AGV智能小车循迹系统的建模与仿真
AGV系统结构设计以及动力学建模型

2.AGV系统结构设计以及动力学建模型内容提要:设计了一辆前后轮分独立驱动的小车,后轮用步进电机驱动,实现动力源,前轮由私服电机驱动,实现转向。
并建立其动力学方程。
2.1 AGV系统结构设置所设计的AGV小车的模型如图2.1所示。
小车采用前后轮独立驱动的模式,后轮由电机带动齿轮传动,给与合适的动力源。
前轮有电机带动直推轴焊接横轴来实现转向。
四轮结构与三轮结构相比有较大的负载能力和平稳性。
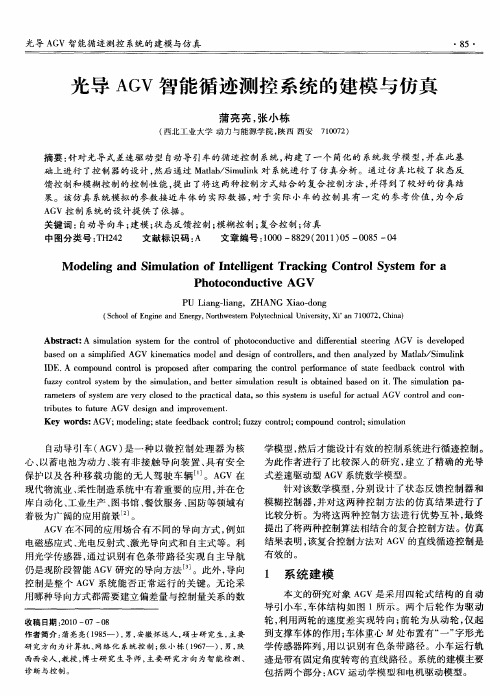
1.蓄电池组2. 伺服交流电动机3. 激光扫描仪4. 车载控制器5. 无线通讯装置6. 伺服交流电动机7. 减速器8. 驱动车轮图2.1 AGV小车的模型图由于采用了两轮独立驱动差速转动的方式,因此两个驱动车轮的速度的同步性成,成为车辆稳定运行的一个重要指标。
鉴于此,齿轮减速结构与车轮通过柔性连轴器来连接。
2.2 AGV小车的动力学建模自从 A G V问世以来,人们在自动导引车的控制过程中一般满足于基于运动学的控制模型,而很少有人进行基于动力学的控制设计等方面的内容。
事实表明,根据AGV车体动力学模型,可以得到直接的电机输入与行走、导向车轮转速的非线性的耦合关系,将对指导车体机械结构设计、路径规划以及合理的路径跟踪控制规律设计有重要而且深远的意义。
由于 A G V在实际问题中有较严格地面要求的环境中运动,车速较低,限定了加速度的问题,而不会发生明显的车体“上跳”运动的现象出现,故可以在二维空间来研究其动力学模型。
现以我以后轮为电机带动齿轮来实现动力驱动的方式传达力矩,前轮则为由电机直接带动轴的转动从而达到转动的方式来实现转向的AGV为例建立动力学模型。
AGV由车体、蓄电池和充电系统、驱动装置、转向装置、精确停车装置、车上控制器、通信装置、信息采样子系统、超声探障保护子系统、移载装置和车体方位计算子系统等等组成。
“智能”较高的AGV都有车上控制器,它类似于机器人控制器,用以对AGV进行监控。
控制器计算机通过通信系统从地面站接受指令并报告自己的状态。
《2024年自循迹智能小车控制系统的设计与实现》范文

《自循迹智能小车控制系统的设计与实现》篇一一、引言随着人工智能与自动控制技术的快速发展,智能小车已经广泛应用于各种领域,如物流配送、环境监测、智能家居等。
本文将详细介绍一种自循迹智能小车控制系统的设计与实现过程,该系统能够根据预设路径实现自主循迹、避障及精确控制。
二、系统设计(一)系统概述自循迹智能小车控制系统主要由控制系统硬件、传感器模块、电机驱动模块等组成。
其中,控制系统硬件采用高性能单片机或微处理器作为主控芯片,实现对小车的控制。
传感器模块包括超声波测距传感器、红外线测距传感器等,用于感知周围环境并实时传输数据给主控芯片。
电机驱动模块负责驱动小车行驶。
(二)硬件设计1. 主控芯片:采用高性能单片机或微处理器,具备高精度计算能力、实时响应和良好的可扩展性。
2. 传感器模块:包括超声波测距传感器和红外线测距传感器。
超声波测距传感器用于测量小车与障碍物之间的距离,红外线测距传感器用于检测小车行驶路径上的标志线。
3. 电机驱动模块:采用直流电机和电机驱动器,实现对小车的精确控制。
4. 电源模块:为整个系统提供稳定的电源供应。
