第6章驱动集成电路
集成电路原理第六章S知识分享
VGG为固定偏置,则 vg2=0
vgs2 vg2 vs2 vs2
vbsvs2
i0gd2s(v0vs2)gm 2( vs2)gm2b (s vs2)
vs2ri0
(6-3)
图6-3
接电阻增加输出电阻 的结构与等效电路
2020/10/19
而饱和区衬底跨导
gm
b2sviDBSS
假设:VDD=10V,VBV=6.5V,rz=100,R=35k,则此基准电压源的灵敏 度为0.0044。
2020/10/19
3、CMOS带隙基准源
CMOS带隙基准源电路见 图6-13,此结构实现了一种较 为精确的基准电压源。主要利 用了MOSFET的亚阈区工作时电 流的正温度系数特性与BJT的 BE结导通电压VBE的负温度特 性相互补偿,达到恒定的基准 电压输出。
模拟集成运算放大器电路分层说明
2020/10/19
10Bits 105MSPS 3V ADC 原理图
2020/10/19
无缓冲二级CMOS运放电路
电流镜 源耦合对 偏置电路
共源放大器
2020/10/19
多路电流放大器
6.2.1 电流源与电流沉(Current Source and Sink) 所谓电流源或电流沉,是指一种在任何时间内,其电流值
2020/10/19
6.2.3 基准源
理想的基准电压源或电流源应不受电源和温度变化的影响。 “基准”即是强调基准源的输出数值比一般电源的数值有更高 的精度和稳定性。通常基准与其连接的负载有关,可用缓冲放 大器使其和负载隔开,同时保持良好的性能。
1、简单的电压分压器
VREFVDD
R2 R1 R2
第6章第2节集成电路
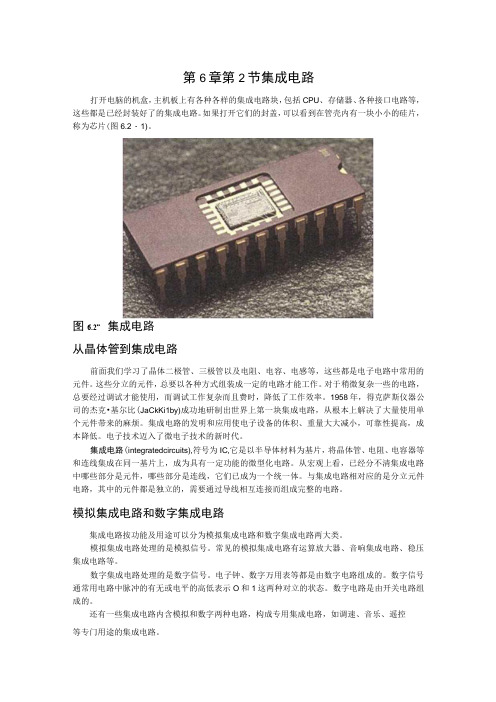
第6章第2节集成电路打开电脑的机盒,主机板上有各种各样的集成电路块,包括CPU、存储器、各种接口电路等,这些都是已经封装好了的集成电路。
如果打开它们的封盖,可以看到在管壳内有一块小小的硅片,称为芯片(图6.2・1)。
图6.2”集成电路从晶体管到集成电路前面我们学习了晶体二极管、三极管以及电阻、电容、电感等,这些都是电子电路中常用的元件。
这些分立的元件,总要以各种方式组装成一定的电路才能工作。
对于稍微复杂一些的电路,总要经过调试才能使用,而调试工作复杂而且费时,降低了工作效率。
1958年,得克萨斯仪器公司的杰克•基尔比(JaCkKi1by)成功地研制出世界上第一块集成电路,从根本上解决了大量使用单个元件带来的麻烦。
集成电路的发明和应用使电子设备的体积、重量大大减小,可靠性提高,成本降低。
电子技术迈入了微电子技术的新时代。
集成电路(integratedcircuits),符号为IC,它是以半导体材料为基片,将晶体管、电阻、电容器等和连线集成在同一基片上,成为具有一定功能的微型化电路。
从宏观上看,已经分不清集成电路中哪些部分是元件,哪些部分是连线,它们已成为一个统一体。
与集成电路相对应的是分立元件电路,其中的元件都是独立的,需要通过导线相互连接而组成完整的电路。
模拟集成电路和数字集成电路集成电路按功能及用途可以分为模拟集成电路和数字集成电路两大类。
模拟集成电路处理的是模拟信号。
常见的模拟集成电路有运算放大器、音响集成电路、稳压集成电路等。
数字集成电路处理的是数字信号。
电子钟、数字万用表等都是由数字电路组成的。
数字信号通常用电路中脉冲的有无或电平的高低表示O和1这两种对立的状态。
数字电路是由开关电路组成的。
还有一些集成电路内含模拟和数字两种电路,构成专用集成电路,如调速、音乐、遥控等专门用途的集成电路。
集成电路的优点集成电路与分立元件电路相比,不仅体积小了几个数量级、重量轻了几个数量级,而且具有分立元件电路无可比拟的其他优点。
