汽车振动分析作业习题与参考答案(更新)
铁路车辆振动测试技术考核试卷
7.提高铁路车辆的速度会降低振动的强度。(×)
8.铁路车辆振动控制的目标是提高乘坐舒适性和保证行车安全。(√)
9.在铁路车辆振动测试中,只需要关注车辆在直线轨道上的振动情况。(×)
10.铁路车辆振动测试中,所有的测试设备都可以在任意环境下进行操作,不会影响测试精度。(×)
8.铁路车辆振动控制策略中,______是通过增加额外的质量来降低振动响应的方法。
9.铁路车辆振动测试中,为了防止信号干扰,应采取______措施。
10.铁路车辆振动的长期监测有助于提前发现和预防______等潜在问题。
四、判断题(本题共10小题,每题1分,共10分,正确的请在答题括号中画√,错误的画×)
D.声音传感器
4.在铁路车辆振动信号的时频分析中,常用的方法有()
A.短时傅里叶变换
B.小波变换
C.希尔伯特-黄变换
D.频谱分析
5.以下哪些措施有助于减少铁路车辆振动的干扰信号?()
A.优化传感器的安装位置
B.使用屏蔽电缆
C.增加信号滤波环节
D.提高信号采样频率
6.铁路车辆悬挂系统的设计参数对振动的影响包括()
3.铁路车辆悬挂系统的设计主要考虑______和______两个参数。
4.轨道不平顺度通常用______和______来表示。
5.铁路车辆振动测试中,为了保证测试数据的准确可靠,应选择______的传感器。
6.在进行铁路车辆振动信号的时频分析时,______变换可以提供信号的时频局部化信息。
7.用来评估铁路车辆振动对乘客舒适度影响的指标是______。
B.方差
C.均方根值
同济大学_汽车学院_汽车振动_郭荣_chapter2_作业答案

⎛ ⎜⎜⎝
k1k2
4(k1 + k2 )
⎞ ⎟⎟⎠
x2
Ue
=
1 2
ke x2
可得: ke
=
k1k2
4(k1 + k2
)
于是
f= 1 4π
k1k2
(k1 + k2 ) m
2.4 求图示系统的等效刚度。
解: ① 力和力矩分析
⎧ ⎨ ⎩
F1 + F2 = F1a = F2b
F
可得:
→
⎧⎨k1 ⎩ k1
x1 + k2 x2 = x1a = k2 x2b
(a + b)2 k1k2
F
→
F
=
(a + b)2 k1k2
a2k1 + b2k2
x
等效刚度为:
ke
=
(a + b)2 k1k2
a2k1 + b2k2
2.5 设有一均质等截面简支梁如图。在中间有一集中质量 m。如把梁本身质量 M 考虑在内,试计算此系统的等效质量。假定梁在自由振动时的动挠度曲线和简支 梁中间有集中静载荷作用下的静挠度曲线一样。
⎛ ⎜⎝
系统作微振动 sin θ
≈
θ;
1− cosθ
≈
1θ2 2
⎞ ⎟⎠
解:
(1)求总势能
( ) a:U = 1 k (a sinθ )2 + mgl(1 − cosθ ) ≈ 1 ka2 + mgl θ 2
2
2
b:U = 1 k (a sinθ )2 ≈ 1 ka2θ 2
2
2
( ) c:U = 1 k (a sinθ )2 − mgl(1 − cosθ ) ≈ 1 ka2 − mgl θ 2
汽车振动分析
汽车振动分析编辑整理:尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望(汽车振动分析)的内容能够给您的工作和学习带来便利。
同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为汽车振动分析的全部内容。
研究生试卷2013 年—2014年度第 2 学期评分:______________________课程名称:振动理论专业:车辆工程年级: 2013级任课教师:李伟研究生姓名:王荣学号: 2130940008注意事项1.答题必须写清题号;2.字迹要清楚,保持卷面清洁;3.试题随试卷交回;4.考试课按百分制评分,考查课可按五级分制评分;5.阅完卷后,授课教师一周内将成绩在网上登记并打印签名后,送研究生部备案;6.试题、试卷请授课教师保留三年被查。
《汽车振动分析》总结王荣(重庆交通大学机电与汽车工程学院重庆 400074)摘要:本课程由浅入深、循序渐进,从单自由度系统的简单问题逐渐加深到多自由度的分析,甚至是无限自由度系统,并从简单激励的振系逐渐推广到随机激振振系。
作为汽车理论及汽车设计等课程的基础,其对于分析汽车的行驶平顺性、乘坐舒适性、发动机的减振和隔离等具有良好的参考价值。
关键词:单自由度;多自由度;简单激振;随机激振The Conclusion of “Automotive VibrationAnalysis”Abstract: The course progressively, step by step, gradually discusses from the simple question of a single degree of freedom system to the analysis of a multi—degree of freedom system, even to the analysis of the infinite degree of freedom system. In addition, the course extends from simple energized vibration