(三)软件设计1. 控制系统软件采用模块化设计,包括主控程序、传感器数据处理程序、电机控制程序等。
2. 主控程序负责整个系统的协调与控制,根据传感器数据实时调整小车的行驶状态。
3. 传感器数据处理程序负责对传感器数据进行处理和分析,包括距离测量、方向判断等。
4. 电机控制程序根据主控程序的指令,控制电机的运转,实现小车的精确控制。
(四)系统实现根据设计需求,通过电路设计与焊接、传感器模块的安装与调试、电机驱动模块的安装与调试等步骤,完成自循迹智能小车控制系统的硬件实现。
在软件方面,编写各模块的程序代码,并进行调试与优化,确保系统能够正常运行并实现预期功能。
三、系统功能实现及测试(一)自循迹功能实现自循迹功能通过红外线测距传感器实现。
当小车行驶时,红外线测距传感器不断检测地面上的标志线,并根据检测结果调整小车的行驶方向,使小车始终沿着预设路径行驶。
智能循迹小车设计与实现

智能循迹小车设计与实现摘要:智能循迹小车是一种能够根据预设的路径自动行驶的装置。
本文主要介绍了智能循迹小车的设计与实现过程,包括硬件设计、软件编程以及测试和优化等内容。
通过使用光电传感器和电机驱动模块,实现了小车的自动行驶功能。
实验结果表明,智能循迹小车能够准确地沿着指定的路径行驶。
关键词:智能循迹小车,光电传感器,电机驱动模块1.引言智能循迹小车是一种基于传感器和控制模块的自动驾驶装置。
它能够通过感知周围环境并根据预先设定的路径进行行驶。
智能循迹小车在工业生产、仓储管理和物流配送等领域具有广泛的应用前景。
本文主要介绍了智能循迹小车的设计与实现过程。
2.硬件设计主控模块采用单片机作为核心处理器,并配备了存储器、通信接口和控制信号输出等功能。
传感器模块主要由光电传感器组成,用于感知小车当前位置和行驶方向。
执行器模块由电机驱动模块组成,用于控制小车的移动。
3.软件编程传感器数据采集模块负责读取光电传感器的输出信号,并进行信号处理和滤波。
路径规划模块通过分析传感器数据,确定小车当前位置和行驶方向,并根据预设的路径规划算法,确定下一步行驶方向。
运动控制模块通过调节电机驱动模块的输入信号,控制小车的运动。
4.测试与优化为了验证智能循迹小车的性能,我们进行了一系列的测试和优化。
首先,我们对传感器进行了校准,以确保其输出信号的准确性。
然后,我们在实际场景中对小车进行了测试,包括行驶精度、速度和稳定性等方面的测试。
根据测试结果,我们对软件进行了调优,并对硬件进行了优化,以提高智能循迹小车的性能。
5.结论本文介绍了智能循迹小车的设计与实现过程。
通过使用光电传感器和电机驱动模块,我们实现了小车的自动行驶功能。
实验表明,智能循迹小车能够准确地沿着指定的路径行驶。
未来,我们将进一步改进小车的设计和算法,以提高其性能和适应性。
AGV智能小车循迹系统的建模与仿真.pptx

EdM D EdO
•
EdO (vl vr ) / 2
•
v / L
4 如何建立电机驱动模型?
目标:寻找输入电压与车轮速度(vlv
直流电机动态过程的微分方程如下:
r)之间的关系。
••
•
m e n m n n Kc U a K f Tc
此时忽略车体质量、摩擦阻力对车速的影响,则电机的理想空载转速=车轮转速。 理想空载表示负载转矩为零。则:
在分析小车处于转弯状态时的速度时不能 将小车当做质点,那么应该研究哪一点的速度?
