非线性系统理论
非线性控制系统理论与应用

非线性控制系统理论与应用第一章线性控制系统概述线性控制系统是一类基于线性系统理论的控制系统。
线性系统是指系统的输入与输出成比例的关系,即如果输入信号增加一倍,输出信号也会增加一倍。
线性系统具有稳定性和可控性的优点,因此在控制系统设计中有广泛的应用。
线性控制系统分为时不变系统和时变系统两种。
在时不变系统中,系统参数固定不变。
在这种情况下,可以针对系统的等效传递函数或状态方程进行设计和分析。
时变系统中,系统参数随时间变化。
需要对系统进行时变分析,以便针对不同时间点设计控制器。
第二章非线性控制系统概述非线性系统是指系统的输入与输出不成比例的关系。
非线性系统不同于线性系统的特点是可能出现复杂的动态行为和稳定性问题。
因此,非线性系统的控制设计比线性系统更加复杂,需要更高级的系统理论和控制方法。
非线性控制系统包括分段线性系统、滞后系统、时变系统和混沌系统等。
非线性控制系统设计需要掌握许多高级数学工具,如微积分、变分法、拓扑学、非线性动力学和控制理论等。
第三章非线性控制系统的分析由于非线性系统比线性系统更为复杂,因此非线性控制系统的分析也更加困难。
但是,通过一些数学工具和技术,可以对非线性系统进行分析和解决。
非线性系统最重要的特征之一是稳定性。
非线性系统有时会出现不稳定的情况。
在设计非线性控制系统时,需要对系统的稳定性进行分析,以便在设计和实现控制器时考虑哪些因素会对稳定性产生影响。
另外一个重要的因素是动态行为。
非线性系统可能显示出复杂的动态行为,如周期性行为或混沌行为。
在非线性控制系统设计中,控制器必须能够应对这些复杂的动态行为。
第四章非线性控制系统的设计在非线性控制系统设计中,需要考虑许多因素。
首先,需要选择适当的控制策略,如状态反馈、输出反馈、模糊控制或神经网络控制。
其次,需要选择适当的控制器类型,如比例控制器、PID控制器或先进控制器。
最后,在设计非线性控制系统时,需要注意以下几个方面:1、控制器必须能够适应系统的非线性特性。
自动控制原理第七章非线性控制系统的分析
这里,M=3,h=1
负倒描述函数为
N 1 X
X
12 1 1 2
X
X 1
X 1, N 1 X , N 1
必有极值
d N 1X 令
0 dX
得 X 2
N 1 2
2
0.523
12
1
1 2
2
6
X: 1 2
-N-1(X): 0.523
2.自振的稳定性分析
在A点,振幅XA,频率A。
扰动:
X : A点 C点 C点被G(j)轨迹包围,不稳定,
振幅 ,工作点由C点向B点运动;
A点一个不稳 定的极限环。
X : A点 D点 D点不被G(j)轨迹包围,稳定,
振幅 ,工作点由D点左移。
在B点,振幅XB,频率B 。 扰动:
X : B点 E点 E点不被G(j) 轨迹包围,稳定,
振幅 ,工作点由E点到B点;
X : B点 F点 F点被G(j)轨迹包围,不稳定,
振幅 ,工作点由F回到B点。
B点呈现稳定的自激振荡:振幅XB ,频率B。
3.闭环系统稳定性判别步骤
1)绘制非线性部分的负倒描述函数曲线和线 性部分的频率特性曲线。
2)若G(j)曲线不包围“-N-1(X)”曲线,则系统稳定。 若G(j)曲线包围“-N-1(X) ”曲线,系统不稳定。 若G(j)曲线与“-N-1(X)”曲线相交,系统出现自振。
3)若G(j )曲线与“-N-1(X)”曲线有交点,做以 下性能分析:
(1)不稳定的极限环
(2)稳定的极限环 计算自振频率和幅值。
例1:非线性系统如图所示,其中非线性特性为 具有死区的继电器,分析系统的稳定性。
0e
非线性系统理论

强非线性
非线性系统的线性化描述
对非线性系统的局部线性化处理:
最简单的一维非线性系统,动力学方程的一般形式为:
x f (x)
“非线性是对线性的偏离”
按泰勒公式展开的无穷级数:
f ( x ) f ( x 0 ) f ( x 0 )( x x 0 ) ( x )
“略去非线性余项” 近似表示为以下线性系统:
极限环
稳定:自持振荡
非线性系统
自激振荡
丌稳定:非自持振荡
系统在没有周期性外作用 力驱动下由于本身的非线性 判断一个非线性系统有无极限环
效应而自収出现周期运动。
非线性系统的自激振荡
极限环
孤立的闭合轨道 周围无闭合轨道,只有螺旋型轨道 对周围的轨道 要么吸引,要么排斥 一类定态 代表系统的一类典型的运动体制
非线性 余项
f ( x ) f ( x 0 ) f ( x 0 )( x x 0 ) ax b
非线性系统的线性化描述
局部线性化加微扰方法:
线性化 近似处理
分段线性化方法: 用一系列首尾相接的折线段 近似代表曲线。
对结论 加以修正
高次项为 扰动因素
如:沿曲折的海岸线修路
中心点
非闭合轨道 周围有无穷多条闭合轨道 对附近的闭合轨道 既丌互相吸引,也丌相互排斥 附近的闭合轨道是系统的扰动态 丌代表系统的一种典型运动体制
非线性系统的非平庸行为
多吸引子 并存
自激振荡
混沌运动
……
——非线性系统的各种非平庸行为
以上都是非线性相互作用产生的系统
现象,反映的是系统的整体涌现性。
非线性系统的双稳态
启示
1、现实世界本质上是非线性的
非线性系统理论.ppt

若当振幅X增大时, -1/N(X)曲线由G(jω )包围的区域(不 稳定区)穿出,该交点处存在着稳定的周期运动,该交点是自 振点。
例6-3 判定图6-14所示特性的自振点。
解 图a为一高阶线性函数与无回差理想继电特性的串联,M1、M3 点为自振点,M2为不能持续工作的振荡点。
0
0
Y A B n
2 n
2 n
n arctg
An Bn
