stm32f407串口收发函数
stm32串口数据读取函数

stm32串口数据读取函数STM32是一款广泛应用于嵌入式系统的微控制器,具有强大的性能和丰富的外设资源。
其中,串口是一种常用的通信接口,用于与其他设备进行数据交换。
本文将介绍如何使用STM32串口数据读取函数进行数据接收。
一、STM32串口简介在嵌入式系统中,串口是一种基本的通信方式,通过串口可以实现与其他设备的数据交换。
STM32提供了多个串口接口,如USART、UART等,可以满足不同应用的需求。
二、串口数据读取函数在STM32中,串口数据读取函数主要通过读取串口接收缓冲区来获取数据。
根据不同的串口接口,使用不同的函数进行数据读取。
1. USART串口数据读取函数USART串口是一种全双工的串口接口,可以同时进行数据的发送和接收。
在STM32中,可以使用HAL库提供的函数来实现USART串口数据的读取。
需要初始化串口并开启接收中断。
接着,在中断回调函数中,使用HAL_UART_Receive函数进行数据的读取。
该函数需要传入串口句柄、数据缓冲区和数据长度作为参数,可以实现指定长度的数据读取。
2. UART串口数据读取函数UART串口是一种半双工的串口接口,只能进行数据的发送或接收。
与USART串口相比,UART串口的读取函数较为简单。
在STM32中,可以使用HAL库提供的函数来实现UART串口数据的读取。
使用HAL_UART_Receive函数进行数据的读取,该函数需要传入串口句柄、数据缓冲区和数据长度作为参数,可以实现指定长度的数据读取。
三、应用实例以下是一个使用USART串口读取数据的示例:```c#include "stm32f4xx.h"#include "stm32f4xx_hal.h"#define BUFFER_SIZE 10UART_HandleTypeDef huart;uint8_t rx_buffer[BUFFER_SIZE];void USART1_IRQHandler(void){HAL_UART_IRQHandler(&huart);}void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) {if (huart->Instance == USART1){// 数据读取完成后的处理操作}}int main(void){HAL_Init();SystemClock_Config();huart.Instance = USART1;huart.Init.BaudRate = 115200;huart.Init.WordLength = UART_WORDLENGTH_8B;huart.Init.StopBits = UART_STOPBITS_1;huart.Init.Parity = UART_PARITY_NONE;huart.Init.Mode = UART_MODE_RX;huart.Init.HwFlowCtl = UART_HWCONTROL_NONE;huart.Init.OverSampling = UART_OVERSAMPLING_16;if (HAL_UART_Init(&huart) != HAL_OK){// 串口初始化失败}HAL_UART_Receive_IT(&huart, rx_buffer, BUFFER_SIZE);while (1){// 主程序其他操作}}```在上述示例中,首先进行了串口的初始化配置,然后开启了串口的接收中断。
STM32F407VGT6的485通信程序【SP34

【SP3485芯片&xx接收】本例程为STM32F4XX(M4内核)的485通信程序,采用串口1发送和接收数据,中断接收,将接收到的数据重新发送出去。
主函数文件如下:#include ""/**********************************************************\**文件名:****************************************库版本:***********工作环境:RealView MDK-ARM ***********************作者:曾有根***************************************生成日期:2012-08-03 ************************************功能:RS485通过串口1发送,中断接收!将接收到*****的数据通过再次发送出去*********************\************************************************ **********/extern void uart_init(void);extern void USART1_SendByte(u8 Data);extern unsigned char UART1_GetByte(u8 GetData);extern void delay(unsigned int dl);void delay(unsigned int dl){unsigned int i,y;for(i = 0; i < 5000; i++){for(y = 0; y < dl; y++);}}static void led_init(void){GPIO_InitTypeDef GPIO_InitStructure;/* Enable the GPIO_LED Clock */RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOE, ENABLE);/* Configure the GPIO_LED pin */= GPIO_Pin_7 | GPIO_Pin_8 ;= GPIO_Mode_OUT;= GPIO_OType_PP;= GPIO_PuPd_UP;= GPIO_Speed_50MHz;GPIO_Init(GPIOE, &GPIO_InitStructure);}int main(void){uart_init();led_init();while (1){USART1_SendByte(0x12);GPIO_SetBits(GPIOE, GPIO_Pin_7 ); //LED1灯闪烁,表示数据发送完成delay(1000);GPIO_ResetBits(GPIOE, GPIO_Pin_7 );delay(1000);}}串口配置程序,文件如下:#include ""extern void delay(unsigned int dl);#define TX_485 GPIO_SetBits(GPIOA,GPIO_Pin_8);#define RX_485 GPIO_ResetBits(GPIOA,GPIO_Pin_8);void USART1_SendByte(u8 SendData){TX_485;//打开发送控制端delay(10);//延时,这个必须加上,不加会导致数据出错USART_SendData(USART1,SendData);//发送数据while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);//等待数据发送完成delay(10);RX_485;//关闭发送控制端}unsigned char UART1_GetByte(u8 MidData){RX_485;//打开接收控制端delay(10);//延时,同样必须加上MidData = USART_ReceiveData(USART1);//接收数据delay(10);TX_485;//关闭接收控制端return MidData;}void USART1_IRQHandler(u8 GetData){u8 BackData;if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)//中断产生{GetData = UART1_GetByte(BackData);//直接读取寄存器的数据也行GetData = USART1->DR;USART1_SendByte(GetData);//发送数据GPIO_SetBits(GPIOE, GPIO_Pin_8 );//LED2灯闪烁,表示数据接收成功且发送完成delay(1000);GPIO_ResetBits(GPIOE, GPIO_Pin_8 );}}void uart_init(void){USART_InitTypeDef USART_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;GPIO_InitTypeDef GPIO_InitStructure;/* Enable GPIO clock */RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);/* Enable USART clock */RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);/* Connect USART pins to A9\10 */GPIO_PinAFConfig(GPIOA, GPIO_PinSource9,GPIO_AF_USART1);GPIO_PinAFConfig(GPIOA, GPIO_PinSource10,GPIO_AF_USART1);/* Configure USART Tx and Rx as alternate function push-pull */= GPIO_Pin_9;//输出TX= GPIO_Speed_50MHz;= GPIO_Mode_AF;//必须为AF,OUT不行= GPIO_OType_PP;= GPIO_PuPd_UP;GPIO_Init(GPIOA, &GPIO_InitStructure);= GPIO_Pin_10;//输入RX= GPIO_Mode_AF;//必须为AF,与M3不同GPIO_Init(GPIOA, &GPIO_InitStructure);= GPIO_Pin_8 ;//485使能端配置= GPIO_Mode_OUT;= GPIO_OType_PP;= GPIO_PuPd_UP;= GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);= 115200;= USART_WordLength_8b;= USART_StopBits_1;= USART_Parity_No;= USART_HardwareFlowControl_None;= USART_Mode_Rx | USART_Mode_Tx;USART_Init(USART1, &USART_InitStructure); NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1); = USART1_IRQn;= 1;= 0;= ENABLE;NVIC_Init(&NVIC_InitStructure);/* Enable USART */USART_Cmd(USART1, ENABLE);USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);USART_ClearFlag(USART1, USART_FLAG_TC);}说明:已经经本人下载至STM32F4的开发板上成功调试,并且能够正确的收发数据!可供广大奋斗在前线的机油们参考!。
STM32串口读写迪文屏8位、16位、32位数据(应用层实现)

STM32串口读写迪文屏8位、16位、32位数据(应用层实现)文章目录•前言•一、串口需要的相关实现•o▪数据类型▪需要自定义实现的变量和函数•二、迪文屏读写•o 2.1 向迪文屏写数据o 2.2 从迪文屏读取数据前言基于STM32F407实现与迪文串口屏T5L系列的串口通信,实现8位,16位,32位的数据读写。
PS:不包含完整程序,这里只说一下核心的代码。
一、串口需要的相关实现数据类型#define u8 unsigned char#define u16 unsigned short#define u32 unsigned int//32位int与8位char互转typedef union{u32 intdata;u8 chardata[4];}int_char_unioin;//16位short与8位char互转typedef union{u16 shortdata;u8 chardata[2];}short_char_unioin;需要自定义实现的变量和函数1.buffer——串口收发缓冲区数组。
2.send_buffer()——向串口发送buffer数组。
3.delay_time——等待迪文屏返回数据的时间,例:5ms,迪文屏上OS的周期是20ms,读写过快可能出问题。
(可能有更好的方法,一般情况下几ms还是可以容忍的。
)4.clear_usart()——清空串口缓冲区数组buffer,如用memset()将数组置零即可。
二、迪文屏读写STM32与迪文屏的通信核心在于向迪文屏中定义的变量进行读写,迪文屏中的变量用一个16位数据表示其地址。
迪文屏的用户可操作地址空间为0x1000-0xFFFF,我们要做的就是在这个区间内的一个地址上读写数据,这个地址指向的数据类型由DGUS II(迪文屏开发上位机软件)设置,详细内容可以查看迪文公司的应用开发指南。
2.1 向迪文屏写数据向迪文屏上的16位地址写8位,16位,32位数据。
stm32f103与stm32f407can通讯

//stm32f407程序:#include "sys.h"#include "delay.h"#include "usart.h"#include "can.h"int main(void){u8 i=0;u8 canbuf[8];u8 Can_Send_Flag;NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);delay_init(168);uart_init(115200);CAN1_Mode_Init(CAN_SJW_1tq,CAN_BS2_6tq,CAN_BS1_7tq,3,CAN_Mode_N ormal);for(i=0;i<8;i++)canbuf[i]=i;Can_Send_Flag=CAN1_Send_Msg(canbuf,8);//发送8个字节Can_Send_Flag=CAN1_Send_Msg(canbuf,8);//发送8个字节if(Can_Send_Flag) printf("data Send failed");else printf("data Send ok");while(1);}//can.c#include "can.h"#include "delay.h"#include "usart.h"//CAN初始化//tsjw:重新同步跳跃时间单元.范围:CAN_SJW_1tq~ CAN_SJW_4tq//tbs2:时间段2的时间单元. 范围:CAN_BS2_1tq~CAN_BS2_8tq;//tbs1:时间段1的时间单元. 范围:CAN_BS1_1tq ~CAN_BS1_16tq//brp :波特率分频器.