2016年浙江工业大学922自动控制理论(II)考研真题研究生入学考试试卷
2002研究生入学考试试题(自动控制原理)

哈尔滨工程大学2002年研究生入学考试试题(自动控制原理)一 (15')已知控制系统方框图如下:(1)计算系统的闭环传递函数C(s)/R(s);(2)判别系统的稳定性,若不稳定,请给出该系统在[s]平面右半部分的极点个数。
二(15')设控制系统方框图如下:(1)主反馈开路时,G(s)=G 1(s)G 2(s)的单位阶跃响应为0.5-e -t +0.5e -2t ,计算G 1(s)。
(2)G 1(s)=1/(s+3),且r(t)=10*1(t)时,计算①系统的稳态输出;②系统的峰值时间t p ,超调量σp 及稳态误差e ss 。
三(15') 已知单位负反馈系统的开环传递函数为G(s)=k (0.2s +1)(0.5s +1)(2s -1)(1)绘制k 从0→+∞时的闭环系统根轨迹图;(2)确定保证系统稳定,且阶跃响应无超调的k 值的范围;(3) 求出在单位阶跃输入作用下,稳态误差可能达到的最小绝对值e ssmin四(15')已知负反馈系统的开环传递函数为: G(s)H(s)=k (T 1+1)s 2(T 2+1) (T 1>T 2>0)求使系统相角裕度达最大值时的k 值,并给出剪切频率ωc 值和相角裕度γ值。
注意:第5题与第6题任选一题即可。
五(15') 非线性系统的结构如图所示,其中,h=2,M=π。
确定使闭环系统稳定的参数k 的取值范围。
提示:参考通用的继电非线性特性描述函数 .N(X)=2M πX {1-(mh X )2+1-(h X )2}+j 2Mh πX 2 (m-1),得出本系统的N(X).六(15')设线性离散控制系统如图所示,试确定数字控制器D(z),使得闭环系统响应r(t)=R*t 输入时,过渡过程时间最短。
给出作无纹波无稳态误差最少拍设计后,过渡过程时间值。
采样周期T0=0.69秒 。
R(s) C(s) s2 + _ + _ _ + s+1 1s 1s 2+2s 1s 2+s × × × × × G1(s) 1s13 R(s) C(s) + _ + _七(10')二维线性定常系统的状态方程如下式所示:x =Ax x(0)=x 0 t ≥ 0 若x 0=[1 -1]T 时,则x(t)=[e -t -e -t ]T t ≥0 若x 0=[1 -2]T 时,则x(t)=[e -2t -2e -2t ]T t ≥0 试求系统的状态转移矩阵Φ(t)和系统矩阵A 。
2017年浙工大浙江工业大学考研真题、研究生招生简章、招生目录及考试大纲汇总
浙江工业大学考研真题、考研答案及考研资料,由布丁考研网浙工大在读学长收集整理,真题都是来自官方原版,权威可靠,内部资料都是我们当年考浙工大时用的,考上后针对新的大纲重新进行了整理,参考价值极高。
此外,我们还有很多备考浙工大的经验,学弟学妹们有任何报考的疑问均可以咨询我们。
我们还提供一对一VIP辅导,除了传授报考浙江工业大学的内部信息、备考方法及经验外,把专业课的所有重点、难点、考点全部道出,在最短的时间内快速提升成绩,特别适合二战、在职、本科不是985和211、基础比较差的同学。
2017浙江工业大学硕士研究生招生专业目录(学术型)
浙江工业大学考研真题,由布丁考研网在读学长提供。
因为专注,所以专业。
布丁考研网,在读学长提供考研专业课资料及辅导,真实可靠,保证高参考价值。
浙江工业大学2016年

硕士研究生入学考试自命题科目考试大纲
科目代码、名称:
957自动控制原理(II)
专业类别:
□学术型√专业学位
适用专业:
085211计算机技术
一、基本内容
1自动控制的基本概念
