新一代汽车软件和整车电子架构
ECU逐步消亡,“域”向何方?
ECU逐步消亡,“域”向何方?在软件定义汽车的热潮之下与电子电气架构演进的过程中,域控制器是实现整车智能化网联化的核心载体。
各功能性ECU如何逐步被域控取代,真的会被消亡吗?域控制器的出现,整车产业链条中的各个供应商关系与利益将得到重新构建,传统供应商面临的挑战与机遇路在何方,本文结合国内新能源汽车的发展现状及趋势来一一解读。
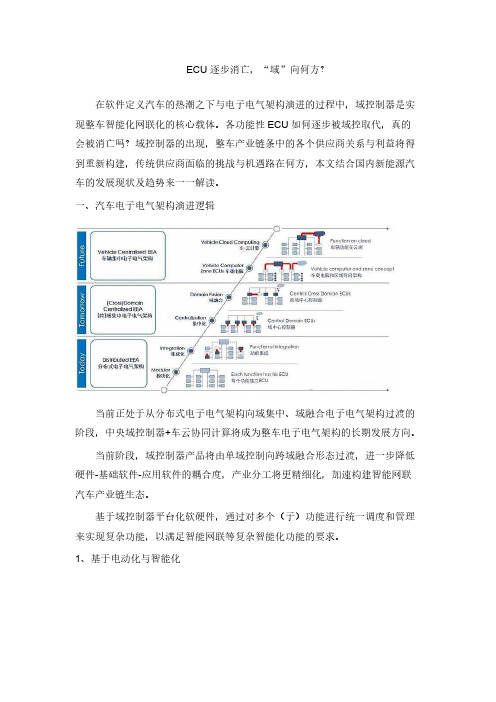
一、汽车电子电气架构演进逻辑当前正处于从分布式电子电气架构向域集中、域融合电子电气架构过渡的阶段,中央域控制器+车云协同计算将成为整车电子电气架构的长期发展方向。
当前阶段,域控制器产品将由单域控制向跨域融合形态过渡,进一步降低硬件-基础软件-应用软件的耦合度,产业分工将更精细化,加速构建智能网联汽车产业链生态。
基于域控制器平台化软硬件,通过对多个(子)功能进行统一调度和管理来实现复杂功能,以满足智能网联等复杂智能化功能的要求。
1、基于电动化与智能化继工业革命以来,每次技术上的发明及革命性创新,换一个角度来看,其实是人类发展赖以生存、智慧结晶的一种考验和体现,也是由量变到质量、整个系统生态链互相促进,甚至倒逼的一个过程。
新能源汽车电动化及智能化也一样,就像当年PC机的发展、手机从功能机到智能机时代,再到自动驾驶智能汽车。
从最基础的操作系统-全栈解耦的基础软件及中间件-越来越标准化的API-丰富的应用层软件-5G技术-物联网-云平台-云计算-高精地图-车路协同等等组合因素,真正的智能汽车,它就是一个万物互相的载体、一个有脑有手有脚的智能移动空间、一个更强大的母生态系统。
这个是为什么这么多资本大力布局各大域控的真正原因,它里面的商业价值想像空间太大。
2、基于集成电路的发展当年手机的功能机向智能机时代的发展,很大成度也是基于“摩尔定律”观点和规律,就像当年刚出PC机时代一样,当时没人想到过做成一个电子书概念吗?我想肯定会有,只是按当时的硬件集成条件做出来实用吗?答案肯定是不实用的,所以说智能硬件的快速发展空间都得益于三次工业革命之后的电子计算机以及集成电路的飞速发展,包括汽车智能化方面也受益于目前集成电路的设计能力和制程工艺,也就出现不同功能特性的MCU、CPU、NPU、DPU、GPU、SoC等芯片,来满足智能汽车所需功能安全和算力特性方面的不同要求。
汽车电子电气架构设计及优化措施
汽车电子电气架构设计及优化措施随着科技的飞速发展,汽车电子电气系统在汽车中扮演着越来越重要的角色。
汽车电子电气系统不仅涉及到车辆动力、操控和舒适性,更关乎着汽车的智能化、网络化和安全性。
汽车电子电气架构的设计及优化成为了汽车制造商和电子系统供应商需要重点关注的问题。
一、汽车电子电气架构设计1. 传统的汽车电子电气架构传统的汽车电子电气架构主要由独立的控制单元(ECU)组成,各个功能模块独立运行,通信方式多采用CAN总线或LIN总线进行信息交互。
这种结构存在着电缆过多、通信速度慢、维护复杂等问题,难以适应汽车电子系统日益增长的需求。
2. 现代汽车电子电气架构现代汽车电子电气架构逐渐向集成化和分布化方向发展。
通过统一的总线结构和更高效的网络通信方式,将原本独立运行的ECU整合成少量的大型控制单元或者分布式电子系统,以实现信息共享和相互协作。
在整车级别上,通过CAN-FD、FlexRay、Ethernet等高速总线技术,提高车载电子系统的通信速率和数据带宽,满足更复杂的数据传输需求。