system to random energized vibration system. As the basis of Vehicle Theory and Vehicle Design, this course has direct reference value for the analysis of vehicle ride, comfort of passenger, engine vibration damping and isolation.Keywords:Single-Degree—of-Freedom; Multi—Degree—of—Freedom; Simple Energized Vibration System ;Random Energized Vibration System0 引言随着科学技术的日新月异和人民生活水平的日益提高,人们对汽车的动态性能,例如:汽车行驶的舒适性,操纵的稳定性,车内噪声水平及音质等等——提出了愈来愈高的要求。
湖北汽车工业学院大学物理习题解答机械振动题解
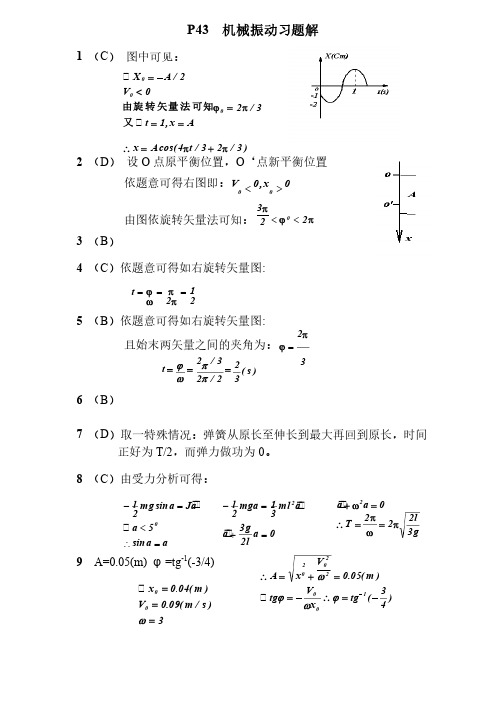
P43 机械振动习题解1 (C ) 图中可见:图中可见:2 (D ) 设O 点原平衡位置,O ‘点新平衡位置‘点新平衡位置依题意可得右图即:0x ,0V 00><由图依旋转矢量法可知:p j p2230<<3 (B )4 (C )依题意可得如右旋转矢量图:212t ===pp wj 5 (B )依题意可得如右旋转矢量图:且始末两矢量之间的夹角为:32p j =6 (B )7 (D )取一特殊情况:弹簧从原长至伸长到最大再回到原长,时间正好为T/2,而弹力做功为0。
8 (C )由受力分析可得:)由受力分析可得:9 A=0.05(m) φ=tg -1(-3/4))3/23/t 4cos(A x Ax ,1t 3/2:0V 2/A X 000p +p =\==p =j <-= 又由旋转矢量法可知aa sin 5a aJ a sin mg 2l 0=\<=- 0a l 2g 3a aml 31mga 2l 2=+=- g 3l222T 0a a 2p =w p =\=w + 3)s /m (09.0V )m (04.0x 00===w )s (322/23/2t ===p p w j )43(tg x V tg )m (05.0V x A 1002202-=\-==+=\-j w j w10 依右图由旋转矢量图可得:依右图由旋转矢量图可得:11 从图中可见:对X 2,2,0V ,0x ,0t 2000pj =\<== ,对X 1,2,0V ,0x ,0t 0100pj -=\>== , 合振动的振幅为:12A A A -=,合振动的初相为:合振动的初相为:2cos A cos A sin A sin A tg 20210120210110p j j j j j =++=-所以合振动方程为:)2T t 2cos(A A x 12p p +-=12 依题意可作旋转矢量合成图依题意可作旋转矢量合成图(如右图所示)(如右图所示)从图中可见:从图中可见:1121220,17.3,,10,62A cm A cm A cm p p j j j j ==-=\=-=-13解:根据曲线有:0.1A m =,0t =时0.05x m =,由旋转矢量得到3pj =,1t =时0x =可得56w p =于是振动方程为:50.1c o s ()63x t p p =-,质点到达P 点的时间满足3t p w =,0.4t s = 14解:,4,s 21T p w =\= 选平板位于最大位移处开始计时,选平板位于最大位移处开始计时,则其振动方程为:为:依物体的受力分析有:依物体的受力分析有:t 4cos A 16x t 4cos A x 2p p p -== Nmgt4cos 420t4cos Am 16mg N xm mg N xm N mg 2p p p +=+=-==- t4cos 420F NF p --=\-= tcos 10x )2/t cos(10x )t cos(10x 321p p p p p =-=+=设物体木板脱离时的振幅为A 0,两者脱离即:N=0,故有:15 解:取平衡位置为坐标的原点。
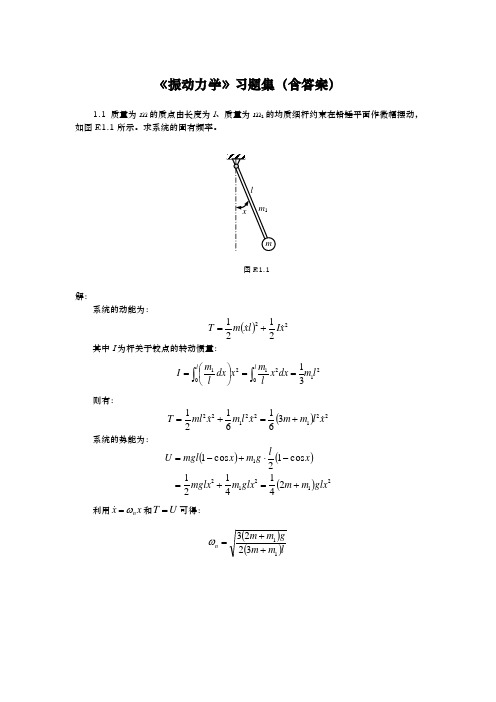
《振动力学》习题集(附答案解析)
(1)保持水平位置:
(2)微幅转动:
故:
2.10求图T 2-10所示系统的固有频率,刚性杆的质量忽略不计。
图 T 2-10答案图 T 2-10
解:
m的位置:
, ,
,
,
2.11 图T 2-11所示是一个倒置的摆。摆球质量为m,刚杆质量可忽略,每个弹簧的刚度为 。
(1)求倒摆作微幅振动时的固有频率;
(3)
故:
由(3)得:
2.5在图E2.3所示系统中,已知m,c,k, 和 ,且t=0时, , ,求系统响应。验证系统响应为对初值的响应和零初值下对激励力响应的叠加。
图E2.3
解:
,
求出C,D后,代入上面第一个方程即可得。
2.7 由一对带偏心质量的等速反向旋转齿轮构成的振动机械安装在弹簧和阻尼器构成的支承上,如图E2.7所示。当齿轮转动角速度为 时,偏心质量惯性力在垂直方向大小为 。已知偏心重W= 125.5N,偏心距e=15.0cm,支承弹簧总刚度系数k= 967.7N/cm,测得垂直方向共振振幅 ,远离共振时垂直振幅趋近常值 。求支承阻尼器的阻尼比及在 运行时机器的垂直振幅。