位移=速度*时间,但M点的速度并不好直 接表示,因此考虑用位移之间的数量关系来表
示 EdM 。
EdM D sin EdO
目标:需要寻找
关系。
、EdO 与速度之间的
与电机直、接E控dO制均的与速O度点速vl度、vvor相相关关。,且 vo
t
0
dt
0
vo / R (vl vr ) / 2R R L(vl vr ) / 2(vr vl )
•
v / L
3 如何建立运动学模型?
t
t
EdO X 0 0 vOxdt X 0 0 vO sindt
•
EdO vO sin (vl vr ) sin / 2
由于 很小,则 sin
选择状态变量x1=△v,x2=θ,x3=Edm, 并令输入u=△U,输出y=Edm。可以得 到系统的状态矩阵如下
•
v
1
v
k
U
m
m
•
v / L
•
E dm
D
v
vc
L
1/ m 0
A
1/ L
光导AGV智能循迹测控系统的建模与仿真
果 。该仿 真 系统模 拟的参 数接 近 车体 的 实际数 据 , 于 实际 小 车 的控 制具 有 一 定 的参 考 价 值 , 对 为今 后
A V 控 制 系统 的设 计 提 供 了依 据 。 G
关 键词 : 自动 导 向车 ; 建模 ; 态反馈 控制 ; 状 模糊 控制 ; 复合 控制 ; 真 仿 中图分 类号 :H 4 T 22 文 献标识 码 : A 文章编 号 :0 0— 8 9 2 1 ) 5— 0 5— 4 10 8 2 (0 1 0 0 8 0
r m ees o y tm r e y co e o t e p a tc 1d t . O t i y tm Su eu o cu 1AGV o to n o — a tr fs se a e v r l s d t h r cia a a S h ss se i s f lf ra t a c n r la d c n ti u e o f t r rb t st u u e AGV e in a d i d sg n mprv me t o e n. K e o ds AGV; d l g sae  ̄e b c o to ; u z o to ; o p un o to ; i u ain yw r : mo ei ; tt n d a k c n r l f z y c n r l c m o d c nr l sm lto
仓储AGV机械系统设计与仿真

仓储AGV机械系统设计与仿真一、引言仓储AGV机械系统是现代物流仓储行业的重要设备之一,通过自动导航、载货和搬运等功能实现了物品的自动化运输和分拣。
本文将介绍仓储AGV机械系统的设计与仿真,包括结构设计、动力系统设计、导航系统设计和搬运系统设计等方面。
二、结构设计1.底盘设计:底盘是AGV机器人的基础结构,需要具备一定的强度和稳定性。
底盘的设计应考虑载货能力、行驶平稳性和通过性等因素。
2.轮组设计:轮组是AGV机器人的行走部件,需要具备良好的操控性、抗颠簸性和通过性能。
轮组的设计应考虑轮子尺寸、轮子材料和轮子布置等因素。
3.载货架设计:载货架是AGV机器人搬运货物的部件,需要具备稳定性和可靠性。
载货架的设计应考虑货物尺寸、重量和承载能力等因素。
三、动力系统设计2.驱动系统设计:驱动系统是AGV机器人的动力传输装置,常见的驱动系统包括电机和传动装置等。
驱动系统的设计应考虑机器人的行驶速度、加速度和可操控性等因素。
3.制动系统设计:制动系统是AGV机器人的安全保护装置,需要确保机器人能够在紧急情况下及时停止。
制动系统的设计应考虑制动力大小和制动距离等因素。
四、导航系统设计1.感知系统设计:感知系统是AGV机器人的视觉和感知装置,用于检测周围环境和导航定位。
感知系统的设计应考虑视觉传感器、激光雷达和超声波传感器等因素。
2.定位系统设计:定位系统是AGV机器人的定位和导航装置,用于确定机器人的位置和航向。
定位系统的设计应考虑全球定位系统(GPS)、惯性导航系统(INS)和地标识别等因素。
3.控制系统设计:控制系统是AGV机器人的中枢控制装置,用于控制机器人的运动和动作。
控制系统的设计应考虑控制算法、传感器数据处理和通信系统等因素。
五、搬运系统设计1.夹爪设计:夹爪是AGV机器人搬运货物的装置,需要具备可靠的抓取和放置功能。
夹爪的设计应考虑货物类型、重量和形状等因素。
2.配送系统设计:配送系统是AGV机器人的货物分拣和配送装置,需要满足不同货物的搬运需求。
AGV智能小车循迹系统的建模与仿真课件
EdM D EdO
•
EdO (vl vr ) U / 2,Ur Uc U / 2 相应的电机
输出速度为:
V (s) /U (s) k /( ms 1)
vl vc v / 2, vr vc v / 2, vr vl v, vr vl 2vc
由于 很小,则 sin
于是最终运动学模型如下:
EdM D EdO
•
EdO (vl vr ) / 2
•
v / L
精选课件
11
4 如何建立电机驱动模型?