范围:1~1024; tq=(brp)*tpclk1//波特率=Fpclk1/((tbs1+1+tbs2+1+1)*brp);//mode:CAN_Mode_Normal,普通模式;CAN_Mode_LoopBack,回环模式;//Fpclk1的时钟在初始化的时候设置为42M,如果设置CAN1_Mode_Init(CAN_SJW_1tq,CAN_BS2_6tq,CAN_BS1_7tq,6,CAN_Mode_LoopBack );//则波特率为:42M/((6+7+1)*6)=500Kbps//返回值:0,初始化OK;// 其他,初始化失败;u8 CAN1_Mode_Init(u8 tsjw,u8 tbs2,u8 tbs1,u16 brp,u8 mode){GPIO_InitTypeDef GPIO_InitStructure;CAN_InitTypeDef CAN_InitStructure;CAN_FilterInitTypeDef CAN_FilterInitStructure;#if CAN1_RX0_INT_ENABLENVIC_InitTypeDef NVIC_InitStructure;#endif//使能相关时钟RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);//使能PORTA时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1, ENABLE);//使能CAN1时钟//初始化GPIOGPIO_InitStructure.GPIO_Pin = GPIO_Pin_11| GPIO_Pin_12;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MHzGPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化PA11,PA12//引脚复用映射配置GPIO_PinAFConfig(GPIOA,GPIO_PinSource11,GPIO_AF_CAN1); //GPIOA11复用为CAN1GPIO_PinAFConfig(GPIOA,GPIO_PinSource12,GPIO_AF_CAN1); //GPIOA12复用为CAN1//CAN单元设置CAN_InitStructure.CAN_TTCM=DISABLE; //非时间触发通信模式CAN_InitStructure.CAN_ABOM=DISABLE; //软件自动离线管理CAN_InitStructure.CAN_AWUM=DISABLE;//睡眠模式通过软件唤醒(清除CAN->MCR的SLEEP位)CAN_InitStructure.CAN_NART=ENABLE; //禁止报文自动传送CAN_InitStructure.CAN_RFLM=DISABLE; //报文不锁定,新的覆盖旧的CAN_InitStructure.CAN_TXFP=DISABLE; //优先级由报文标识符决定CAN_InitStructure.CAN_Mode= mode; //模式设置CAN_InitStructure.CAN_SJW=tsjw; //重新同步跳跃宽度(Tsjw)为tsjw+1个时间单位 CAN_SJW_1tq~CAN_SJW_4tqCAN_InitStructure.CAN_BS1=tbs1; //Tbs1范围CAN_BS1_1tq~CAN_BS1_16tqCAN_InitStructure.CAN_BS2=tbs2;//Tbs2范围CAN_BS2_1tq ~CAN_BS2_8tqCAN_InitStructure.CAN_Prescaler=brp; //分频系数(Fdiv)为brp+1CAN_Init(CAN1, &CAN_InitStructure); // 初始化CAN1//配置过滤器CAN_FilterInitStructure.CAN_FilterNumber=0; //过滤器0CAN_FilterInitStructure.CAN_FilterMode=CAN_FilterMode_IdMask;CAN_FilterInitStructure.CAN_FilterScale=CAN_FilterScale_32bit; //32位CAN_FilterInitStructure.CAN_FilterIdHigh=0x0000;////32位IDCAN_FilterInitStructure.CAN_FilterIdLow=0x0000;CAN_FilterInitStructure.CAN_FilterMaskIdHigh=0x0000;//32位MASKCAN_FilterInitStructure.CAN_FilterMaskIdLow=0x0000;CAN_FilterInitStructure.CAN_FilterFIFOAssignment=CAN_Filter_FIFO0;//过滤器0关联到FIFO0CAN_FilterInitStructure.CAN_FilterActivation=ENABLE; //激活过滤器0CAN_FilterInit(&CAN_FilterInitStructure);//滤波器初始化#if CAN1_RX0_INT_ENABLECAN_ITConfig(CAN1,CAN_IT_FMP0,ENABLE);//FIFO0消息挂号中断允许.NVIC_InitStructure.NVIC_IRQChannel = CAN1_RX0_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; // 主优先级为1NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; // 次优先级为0 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);#endifreturn 0;}#if CAN1_RX0_INT_ENABLE //使能RX0中断//中断服务函数void CAN1_RX0_IRQHandler(void){CanRxMsg RxMessage;int i=0;CAN_Receive(CAN1, 0, &RxMessage);for(i=0;i<8;i++)printf("rxbuf[%d]:%d\r\n",i,RxMessage.Data[i]);}#endif//can发送一组数据(固定格式:ID为0X12,标准帧,数据帧)//len:数据长度(最大为8)//msg:数据指针,最大为8个字节.//返回值:0,成功;// 其他,失败;u8 CAN1_Send_Msg(u8* msg,u8 len){u8 mbox;u16 i=0;CanTxMsg TxMessage;TxMessage.StdId=0x12; // 标准标识符为0TxMessage.ExtId=0x12; // 设置扩展标示符(29位)TxMessage.IDE=0; // 使用扩展标识符TxMessage.RTR=0; // 消息类型为数据帧,一帧8位TxMessage.DLC=len; // 发送两帧信息for(i=0;i<len;i++)TxMessage.Data[i]=msg[i]; // 第一帧信息mbox= CAN_Transmit(CAN1, &TxMessage);i=0;while((CAN_TransmitStatus(CAN1,mbox)==CAN_TxStatus_Failed)&&(i<0XFFF))i++; //等待发送结束if(i>=0XFFF)return 1;return 0;}//can口接收数据查询//buf:数据缓存区;//返回值:0,无数据被收到;// 其他,接收的数据长度;u8 CAN1_Receive_Msg(u8 *buf){u32 i;CanRxMsg RxMessage;if( CAN_MessagePending(CAN1,CAN_FIFO0)==0)return 0; //没有接收到数据,直接退出CAN_Receive(CAN1, CAN_FIFO0, &RxMessage);//读取数据for(i=0;i<RxMessage.DLC;i++)buf[i]=RxMessage.Data[i];return RxMessage.DLC;}#ifndef __CAN_H#define __CAN_H#include "sys.h"//CAN1接收RX0中断使能#define CAN1_RX0_INT_ENABLE 0 //0,不使能;1,使能.u8 CAN1_Mode_Init(u8 tsjw,u8 tbs2,u8 tbs1,u16 brp,u8 mode);//CAN初始化u8 CAN1_Send_Msg(u8* msg,u8 len); //发送数据u8 CAN1_Receive_Msg(u8 *buf); //接收数据#endif//stm32f103程序:#include "led.h"#include "delay.h"#include "sys.h"#include "usart.h"#include "can.h"int main(void){delay_init();NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);uart_init(115200); //串口初始化为115200CAN_Mode_Init(CAN_SJW_1tq,CAN_BS2_3tq,CAN_BS1_8tq,3,CAN_Mode_Nor mal);//CAN普通模式初始化, 波特率500Kbpswhile(1);}//can.c#include "can.h"#include "led.h"#include "delay.h"#include "usart.h"//CAN初始化//tsjw:重新同步跳跃时间单元.范围:CAN_SJW_1tq~ CAN_SJW_4tq//tbs2:时间段2的时间单元. 范围:CAN_BS2_1tq~CAN_BS2_8tq;//tbs1:时间段1的时间单元. 范围:CAN_BS1_1tq ~CAN_BS1_16tq//brp :波特率分频器.范围:1~1024; tq=(brp)*tpclk1//波特率=Fpclk1/((tbs1+1+tbs2+1+1)*brp);//mode:CAN_Mode_Normal,普通模式;CAN_Mode_LoopBack,回环模式;//Fpclk1的时钟在初始化的时候设置为36M,如果设置CAN_Mode_Init(CAN_SJW_1tq,CAN_BS2_8tq,CAN_BS1_9tq,4,CAN_Mode_LoopBack); //则波特率为:36M/((8+9+1)*4)=500Kbps//返回值:0,初始化OK;// 其他,初始化失败;u8 CAN_Mode_Init(u8 tsjw,u8 tbs2,u8 tbs1,u16 brp,u8 mode){GPIO_InitTypeDef GPIO_InitStructure;CAN_InitTypeDef CAN_InitStructure;CAN_FilterInitTypeDef CAN_FilterInitStructure;#if CAN_RX0_INT_ENABLENVIC_InitTypeDef NVIC_InitStructure;#endifRCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);//使能PORTA 时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1, ENABLE);//使能CAN1时钟GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化IOGPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //上拉输入GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化IO//CAN单元设置CAN_InitStructure.CAN_TTCM=DISABLE; //非时间触发通信模式CAN_InitStructure.CAN_ABOM=DISABLE; //软件自动离线管理CAN_InitStructure.CAN_AWUM=DISABLE; //睡眠模式通过软件唤醒(清除CAN->MCR的SLEEP位)CAN_InitStructure.CAN_NART=ENABLE; //禁止报文自动传送CAN_InitStructure.CAN_RFLM=DISABLE; //报文不锁定,新的覆盖旧的CAN_InitStructure.CAN_TXFP=DISABLE; //优先级由报文标识符决定CAN_InitStructure.CAN_Mode= mode; //模式设置: mode:0,普通模式;1,回环模式;//设置波特率CAN_InitStructure.CAN_SJW=tsjw; //重新同步跳跃宽度(Tsjw)为tsjw+1个时间单位 CAN_SJW_1tq CAN_SJW_2tq CAN_SJW_3tq CAN_SJW_4tqCAN_InitStructure.CAN_BS1=tbs1; //Tbs1=tbs1+1个时间单位CAN_BS1_1tq ~CAN_BS1_16tqCAN_InitStructure.CAN_BS2=tbs2; //Tbs2=tbs2+1个时间单位CAN_BS2_1tq ~ CAN_BS2_8tqCAN_InitStructure.CAN_Prescaler=brp; //分频系数(Fdiv)为brp+1CAN_Init(CAN1, &CAN_InitStructure); //初始化CAN1CAN_FilterInitStructure.CAN_FilterNumber=0; //过滤器0CAN_FilterInitStructure.CAN_FilterMode=CAN_FilterMode_IdMask; //屏蔽位模式CAN_FilterInitStructure.CAN_FilterScale=CAN_FilterScale_32bit; //32位宽CAN_FilterInitStructure.CAN_FilterIdHigh=0x0000; //32位IDCAN_FilterInitStructure.CAN_FilterIdLow=0x0000;CAN_FilterInitStructure.CAN_FilterMaskIdHigh=0x0000;//32位MASKCAN_FilterInitStructure.CAN_FilterMaskIdLow=0x0000;CAN_FilterInitStructure.CAN_FilterFIFOAssignment=CAN_Filter_FIFO0;//过滤器0关联到FIFO0CAN_FilterInitStructure.CAN_FilterActivation=ENABLE;//激活过滤器0CAN_FilterInit(&CAN_FilterInitStructure); //滤波器初始化#if CAN_RX0_INT_ENABLECAN_ITConfig(CAN1,CAN_IT_FMP0,ENABLE);//FIFO0消息挂号中断允许.NVIC_InitStructure.NVIC_IRQChannel = USB_LP_CAN1_RX0_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; // 主优先级为1NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; // 次优先级为0 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);#endifreturn 0;}#if CAN_RX0_INT_ENABLE //使能RX0中断//中断服务函数void USB_LP_CAN1_RX0_IRQHandler(void){CanRxMsg RxMessage;int i=0;CAN_Receive(CAN1, 0, &RxMessage);for(i=0;i<8;i++)printf("rxbuf[%d]:%d\r\n",i,RxMessage.Data[i]);printf("data Receive Successed\r\n");}#endif//can发送一组数据(固定格式:ID为0X12,标准帧,数据帧)//len:数据长度(最大为8)//msg:数据指针,最大为8个字节.