3. 汽车电子电气架构的设计原则在进行汽车电子电气架构设计时,需要考虑以下几个原则:- 简化结构:将原本分散的功能模块进行整合,减少电缆数量和系统成本;- 数据共享:通过统一的信息交换总线,实现各个控制单元之间的数据共享和协作,提高整车系统的集成度和性能;- 灵活性:架构要具备一定的扩展性和适应性,能够满足不同车型和功能需求的变化;- 可靠性:确保电子电气系统具备高度的稳定性和可靠性,以满足汽车行驶安全的要求。
1. 单片集成技术单片集成技术是通过将多个功能模块或传感器整合到一个芯片上,以减少成本、空间和功耗。
采用单片集成技术可以有效减少汽车电子系统的体积和数量,简化电缆连接,降低整车电子电气系统的复杂度。
2. AUTOSAR标准应用AUTOSAR(Automotive Open System Architecture)是一种用于汽车电子电气系统开发的标准体系架构。
整车电子电气架构EEA--简述

整车电子电器架构—简述汽车智能化、电子化程度的不断提高,这是大背景,这个大家肯定没异议。
毕竟客户爸爸们现在很喜欢,未来会更喜欢。
这时候来了三批工程师要搞定这个事,他们首先要解决的就是怎么把车上这么多电子设备连接起来,这个设计过程就是电子电器架构所谓「电子电气架构」,简单地说就是把汽车里的传感器、中央处理器、电子电气分配系统、软件硬件通过技术手段整合在一起。
通过这种架构,可以将动力总成、驱动信息以及娱乐信息等,转化为实际的电源分配的物理布局、信号网络、数据网络、诊断、容错、能量管理等电子电气解决方案。
通俗来说,汽车是一个软硬件结合的产物,如果把它比作是一个人,「四个轮子+一个沙发」是身体,电子电气架构就相当于神经系统,负责完成各个部位的连接,统领整个身体的运作,实现特定功能。
首先是一群抱着“机械定义汽车”思维的传统车企工程师开始动作了。
增加电子控制单元(ECU)、增加传感器、增加仪表。
要连接了咋么办。
哪两个东西之间有需求,就加根线呗。
传统的车上电气系统,大多采用点对点的单一通信方式,相互之间很少有联系但随着系统变复杂情况不对了,布线系统变得异常庞大, 一辆传统连接的汽车中,导线总长度可以达到2000多米,电气节点可以达到1500多个。
导致线束材料成本剧增,可靠性骤减。
系统不可持续了。
又来了一群抱着“硬件定义汽车”思维的车企工程师开始寻思了,计算机硬件里不是有总线嘛,能不能借鉴下,大家都先连在几根粗线上。
总线技术可以简单理解为高速公路,路上所有的车(信息)都走一段高速,降低道路(线束)成本。
为简化线路连接,提高可靠性、利于各装置之间的数据共享,以汽车分布式控制系统为基础的车载网络总线技术发展起来了。
汽车总线技术的优点是在统一应用层协议和数据定义的基础上,可以使之成为一个“开放式系统”,具有很强的灵活性。
对于任何遵循上述协议的供应商所生产的控制单元都可轻易添加入该网络系统中或者从网络系统中拆除,几乎不需要做任何硬件和软件的修改,这完全符合现代汽车平台式设计的理念。
汽车电子电气架构的“前世、今生和未来”(一)
高惠民(本刊编委会委员)曾任江苏省常州外汽丰田汽车销售服务有限公司技术总监,江苏技术师范学院、常州机电职业技术学院汽车工程运用系专家委员,高级技师。
文/江苏 高惠民汽车电子电气架构的“前世、今生和未来”(一)随着汽车“新四化”—电动化、智能化、网联化、共享化的发展,汽车电子化程度大幅提高,甚至不断向车外延伸,给汽车电子电气架构 (Electrical and Electronic Architecture,EEA)的发展带来了前所未有的挑战。
汽车正逐渐从传统的代步工具演变为集人、车、环境于一体的移动终端、储能单元和数字空间,为用户提供持续快速的功能升级和定制化服务,这也将逐渐成为汽车品牌间差异的重要体现。
因此,面向自动驾驶和网联化应用的下一代汽车,对由计算处理、数据存储、通信交互等组成的系统的架构性能提出了更高的要求。
