labview运动控制DEMO labview运动控制历程,labview调用
基于LabVIEW的多轴运动控制系统半实物仿真平台设计

基于LabVIEW的多轴运动控制系统半实物仿真平台设计基于LabVIEW的多轴运动控制系统半实物仿真平台设计摘要:随着工业自动化的不断发展,多轴运动控制系统在工业生产中的应用日益广泛。
为了提高系统的性能并减少实际试验中的风险与成本,本文设计了基于LabVIEW的多轴运动控制系统半实物仿真平台。
该平台通过软件仿真实现多轴运动控制的动态展示,使用户能够更直观地了解系统的工作原理以及调试参数。
本文首先介绍了多轴运动控制系统的基本原理和结构,然后详细阐述了平台的设计思路和实现过程,并通过实例验证了平台的可行性和有效性。
最后,对平台的不足之处进行了总结,并对未来的工作进行了展望。
关键词:多轴运动控制系统;半实物仿真平台;LabVIEW;动态展示;仿真实例1.引言多轴运动控制系统是一种广泛应用于机械加工、自动化生产等领域的高精度控制系统。
它通过控制驱动器和伺服电机来实现工作物体在多个轴向上的运动控制,可以实现较高的定位精度和运动速度,并且具有反馈控制的能力。
然而,为了确保系统的安全性和可靠性,在实际开发和试验中需要耗费大量的时间和资源。
因此,设计一种能够在实际试验之前对系统进行全面验证和调试的仿真平台具有重要的意义。
2.多轴运动控制系统的基本原理和结构多轴运动控制系统由伺服电机、传感器、运动控制器以及上位机等组成。
其中,伺服电机通过驱动器转换电能为机械能,可以控制物体的位置和速度。
传感器用于实时反馈物体的状态信息,如位置、速度和加速度等。
运动控制器是系统的核心部件,负责接收传感器的反馈信号,并通过控制算法生成合适的输出信号控制伺服电机。
上位机是用户与系统交互的界面,通过上位机可以输入运动参数和控制指令,实现运动轨迹的规划和控制。
3.基于LabVIEW的多轴运动控制系统半实物仿真平台设计为了满足对多轴运动控制系统进行全面仿真和调试的需求,本文设计了一种基于LabVIEW的半实物仿真平台。
该平台实现了具有动态展示功能的多轴运动控制系统的仿真,使用户能够更加直观地了解系统的工作原理和调试参数。
使用LabVIEW进行电机控制实现电机的速度和位置控制
使用LabVIEW进行电机控制实现电机的速度和位置控制LabVIEW是一种功能强大的图形化编程环境,被广泛应用于各种工程领域中,包括电机控制。
本文将介绍如何使用LabVIEW进行电机控制,实现对电机的速度和位置控制。
一、LabVIEW概述LabVIEW(Laboratory Virtual Instrument Engineering Workbench)是由美国国家仪器(National Instruments)公司开发的一款图形化编程环境。
其特点是可视化、易学易用,拥有许多强大的图形化编程工具和函数库,可以帮助工程师和科学家快速进行系统设计、数据采集、信号处理等工作。
二、LabVIEW中的电机控制1.速度控制要实现电机的速度控制,首先需要连接一个编码器或旋转传感器来获取电机的转速信息。
在LabVIEW中,可以使用DAQmx函数库中的函数来获取传感器的信号,并通过PID控制算法实现精准的速度控制。
在LabVIEW中创建一个新的VI(Virtual Instrument),然后从函数面板中选择相应的DAQmx函数,如"DAQmx Create Channel"来创建用于接收编码器信号的虚拟通道。
接着,可以使用"DAQmx Read"函数获取传感器的转速信号。
最后,通过编写PID控制算法,使用"PID.vi"函数来实现电机的速度控制。
2.位置控制要实现电机的位置控制,需要连接一个位置传感器,如光电编码器或磁编码器,并通过反馈控制算法实时检测电机的位置,并根据设定值进行控制。
在LabVIEW中,可以使用Encoder和PID函数库来实现电机的位置控制。
在LabVIEW中创建一个新的VI,然后在函数面板中选择Encoder 函数库中的函数,如"Initialize Encoders"来初始化编码器。