,当 时
重复n次得到:
,等号两边左乘
故:
,等号两边左乘
,当 时
即 ,当 时
重复运算:
,当 时
重复n次。
2.10图T 4-11所示的均匀刚性杆质量为m1,求系统的频率方程。
图 T 4-11
解:
先求刚度矩阵。
令 , ,得:
令 , ,得:
答
则刚度矩阵为:
再求质量矩阵。
令 , ,得:
,
令 , ,得:
,
则质量矩阵为:
(2)摆球质量m为0.9 kg时,测得频率 为1.5 Hz,m为1.8 kg时,测得频率为0.75 Hz,问摆球质量为多少千克时恰使系统处于不稳定平衡状态?
新能源汽车驱动电机振动与噪声控制考核试卷

考生__判卷人:__________
一、单项选择题(本题共20小题,每小题1分,共20分,在每小题给出的四个选项中,只有一项是符合题目要求的)
1.以下哪种因素不会导致新能源汽车驱动电机振动?()
D.所有上述条件
17.以下哪些部件可能参与新能源汽车驱动电机噪声的产生?()
A.电机转子
B.电机定子
C.传动系统
D.冷却系统
18.以下哪些方法可以用来分析新能源汽车驱动电机振动的数据?()
A.时域分析
B.频域分析
C.小波分析
D.主成分分析
19.新能源汽车驱动电机振动控制中,以下哪些方面是需要重点关注的?()
4.下列哪些因素会影响新能源汽车驱动电机的振动特性?()
A.电机温度
B.电机负载
C.车辆速度
D.路面状况
5.在新能源汽车驱动电机振动控制中,以下哪些措施是有效的?()
A.使用减振器
B.增加电机的结构强度
C.减少电机的负载
D.优化电机转子设计
6.以下哪些材料可以用于新能源汽车驱动电机的噪声控制?()
A.高密度泡沫材料
1. ABD
2. ABD
3. AB
4. ABCD
5. AB
6. ABC
7. ABC
8. ABC
9. AB
10. ABCD
11. ABC
12. ABC
13. ABCD
14. ABD
15. AB
16. ABCD
17. ABCD
18. ABC
19. ABC
20. ABCD
三、填空题
1.电磁力;机械振动
2.优化设计;隔音处理;吸声处理
汽车理论第六章答案
−W
当W=2时
⎛n⎞ 1 u ⎜ ⎟ = Gq (n0 )n0 2 2 Gq ( f ) = Gq (n0 )⎜ ⎟ u f ⎝ n0 ⎠
2
2 Gq ( f ) = (2πf ) Gq ( f ) = 4π 2Gq (n0 )n0 u 速度功率谱密度 &
2 加速度功率谱密度 Gq& ( f ) = (2πf ) Gq ( f ) = 16π 4Gq (n0 )n0 uf 2 & 4
§6-3 汽车振动系统的简化,单 质量系统的振动
一、汽车振动系统的简化 1.四轮汽车简化的立体模型
汽车的悬挂质量为:m2(车身、车架等) 汽车的非悬挂质量:m1(车轮、车轴) 汽车共7个自由度:
车身垂直、俯仰、侧倾3个自由度 车轮4个垂直自由度
6-3 单质量系统的振动
一、汽车振动系统的简化
1.四轮汽车简化 的立体模型
⎡ W 2 ( f )G ( f )df ⎤ aw= ∫ a ⎢ 0 .5 ⎥ ⎣ ⎦
80
1 2
3)当同时考虑椅面xs、ys、zs,这三个轴向振动时
,三个轴向的总加权加速度均方根值按下式计算
av= (1.4a xw ) + (1.4a yw ) + a
2 2
[
2 zw
]
1 2
6-1 人体对振动的反应和平顺性的评价
1.基本的评价方法 用基本的评价方法来评价时,先计算各轴向加权 加速度均方根值。具体有两种计算方法: 1)对记录的加速度时间历程a(t),通过相应频率 加权函数w(f)的滤波网络得到加权加速度时间历程 aw(t),按下式计算加权加速度均方根值
⎡1 T 2 ⎤ aw= ⎢ ∫ aw (t )dt ⎥ ⎣T 0 ⎦
机械振动基础作业(有答案-全版)
1.2 如果把双轴汽车的质量分别离散到前、后轴上去,在考虑悬架质量和非悬架质量两个离散质量的情况下,画出前轴或后轴垂直振动的振动模型简图,并指出在这种化简情况下,汽车振动有几个自由度?解:前轴或后轴垂直振动的振动模型简图为图1.2所示,此时汽车振动简化为二自由度振动系统。
2m 为非悬架质量,1m 为悬架质量1. 3设有两个刚度分别为21,k k 的线性弹簧如图T-1.3所示, 试证明:1)它们并联时的总刚度eq k 为:21k k k eq +=2)它们串联时的总刚度eq k 为:21111k k k eq +=证明:1) 如图T-1.3(a)所示,21,k k 两个弹簧受到力的作用,变形相同, 即2211k F k F k F eq ==, 而F F F =+21,故有 F F k kF k k eq eq =+21, 从而 21k k k eq +=2)如图T-1.3(b)所示,21,k k 两个弹簧受到相同的力作用 即∆=∆=∆=eq k k k F 2211 (1)且21∆+∆=∆ (2)由(1)和(2)有:)(21k Fk F k F eq += (3) 由(3)得:21111k k k eq += 1.8证明:两个同频率但不同相角的简谐运动的合成仍是同频率的简谐运动,即)cos()cos(cos θωϕωω-=-+t C t B t A ,并讨论ϕ=0,ππ,2三种特例。