传统分布式EEA采用单一功能控制器的设计思路,来自不同供应商的电子控制单元 (Electronic Control Unit,ECU)的算力不能协同,从而产生冗余,软硬件高度耦合,难以统一进行维护和实现空中下载 (Over The Air,OTA)。
同时,ECU数量的爆发式增长使通信复杂度大幅提升,也导致线束成本和整车质量增加。
因此,这种架构逐渐难以适应汽车“新四化”的需求。
未来,汽车EEA 的变革性发展势在必行。
基于软件集中化和域控制器的集中式电子电气架构将成为未来汽车电子电气架构(EEA)的发展方向。
一、汽车EEA定义架构的概念最早源于建筑行业,建筑师设计一栋建筑需根据业主的需求和边界条件从不同的角度考虑设计出所需的设计图。
设计图抽象地描述了建筑的某一个特定的方面(如几何关系和电气连接)。
根据这些所需的设计图便可以建造一栋建筑。
后来电气与电子工程协会制定的IEEE 1471-2000 《软件密集型系统体系结构描述推荐规程》 标准中第3.5条款义释了“架构”一词分析:“架构”是用来描述物理功能和信息功能之间的关联以及形式元素之间的分配。
汽车域控制器行业发展介绍

汽车域控制器行业发展介绍整车电子电气功能升级,ECU数量不断提升。
随着汽车智能化、网联化的渗透与普及,汽车功能配置日益复杂,汽车电子电气零部件占汽车的比重逐渐提高,对传感器、电子控制器(Electronic Control Unit,ECU)的需求数量大幅增加,如副驾驶娱乐屏幕、HUD抬头显示系统,自动驾驶摄像头、毫米波雷达,ECM模块(控制发动机)、BMS模块(管理新能源汽车电池)、AVM模块(360度环视影像融合计算)等。
同时,电动车时代下“电机+电控+电池”三电系统颠覆原有燃油动力源,电气信号逐步替代机械传动成为车内主要信息传导媒介,为以芯片、电路为基础的控制系统进行全车功能掌控打下扎实基础。
一、发展背景随着汽车电子渗透率持续提升,在传统分布式电子电气架构(Electrical/Electronic Architecture,EEA)下,一辆普通汽车的ECU高达70个,代码量近亿行。
不同ECU之间主要采用CAN/LIN总线进行连接,近年汽车中CAN/LIN总线节点数目不断提升,LIN和CAN总线节点的CAGR分别约为17%、13%。
此外,传统分布式EEA架构与汽车软件、硬件存在强耦合关系,导致车企开发成本及难度不断提升。
在此背景下,集中式电子电气架构、集中式区域控制器(Domain Control Unit,DCU),即域控制器概念应运而生。
智能时代单车功能演进,整车架构有进一步革新。
微控制器在传统的车辆中为分布式架构,增加功能需同时配备对应ECU及线束,易造成整车电子架构的臃肿。
目前,单台高端乘用车的ECU数量已破百且线束长度逾2km,而数目、品种杂多的ECU也不利于系统功能的协同优化,整车扩展性差,软件开发和迭代成本高。
在智能时代下,传统单个处理器亦难以负荷激光雷达等高性能部件,以及自动驾驶高阶功能对于多汽车部件协同的要求。
二、域控制器发展优势基于ECU的分布式存在算力分散、线束成本及重量、通信带宽低以及集成维护困难四大问题,难以适应汽车智能化发展趋势。
AUTOSAR架构简述

AUTOSAR架构简述AUTOSAR(Automotive Open System Architecture)是一种用于汽车电子系统的开放式软件架构标准。
它由汽车制造商、电子部件供应商以及软件供应商共同制定和开发,旨在提高汽车电子系统的可重用性、可伸缩性和可互操作性。
AUTOSAR架构能够支持现代汽车的复杂功能,如自动驾驶、智能网联、电气化和车联网等。
1. 汽车平台层(Vehicle Platform Layer):该层是AUTOSAR架构的最底层,提供与硬件相关的功能,包括控制设备、传感器以及执行器等。