//返回值:0,成功;// 其他,失败;u8 Can_Send_Msg(u8* msg,u8 len){u8 mbox;u16 i=0;CanTxMsg TxMessage;TxMessage.StdId=0x12; // 标准标识符TxMessage.ExtId=0x12; // 设置扩展标示符TxMessage.IDE=CAN_Id_Standard; // 标准帧TxMessage.RTR=CAN_RTR_Data; // 数据帧TxMessage.DLC=len; // 要发送的数据长度for(i=0;i<len;i++)TxMessage.Data[i]=msg[i];mbox= CAN_Transmit(CAN1, &TxMessage);i=0;while((CAN_TransmitStatus(CAN1,mbox)==CAN_TxStatus_Failed)&&(i<0XFFF))i++; //等待发送结束if(i>=0XFFF)return 1;return 0;}//can口接收数据查询//buf:数据缓存区;//返回值:0,无数据被收到;// 其他,接收的数据长度;u8 Can_Receive_Msg(u8 *buf){u32 i;CanRxMsg RxMessage;if( CAN_MessagePending(CAN1,CAN_FIFO0)==0)return 0; //没有接收到数据,直接退出CAN_Receive(CAN1, CAN_FIFO0, &RxMessage);//读取数据for(i=0;i<8;i++)buf[i]=RxMessage.Data[i];return RxMessage.DLC;}#ifndef __CAN_H#define __CAN_H#include "sys.h"//CAN接收RX0中断使能#define CAN_RX0_INT_ENABLE 1 //0,不使能;1,使能.u8 CAN_Mode_Init(u8 tsjw,u8 tbs2,u8 tbs1,u16 brp,u8 mode);//CAN初始化u8 Can_Send_Msg(u8* msg,u8 len); //发送数据u8 Can_Receive_Msg(u8 *buf); //接收数据#endif。
完整word版,STM32f407 一个串口收传给另一个串口再发送出去串口收发设置

/* Includes ------------------------------------------------------------------*/#include "stm32f4xx_conf.h"#include <stdio.h>void Delay(__IO uint32_t nCount);//***********************************************//函数功能:延时ms//入口参数:延时长度//出口参数:无//备注://************************************************void Delay_ms(u16 ms){u32 j;for(;ms>0;ms--)for(j=0;j<9700;j++);}//***********************************************//函数功能:IO配置//入口参数:无//出口参数:无//备注://************************************************void GPIO_Configuration(void){GPIO_InitTypeDef GPIO_InitStructure;/* GPIOD Periph clock enable */RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOC, ENABLE);/* Configure PD12, PD13, PD14 and PD15 in output pushpull mode */ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;GPIO_Init(GPIOC, &GPIO_InitStructure);/* Configure PA0 pin as input floating *///GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN;//GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;//GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;//GPIO_Init(GPIOA, &GPIO_InitStructure);}//***********************************************//函数功能:UART配置//入口参数:无//出口参数:无//备注://************************************************void USART_Configuration(void){USART_InitTypeDef USART_InitStructure;USART_ART_BaudRate =9600; //波特率USART_ART_WordLength = USART_WordLength_8b; //8 位数据USART_ART_StopBits = USART_StopBits_1; //停止位USART_ART_Parity = USART_Parity_No;// 校验方式:无USART_ART_HardwareFlowControl = USART_HardwareFlowControl_None; //硬件流控制失能USART_ART_Mode = USART_Mode_Rx | USART_Mode_Tx; // 发送/接收使能/* Enable GPIO clock */RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOC, ENABLE);/* Enable UART clock */RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3, ENABLE);/* Connect PXx to USARTx_Tx*/GPIO_PinAFConfig(GPIOC, GPIO_PinSource10, GPIO_AF_USART3);/* Connect PXx to USARTx_Rx*/GPIO_PinAFConfig(GPIOC, GPIO_PinSource11, GPIO_AF_USART3);GPIO_StructInit(&GPIO_InitStructure);/* Configure USART Tx as alternate function */GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOC, &GPIO_InitStructure);/* Configure USART Rx as alternate function */GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;GPIO_Init(GPIOC, &GPIO_InitStructure);/* USART