接着,使用"Read Encoder"函数实时读取电机的位置信息,并通过PID控制算法计算出控制信号。
基于labview的运动控制系统的软件设计

第一章绪论1.1课题来源以及研究的背景、目的和意义1.1.1课题来源本课题来源于某自动测试系统研究项目中的一部分,研究的硬件平台是一个四轴的运动执行机构,主要工作是设计出上位机软件和运动轨迹规划,要求软件具有易操作性、简单高效性、兼容性,实现运动执行机构的两个动子在X、Y两个方向上的协调运动快速精确的移动到指定的位置,误差范围控制在±3um内。
1.1.2课题研究的背景、目的和意义随着科技的飞速进步和社会的快速发展,于20世纪末,运动控制开始快速发展,并成为了自动化技术的一个关键的分支。
现代文明社会以及和谐社会的标志之一便是生活质量及水平,运动控制技术的发展也同时推动并代表了生活质量及水平。
在现代工业中,运动控制涉及了极其广泛的领域,并迅速地向前推进着,已经涵盖了汽车、纺织机械、冶金机械、家用电器、工业机器人等领域[1]。
虽然运动控制发展的时间并不算悠久,但是运动控制技术的提高也随着制造业对于产品加工的要求的提高在不断地水涨船高。
这也就导致了运动控制技术非常迅速的发展开来,尤其在高科技技术的方面为其提供了极为广阔的发展空间及市场。
现如今,运动控制技术及系统的普及和应用在自我进步的途中,影响了更多的产业,并与微电子技术、传感器技术等技术的发展和科技的进步相辅相成。
与此同时,运动控制在工业化技术中,承担起了重大的任务,因此,对于此技术进行分析,不但能够更深一层次的了解它的理论,还可以更好的在实际生活当中运用。
总而言之,运动控制技术的发展与其相关的技术的发展是共同进退的,其发展空间是巨大的,其将会创造的价值是不可估量的。
运动控制技术正逐渐成为一门具有显著特点,广泛应用于工业、军事及商业等领域,能够产生巨大经济效益的高新技术。
1.2运动控制系统的发展和研究现状人类对运动的控制可以追溯到我国古代用来指示方向的指南针,为中国的马均于公元235年研制的用齿轮传动、能自动指示方向的指南车模型。
指南车作为人类历史上第一架有稳定的机械结构,巧妙地运用了负反馈原理,非常类似于现在的恒值控制系统。
利用LabVIEW软件进行控制设计和仿真入门
利用LabVIEW软件进行控制设计和仿真入门这个章节将集中介绍LabVIEW软件中的控制系统设计的基本特性。
我们在这里假定读者们已经熟悉了LabVIEW软件的其它部分。
(如果你对LabVIEW软件的其它部分不熟悉,请参考Robert H. Bishop的‘Learning with LabVIEW’)。
每一章的专用信息会包含在那一章的简介中在我们开始之前,请确保你的计算机上已经安装了可使用的控制设计和仿真工具包。
它们不是LabVIEW 基本软件的一部分,而是需要单独购买的。
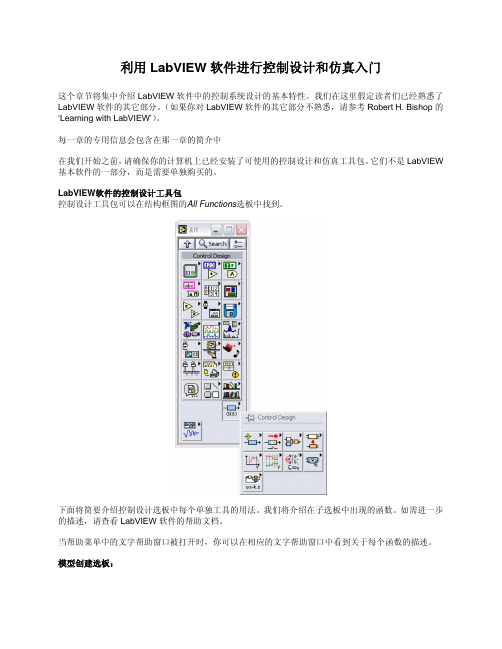
LabVIEW软件的控制设计工具包控制设计工具包可以在结构框图的All Functions选板中找到。
下面将简要介绍控制设计选板中每个单独工具的用法。
我们将介绍在子选板中出现的函数。
如需进一步的描述,请查看LabVIEW软件的帮助文档。
当帮助菜单中的文字帮助窗口被打开时,你可以在相应的文字帮助窗口中看到关于每个函数的描述。
模型创建选板:这节中的函数用于创建各种类型的模型,例如状态空间模型、传递函数模型和零点/极点/增益模型等。
下面将讨论创建状态空间模型和创建传递函数模型函数。
控制设计工具包中的创建状态空间模型函数的端子如上图所示。
如果采样间隔端子没有连接,那么系统被默认为是连续采样。
将一个值连到采样间隔端子上会使系统变为离散系统,它使用给定的时间作为采样间隔。
状态空间模型的A、B、C、D 矩阵都有对应的端子。
一旦LabVIEW软件创建了状态空间模型(其输出端子可用),该模型就可以用于其它函数并且可以转化成其它的形式,在这一节里我们将进行更加深入的讨论。
下面就是创建状态空间模型的一个例子。
它的输出端可以连接到控制设计工具包中很多其它函数上,作为它们的输入端。