证明:因t B t B t B ωϕωϕϕωsin sin cos cos )cos(+=-从而有t B t B A t B t A ωϕωϕϕωωsin sin cos )cos ()cos(cos ++=-+令 ()ϕϕϕθ222sin cos sin sin B B A B ++=则()[]t t B B A t B t A ωθωθϕϕϕωωsin sin cos cos sin cos )cos(cos 222+++=-+=())cos(sin cos 222θωϕϕ-++t B B A令C=()ϕϕ222sin cos B B A ++,则有 )cos()cos(cos θωϕωω-=-+t C t B t A当ϕ=0时,C=A+B ;当ϕ=2π时,22B A C +=,22BA arcsin +=B θ ;当ϕ=π时,B A -=C ,0=θ1.13汽车悬架减振器机械式常规性能试验台,其结构形式之一如图T-1.13所示。
汽车振动分析解析习题三
汽车振动分析解析习题三引言汽车振动是指汽车行驶过程中由于道路不平整、发动机工作不平稳等因素引起的车辆部件的振动现象。
对汽车的振动进行分析解析,不仅可以帮助我们了解振动现象的成因和特性,还可以为汽车设计和优化提供参考。
本文将介绍汽车振动分析解析的习题三,包括问题描述、求解过程和最终结果。
问题描述一辆汽车行驶在一条水平道路上,假设汽车的质量为m,发动机输出功率为P,行驶速度为v。
已知汽车的弹簧刚度为k,阻尼常数为c。
现在要求分析汽车的振动情况。
求解过程步骤一:建立力学模型由于汽车行驶过程中存在许多力的作用,为了简化问题,我们可以将汽车视为一个单自由度弹簧振子模型。
汽车的质量可以视为振子的质量,弹簧刚度和阻尼常数可以视为振子的弹簧刚度和阻尼常数。
步骤二:列出振动方程根据单自由度振子的运动方程,可以得到汽车振动的微分方程为:m * x'' + c * x' + k * x = F(t)其中,m为振子的质量,x为振子的位移,c为振子的阻尼常数,k为振子的弹簧刚度,F(t)为外力的作用。
在本问题中,外力即为汽车产生的振动力。
步骤三:求解振动方程根据振动方程,我们可以求解该微分方程并得到振动的解析解。
由于本问题涉及到汽车行驶的情况,我们需要考虑发动机的工作状态和道路的不平整程度。
步骤四:分析振动情况通过解析解,我们可以对汽车的振动情况进行分析。
可以研究振动的频率、振幅、相位等特性,并与实际情况进行比较。
通过分析振动情况,可以了解振动的成因,进一步优化汽车的设计和改善行驶舒适性。
最终结果通过以上求解过程和振动分析,我们可以得知汽车振动的特性,并进行进一步的优化和改进。
同时,我们也能更好地了解汽车行驶过程中振动的成因,为汽车的设计和行驶舒适性提供参考。
总结本文介绍了汽车振动分析解析的习题三,包括问题描述、求解过程和最终结果。
通过分析汽车的振动情况,我们可以更好地了解振动的成因和特性,并为汽车的设计和优化提供参考。
汽车振动学习题解答
sin( d dt) dv en (t )d
en (t ) v
n
则
I2
n (cost ent cosdt) ( d )(sint ent sin dt)
2 2 n
(
d
)2
x(t) F0
2md
t 0
en (t )
cos(
d
dt)d
t 0
en (t )
cos(
d
dt)d
0.2389
2
nTd
n
Td
3.9242rad / s
又知 所以
n2
k m
2 n
c m
F0 2N
X
m
k
n2
c 2m
3rad / s
F0
31.8195 kg
n 59.66 Ns / m
0.7645
n 7.41mm
k (1 2 )2 (2)2
2 arctan 1 2
41.32o
2t
2
sin
4t
xp
R
2
cos t
R l
2
cos 2t
1 12
R l
3
2
cos 2t
cos 4t
因此 f2 (t) m2 xp
m2 R
2
cos
t
R l
cos
2t
1 12
R l
3
cos
2t
cos
4t
从而 f (t) f1(t) f2 (t)
(m1
m2
)R
2
cos t
m2 R
2
R l
cos
2t
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1、 方波振动信号的谐波分析,00,02(),2T x t x t T x t T⎧<<⎪⎪=⎨⎪-<<⎪⎩。
绘制频谱图。
解:()x t 的数学表达式可写为: 计算三要素:()a n =0202()()sin 22Tn t b n x t dt T T π⎛⎫ ⎪= ⎪⎪⎝⎭⎰=20042sin Tn t x dt T T π⎛⎫ ⎪⎝⎭⎰=0222cos T n t n T ππ⎡⎤⎛⎫ ⎪⎢⎥⎝⎭⎣⎦=()021cos ,1,2,x n n n ππ-=⋅⋅⋅⋅⋅⋅⎡⎤⎣⎦ =4,1,3,5x n nπ=⋅⋅⋅⋅⋅⋅ 01()cos sin 222n n n a n t n t X t a b T T ππ∞=⎛⎫ ⎪∴=++ ⎪ ⎪⎝⎭∑=12sin n n n t b T π∞=∑=0142sin n x n t nT ππ∞=∑,n=1,3,5, ⋅⋅⋅⋅⋅⋅,02T t <<或2Tt T <<振幅频谱图4,1,3,5n n x A b n nπ===⋅⋅⋅⋅⋅⋅ ()⎩⎨⎧≤≤-≤≤-=02/2/00t T T t x x t x相位频谱图1tan 0,1,3,5n n n a n b φ-⎛⎫===⋅⋅⋅⋅⋅⋅⎪⎝⎭2、 求周期性矩形脉冲波的复数形式的傅立叶级数,绘频谱图。