configuration */USART_Init(USART3,&USART_InitStructure);USART_ITConfig(USART3,USART_IT_RXNE,ENABLE);USART_ITConfig(USART3,USART_IT_TXE,ENABLE);/* Enable USART */USART_Cmd(USART3, ENABLE);/* Enable UART clock */RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART6, ENABLE); /* Connect PXx to USARTx_Tx*/GPIO_PinAFConfig(GPIOC, GPIO_PinSource6, GPIO_AF_USART6); /* Connect PXx to USARTx_Rx*/GPIO_PinAFConfig(GPIOC, GPIO_PinSource7, GPIO_AF_USART6); GPIO_StructInit(&GPIO_InitStructure);/* Configure USART Tx as alternate function */GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOC, &GPIO_InitStructure);/* Configure USART Rx as alternate function */GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;GPIO_Init(GPIOC, &GPIO_InitStructure);/* USART configuration */USART_Init(USART6,&USART_InitStructure);USART_ITConfig(USART6,USART_IT_RXNE,ENABLE);//USART_ITConfig(USART6,USART_IT_TXE,ENABLE);/* Enable USART */USART_Cmd(USART6, ENABLE);}void NVIC_Config(void){NVIC_InitTypeDef NVIC_InitStructure;NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);//嵌套优先级分组为1 NVIC_InitStructure.NVIC_IRQChannel = USART3_IRQn; //嵌套通道为USART3_IRQn NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //抢占优先级为0 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //响应优先级为0 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //通道中断使能NVIC_Init(&NVIC_InitStructure);NVIC_InitStructure.NVIC_IRQChannel = USART6_IRQn; //嵌套通道为USART6_IRQn NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority =0; //抢占优先级为0 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //响应优先级为0 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //通道中断使能NVIC_Init(&NVIC_InitStructure);}/*** @brief Main program* @param None* @retval None*** @brief Delay Function.* @param nCount:specifies the Delay time length.* @retval None*/void Delay(__IO uint32_t nCount){while(nCount--){}}/**int fputc(int ch, FILE *f){/* Place your implementation of fputc here *//* e.g. write a character to the USART */USART_SendData(USART6, (uint8_t) ch);/* Loop until the end of transmission */while (USART_GetFlagStatus(USART6, USART_FLAG_TC) == RESET){}return ch;}#ifdef USE_FULL_ASSERT/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/void assert_failed(uint8_t* file, uint32_t line){/* User can add his own implementation to report the file name and line number, ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* Infinite loop */while (1){}}#endif/*** @}*//*** @}*//*中断*/uint8_t Uart3_Buffer[255];uint8_t temp;uint8_t Flag=0;int RxCounter=0;int i=0;void USART3_IRQHandler(void){if(USART_GetITStatus(USART3,USART_IT_RXNE)!= RESET) //中断产生{USART_ClearITPendingBit(USART3,USART_IT_RXNE); //清除中断标志if(RxCounter==0){temp=USART_ReceiveData(USART3);if(temp==FRAMEHEAD)/*FRAMEHEAD*/Uart3_Buffer[RxCounter++]=temp;}else{Uart3_Buffer[RxCounter++]=USART_ReceiveData(USART3);if(RxCounter==FRAMELEN)/*FRAMELEN*/{Flag=1;RxCounter=0;}if(USART_GetFlagStatus(USART3,USART_FLAG_ORE) == SET){USART_ClearFlag(USART3,USART_FLAG_ORE);USART_ReceiveData(USART3);}}}if(USART_GetITStatus(USART3,USART_IT_TXE)!= RESET){USART_ClearITPendingBit(USART3,USART_IT_TXE);if(Flag){for(i=0;i<FRAMELEN;i++){USART_SendData(USART3,Uart3_Buffer[i]); //发送数据while(USART_GetFlagStatus(USART3,USART_FLAG_TC)==RESET); {} }Flag=0;}}}uint8_t Flag6=0;int RxCounter6=0;uint8_t temp6;uint8_t Uart6_Buffer[255];void USART6_IRQHandler(void){if(USART_GetITStatus(USART6,USART_IT_RXNE)!