目标:寻找输入电压与车轮速度(vlv
直流电机动态过程的微分方程如下:
r)之间的关系。
••
•
m e n m n n Kc U a K f Tc
1
AGV智能小车简 述
精选课件
1
目录
1
简述
2
数学建模
3
Simulink建模与仿真
4
控制系统设计
精选课件
2
AGV智能小车简述
AGV(Automatic Guided Vehicle)智能小车又称自动导引车,是一种 在计算机监控下,根据具体规划和作业要求完成取货、送货、充电等任务 的无人驾驶自动化车辆。
设计状态反馈阵时,要使系 精选课件
19
3.状态反馈控制器设计
在MATLAB的控制系统工具箱 中提供了单变量系统极点配置
acker(),其格式为
K=acker(A,B,p)
程序如下:
A0;=];[-0.1 0 0;10/3 0 0;5/3 -3/4
B=[7:0:0];
C=[0:0:1];
D=0;
Rc=rank(ctrb(A,B));
AGV智能小车循迹系统的建模与仿真PPT30页
21、要知道对好事的称颂过于夸大,也会招来人们的反感轻蔑和嫉妒。——培根 22、业精于勤,荒于嬉;行成于思,毁于随。——韩愈
23、一切节省,归根到底都归结为时间的节省。——马克思 24、意志命运往往背道而Βιβλιοθήκη ,决心到最后会全部推倒。——莎士比亚
AGV智能小车循迹系统的建模与仿真
21、没有人陪你走一辈子,所以你要 适应孤 独,没 有人会 帮你一 辈子, 所以你 要奋斗 一生。 22、当眼泪流尽的时候,留下的应该 是坚强 。 23、要改变命运,首先改变自己。
24、勇气很有理由被当作人类德性之 首,因 为这种 德性保 证了所 有其余 的德性 。--温 斯顿. 丘吉尔 。 25、梯子的梯阶从来不是用来搁脚的 ,它只 是让人 们的脚 放上一 段时间 ,以便 让别一 只脚能 够再往 上登。
25、学习是劳动,是充满思想的劳动。——乌申斯基
谢谢!