解: 数学表达式:计算三要素:傅立叶级数复数形式:频谱图0000,0sin ,0,n x t n TA x n t n n n T ππ⎧=⎪⎪=⎨⎪≠-∞<<∞⎪⎩()⎪⎪⎪⎩⎪⎪⎪⎨⎧≤≤≤≤--≤≤-=220222200000T t t t t t x t t T t x 偶函数 T x t a 0002=2sin 2010tn n x a n ωπ⋅=0=n b 2sin 22010tn n x a ib a X n n nn ωπ⋅==-=()2sin 1101012/2/02/2/102/2/02/2/010********t n n x tin e e T x t in e T x dt e x T dt e t x T X t in t in t t t in t in t t tin T T n ωπωωωωωωω⋅=--⋅=-⋅=⋅⋅=⋅⋅=-------⎰⎰T t x t n n x X n 00010002sinlim =⋅=→ωπ()∑∑∞-∞=∞-∞===n tin n t in n e n t n x e X t x 112sin 010ωωωπ2.1解: (1)能量法222341222111()()222e a a k x k x k x a a += 2232122244e a a k k k a a ∴=+(2)能量法222 (1214)111222e a m x m x m x a ⎛⎫+= ⎪⎝⎭212124e a m m m a ∴=+(3)固有频率222132224211e e k a k a k p m a m a m +==+2.3解:平衡位置系统受力如图 则122,2F G F G == 弹簧1k 变形112G x k =,弹簧变形222Gx k =,且m 静位移1222x x x =+ 12124422e G G Gx x x k k k ∴==+=+ ()1212,4e e k k k m m k k ∴==+∴固有圆频率()121212e e k k k p m k k m==+2.5解对数衰减率:111110ln ln 0.06920 2.5j A j A δ+=== 相对阻尼系数:22110.01122110.069ζππδ===⎛⎫⎛⎫++ ⎪ ⎪⎝⎭⎝⎭衰减系数:9.80.0110.3140.012n k g n ms ζωζζ===== 阻尼系数:220.3149 5.652(/)c nm N s m ==⨯⨯=临界阻尼: 5.652513.8(/)0.011c cc N s m ζ=== 2.7解受力分析如图-xs ’)单自由度振动系统振动微分方程()2022s sn n n smx c x x kx mx cx kx cx x x x x ζωωζω+-+=∴++=∴++=设iwtcs x e =,则()c cs x H x ω=22222()212n n n i iH i iζωωζλωωωζωωλζλ∴==-+-+()H ω=,相位差角:122tan ()12ζλπϕλ-=--()()()()()i iwt i wt s x t H x t H e ae ϕϕωω--===()0sin )s x a t x t t ωωϕ=∴=-Xa =其中,n ωλω==ζ= 2.8 解:1、 系统的振动微分方程为:0=⎪⎭⎫ ⎝⎛-+++•••s x x k kx x c x m即:s kx kx x c x m =++2激励函数为:()T t t Tdk kx s ≤≤=0 傅立叶级数三要素:kd tdt T dk T a T ==⎰002()0cos 20=⋅=⎰dt nwt t T dk T a T n()πn kd dt nwt t T d k T b T n -=⋅=⎰sin 20所以,激励函数的前四项为:()()()∑=⋅+⋅+=41sin cos 2n n n s t n b t n a a kx ωω)4sin 413sin 312sin 21(sin 2wt wt wt wt d k d k+++-=π 系统稳态响应的前三项为:])6()91(3)3sin()4()41(2)2sin()2()1()sin([24)2()1(2)sin(4222322222221312222ζλλψζλλψζλλψπλζλψ+--++--++---=+--+=∑=wt wt wt dd n n k nwt b d x n n n 其中3,2,1,12arctan22=-=n n n n λλζψ2.9 解:运用杜哈美积分法())]03.0sin()02.0(sin(50)03.0cos()02.0cos(5.0[)03.0sin()03.0(sin )(1)03.0sin(03.0)];01.0sin(50)01.0cos(5.0[)01.0sin()01.0(sin )50(1)01.0sin(01.0);01.00(50)(;)(sin )(1sin )(sin )(1sin )/(cos 