由于典型非线性特性均属奇对称函数;A0=0,又谐波线性化后略 去高次谐波,只取基波,故有
y ( t ) A cos t B sin t Y sin( t ) 1 1 1 1
B1 1 arcg A1
2
这是一种非线性超前校正线路,有利用改善系统性能。
a ) 原来线路
b )线路的描述函数曲线
本章主要知识点与主要线索
结构归化 非线性系统 典型结构 计算 查表
N(X )
乃氏曲线 线性部分
1 N(X )
稳定性 , 自 振 , 求自 振 参数
分段线性的 开关线 分段相迹方程 非线性系统 奇点类型
积分 求解
第15次课
教学学时:2学时 目的要求:通过本次课程了解非线性系统的概念和改善非线性 系统性能的措施及非线性特性的利用,掌握描述函数法的计算 和应用 知识要点: 1.非线性系统概述 a.常见非线性特征 b.非线性系统的特点 2.函数描述法 a.描述函数的概念和计算 b.改善非线性系统性能的措施及非线性特性的利用 教学步骤:先介绍非线性系统的概述,在围绕概述讲述描述函数 法的计算和应用并举例说明
6.2 描 述 函 数 法
非线性系统控制理论及其在飞行器系统中的应用研究

非线性系统控制理论及其在飞行器系统中的应用研究随着科技的不断进步,控制理论在各个领域得到了广泛的应用。
非线性系统控制理论是其中的一种重要的技术手段。
在飞行器系统中,非线性系统控制理论的应用越来越普遍。
本文将从非线性系统控制理论的基本概念、特点出发,深入探讨其在飞行器系统中的应用。
一、非线性系统控制理论的概念及特点非线性系统控制理论是一种控制系统设计和分析的方法,它在控制对象非线性的情况下,基于系统建模、数学分析和控制策略设计的技术,以实现对系统稳定性、动态响应和性能的控制。
与线性系统不同,非线性系统的行为比较复杂,其状态变量的变化不能用简单的线性关系来描述。
在非线性系统中,系统的输出与输入不是简单的比例关系,而是存在一定的非线性关系。
非线性系统的特点主要包括:非线性、多变量、耦合、时变、不确定性等。
因此,非线性系统控制不仅需要考虑动态响应,还需要考虑系统的稳定性和鲁棒性。
二、非线性系统控制在飞行器系统中的应用在飞行器系统中,非线性系统控制理论得到了广泛的应用。
控制系统设计的目标是实现飞行器的稳定飞行和精确定位。
同样,非线性系统控制也是在飞行器的非线性特性下实现高性能控制的必要手段。
1. 非线性控制在飞行器系统中的应用在飞行器的控制系统中,通常需要考虑多个非线性因素的影响,如气动力、惯性力和重力等因素。
这种多因素、复杂动力学的问题很难用传统的线性控制器来解决,而非线性控制器可以更好地适应飞行器的控制要求。
例如,在飞行器的自主导航中,非线性控制算法可以更准确地确定飞行器的位置和姿态,实现更高效的飞行控制。
2. 非线性控制在飞行器姿态稳定中的应用飞行器的姿态控制是对飞行器进行姿态调整的一个重要环节。
这需要对飞行器进行稳定控制,以保证其在复杂环境下的稳定飞行。
针对飞行器的姿态稳定问题,非线性控制算法可以更好地处理复杂的非线性因素,实现更精确的姿态调整。
3. 非线性控制在飞行器飞行性能优化中的应用为了提高飞行器的性能和效率,需要通过优化控制算法来实现。
自动控制理论——非线性系统的分析
Aa A a
3 滞环特性
K ( A sin t a ) x2 (t ) K ( A a ) K ( A sin t a )
x2 x2
3 2 2
a
0
a
x1
0
2
2
t
滞环非线性环节的 描述函数为
N ( A) C1 j1 1 e A12 B12 e j1 A A
一 非线性系统稳定性分析
• 描述函数是在正弦输入信号作用下,输出 的基波分量与输入正弦信号之间的关系。
• 描述函数只能用于对非线性系统的稳定性 和自持振荡的近似分析。
含有非线性环节的系统结构图
r
G1 j
x1
N A
x2
x 2
G2 j
y
H j
• 非线性部分用描述函数 N ( A) 表示; • 非线性部分用描述函数 G ( j ) 表示; G( j) G1 ( j)G2 ( j)H ( j) • 自持振荡只与非线性系统的结构和参 数有关,分析自持振荡时,设 r 0 。
x1
t
a)
单值继电特性在正弦输入作用下的输出波形
(2).非单值继电特性
x2
x2m x2m
x2
非继电特性的 描述函数为
a
x2m
0
aቤተ መጻሕፍቲ ባይዱ
x1
0
x2m
t
4 x2m j N ( A) e A
b)
A
A
0
A
x1
t
a)
非单值继电特性在正弦输入作用下的输出波形
7-5 用描述函数研究非线性系统
非线性系统控制理论与应用研究
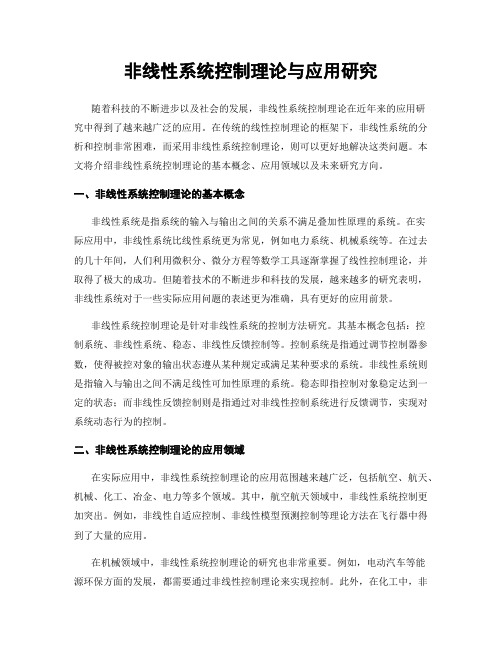
非线性系统控制理论与应用研究随着科技的不断进步以及社会的发展,非线性系统控制理论在近年来的应用研究中得到了越来越广泛的应用。
在传统的线性控制理论的框架下,非线性系统的分析和控制非常困难,而采用非线性系统控制理论,则可以更好地解决这类问题。
本文将介绍非线性系统控制理论的基本概念、应用领域以及未来研究方向。
一、非线性系统控制理论的基本概念非线性系统是指系统的输入与输出之间的关系不满足叠加性原理的系统。
在实际应用中,非线性系统比线性系统更为常见,例如电力系统、机械系统等。
在过去的几十年间,人们利用微积分、微分方程等数学工具逐渐掌握了线性控制理论,并取得了极大的成功。
但随着技术的不断进步和科技的发展,越来越多的研究表明,非线性系统对于一些实际应用问题的表述更为准确,具有更好的应用前景。
非线性系统控制理论是针对非线性系统的控制方法研究。