自动控制系统;自动控制系统的类型;对控制系统性能的基本要求
2连续系统的数学模型
系统数学模型的概念;微分方程描述;传递函数;结构图
二、考试要求(包括考试时间、总分、考试方式、题型、分数比例等)
考试时间:180分钟
总分:150分
考试方式:闭卷
题型、分数比例:简述题(约20%)、计算题(约80%)
三、主要参考书目
《自动控制原理》(第二版)王万良编著,高等教育出版社2014
3时域分析法
稳定性分析;暂态性能分析;稳态性能分析
4频率法
频率特性;典型环节频率特性的伯德图;控制系统开环频定判据;控制系统相对稳定性分析
5离散系统控制理论
信号的采样与保持;差分方程;Z变换;Z传递函数;线性离散系统的稳定性分析;线性离散系统的暂态性能分析;线性离散系统的稳态误差分析
自控原理试卷及答案浙江工业大学6
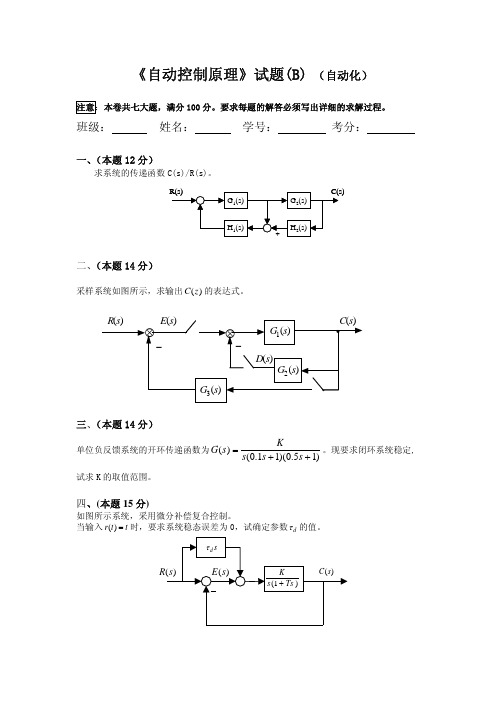
《自动控制原理》试题(B) (自动化)
注意:本卷共七大题,满分100分。
要求每题的解答必须写出详细的求解过程。
班级: 姓名: 学号: 考分:
一、(本题12分)
求系统的传递函数C(s)/R(s)。
二、(本题14分)
采样系统如图所示,求输出)(z C 的表达式。
三、(本题14
分)
单位负反馈系统的开环传递函数为)
15.0)(11.0()(++=s s s K
s G 。
现要求闭环系统稳定,
试求K 的取值范围。
四、(本题15分)
如图所示系统,采用微分补偿复合控制。
当输入t t r =)(时,要求系统稳态误差为0,试确定参数d τ的值。
R
五、(本题15分)
设单位负反馈系统的开环传递函数为:)
6(25
)(+=
s s s G
试求该系统的上升时间,超调量,自然振荡频率,阻尼比,以及%5%=δ时的调整时间。
六、(本题15分)
某最小相位系统的开环对数幅频特性的渐近线如图所示 。
试确定该系统的开环传递函数以及频率特性。
七、(本题15分)
系统的方框图如图所示,设采样周期T=1s, a=1, k=10, 试分析系统的稳定性。
自动控制原理试卷含答案4套完整(免费)
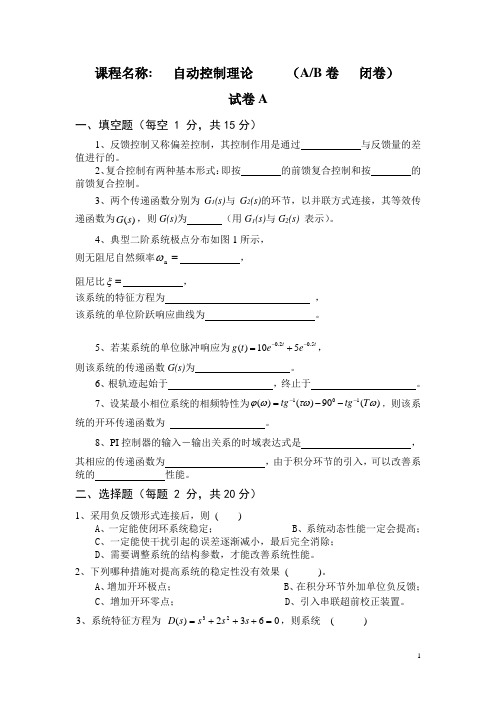
课程名称: 自动控制理论 (A/B 卷 闭卷)试卷A一、填空题(每空 1 分,共15分)1、反馈控制又称偏差控制,其控制作用是通过 与反馈量的差值进行的。
2、复合控制有两种基本形式:即按 的前馈复合控制和按 的前馈复合控制。
3、两个传递函数分别为G 1(s)与G 2(s)的环节,以并联方式连接,其等效传递函数为()G s ,则G(s)为 (用G 1(s)与G 2(s) 表示)。
4、典型二阶系统极点分布如图1所示,则无阻尼自然频率=n ω ,阻尼比=ξ ,该系统的特征方程为 ,该系统的单位阶跃响应曲线为 。
5、若某系统的单位脉冲响应为0.20.5()105t t g t e e --=+,则该系统的传递函数G(s)为 。
6、根轨迹起始于 ,终止于 。
7、设某最小相位系统的相频特性为101()()90()tg tg T ϕωτωω--=--,则该系统的开环传递函数为 。
8、PI 控制器的输入-输出关系的时域表达式是 , 其相应的传递函数为 ,由于积分环节的引入,可以改善系统的 性能。
二、选择题(每题 2 分,共20分)1、采用负反馈形式连接后,则 ( )A 、一定能使闭环系统稳定;B 、系统动态性能一定会提高;C 、一定能使干扰引起的误差逐渐减小,最后完全消除;D 、需要调整系统的结构参数,才能改善系统性能。
2、下列哪种措施对提高系统的稳定性没有效果 ( )。
A 、增加开环极点;B 、在积分环节外加单位负反馈;C 、增加开环零点;D 、引入串联超前校正装置。