20001.0020001.00000000000.0p p p p p mpF p p d p f mp p p x s t p p p mp F p pd p F F mpp px s t t t F F t f d t p f mppt p d t p f mp pt p x pt x t t t ---+=-+==+-+=--+==≤≤-=-+=-+⎪⎭⎫ ⎝⎛+=⎰⎰⎰⎰υτττυυτττυτττυτττχ时,当时,当4.1解直接法()11121221111221222213222212320()0()0()0m x k k x k x m x k x k x x m x k x x k x m x k x k k x ++-=⎧+--=⎧⎪⇒⎨⎨+-+=-++=⎪⎩⎩122111223222000k k k m x x k k k m x x +-⎡⎤⎡⎤⎡⎤⎡⎤∴+=⎢⎥⎢⎥⎢⎥⎢⎥-+⎣⎦⎣⎦⎣⎦⎣⎦其中,122223k k k K k k k +-⎡⎤=⎢⎥-+⎣⎦拉格朗日法系统为无阻尼自由振动系统,拉格朗日方程形式为:0ii id TT Udt q q q δδδδδδ⎛⎫-+= ⎪⎝⎭ 广义坐标为:12,x x2211221122T m x m x =+ 0,1,2iTi x δδ== 111111,T d T m x m x x dt x δδδδ⎛⎫== ⎪⎝⎭222222,T d T m x m x x dt x δδδδ⎛⎫== ⎪⎝⎭()2221122132111222U k x k x x k x =+-+ 112212213212(),()U U k x k x x k x x k x x x δδδδ=--=-+ ∴()11121221111221222213222212320()0()0()0m x k k x k x m x k x k x x m x k x x k x m x k x k k x ++-=⎧+--=⎧⎪⇒⎨⎨+-+=-++=⎪⎩⎩影响系数法令121,0x x ==11112112k k x k x k k =+=+ 2112212k k k x k ==-=-令120,1x x ==22223223k k x k x k k =+=+122223k k k K k k k +-⎡⎤∴=⎢⎥-+⎣⎦4.2解:直接法∴111213311113112332212123222111222333232331333122233()()0()0()()0()0()()0()0J k r k r J k r k r k r k r J k r k r J k r k r k r k r J k r k r J k r k r k r k r θθθθθθθθθθθθθθθθθθθθθθθθθθθ⎧⎧----=++--=⎪⎪+---=⇒-++-=⎨⎨⎪⎪+-+-=--++=⎩⎩ ∴12300100000100001J M J J J ⎡⎤⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦131311223223211121112k r k rk r k r K k rk r k r k r kr k rk rk r k r +----⎡⎤⎡⎤⎢⎥⎢⎥=-+-=--⎢⎥⎢⎥⎢⎥⎢⎥--+--⎣⎦⎣⎦4.3解a,1234mmMmm⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦,1222233334444k k kk k k kKk k k kk k+-⎡⎤⎢⎥-+-⎢⎥=⎢⎥-+-⎢⎥-⎢⎥⎣⎦b,1234mmMmm⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦,222233334444k kk k k kKk k k kk k-⎡⎤⎢⎥-+-⎢⎥=⎢⎥-+-⎢⎥-⎢⎥⎣⎦c,1234mmMmm⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦,12222333344443k k kk k k kKk k k kk k k+-⎡⎤⎢⎥-+-⎢⎥=⎢⎥-+-⎢⎥-+⎢⎥⎣⎦4.4解:质心位于距左端34l处0324l m xdx mllx lm⎛⎫+⎪==⎪⎪⎝⎭⎰令1,0xθ==11211223442 k kx kx kl kl k k kx kx l=+===-=-令0x=,1θ=22233544448l l k k k l l kl θθ=+= ∴刚度矩阵为,222528kl kK kl kl ⎡⎤-⎢⎥=⎢⎥⎢⎥-⎢⎥⎣⎦令1,0x θ==1122m mx m ∴==21120m m ==令0,1x θ==222524m I ml θ==,3222445()424ll m l I x dx m ml l -=+=⎰∴质量矩阵为,2205024mM ml ⎡⎤⎢⎥=⎢⎥⎣⎦22202205502428kl mk x x klml kl θθ⎡⎤-⎡⎤⎢⎥⎡⎤⎡⎤⎢⎥∴+=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥-⎣⎦⎢⎥⎣⎦特征矩阵为,22222222552824n n nkl k m H K M kl kl ml