其基本概念包括:控制系统、非线性系统、稳态、非线性反馈控制等。
控制系统是指通过调节控制器参数,使得被控对象的输出状态遵从某种规定或满足某种要求的系统。
非线性系统则是指输入与输出之间不满足线性可加性原理的系统。
稳态即指控制对象稳定达到一定的状态;而非线性反馈控制则是指通过对非线性控制系统进行反馈调节,实现对系统动态行为的控制。
二、非线性系统控制理论的应用领域在实际应用中,非线性系统控制理论的应用范围越来越广泛,包括航空、航天、机械、化工、冶金、电力等多个领域。
其中,航空航天领域中,非线性系统控制更加突出。
例如,非线性自适应控制、非线性模型预测控制等理论方法在飞行器中得到了大量的应用。
在机械领域中,非线性系统控制理论的研究也非常重要。
例如,电动汽车等能源环保方面的发展,都需要通过非线性控制理论来实现控制。
此外,在化工中,非线性系统控制理论主要应用于高分子聚合反应控制、反应动力学等方面。
在冶金和电力工业中,非线性控制理论则主要应用于超高温熔炼等领域。
三、未来研究方向随着科技的不断发展,非线性系统控制理论的研究也在逐渐深入。
非线性系统动力学的理论与应用

非线性系统动力学的理论与应用一、引言非线性系统广泛存在于自然界、社会生活以及科技领域。
其动力学特征复杂,因此非线性系统动力学理论的研究具有重要的意义。
本文将从理论和应用两个方面对非线性系统动力学进行阐述和探究。
二、非线性系统动力学基础理论1.基本概念非线性系统指的是与线性系统相对应的系统,其特点是当输入信号增大到一定程度时,输出信号与输入信号之间的关系不再呈线性关系。
非线性系统由于其本身的非线性特性,具有一般系统所不具备的一些特殊性质。
其中比较重要的几个方面包括稳定性、混沌现象和自相似性等。
2.非线性系统的常用数学方法研究非线性系统动力学问题主要采用的数学方法有:微分方程、差分方程、随机微分方程、控制理论、拓扑理论等。
其中微分方程方法是最为经典和常用的方法之一。
三、非线性系统动力学应用举例1.生物学应用在生物学领域中,非线性系统动力学被广泛应用于生命科学中诸如神经生物学、癌症研究与发展、生态学及进化生物学等多个领域。
研究非线性系统可以帮助我们更好地了解生命本身。
2.化学及化工应用在化学及化工领域中,非线性系统的应用已经开始崭露头角。
如对复杂的化学反应及过程进行数学建模,探究其动力学规律,分析反应中可能产生的稳定性、震荡与混沌现象,以快速解决复杂问题。
3.机械工程应用机械工程中,非线性系统动力学广泛应用于振动控制、结构优化、控制系统设计、牢固性设计等方面。
非线性系统动力学分析可以帮助工程师更好地理解和控制机械系统的动力学行为,从而做出更准确的决策和更好的机器设计。
四、展望非线性系统动力学的研究具有重要意义和广阔前景。
未来,我们可以继续寻找新的非线性现象,完善非线性系统动力学理论的各种方法,拓宽应用领域并形成新的研究方向。
同时,非线性系统动力学的分析也需要与多个领域的交叉,随着计算机、数值模拟技术的发展,非线性系统动力学的研究空间将更加广阔。
五、结论综上所述,非线性系统动力学理论研究具有重要的理论和应用价值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Introduction of Lyapunov-Based Control1An Example of Nonlinear SystemsLinear System ˙x=Ax+Buy=Cx(1) it has the superposition property.Besides,the stability of the linear system completely depends on its parameters.Nonlinear System ˙x=f(x,u)y=g(x)(2)superposition does not hold for nonlinear systems,and the stability of a nonlinear system depends on both system parameters and initial conditions.Example:The dynamic model for a2-DOF overhead crane system(see Figure??)can be presented as followsM(q)¨q+V m(q,˙q)˙q+G(q)=u(3)q=[x(t)θ(t)]T(4) where x(t)∈R1denotes the gantry position,θ(t)∈R1denotes the payload angle with respect to the vertical,and M(q)∈R2×2,V m(q,˙q)∈R2×2,G(q)∈R2,and u(t)∈R2are defined as followsM(q)= m c+m p−m p L cosθ−m p L cosθm p L2 ,V m(q,˙q)= 0m p L sinθ˙θ00 ,G(q)= 0m p gL sinθ T,u(t)= F0 T,(5)where m c,m p∈R1represent the gantry mass and the payload mass,respectively,L∈R1represents the length of the rod to the payload,g∈R1represents the gravity coefficient,and F(t)∈R1 represents the