智能循迹小车设计与训练
智能循迹小车设计与训练智能循迹小车是一种集机械、电子、计算机等多种技术于一身的智能设备,它能够根据预设的轨迹路径自主行驶,具备避障、自动导航等功能。
设计与训练智能循迹小车需要综合运用多种技术,包括传感器技术、机器学习算法等,以实现小车的自主导航能力。
智能循迹小车需要搭载各种类型的传感器,如红外线传感器、超声波传感器等,以实时感知周围环境信息。
通过这些传感器,小车能够检测到前方是否有障碍物,并根据传感器所接收到的信号进行判断和决策。
例如,当红外线传感器检测到前方有障碍物时,小车会及时采取避障动作,避免与障碍物发生碰撞。
智能循迹小车还需要具备学习能力,能够通过训练来识别不同的轨迹路径。
在训练过程中,我们可以将小车放置在预设的轨迹路径上,并通过传感器获取到对应的环境信息。
随后,将这些信息输入到机器学习算法中进行训练,以让小车学习到正确的轨迹路径。
通过反复训练,小车能够逐渐掌握识别轨迹路径的能力,并能够在实际应用中进行准确的导航。
在训练过程中,我们还可以引入强化学习算法,以进一步提升小车的导航能力。
通过设置奖励机制,可以使小车在训练过程中逐步优化行为策略,以达到最优导航效果。
例如,我们可以给予小车在正确的轨迹路径上行驶时正向奖励,而在偏离轨迹路径时给予负向奖励。
通过不断调整奖励机制,小车能够逐渐学会选择最优的行驶路径,并能够在复杂环境中完成高效的导航任务。
除了基本的循迹导航功能,智能循迹小车还可以进一步拓展其他应用场景。
例如,可以通过增加摄像头模块,使小车能够实现视觉识别功能,进而实现对特定物体的识别和跟踪。
同时,小车还可以配备声音传感器,实现对声音信号的感知和识别,从而能够与用户进行语音交互。
这样的应用场景使得智能循迹小车具备更加广泛的实用性,能够应用于智能家居、物流配送等领域。
智能循迹小车的设计与训练需要综合运用传感器技术、机器学习算法等多种技术,以实现小车的自主导航能力。
通过训练和优化,小车能够学习到正确的轨迹路径,并能够在实际应用中完成准确的导航任务。
agv小车的二维建模
agv小车的二维建模
AGV系统进行路径跟踪控制的基础是其具有稳定的运动控制输出,从而使得系统能够按照规划轨迹运行,通常直接控制量和输出控制量之间存在一种固定的控制量关系,这种输出控制量和直接控制量之间的关系,我们称之为运动学模型。
在这里我们将分别就三种比较常见的AGV底盘建立它们的运动学模型和轮式里程计模型。
如下图所示,为差速模型底盘的车体模型示意图,车体坐标系的原点假设为M 点,在左右轮轴的中心上。
我们需要解决的问题是如
何将驱动轮左轮速度和右轮速度转换为车体坐标系M下线速度 ,
和角速度,也就是正运动学问题,同理逆运动学问题就是将车体坐
标系M 下的线速度 , 和角速度转换为驱动轮左轮速度和右轮速度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
EdM D EdO
•
EdO (vl vr ) / 2
•
v / L
4 如何建立电机驱动模型?
目标:寻找输入电压与车轮速度(vlv
直流电机动态过程的微分方程如下:
r)之间的关系。
••
•
m e n m n n Kc U a K f Tc
此时忽略车体质量、摩擦阻空载表示负载转矩为零。则:
t
0
dt
0
vo / R (vl vr ) / 2R R L(vl vr ) / 2(vr vl )
•
v / L
3 如何建立运动学模型?
t
t
EdO X 0 0 vOxdt X 0 0 vO sindt
•
EdO vO sin (vl vr ) sin / 2
由于 很小,则 sin
在分析小车处于转弯状态时的速度时不能 将小车当做质点,那么应该研究哪一点的速度?
位移=速度*时间,但M点的速度并不好直 接表示,因此考虑用位移之间的数量关系来表
示 EdM 。
EdM D sin EdO
目标:需要寻找
关系。
、EdO 与速度之间的
与电机直、接E控dO制均的与速O度点速vl度、vvor相相关关。,且 vo
•
v / L
即 Ul Uc U / 2,Ur Uc U / 2 相应的电机
输出速度为:
V (s) /U (s) k /( ms 1)
vl vc v / 2, vr vc v / 2, vr vl v, vr vl 2vc
此模型是一个非线性系统,但由于小车是在确定路线上 运行的,它的纠偏过程可视为在给定信号基础上增加一个微 小的控制量,因而这样一个非线性化系统就可以采用小偏差 线性化的方法将其转化为线性系统。于是有
m 10; k 70; L 0.3;
▪ 代D入方0.程5;得vc: 0.75;
1/10 A 10 / 3
5 / 3
0
0 3
4
0 0,
0
B
7 0, 0
C 0 0 1
rank[B,AB,A2B]=3 说明系统可控
3.状态反馈控制器设计
▪ 状态反馈u=v-Kx,K=[k1,k2,k3]
AGV智能小车简述
AGV智能小车是一种以电池为动力,装有电磁导引设备或光学导引设 备,能够自动沿着预定轨道行驶的自动化车辆。
应用 AGV 小车具有以下优势: (1)可以减少捡取货物、搬运货物的劳动力,提高劳动效率。 (2)搬运货物时,小车自身不易与周边加工设备发生碰撞,降低了生 产事故的发生率。 (3)能够与机器人、堆垛机等自动化设备完美配合作业,且能够实现 对货物的实时跟踪,大大减少货物丢失的发生率。 (4)耗电量小,无噪声污染。
▪ 自动引导小车的控制规律可以表示为:
△U=v-(k1△v+k2θ+k3Edm)
状态反馈矩阵K的引入,并不增加系统的维 数,但是可以通过K的自由选取改变闭环系 统的特征值,从而使系统获得所要求得性能 。
n(s) /U (s) Kc /( m es2 ms 1)
对于直流伺服电机, e m , v n 2r, k Kc 2r
最终的电机驱动模型如下
V (s) /U (s) k /( ms 1)
5 如何整合模型?