ωωω⎡⎤--⎢⎥=-=⎢⎥⎢⎥--⎢⎥⎣⎦将20n H K M ω=-=整理为,22422221440335n n m ll km k l ωω-+=求得特征值为,2120.735k k m m ω⎛=≈ ⎝,222 3.265k k mm ω⎛=+≈ ⎝ 2n H K M ω=-的伴随阵,2222558242222n n kl kl ml adjH kl k m ωω⎡⎤-⎢⎥=⎢⎥⎢⎥-⎢⎥⎣⎦将22120.735, 3.265k km mωω==代入 得对应特征向量,1211,1.0599.06A A l l ⎡⎤⎡⎤⎢⎥⎢⎥==-⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦则主振型矩阵为,111.0599.06A l l ⎡⎤⎢⎥=-⎢⎥⎢⎥⎣⎦模态质量矩阵为21111201.0599.06 1.0599.065024TT P mM A MA ml l l l l ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥==--⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦2.2340019.1mm ⎡⎤=⎢⎥⎣⎦模态刚度矩阵为21111221.0599.06 1.0599.06528TT P kl k K A KA kl kl l l l l ⎡⎤-⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥==⎢⎥--⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥⎣⎦1.6420062.362kk ⎡⎤=⎢⎥⎣⎦归一化因子为,i α==∴归一化因子方阵,0.669000.229R ⎤=⎥⎦ ∴正则振型矩阵为,110.6690.2290.66901.0599.060.708 2.07500.229N A AR ll l l ⎡⎤⎡⎤⎡⎤⎢⎥⎥===--⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎣⎦⎦正则模态质量矩阵为,20.6690.2290.6690.229200.9990.0000.7082.0750.708 2.07550.000 1.002024TTN N N mM A MA ml ll l l ⎡⎤⎡⎤⎡⎤⎡⎤⎥⎥⎢===--⎢⎥⎢⎥⎢⎥⎢⎣⎦⎢⎥⎢⎥⎣⎦⎦正则模态刚度矩阵为,20.6690.2290.6690.22920.7340.00020.7082.0750.708 2.07550.0003.16528T TN N N kl kk K A KA kl m kl l l l l ⎡⎤-⎡⎤⎡⎤⎢⎥⎡⎤⎥⎥===⎢--⎢⎥⎢⎥⎢⎥⎣⎦⎢-⎢⎥⎢⎥⎦⎦⎢⎣⎦第一阶主振型示意图,1N 为节点1第二阶主振型示意图,2N 为节点1.265习题4.6解:(1)直接法,受力如图f f k )r r l ϕ2m ρϕ2()()0()()0r r f f r r r f f f mz k z l k z l m k z l l k z l l ϕϕρϕϕϕ+++-=⎧⎪⎨++--=⎪⎩222()()0()()0f r r r f f r r f f r r f f mz k k z k l k l m k l k l z k l k l ϕρϕϕ+++-=⎧⎪⇒⎨+-++=⎪⎩ 运动微分方程为222000f r r r f f r rf f r r f f k k k l k l mz z k l k lk l k l m ρϕϕ+-⎡⎤⎡⎤⎡⎤⎡⎤+=⎢⎥⎢⎥⎢⎥⎢⎥-+⎣⎦⎣⎦⎣⎦⎣⎦ 特征矩阵为222222f r r r f fr r f f r r f f k k m k l k l H K M k l k l k l k l m ωωωρ⎡⎤+--=-=⎢⎥-+-⎢⎥⎣⎦由20H K M ω=-=得()()2422222()0f r r r f f f r f r m k k m kl k l m k k l l ρωρω⎡⎤-+++++=⎣⎦21ω=22ω=H 的伴随矩阵22222r r f ff f r r f f r r f r k l k l m k l k l adjH k l k l k k m ωρω⎡⎤+--=⎢⎥-+-⎢⎥⎣⎦将固有频率21ω、22ω代入adjH ,得主振型:22(1)(2)1211,f r f r f f r r f f r r k k m k k m A A k l k l k l k l ωω⎡⎤⎡⎤⎢⎥⎢⎥+-+-==⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦(2)f f r r k l k l = 则运动微分方程变为22200000f r r r f f k k mz z k l k l m ρϕϕ+⎡⎤⎡⎤⎡⎤⎡⎤+=⎢⎥⎢⎥⎢⎥⎢⎥+⎣⎦⎣⎦⎣⎦⎣⎦ z自由度的固有频率为ω=ϕ自由度的固有频率为ω=两运动互不相关 (3)2f r l l ρ=()()21,22fr f f r r f f r rf rll k l k l k l k l ml l ω++±-=若f f r r k l k