第6章_时序逻辑电路 课后答案

第六章 时序逻辑电路【题 6.3】 分析图P6.3时序电路的逻辑功能,写出电路的驱动方程、状态方程和输出方程,画出电路的状态转换图,说明电路能否自启动。
Y图P6.3【解】驱动方程:11323131233J =K =Q J =K =Q J =Q Q ;K =Q ⎧⎪⎨⎪⎩ 输出方程:3YQ =将驱动方程带入JK 触发器的特性方程后得到状态方程为:n+11313131n 12121221n+13321Q Q Q Q Q Q Q Q Q Q Q Q Q Q Q Q Q Q +⎧=+=⎪=+=⊕⎨⎪=⎩ 电路能自启动。
状态转换图如图A6.3【题 6.5】分析图P6.5时序电路的逻辑功能,写出电路的驱动方程、状态方程和输出方程,画出电路的状态转换图。
A 为输入逻辑变量。
图A6.3Y图P6.5【解】驱动方程: 1221212()D AQ D AQ Q A Q Q ⎧=⎪⎨==+⎪⎩输出方程: 21Y AQ Q =将驱动方程带入JK 触发器的特性方程后得到状态方程为:n+112n+1212()Q AQQ A Q Q ⎧=⎪⎨=+⎪⎩ 电路的状态转换图如图A6.51图A6.5【题 6.6】 分析图P6.6时序电路的逻辑功能,画出电路的状态转换图,检查电路能否自启动,说明电路能否自启动。
说明电路实现的功能。
A 为输入变量。
AY图P6.6【解】驱动方程: 112211J K J K A Q ==⎧⎨==⊕⎩输出方程: 1212Y AQ Q AQ Q =+将驱动方程带入JK 触发器的特性方程后得到状态方程为:n+111n+1212QQ Q A Q Q ⎧=⎪⎨=⊕⊕⎪⎩ 电路状态转换图如图A6.6。
A =0时作二进制加法计数,A =1时作二进制减法计数。
01图A6.6【题 6.7】 分析图P6.7时序电路的逻辑功能,写出电路的驱动方程、状态方程和输出方程,画出电路的状态转换图,说明电路能否自启动。
Y图P6.7【解】驱动方程: 001023102032013012301;;;J K J Q Q Q K Q J Q Q K Q Q J Q Q Q K Q==⎧⎪=•=⎪⎨==⎪⎪==⎩ 输出方程: 0123Y Q Q Q Q =将驱动方程带入JK 触发器的特性方程后得到状态方程为:*00*1012301*2023012*3012303()Q ()Q Q Q Q Q Q Q Q Q Q Q Q Q Q Q Q Q Q Q Q Q Q⎧=⎪=++⎪⎨=++⎪⎪=+⎩ 设初态Q 1Q 3Q 2Q 1 Q 0=0000,由状态方程可得:状态转换图如图A6.7。
第六章大规模集成电路

( 0,0)( 0,1)( 0,2)( 0,3)……( 0,63)( 0,64 )
( 2,0)( 2,1)( 2,2)( 2,3)……( 2,63)( 2,64 )
子
技 术
X30 X31
(30,0)(30,1)(30,2)(30,3)……(30,63)(30,64) (31,0)(31,1)( 3,2)(31,3)……(31,63)(31,64 )
第六章 大规模集成电路(LSI integrated circuit)
数
字
电
子
技 术
中北大学电子信息工程系
第六章 大规模集成电路(LSI integrated circuit)
3 动态存储单元
数
字
电
利用MOS管栅极电容的电荷存储效应来组成动态 存储器。 优点:单元电路简单
子
技 术
缺点:由于栅极电容的容量很小,通常只有几个 pF,且不可能没有漏电流,所以,电荷的存储时 间有限。 克服的办法:为了能及时的补充泄漏掉的电荷, 以避免存储信息的丢失,必须定时地给栅极电容补 充电荷,把这种操作叫做刷新。