3、系统特征方程为 0632)(23=+++=s s s s D ,则系统 ( )A 、稳定;B 、单位阶跃响应曲线为单调指数上升;C 、临界稳定;D 、右半平面闭环极点数2=Z 。
4、系统在2)(t t r =作用下的稳态误差∞=ss e ,说明 ( )A 、 型别2<v ;B 、系统不稳定;C 、 输入幅值过大;D 、闭环传递函数中有一个积分环节。
自动控制原理试题及答案[2]
![自动控制原理试题及答案[2]](https://img.taocdn.com/s3/m/44e4f6c2192e45361166f5a1.png)
自动控制原理试题及答案(word版可编辑修改)编辑整理:尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望(自动控制原理试题及答案(word 版可编辑修改))的内容能够给您的工作和学习带来便利。
同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为自动控制原理试题及答案(word版可编辑修改)的全部内容。
自动控制原理:参考答案及评分标准一、 单项选择题(每小题1分,共20分)1。
系统和输入已知,求输出并对动态特性进行研究,称为( C )A.系统综合B.系统辨识C.系统分析D.系统设计2. 惯性环节和积分环节的频率特性在( A )上相等。
A 。
幅频特性的斜率 B.最小幅值 C.相位变化率 D.穿越频率3. 通过测量输出量,产生一个与输出信号存在确定函数比例关系值的元件称为( C )A.比较元件B.给定元件 C 。
反馈元件 D 。
放大元件4. ω从0变化到+∞时,延迟环节频率特性极坐标图为( A )A.圆 B 。
半圆 C 。
椭圆 D.双曲线5. 当忽略电动机的电枢电感后,以电动机的转速为输出变量,电枢电压为输入变量时,电动机可看作一个( B )A 。
比例环节 B.微分环节 C.积分环节 D 。
惯性环节6. 若系统的开环传 递函数为2)(5 10+s s ,则它的开环增益为( C ) A.1 B 。
2 C.5 D 。
107. 二阶系统的传递函数52 5)(2++=s s s G ,则该系统是( B ) A 。
临界阻尼系统 B.欠阻尼系统 C 。
过阻尼系统 D 。
零阻尼系统8。
若保持二阶系统的ζ不变,提高ωn ,则可以( B )A.提高上升时间和峰值时间B.减少上升时间和峰值时间C 。
提高上升时间和调整时间 D.减少上升时间和超调量9。
中国计量大学2016年硕士研究生入学考试试题考试科目:821自动控制原理II
本试卷共8大题,共3页。
图1是液面自动控制系统的两种原理示意图。
在运行中,希望液面高度0H 维持不变。
(1)试说明各系统的工作原理。
(2)画出各系统的方框图,并说明被控对象、给定值、被控量和干扰信号是什么?二、(15分)试用梅逊公式列写图2所示系统的传递函数)(/)(s R s C 。
单位反馈开环传递函数为)10)(2()(10)(+++=s s s a s s G ,(1)试确定使系统稳定的a 值;(2)使系统特征值均落在S 平面中1Re -=这条线左边的a 值。
四、(20分)设单位负反馈系统开环传递函数为1)(+=Ts K K s G g p 。
如果要求系统的位置稳态误差0e ss =,单位阶跃响应的超调量%3.4=Mp ,试问p K 、g K 、T 各参数之间应保持什么关系?五、(20分)单位反馈系统的开环传递函数为:)1)(2()52()(2-++-=s s s s K s G (1)绘制系统的根轨迹(2)确定使系统闭环传递函数具有阻尼比0.5的K 值六、(20分)一控制系统如图3所示。