l >()()2212,f r rf r ffrl l k l l k ml ml ωω++==,(1)(2)111,1f r A A l l ⎡⎤⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥--⎢⎥⎢⎥⎣⎦⎣⎦若f f r r k l k l <()()2212,f r ff r rrfl l k l l k ml ml ωω++==,(1)(2)111,1f r A A l l ⎡⎤⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥--⎢⎥⎢⎥⎣⎦⎣⎦4.9柔度矩阵 F=1111122123k ⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦刚度矩阵 K=1210121011F k --⎡⎤⎢⎥⎢⎥=--⎢⎥⎢⎥-⎣⎦质量矩阵 000000J M J J ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦所以222362422322025600nnnn n n nk J kH K M k k J kJ J k Jk k kk J ωωωωωωω--=-=---=-+-+=--解得:2(1)2(2)2(3)0.2, 1.5, 3.2nn n k k k J J Jωωω===(1)(2)(3)N1111.80.5 1.22.240.750.441111.80.5 1.22.240.750.440.330.740.62A0.60.370.740.740.560.27P0.5TCpA A AA⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥===-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎡⎤⎢⎥⎢⎥∴=-⎢⎥⎢⎥-⎣⎦∴⎡⎤⎢⎥⎢⎥=-⎢⎥⎢⎥-⎣⎦=对应主振型正则振型矩阵TN NPNiNi2Pi PiN0.67P A P0.11.5T sin t0.249.26000 1.81000 2.634.07k00K K00.75k0008.97kPXK M0.6XTP p PTp PJA MA JJA Aωω⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥∴==-⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥⎣⎦⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥⎣⎦=-∴=质量模态矩阵 M刚度模态矩阵简谐力作用下2222N N2274.07k9.26J0.110.75k1.81J0.248.97k 2.63J0.0094.07k9.26J0.539X=A X0.75k1.81J0.4938.97k 2.63Jωωωωωω⎡⎤⎢⎥-⎢⎥⎢⎥-⎢⎥-⎢⎥⎢⎥-⎢⎥⎢⎥-⎣⎦∴-⎡⎤⎢⎥-⎢⎥⎢⎥=⎢⎥-⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦物理坐标下位移响应4.102222(1)2(2)(1)(2)P TP P Pi Pi i i 0202202113,,A ,A 1111A 11Q 0P P A P Q 2Q X P (1cos t)/n nnnn m k k M K m kk k mk H K M kk mk k m m ωωωωωωω-⎡⎤⎡⎤==⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦--∴=-==--⎡⎤⎡⎤∴====⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎡⎤∴=⎢⎥⎢⎥-⎣⎦⎡⎤⎡⎤=∴==⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦=-对应主振型由杜哈梅积分得2P 2P P 0m X 2k Q(1cos t)312mQ X A X (13k 1ω⎡⎤⎢⎥∴=⎢⎥-⎢⎥⎣⎦⎡⎤∴==-⎢⎥⎢⎥⎣⎦5.1 解:系统质量刚度矩阵分别为22,2m kk m k k k M K m kk k m kk -⎡⎤⎡⎤⎢⎥⎢⎥--⎢⎥⎢⎥==⎢⎥⎢⎥--⎢⎥⎢⎥-⎣⎦⎣⎦第一瑞丽商:假设21111112111112111,0.2;2211111222;1233123411,0.1234;22111112221,0.112331234TTTT A KA k A p A MA m A MA k p A MFMA m k p trD m⎡⎤⎢⎥⎢⎥===⎢⎥⎢⎥⎣⎦⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎡⎤⎢⎥⎢⎥===⎢⎥⎢⎥⎣⎦⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥⎣⎦1则第二瑞丽商:1系统柔度矩阵 F=k 假设 A 则邓克莱法:m D=FM=则k这三种方法中,第二瑞丽商精度最高,邓克莱法计算结果偏小。