输入端子既可以是常数(在结构框图中),也可以是控制量(在前面板中)。
为了使这个手册更容易理解,我们演示的大多数例子都是在结构图中使用常数,但是,使用前面板上的控制量时常会使效率更高。
labview与松下A6伺服 高精度闭环运动控制 Modbus通讯

7 -3、使用松下伺服支援软件编写block motion动作
4. Block Motion 编辑
7 -4、使用松下伺服支援软件编写block motion动作
5. 将参数传送到伺服驱动器EEP中
8、总结
到此松下伺服的全部内容就讲完了,希望 对大家有所帮助。
这里在提醒几句,请大家所使用串口调试 软件对报文进行监视,这样有助于发现问题, 另外要多花时间研究手册。
1. 使用普通usb mini线连接A6和PC 2. 在PC松下伺服支援软件 PANATERM ver.6.0
注意:支援软件 的详细操作参照 PANATERMforA6.PDF 文档
4-2.确定通讯规格
4-3.伺服参数设置
注意参数要保存在驱动器rom中, 保存后重启驱动器
4-4.伺服参数设置
5 -1.通讯报文详解
1、在所需线缆正常连接后我们尝试用串口调试助手发一组报文,首先要确保 A6通讯参数以及串口调试助手的参数一致且正确,这样我们才可以收到A6返 回的报文。 01 01 00 A4 00 01 BC 29
5 -2.通讯报文详解
对照modbus数据结构,我们看下数据结构 如右图,可以看出数据报文符合modbus。
大家阅读《 MINAS A6系列 技术资料 -Modbus通信规格篇》,对block motion 有所准备。
7 -2、使用松下伺服支援软件编写block motion动作
1. 打开 Block Motion 编辑器 2. 打开Block Motion参数编辑标签页 3. 设置Block Motion参数
注意:发送报文的最后两个byte是CRC校验码,它通过CRC计算器得到。 这里以使能srv-on为例,来计算校验码,注意数值颠倒。
labview完整教程详细解答
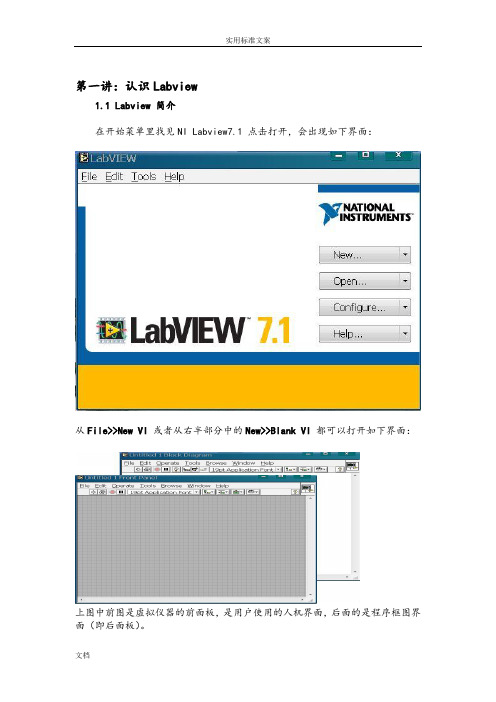
第一讲:认识Labview1.1 Labview 简介在开始菜单里找见NI Labview7.1 点击打开,会出现如下界面:从File>>New VI 或者从右半部分中的New>>Blank VI 都可以打开如下界面:上图中前图是虚拟仪器的前面板,是用户使用的人机界面,后面的是程序框图界面(即后面板)。
在LabVIEW的用户界面上,应特别注意它提供的操作模板,包括工具(Tools)模板、控制(Controls)模板和函数(Functions)模板。
这些模板集中反映了该软件的功能与特征。
下面我们来大致浏览一下。
工具模板(Tools Palette)如果该模板没有出现,则可以在Windows菜单下选择Show ToolsPalette命令以显示该模板。
当从模板内选择了任一种工具后,鼠标箭头就会变成该工具相应的形状。
当从Windows菜单下选择了Show Help Window功能后,把工具模板内选定的任一种工具光标放在流程图程序的子程序(Sub VI)或图标上,就会显示相应的帮助信息。
下面的两个模板是多层的,其中每一个子模板下还包括多个对象。
控制模板(Control Palette)Array注意:只有打开前面板时才能调用该模板该模板用来给前面板设置各种所需的输出显示对象和输入控制对象。
每个图标代表一类子模板。
如果控制模板不显示,可以用Windows菜单的Show ControlsPalette功能打开它,也可以在前面板的空白处,点击鼠标右键,以弹出控制模板。
控制模板如右图所示,它包括如下所示的一些子模板。
子模板中包括的对象,我们在功能中用文字简要介绍。
101112131415功能模板(Functions Palette)现功能模板。
功能模板是创建流程图程序的工具。
该模板上的每一个顶层图标都表示一个子模板。