经过问题3和4的解答,分别得到了运动学模型和电机驱动模型,但由于中间变量速度没有统
机电一体化产品的组成:机械本体,传 感器,控制系统,驱动器。
此次建模分为两部分:建立运动学模型和 建立电机驱动模型。
电机驱动模型要得到的是输入电压与速度 (转速)之间的关系。
运动学模型要得到的是速度与 EdM (位
移)之间的关系。 最后将两个模型整合形成最终的数学模型。
3 如何建立运动学模型?
目标:寻找 EdM 与速度之间的关系。
一,仍不能直接将其组合在一起。
为了简化推导过程,以匀速直线运动为例。在没有外部 扰动的情况下,左右电机的给定信号相等,
即 Ul U r Uc ,在此作用下小车产生速度 vc可
视为常数。当外部扰动使小车偏离预定路径时,给定信号将
分别加减一个纠偏控制量 U / 2 ,
EdM D EdO
•
EdO (vl vr ) / 2
数学建模
王嘉津
问题
▪ 该系统的输入和输出是什么? ▪ 系统建模的思路? ▪ 如何建立运动学模型? ▪ 如何建立电机驱动模型? ▪ 如何整合模型?
1 输入和输出是什么?
针对对系统的哪一部分建模?
EdM
1 该系统的输入和输出是什么?
仿真的目的:找到合适的控制器,使小车 及时修正偏差,达到较好的循迹性能。
选择状态变量x1=△v,x2=θ,x3=Edm, 并令输入u=△U,输出y=Edm。可以得 到系统的状态矩阵如下
•
v
1
v
k
U
m
m
•
v / L
•
E dm
D
v
vc
L
1/ m 0
A
1/ L
0
D / L vc
C 0 0 1
0 k / m
0 ,
B
0
,
0 0
2.系统可控性分析
▪ 将小车与电机的相关参数
V (s) / U (s) k /( ms 1)
5 如何整合模型?
此时得到最终数学模型如下:
V (s) / U (s) k /( ms 1) EdM D EdO
•
EdO vc
•
v / L
U 如何得到?
SIMULINK建模与仿真
周博文
1 .状态传递函数
根据前面同学建立的系统模 型整理,可以得出系统状态 矩微分方程。
AGV智能小车循迹系统的 建模与仿真
汇报人: 田佳豪 王嘉津 周博文 邹星星
1
AGV智能小车简 述
目 录1
2
3
4
简述 数学建模 Simulink建模与仿真 控制系统设计
AGV智能小车简述
AGV(Automatic Guided Vehicle)智能小车又称自动导引车,是一种 在计算机监控下,根据具体规划和作业要求完成取货、送货、充电等任务 的无人驾驶自动化车辆。
那么只需要观测小车运行中偏差量变化的 状态,便可评估控制器的优劣。
因此输出量应选择为能反映小车偏离轨道 程度的变量。
输出量: EdM
当小车修正偏差进行转弯时,是通过后轮 (驱动轮)的转速差实现的,决定后轮转速的 是电机的电枢电压。
输入量:电枢电压
建模的实质:反映输入电压与 EdM 之间
的关系。
2 系统建模的思路?