汽车平台层还负责与硬件抽象层进行通信,将硬件的细节屏蔽,使上层组件可以独立于硬件进行开发。
2. 基础软件层(Basic Software Layer):该层提供了一些通用的功能和服务,如通信、调度、存储管理、故障管理和诊断等。
基础软件层可以屏蔽底层的硬件差异,使上层组件可以以硬件无关的方式进行开发。
此外,基础软件层还提供了标准接口,使不同的软件组件可以方便地进行交互。
3. 中间件层(Middleware Layer):该层提供了一些中间件组件,用于管理和协调各个软件组件之间的通信。
中间件层能够确保消息的可靠传递,同时提供了灵活的通信方式,如定时触发、事件触发和共享数据传输等。
4. 应用层(Application Layer):该层是AUTOSAR架构的最顶层,包含了各种应用软件组件,如发动机控制、车身控制和车载娱乐等。
应用层的软件组件可以在不同的汽车电子系统中进行复用,从而显著提高软件的开发效率和质量。
除了以上四层架构,AUTOSAR还定义了一些标准接口和协议,用于实现不同层次之间的通信和协作,如CAN(Controller Area Network)、LIN(Local Interconnect Network)、UDP(User Datagram Protocol)和TCP/IP(Transmission Control Protocol/Internet Protocol)等。
汽车电子电气架构的“前世、今生和未来”(三)
512023/09·汽车维修与保养文/江苏 高惠民汽车电子电气架构的“前世、今生和未来”(三)(接上期)③通信技术以5G网络为代表的通信弥补了传统移动通信网络存在的传输带宽不足、网络时延较大等缺陷,具有高速度、低时延等优点。
5G车联网与自动驾驶结合,可显著降低系统响应的时间,进一步提升整车的性能,提高信息传输的精准性,以及降低对高精度传感器的依赖,从而降低成本。
同时5G网络为无人驾驶和车联网技术提供了更广阔的平台,能够有效提高无人驾驶的智能化和探测的精准度,从而降低交通事故的发生率。
④网络安全技术随着汽车向智能化和网联化演进,有越来越多的汽车实现了与云、其他汽车、行人、道路等周边环境和基础设施实时交换信息。
现代车载网络可以通过有线连接方式(如诊断仪接口、USB)和多种无线连接方式与外部设备连接,如图22所示。
图22 网络安全架构常见的汽车无线通信方式包括Wi-Fi、蓝牙、蜂窝网络(4G/5G)等。
丰富的连接方式使外部设备访问车载网络逐渐变得更便捷。
新一代的网联汽车与外部设备一直保持着通信,很容易成为被攻击的对象。
未来,车载网络可能面临无处不在的网络威胁,在这种情况下,不仅要保证驾驶员的人身安全,还要保证网络内其他联网汽车和基础设施的正常工作,车载网络安全就变得极其重要。
基于对车载网络安全威胁的分析,车载网络的安全防护涉及以下3个方面:车外安全网络、车内安全网络和安全硬件基础设施。
车载网络最大的安全威胁来自汽车外部,相对于传统汽车封闭的网络,智能网联汽车实时在线的特点使车载网络更容易被攻击,因此车外安全网络变得非常重要。
车内安全网络的威胁与车外安全网络的威胁相比要小很多,但是随着车内个性化应用的增多,也需要关注车内安全网络。
安全硬件基础设施是实现车外安全网络通信和车内安全网络通信的基础,主要包括专用的硬件安全模块、安全启动、可信启动、安全存储、安全OTA等。
⑤资源调度技术车联网系统需要运行大量应用以服务于智能网联汽车及交通系统各种场景。
如何看待小鹏的EEA3.0架构的进展
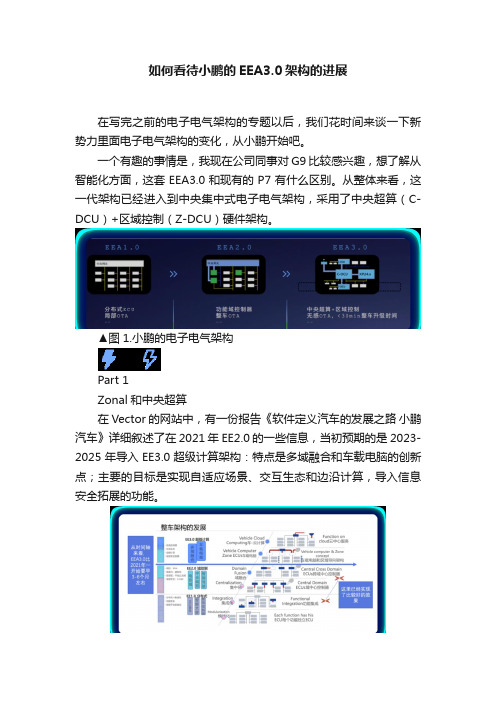