= RESET){USART_ClearITPendingBit(USART6,USART_IT_RXNE);if(RxCounter6==0){temp6=USART_ReceiveData(USART6);if(temp6==FRAMEHEAD)/*FRAMEHEAD*/Uart6_Buffer[RxCounter6++]=temp6;}else{Uart6_Buffer[RxCounter6++]=USART_ReceiveData(USART6);if(RxCounter6==FRAMELEN)/*FRAMELEN*/{Flag6=1;RxCounter6=0;}if(USART_GetFlagStatus(USART6,USART_FLAG_ORE) == SET){USART_ClearFlag(USART6,USART_FLAG_ORE);USART_ReceiveData(USART6);}}}}{int i=0;int j=0;GPIO_Configuration();USART_Configuration();NVIC_Config();while (1){}}。
记录stm32f407使用hal库,串口2重定向到printf的一些问题(已解决)
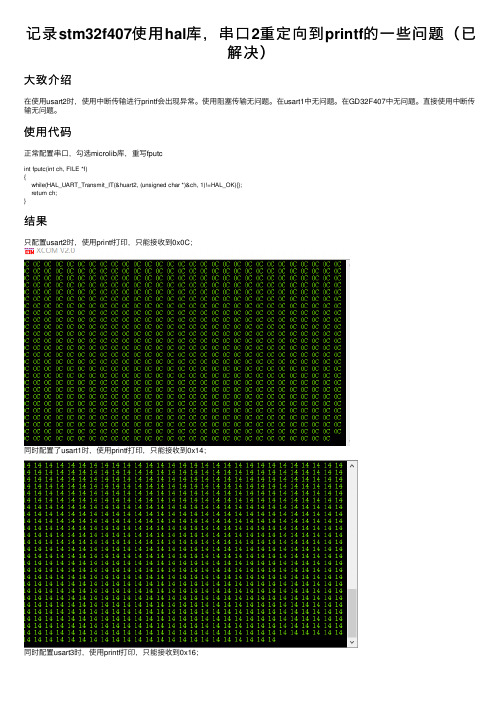
记录stm32f407使⽤hal库,串⼝2重定向到printf的⼀些问题(已解决)⼤致介绍在使⽤usart2时,使⽤中断传输进⾏printf会出现异常。
使⽤阻塞传输⽆问题。
在usart1中⽆问题。
在GD32F407中⽆问题。
直接使⽤中断传输⽆问题。
使⽤代码正常配置串⼝,勾选microlib库,重写fputcint fputc(int ch, FILE *f){while(HAL_UART_Transmit_IT(&huart2, (unsigned char *)&ch, 1)!=HAL_OK){};return ch;}结果只配置usart2时,使⽤printf打印,只能接收到0x0C;同时配置了usart1时,使⽤printf打印,只能接收到0x14;同时配置usart3时,使⽤printf打印,只能接收到0x16;同时配置usart6时,使⽤printf打印,只能接收到0x1e;原因所在在查询串⼝相关的讯息时,考虑到不使⽤microlib库打印会如何。
加⼊标准库⽀持后,打印正常。
#pragma import(__use_no_semihosting)//标准库需要的⽀持函数struct __FILE{int handle;};FILE __stdout;/*** @brief 定义_sys_exit()以避免使⽤半主机模式* @param void* @return void*/void _sys_exit(int x){x = x;}同时发现,使⽤微库时,优化等级也会造成影响。
在-o3,-o2,-o1时时,除了usart1以外,其他的均会出现以上情况。
-o0时,⼀切正常。
(以上均是仅测试usart1,usart2,usart3)。
考虑到有在⽹上见到过:选上Use MicroLIB,例如你⽤printf()函数的时候,就会从串⼝1输出字符串,直接默认定向到串⼝1。
法1可实现串⼝1数据输出,但要定向到串⼝2,串⼝3,microLIB就不合⽤了;这样的⾔论,也许有⼀定关系吧。
STM32f407-一个串口收传给另一个串口再发送出去串口收发设置

/* Includes ------------------------------------------------------------------*/ #include ""#include <>void Delay(__IO uint32_t nCount);* @param nCount:specifies the Delay time length.* @retval None*/void Delay(__IO uint32_t nCount){'while(nCount--){}}/**int fputc(int ch, FILE *f){*/* Place your implementation of fputc here *//* . write a character to the USART */USART_SendData(USART6, (uint8_t) ch);/* Loop until the end of transmission */while (USART_GetFlagStatus(USART6, USART_FLAG_TC) == RESET){}return ch;}?#ifdef USE_FULL_ASSERT/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/void assert_failed(uint8_t* file, uint32_t line){(/* User can add his own implementation to report the file name and line number, ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* Infinite loop */while (1){}}#endif/*** @}%*//*** @}*//*中断*/uint8_t Uart3_Buffer[255];uint8_t temp;—uint8_t Flag=0;int RxCounter=0;int i=0;void USART3_IRQHandler(void){if(USART_GetITStatus(USART3,USART_IT_RXNE)!= RESET) //中断产生{USART_ClearITPendingBit(USART3,USART_IT_RXNE); //清除中断标志if(RxCounter==0){、temp=USART_ReceiveData(USART3);if(temp==FRAMEHEAD) /*FRAMEHEAD*/Uart3_Buffer[RxCounter++]=temp;}else{Uart3_Buffer[RxCounter++]=USART_ReceiveData(USART3);if(RxCounter==FRAMELEN) /*FRAMELEN*/{Flag=1;~RxCounter=0;}if(USART_GetFlagStatus(USART3,USART_FLAG_ORE) == SET){USART_ClearFlag(USART3,USART_FLAG_ORE);USART_ReceiveData(USART3);}}}if(USART_GetITStatus(USART3,USART_IT_TXE)!= RESET)、{USART_ClearITPendingBit(USART3,USART_IT_TXE);if(Flag){for(i=0;i<FRAMELEN;i++){USART_SendData(USART3,Uart3_Buffer[i]); //发送数据while(USART_GetFlagStatus(USART3,USART_FLAG_TC)==RESET); {} }Flag=0;、}}}uint8_t Flag6=0;int RxCounter6=0;uint8_t temp6;uint8_t Uart6_Buffer[255];void USART6_IRQHandler(void),{if(USART_GetITStatus(USART6,USART_IT_RXNE)!= RESET){USART_ClearITPendingBit(USART6,USART_IT_RXNE);if(RxCounter6==0){temp6=USART_ReceiveData(USART6);if(temp6==FRAMEHEAD) /*FRAMEHEAD*/Uart6_Buffer[RxCounter6++]=temp6;}【else{Uart6_Buffer[RxCounter6++]=USART_ReceiveData(USART6);if(RxCounter6==FRAMELEN) /*FRAMELEN*/{Flag6=1;RxCounter6=0;}if(USART_GetFlagStatus(USART6,USART_FLAG_ORE) == SET) {!USART_ClearFlag(USART6,USART_FLAG_ORE);USART_ReceiveData(USART6);}}}}int main(void){!int i=0;int j=0;GPIO_Configuration();USART_Configuration();NVIC_Config();while (1){} }。