当t t r =)(,要求系统的稳态误差小于0.2,且增益裕量不小于6dB。
试求增益K 的取值范围。
七、(20分)已知最小相位系统的开环对数幅频特性)(0ωL 和串联校正装置的对数幅频特性)(ωc L 如图4所示,原系统的幅值穿越频率为s rad c /3.24=ω;(1)写出原系统的开环传递函数)(0s G ;(2)写出校正装置的传递函数)(s G c ;(3)写出校正后的开环传递函数)()(0s G s G c ,画出校正后系统的开环对数幅频特性)(ωGC L 。
图4八、(20分)求图5所示系统的闭环脉冲传递函数。
图50.010.11101000.322024.340-20dB/dec-20dB/dec -40dB/dec -60dB/dec L(ω)ωL 0L c。
自动控制原理考试试卷及答案30套分析
自动控制原理试卷A(1)2. (10分)已知某系统初始条件为零,其单位阶跃响应为)0(8.08.11)(94≥+-=--t e e t h t t ,试求系统的传递函数及单位脉冲响应。
3.(12分)当ω从0到+∞变化时的系统开环频率特性()()ωωj j H G 如题4图所示。
K 表示开环增益。
P 表示开环系统极点在右半平面上的数目。
v 表示系统含有的积分环节的个数。
试确定闭环系统稳定的K 值的范围。
4.(12分)已知系统结构图如下,试求系统的传递函数)(,)(s E s C0,3==p v (a )0,0==p v (b ) 2,0==p v (c ) 题4图 题2图6.(15分)某最小相位系统用串联校正,校正前后对数幅频特性渐近线分别如图中曲线(1)、(2)所示,试求校正前后和校正装置的传递函数)(),(),(21s G s G s G c ,并指出Gc (S )是什么类型的校正。
8.(12分)非线性系统线性部分的开环频率特性曲线与非线性元件负倒数描述曲线如下图所示,试判断系统稳定性,并指出)(1x N和G (j ω)的交点是否为自振点。
自动控制原理试卷A (2)1.(10分)已知某单位负反馈系统的开环传递函数为)5(4)(+=S S s G ,求该系统的单位脉冲响应和单位阶跃响应。
2.(10分)设单位负反馈系统的开环传递函数为)0()(3>=K SKs G ,若选定奈氏路径如图(a )(b )所示,试分别画出系统与图(a )和图(b )所对应的奈氏曲线,并根据所对应的奈氏曲线分析系统的稳定性。
3.(10分)系统闭环传递函数为2222)(nn n s s G ωξωω++=,若要使系统在欠阻尼情况下的单位阶跃响应的超调量小于16.3%,调节时间小于6s ,峰值时间小于6.28s ,试在S 平面上绘出满足要求的闭环极点可能位于的区域。
(8分) 4.(10分)试回答下列问题: (1) 串联超前校正为什么可以改善系统的暂态性能? (2) 从抑制扰动对系统的影响这一角度考虑,最好采用哪种校正方式? 5.(15分)对单位负反馈系统进行串联校正,校正前开环传递函数)12()(2++=S S S Ks G ,试绘制K 由0→+∞变化的根轨迹。
自动控制原理考试试卷及答案30套分析
自动控制原理试卷A(1)2. (10分)已知某系统初始条件为零,其单位阶跃响应为)0(8.08.11)(94≥+-=--t e e t h t t ,试求系统的传递函数及单位脉冲响应。
3.(12分)当ω从0到+∞变化时的系统开环频率特性()()ωωj j H G 如题4图所示。
K 表示开环增益。
P 表示开环系统极点在右半平面上的数目。
v 表示系统含有的积分环节的个数。
试确定闭环系统稳定的K 值的范围。