如何看待小鹏的EEA3.0架构的进展在写完之前的电子电气架构的专题以后,我们花时间来谈一下新势力里面电子电气架构的变化,从小鹏开始吧。
一个有趣的事情是,我现在公司同事对G9比较感兴趣,想了解从智能化方面,这套EEA3.0和现有的P7有什么区别。
从整体来看,这一代架构已经进入到中央集中式电子电气架构,采用了中央超算(C-DCU)+区域控制(Z-DCU)硬件架构。
▲图1.小鹏的电子电气架构Part 1Zonal和中央超算在Vector的网站中,有一份报告《软件定义汽车的发展之路小鹏汽车》详细叙述了在2021年EE2.0的一些信息,当初预期的是2023-2025年导入EE3.0超级计算架构:特点是多域融合和车载电脑的创新点;主要的目标是实现自适应场景、交互生态和边沿计算,导入信息安全拓展的功能。
▲图2.小鹏的电子电气架构根据现有的信息来看,小鹏的中央计算平台,主要包含座舱和通信两大部分,这块也是和特斯拉相似,围绕智能化、科技化的大脑去做强性能的超算平台并做了大集成。
核心的部件包括:◎高通最新一代8155P处理器,该芯片采用7纳米制程、8核心配置◎瑞萨第三代旗舰MCU,我查了下可能是第三代RXv3 CPU内核的MCU里面高配置的核心从功能配置来看,这个中央超算包含原有的仪表显示、中控和副驾信息娱乐功能,然后进行跨域融合包括中央网关、车外声音控制、外部灯语控制、氛围灯控制和泊车辅助灯功能。
在这个中央超算的通信功能中,把原有EE2.0的架构加进去了,如下图3所示:2路千兆以太网1000Base-T1,用来连接XPU4.x和5G智能天线;6路百兆以太网,其中2路连接左右的LDCU和RDCU,有一路以太网诊断和4路CAN FD和CAN通信;底盘CAN和LDCU和RDCU的私有通信用了CANFD、bodyCAN和PT CAN因为要兼容所以才用了高速CAN (500kbps)。
备注:PT CAN主要迁就之前的BMS还有兼容性的控制器,我估计到2023年不断优化以后也会升级。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
书山有路勤为径;学海无涯苦作舟
新一代汽车软件和整车电子架构
随着智能互联、自动驾驶、电动汽车及共享出行的发展,软件、计算
能力和先进传感器正逐渐取代发动机的统治地位。
与此同时,这些电子系
统的复杂性也在提高。
以当今汽车包含的软件代码行数(SLOC)为例,2010年,主流车型的SLOC约为1000万行;到2016年达到1.5亿行左右。
复杂性正如滚雪球般越来越高,不可避免地导致了与软件相关的若干严重
质量问题:这在近期若干起大规模车辆召回事件中屡有耳闻。
//
解决迫在眉睫的行业隐忧
//
当前,软件在D级车(或大型乘用车)的整车价值中占10%左右,预计
将以每年11%的速度增长,到2030年将占整车内容的30%。
数字化汽车价
值链上的所有企业均在尝试从软件和电子技术带来的创新中获利(见图1)。
软件公司和其他数字技术企业正从目前的二、三级供应商逐步成为整车企
业的一级供应商。
他们超越了功能和应用程序(APP)的范围,进一步涉
足操作系统,加深在汽车“技术栈”中的参与度。
同时,传统的汽车电子
系统一级供应商正在大胆进入IT巨头所在的功能与应用程序领域。
豪华
品牌车企则正进入操作系统、硬件简化、信号处理等更底层的技术领域,
以期从根本上确保其技术优势和独特性。
这些战略举措的结果之一是车辆架构将变为以通用运算平台为基础的,
面向服务的架构(SOA)。
开发者将得以添加新的智能互联解决方案、APP、人工智能元素、高级分析工具和操作系统等。
差异化(或独特性)
将不再仅仅停留于传统的车辆硬件方面,而更多地通过由软件和先进电子
专注下一代成长,为了孩子。