基于STM32F407的双CAN总线设计与实现

基于STM32F407的双CAN总线设计与实现【摘要】本文是基于意法半导体(ST)新推出的一款高性能CortexTM-M4内核的ARM 芯片STM32F407ZGT6,进行的双CAN总线设计。
在开发过程中采用了ST提供的可视化图形界面开发工具STM32Cube进行底层驱动的配置,简化了设计工作。
但由于该工具链接的固件库函数存在传递参数错误,使得CAN总线无法接收数据,本文对该库函数进行了更正。
【关键词】STM32F407;CAN;STM32CubeDesign and Realization of Double CAN Buses onSTM32F407LIU Peng(Chinese Electron Scientific and Technological Company 20th Institute,Xi’an Shaanxi 710068,China)【Abstract】Based on a high-performance ARM with CortexTM-M4 core which launched by STMicroelectronics (ST)--STM32F407ZGT6,the double CAN bus is designed in this paper. A visual graphical interface-STM32cube which is provided by ST,is used to configure the underlying driver in this development process. It simplifies the design work. However,one of its library functions makes the CAN bus does not work,because of its error in transferring parameter. This paper makes some changes to this function.【Key words】STM32F407;CAN;STM32Cube0 前言CAN 是一种多主机局域网,它是由博世公司为现代汽车应用率先推出的,凭借着良好的可靠性以及卓越的灵活性,已被广泛应用于工业自动化领域、建筑、环境控制等众多领域[1]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、引言
STM32F407 是意法半导体推出的一款高性能单片机芯片,具有丰富的外设资源,尤其是串口模块。
串口通信是单片机与外部设备进行数据交互的重要手段,而 STM32F407 的串口收发函数则是实现串口通信的关键部分。
二、串口收发函数的基本原理
1. 串口概述
串口又称为异步收发器,是微处理器与外围设备进行数据传输的一种通信方式。
在 STM32F407 中,串口通信分为串口发送和串口接收两部分。
串口发送函数用于将数据发送到外部设备,串口接收函数则用于接收外部设备发送过来的数据。
2. 串口收发函数的使用
在 STM32F407 中,串口收发函数的使用需要通过配置相关的寄存器和参数来实现。
首先需要初始化串口通信参数(如波特率、数据位数、停止位数等),然后通过调用相应的串口发送函数和串口接收函数来实现数据的发送和接收。
三、STM32F407 串口收发函数的具体实现
1. 串口初始化函数
在使用 STM32F407 的串口收发函数前,首先需要进行串口的初始化配置。
该配置包括设置波特率、数据位数、停止位数、校验位等参
数,具体实现如下:
```c
void USART_Init(USART_TypeDef* USARTx, uint32_t baud_rate, uint32_t data_bits, uint32_t stop_bits, uint32_t parity)
{
// 设置波特率
USARTx->BRR = SystemCoreClock / baud_rate;
// 设置数据位数、停止位数、校验位
// ...
// 启用串口
USARTx->CR1 |= USART_CR1_UE;
}
```
2. 串口发送函数
串口发送函数用于将数据发送到外部设备,具体实现如下:
```c
void USART_SendData(USART_TypeDef* USARTx, uint8_t data) {
// 等待发送缓冲区为空
while ((USARTx->SR USART_SR_TXE) == 0);
// 将数据发送到发送缓冲区
USARTx->DR = data;
}
```
3. 串口接收函数
串口接收函数用于接收外部设备发送过来的数据,具体实现如下: ```c
uint8_t USART_ReceiveData(USART_TypeDef* USARTx)
{
// 等待接收缓冲区非空
while ((USARTx->SR USART_SR_RXNE) == 0);
// 返回接收到的数据
return USARTx->DR;
}
```
四、串口收发函数的应用示例
下面通过一个简单的示例来演示如何在 STM32F407 中使用串口收发函数进行数据通信。
1. 硬件连接
将 STM32F407 开发板的串口引脚连接至外部设备的串口引脚,确保连接正确无误。
2. 代码实现
```c
int main()
{
// 初始化串口
USART_Init(USART1, 9600, 8, 1, USART_PARITY_NONE);
// 发送数据
USART_SendData(USART1, 'H');
USART_SendData(USART1, 'e');
USART_SendData(USART1, 'l');
USART_SendData(USART1, 'l');
USART_SendData(USART1, 'o');
USART_SendData(USART1, '\n');
// 接收数据
uint8_t data;
data = USART_ReceiveData(USART1);
// 处理接收到的数据
while (1);
}
```
3. 数据通信
通过以上代码实现,STM32F407 会向外部设备发送字符 'Hello',并且接收外部设备发送过来的数据。
五、总结
STM32F407 的串口收发函数是实现串口通信的重要组成部分,通过正确的使用和配置,可以实现与外部设备的稳定、高效的数据交互。
希望本文对读者在使用 STM32F407 的串口收发函数方面有所帮助。
六、参考资料
[1] STM32F407xx Reference Manual
[2] STM32CubeMX User Manual
以上是关于 STM32F407 串口收发函数的一些基本介绍和实现方法,希望能够对读者有所帮助。