4.(12分)已知系统结构图如下,试求系统的传递函数)(,)(s E s C0,3==p v (a )0,0==p v (b ) 2,0==p v (c ) 题4图 题2图6.(15分)某最小相位系统用串联校正,校正前后对数幅频特性渐近线分别如图中曲线(1)、(2)所示,试求校正前后和校正装置的传递函数)(),(),(21s G s G s G c ,并指出Gc (S )是什么类型的校正。
8.(12分)非线性系统线性部分的开环频率特性曲线与非线性元件负倒数描述曲线如下图所示,试判断系统稳定性,并指出)(1x N和G (j ω)的交点是否为自振点。
自动控制原理试卷A (2)1.(10分)已知某单位负反馈系统的开环传递函数为)5(4)(+=S S s G ,求该系统的单位脉冲响应和单位阶跃响应。
2.(10分)设单位负反馈系统的开环传递函数为)0()(3>=K SKs G ,若选定奈氏路径如图(a )(b )所示,试分别画出系统与图(a )和图(b )所对应的奈氏曲线,并根据所对应的奈氏曲线分析系统的稳定性。
3.(10分)系统闭环传递函数为2222)(nn n s s G ωξωω++=,若要使系统在欠阻尼情况下的单位阶跃响应的超调量小于16.3%,调节时间小于6s ,峰值时间小于6.28s ,试在S 平面上绘出满足要求的闭环极点可能位于的区域。
(8分) 4.(10分)试回答下列问题: (1) 串联超前校正为什么可以改善系统的暂态性能? (2) 从抑制扰动对系统的影响这一角度考虑,最好采用哪种校正方式? 5.(15分)对单位负反馈系统进行串联校正,校正前开环传递函数)12()(2++=S S S Ks G ,试绘制K 由0→+∞变化的根轨迹。
自动控制理论II试卷16秋(A).doc
名姓 线号 学封卷试 密 学 大 峡 三2016年秋季学期《自动控制理论Ⅱ》课程考试试卷(A 卷)注意:1、本试卷共 3 页; 2、考试时间: 110 分钟 3、姓名、学号必须写在指定地方一、单项选择题。
(每小题2分,共16分)1.在水箱水温控制系统中,被控制量为( )。
A.水温B.水位C.水箱D.加热装置 2.若某系统的根轨迹有一个起点位于原点,则说明该系统( ) 。
A.含一个理想微分环节B.含两个积分环节C.为Ⅰ型系统D.速度误差系数为0 3.下列系统中稳定的系统是( )。
A.闭环极点为1,223s j =±的系统B.闭环特征方程为2210s s -+=的系统 C.阶跃响应为0.4()20(1)t c t e =+的系统 D.根轨迹全部位于s 平面左半部的系统4.若某负反馈控制系统的开环传递函数为3(2)s s +,则该系统的闭环特征方程为 ( )。
A.(2)0s s +=B.(2)30s s ++=C.(2)30s s +-=D.与是否为单位反馈系统有关 5. 某环节的传递函数为141s +,该环节是( ) A. 积分环节 B. 一阶惯性环节 C. 一阶微分环节 D.非最小相位环节 6.设开环传递函数为(2)()()(4)(6)k s G s H s s s s +=++,其根轨迹渐近线倾角为( )A. 2π±B. 3π±C. 4π±D. 07. 若某串联校正装置的传递函数为10507s s++,则该校正装置属于( )。
A .超前校正 B .滞后校正 C .PID 控制 D .超前-滞后校正 8. 状态方程()()()X t AX t Bu t =+的解0()()(0)()()tX t t X t Bu d φφτττ=+-⎰中,()(0)t X φ是( )A. 零输入解B. 零状态解C.全解D. 既不是零输入解也不是零状态解。
二、已知系统结构图如图所示:(1)求传递函数()()C s R s ;(2) 求传递函数()()C s N s 。