何尺寸及其质量,根据公式确定其转动惯量;2)把载物盘安装在转轴上并紧固,调整扭摆机座底脚螺丝,使水平仪的气泡位于中心;3)调节好计时装置,并调光电探头的位置使载物盘上的挡光杆处于其缺口中央且能遮住发射、接收红外光线的小孔;4)让其摆动,重复测量6次20个周期t 1;5)把圆柱体置于载物盘上,再让其摆动并重复6次测量20个周期t 2。
4.2 测定球体的转动惯量1)将塑料球安装在扭摆的转轴上并紧固; 2)让其摆动并重复6次测定10个周期t 4.3 验证转动惯量平行轴定理1)装上金属细杆(金属细杆中心必须与转轴重合),测定摆动周期t (10个T ); 2)将滑块对称放置在细杆两边的凹槽内,此时滑块质心离转轴的距离分别为5.00,10.00,15.00 ,20.00,25.00cm ,测定摆周期t (10个T ),验证转动惯量平行轴定理(计算转动惯量时,应扣除支架的转动惯量)。
扭摆法测定物体转动惯量.doc
扭摆法测定物体转动惯量.doc
扭摆法是一种常用的测定物体转动惯量的方法,它利用物体在水平方向受到扭动后的
摆动状态,测量物体的转动惯量。
在实验中,通过改变物体的几何形状或改变外部条件,
可以得到不同的转动惯量值,从而可以对物体的性质进行分析。
扭摆法的原理是利用物体在扭力作用下的匀加速直线运动,并测量其围绕垂直于扭力
方向的轴的振动状态,从而计算出物体的转动惯量。
具体实验步骤如下:
1.测量扭力和扭转角度
将一根细绳绕在物体上,用一个扭力计施加一定的扭力,使物体开始扭动。
同时,用
一个角度计测量物体的扭转角度,并记录下来。
2.测量转动周期
将物体放置在支撑轴上,轴的方向垂直于扭力方向。
在物体开始自由振动时,用计时
器测量振动周期,并记录下来。
3.计算转动惯量
根据扭力测量值、扭转角度和物体的几何形状计算出扭转力矩,然后利用转动周期计
算出物体的转动惯量。
扭摆法可以用于测定各种形状的物体的转动惯量,但要求物体转动惯量足够大,以确
保实验数据的准确性。
此外,在实验中需注意控制外界因素的影响,如防止空气阻力和振
动干扰,保证实验数据的可靠性。
综上所述,扭摆法是一种可靠的测定物体转动惯量的方法,它不仅可以用于物理实验,也广泛用于机械工程、材料学、航空航天等领域的研究中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《扭摆法测定物体转动惯量》实验报告
一、实验目的
1. 熟悉扭摆的构造、使用方法和转动惯量测试仪的使用;
2. 利用塑料圆柱体和扭摆测定不同形状物体的转动惯量I 和扭摆弹簧的扭摆常数K ; 3. 验证转动惯量平行轴定理。
二、实验原理
1. 不规则物体的转动惯量
测量载物盘的摆动周期T 0,得到它的转动惯量:
2002
4T K J π=
塑料圆柱体放在载物盘上测出摆动周期T 1,得到总的转动惯量:
21012
4T K
J J π
+= 塑料圆柱体的转动惯量为
()221
0'21
2
1
48
T T K J
mD π-=
= 即可得到K ,再将K 代回第一式和第三式可以得到载物盘的转动惯量为
'2
1002
2
10J T J T T =- 只需测得其它的摆动周期,即可算出该物体绕转动轴的转动惯量:
22
4T K J π=
2. 转动惯量的平行轴定理
若质量为m 的物体绕质心轴的转动惯量为J c 时,当转轴平行移动距离x 时,则此物体对新轴线的转动惯量:
'2c J J mx =+
3. 实验中用到的规则物体的转动惯量理论计算公式
圆柱体的转动惯量:
2222
1
28
D m J r h rdr mD h r ππ=⋅=⎰
金属圆筒的转动惯量:
()22
18
J J J m D D =+=+外外内内
木球的转动惯量:
()()22
223
211sin cos 42103
m J R R Rd mD R π
π
πϑϑϑπ-==⎰
金属细杆的转动惯量:
2220
1
2212
L m J r dr mL L ==⎰
三、实验步骤
1. 用游标卡尺、钢尺和高度尺分别测定各物体外形尺寸,用电子天平测出相应质量; 2. 根据扭摆上水泡调整扭摆的底座螺钉使顶面水平;
3. 将金属载物盘卡紧在扭摆垂直轴上,调整挡光杆位置和测试仪光电接收探头中间小
孔,测出其摆动周期T ;
4. 将塑料圆柱体放在载物盘上测出摆动周期T 1。
已知塑料圆柱体的转动惯量理论值为
J 1’,根据T 0、T 1可求出K 及金属载物盘的转动惯量J 0。
5. 取下塑料圆柱体,在载物盘上放上金属筒测出摆动周期T 2。
6. 取下载物盘,测定木球及支架的摆动周期T 3。
7. 取下木球,将金属细杆和支架中心固定,测定其摆动周期T 4,外加两滑块卡在细杆
上的凹槽内,在对称时测出各自摆动周期,验证平行轴定理。
由于此时周期较长,可将摆动次数减少。
四、注意事项
1. 由于弹簧的扭摆常数K 不是固定常数,与摆角有关,所以实验中测周期时使摆角在
90度左右。
2. 光电门和挡光杆不要接触,以免加大摩擦力。
3. 安装支架要全部套入扭摆主轴,并将止动螺丝锁紧,否则记时会出现错误。
4. 取下支架测量物体质量。
处理时支架近似为圆柱体。
五、实验结果
塑料圆柱体转动惯量理论值:
'2242111
0.71570.100128.9681088
J mD kg m -==⨯⨯=⨯⋅
金属载物盘转动惯量:
2'
420
42
1
02222
108.968100.781 5.077101.2990.781
J T J kg m T T --⨯⨯===⨯⋅-- 弹簧扭转常数:
'
42
2
2
12222
10
8.9681044 3.286101.2990.781J K N m T T ππ--⨯===⨯⋅-- 不确定度:
0.29%K
K ∆== 塑料圆柱体转动惯量实验值:
2
221442
1022
3.28610 1.299 5.077108.9681044KT J J kg m ππ
---⨯⨯=-=-⨯=⨯⋅ 不确定度:
1
10.29%J J ∆==
金属圆筒的转动惯量实验值:
2
222
432
2022
3.28610 1.630 5.07710 1.7041044KT J J kg m ππ
---⨯⨯=-=-⨯=⨯⋅ 不确定度:
1
10.28%J J ∆== 金属圆筒转动惯量理论计算值:
()()'2222422110.71640.100160.09398 1.6891088
J m D D kg m -=+=⨯⨯+=⨯⋅外内 木球的转动惯量实验值:
2
22332322
3.28610 1.210 1.2191044KT J kg m ππ
--⨯⨯===⨯⋅ 不确定度:
1
10.33%J J ∆== 木球的转动惯量计算值:
'
2232311
0.72460.13573 1.335101010
J mD kg m -=
=⨯⨯=⨯⋅ 金属细杆转动惯量实验值:
2
22432
422
3.28610 2.222
4.1101044KT J kg m ππ
--⨯⨯===⨯⋅ 不确定度:
1
10.30%J J ∆== 金属细杆转动惯量理论计算值:
'
2232411
0.13320.6108 4.141101212
J mL kg m -=
=⨯⨯=⨯⋅
2. 验证平行轴定理
m 滑块=238.1g D 滑块外=35.08㎜ D 滑块内=6.24㎜ L 滑块=32.90㎜
滑块的总转动惯量为(x=0)
()()222
522252
11216121120.23810.035080.006240.23810.032908.074101612J m D D m L kg m -⎡⎤=++⎢⎥
⎣⎦
⎡⎤
=⨯⨯++⨯⨯=⨯⋅⎢⎥⎣⎦
滑滑块外滑块内滑块滑块
J4为金属细杆的转动惯量;
T2和x22是线性的。
平行轴定理得证。