control force input acting on the gantry(see Figure??).2Common Nonlinear Systems Behaviors2.1Multiple Equilibrium PointsFor the system˙x=f(x)(6)1Figure1:To obtain equilibrium points,solve the following equationf(x s)=0if it has multiple solutions,then the system has multiple equilibrium points.Example:˙x=−x+x2(7)−x+x2=0=⇒x s=1or x s=0has too equilibrium points:x s=1and x s=0.Question:Which one is stable?Why?Rewrite the equation as follows˙x=x(x−1)then if x>1,˙x>0,x increases with time.For the case of x<1,(x−1)<0,thus˙x<0,for1>x>0˙x>0,for x<0therefore,x s=1is unstable and x s=0is stable.We can solve the system equation to obtain the response as followsx(t)=x0e−t1−x0+x0e−t=1−1−x01−x0+x0e−tFrom this formula,it can be seen that if x0<1,the denominator1−x0+x0e−t>0,thuslimt→∞x(t)=0.The response of x0=0.99and x0=1.0001is demonstrated in Figure??.2Figure2:2.2Limit CycleLimit Cycle:Oscillation offixed amplitude andfixed frequency without external excitation.Example:¨x+(x2−1)˙x+x=0if|x|>1,x2−1>0,the damper consumes energy.If|x|<1,x2−1<0,the damper produces energy.Therefore,the system has a tendency to make x oscillate around some region.Response ofx0=5,˙x0=5andx0=−1,˙x0=−3is shown in Figure32.3ChaosThe system output is extremely sensitive to initial conditions.Example:¨x+0.1˙x+x5=6sin(t)Figure4shows the response of the system to two almost identical initial conditionsx0=2,˙x0=3andx0=2.01,˙x0=3.01.Due to the high nonlinearity in x5,the response become apparently different after a certain time.3Figure3:42.4Other BehaviorsSaturation,dead zone,hysteresis,and so on.3Why Nonlinear ControlAll physical systems are nonlinear in nature.Linear model is only an approximation.Conven-tionally,the nonlinear system is linearized around its operating point and a linear controller is then designed for the obtained simplified model.In some cases,this cannot achieve satisfactory performance.1.To improve system performance;2.Linerization cannot provide correct solutionExample:for the same system˙x=−x+x2Linearizing it yields˙x=−xit has only1stable equilibrium point at x s=0??3.To deal with model uncertainties:Example:˙x=f(x,u)+g(x,u)where f(x,u)denotes the modeled dynamics,while g(x,u)represents unmodeled uncertainties including noise,disturbance,etc.4General Nonlinear Control4.1Phase Plane Analysis:A graphical method mainly for2nd-order systems.4.2Describing System