若功能模板不出现,则可以用Windows菜单下的Show Functions Palette功能打开它,也可以在流程图程序窗口的空白处点击鼠标右键以弹出功能模板。
NI运动控制助手教程
NI MotionAssistant 和LabVIEW 入门本教程旨在帮助您快速创建强大运动控制应用NI 运动助手和LabVIEW。
NI 运动助手是LabVIEW 加载项提供了图形,点和单击界面与3D 可视化功能控制步进、伺服等电机。
这些三个练习将您熟悉NI 运动助手环境和教你如何创建您自己的运动助手脚本并将其转换为LabVIEW 程序。
在完成本教程,您将能够创建运动控制应用程序与直线和弧移动与集成的数据采集和图像采集。
本教程介绍了才刚开始。
一旦你已经完成,请感觉自由地探索环境——运动助手有众多的功能提供,包括与智能轮廓轮廓的移动,教模式、角拐轴和更多。
你可以了解更多有关运动助手在/motion样机半导体硅片加热应用程序使用运动助理和LabVIEW此应用程序的目的是以半导体晶圆片线性在舞台上移动入炉,并保持不指明烧伤在期间内。
在那之后晶圆片是迁离炉,取而代之的是另一个。
该系统由有长期的旅行长度线性阶段组成。
您可以通过NI 运动助手使用下面的步骤中创建一个脚本的原型此应用程序的运动部分:Step 1.引用移动——将移至其初始的起始位置,通过使用查找首页的线性阶段移动类型。
·Step 2。
直线移动——移动线性舞台上放入炉内的晶片。
·Step 3。
测量——等待指定的烧伤中的时间量。
Step 4。
直线移动——将晶圆片移回其原始位置。
·Step 5。
将转换为LabVIEW 或C 代码第1 步。
引用移动——将移至其初始的起始位置,通过使用查找首页的线性阶段移动类型。
插入一个引用移动的步骤,以将线性阶段移动到其初始的起始位置。
1.单击最左侧的应用程序窗口中的添加步骤按钮。
2.单击引用移动按钮。
3.单击对话框底部的新屏幕上的配置选项卡。
·此应用程序使用的议案只有一个轴,请单击1 (D) 按钮。
·:选择运动控制器。
·:选择计数(步骤)。
·:选择默认的轴1。
LabVIEW与控制系统设计实现系统控制和调节
LabVIEW与控制系统设计实现系统控制和调节LabVIEW (Laboratory Virtual Instrument Engineering Workbench) 是国家仪器标准委员会推荐的一种基于图形化编程语言的开发环境,广泛应用于各个领域的工程与科学研究中。
LabVIEW提供了直观、易于使用的图形化编程界面,使得控制系统的设计和实现更加高效和灵活。
本文将介绍LabVIEW在控制系统设计和实现中的应用,并探讨其对系统控制和调节的作用。
一、LabVIEW在控制系统设计中的应用1. 系统建模与仿真在控制系统设计阶段,首先需要对被控对象进行建模与仿真。
LabVIEW提供了丰富的数据采集和信号处理的工具,能够方便地获取实验数据,并通过图形化界面进行数据处理与分析。
基于这些功能,控制系统的建模与仿真可以在LabVIEW平台上进行,方便快捷。
2. 系统控制算法的设计与优化控制系统的性能主要取决于其中的控制算法。
LabVIEW提供了一系列的算法库和模块,涵盖了常见的控制算法,如PID控制、模糊控制、自适应控制等。
同时,LabVIEW还支持用户自定义算法的开发,方便针对不同的系统进行优化与调试。
3. 系统参数的自动调整与优化控制系统的参数调整对于系统的性能和稳定性至关重要。
LabVIEW 提供了参数自整定工具,可以实时监测和调整系统参数,降低调试的复杂性。
通过LabVIEW的优化算法,系统参数的自动调整可以更加快速和准确。
二、LabVIEW在系统控制与调节中的作用1. 实时控制与数据采集LabVIEW提供了强大的实时控制功能,能够对系统进行实时监控和控制。
通过与硬件的连接,LabVIEW可以获取实时数据,实现对系统参数的实时调整,并对系统运行状况进行实时监测。
这为系统的控制和调节提供了良好的基础。
2. 界面友好的人机交互LabVIEW的图形化界面使得系统的控制与调节更加直观和直观。
用户可以通过图形化的操作界面,实现对系统的控制参数的设置和调整,并即时查看系统响应及其相应的数据变化。
LabVIEW在运动控制系统实验平台的应用和实现_苏仔见
中图分类号: TP 273
文献标志码: A
文章编号: 1006 - 7167( 2011) 10 - 0038 - 02
Realization of Motion Control System Experimental Platform Based on LabVIEW
SU Zi-jian, NI Pan, XU Shao-lun ( School of Electronic Information and Electrical Engineering,Shanghai Jiaotong University,Shanghai 200240,China)
图 1 运动控制系统框图
1 传统运动控制系统平台
原有的运动控制系统平台的硬件组成包括触摸 屏、PLC、伺服驱 动 器、伺 服 电 机。 实 验 平 台 主 要 基 于 PLC,通过 CANopen 实现伺服电机的控制。HMI 实现 是基于施奈德的 XBT GT2330 来实现,通信方式同样 采用 Modbus 控制总线实现与 Twido PLC 的通信。系 统框图如图 2 所示。PLC 采用施奈德公司生产的一体 型 TWDLCAE40DRF。通信端口 为 EIA RS-485,最 大 波特率 为 19. 2kb / s,支 持 Modbus RTU 主 / 从 通 信 和 Modbus ASCII 通信[6]。伺服驱动器采用施奈德的交 流伺 服 驱 动 装 置 LXM05A,LXM05A 的 通 信 端 口 为 RJ45 接口,协议采用 Modbus 现场总线与上位机进行 通信[7]。由上级 PLC 控制系统来设定、监控给定值, 下级采用 Schneider Electric 伺服电机。
与探索,2008,27( 9) : 136-137. [12] 冯其红,赵修太,孙仁远. 加强示范中心内涵建设 全面提高实验
基于LabVIEW的运动控制系统的软件设计
基于LabVIEW的运动控制系统的软件设计一、本文概述随着工业自动化的快速发展,运动控制技术在各个领域中扮演着越来越重要的角色。
作为实现精确、高效运动控制的关键环节,运动控制系统的软件设计显得尤为重要。
本文旨在探讨基于LabVIEW的运动控制系统的软件设计方法,以期为相关领域的工程技术人员提供有益的参考和借鉴。
本文将首先介绍LabVIEW软件平台及其在运动控制系统中的应用优势,包括其图形化编程环境、丰富的库函数和强大的数据处理能力等。
随后,文章将详细阐述基于LabVIEW的运动控制系统软件设计的整体架构和关键模块,包括运动控制算法的实现、硬件接口的集成、数据采集与处理等。
本文还将探讨软件设计过程中的优化策略,以提高系统的实时性、稳定性和可靠性。
二、基础知识LabVIEW(Laboratory Virtual Instrument Engineering Workbench)是由美国National Instruments(NI)公司开发的一种图形化编程环境,广泛应用于数据采集、仪器控制、自动化测试等领域。
LabVIEW的强大之处在于其提供了丰富的虚拟仪器(VI)和图形化编程语言G,使得工程师和科学家能够通过直观的图形化编程来实现复杂的数据和信号处理任务。
运动控制系统是指利用计算机技术和自动控制理论,对机械运动部件的位置、速度、加速度等参数进行精确控制的系统。
在LabVIEW 中,通过集成的运动控制模块和驱动器,可以实现对步进电机、伺服电机等执行机构的精确控制。
理解运动控制的基本原理,如PID控制、前馈控制、反馈控制等,对于设计高效的运动控制系统至关重要。
数据采集是运动控制系统中的关键环节,它涉及到从传感器获取数据并将其转换为计算机可以处理的数字信号。
LabVIEW提供了强大的数据采集功能,用户可以通过各种硬件接口(如DAQ卡、USB、以太网等)连接传感器,并利用LabVIEW内置的函数和控件进行数据的采集、分析和处理。