AnalysisAn extended version of the frequency response method,it can be used to approximately analyze and predict nonlinear behavior.Main Use:Prediction of limit cycles in nonlinear systems,unfortunately only an approximate way.4.3Lyanpunov MethodIt isfirst introduced to judge the stability of a nonlinear system.Stable:state not blow up,how to judge?Linear System:Route Criteria,Nyquist CriteriaExample for Stability Analysis:˙x=12sin(x)−xIs this system stable?5ChooseV=1 2 x2then V∈L∞(V remains bounded)implies x∈L∞.Taking the time derivative of V yields˙V=x˙x=x 12sin(x)−x≤−x2+12|x sin(x)|≤−x2+12x2≤−12x2therefore,˙V≤−VandV(t)≤V0e−tx(t)≤x0e−12tQuestion:If V cannot be solved out,how to judge the stability from the differential equation or inequalities?Lyapunov Theorem,Babalat’s Lemma,and so on.Besides stability analysis,the Lyapunov method is also a powerful tool to design nonlinear controllers.Example:Suppose we have the following system˙x=f(x)+g(x)uwhere f(x),g(x)are known functions and u is the control input.Besides,g(x)N g0with g0being positive constant.How to design a controller to regulate x?ChooseV=1 2 x2then we take its time derivative and substitute into the system dynamics to obtain˙V=x˙x=x(f(x)+g(x)u)Can we choose a suitable controller u to make˙V≤0or further,˙V≤−x2?Makeu=−f(x)g(x)−xg(x)with k representing a positive control gain.Then˙V=−x2Similarly as the example above,x goes to zero exponentially fast.Question1.Why do we need the assumption of g(x)N g0?To make the controller free of singularity,or make the system controllable.Question2.There are two terms within the controller u,which one is feedback,which one is feedforwad?What are they for?6Advantage:Implement the controller design and stability analysis simultaneously;Backbone of the existing nonlinear controllers;Heart and soul of model control.Disadvantage:hard to construct a suitable Lyapunov function for a give complex dynamic system,conservative method:the conclusion you made for a system based on the Lyapunov analysis can be weaker than its actual situation.We will show this in the future class.5Differences between Linear Control and Lyapunov Con-trola)Model-Free Control vs Model-Based Controlb)Feedback Control vs Feedforward Control6HomeworkUse Matlab/Simulink to simulate the following system¨x+0.1˙x+x5=6sin(t)for two set of initial conditionsx0=2,˙x0=3andx0=2.01,˙x0=3.017。