中北大学电子信息工程系
第六章 大规模集成电路(LSI integrated circuit)
数
字
电
子
技 术
中北大学电子信息工程系
第六章 大规模集成电路(LSI integrated circuit)
数
1)读操作程序 A 先加预充电脉冲,使CB、C/B充电至高电平 B 使X、Y同时为高电平 2)写操作程序 使X、Y同时为高电平即可写入。
数
1、ROM的结构
字
电
子
技 术
输入驱动器:起着缓冲的作用,且生成互补的输入 信号。 输出缓冲器:既有缓冲作用,有可以提供不同的 输出结 构,如三态输出、OC输出等。
电子课件电子技术基础第六版第六章门电路及组合逻辑电路可编辑全文

逻辑函数除可以用逻辑函数表达式(逻辑表达式)表示以 外,还可以用相应的真值表以及逻辑电路图来表示。真值表 与前述基本逻辑关系的真值表类似,就是将各个变量取真值 (0 和 1)的各种可能组合列写出来,得到对应逻辑函数的真 值(0 或 1)。逻辑电路图(逻辑图)是指由基本逻辑门或复 合逻辑门等逻辑符号及它们之间的连线构成的图形。
TTL 集成“与非”门的外形和引脚排列 a)外形 bOS 集成门电路以绝缘栅场效应管为基本元件组成, MOS 场效应管有 PMOS 和NMOS 两类。CMOS 集成门电路 是由 PMOS 和 NMOS 组 成的互补对称型逻辑门电路。它具 有集成度更高、功耗更低、抗干扰能力更强、扇出系数更大 等优点。
三、其他类型集成门电路
1. 集电极开路与非门(OC 门) 在这种类型的电路内部,输出三极管的集电极是开路的, 故称集电极开路与非门,也称集电极开路门,简称 OC 门。
OC 门 a)逻辑符号 b)外接上拉电阻
74LS01 是一种常用的 OC 门,其外形和引脚排列如图所 示。
74LS01 的外形和引脚排列 a)外形 b)引脚排列
2. 主要参数 TTL 集成“与非”门的主要参数反映了电路的工作速度、抗 干扰能力和驱动能力等。
TTL 集成“与非”门的主要参数
TTL 集成“与非”门具有广泛的用途,利用它可以组成很多 不同逻辑功能的电路,其外形和引脚排列如图所示。如 TTL“ 异或”门就是在 TTL“与非”门的基础上适当地改动和组合而成 的;此外,后面讨论的编码器、译码器、触发器、计数器等 逻辑电路也都可以由它来组成。
(整理)集成电路原理学习指南-第二版

沟道等效电阻
(1)与W/L反比,
(2)与电压有关,
(3)VDD大的时候较小(饱和工作区)
(4)VDD接近Vt的时候急剧增大
(5)一般使用工作区平均电阻
掌握
3.18
电阻的近似
平均电阻,并估算其误差(保守估计还是过估计)
掌握
3.19
结构电容
栅电容,覆盖电容
掌握
3.20
沟道电容
在不同工作区域的变化和原因,在阈值附近最小
f=Cext/Cint=Cext/γCg,尺寸决定电容,所以也是扇出尺寸,为工艺决定的系数,代表自电容与栅电容的关系
掌握
5.13
反相器链的最优尺寸设计
每一级为前后级的几何平均
扇出系数公式(5.35),公式(5.36)
掌握
5.14
最佳等效扇出
图5.21(pp 152),一般取4
掌握
5.15
上升下降时间对延时的影响
了解
3.26
电容估算
(1)栅电容,扩散电容大致相当(定义单位NMOS和PMOS的栅电容为C)
(2)它们随沟道宽度等比增加(kC)
(3)最小晶体管C值可初略估计为1fF/um宽度(65nm工艺,宽0.1um晶体管的C值约为0.1fF)
[Weste,4.3.2]
掌握
第四章导线
序号
概念
知识点和关键词
掌握程度
掌握
3.13
MOS IV特性
画出IV图,标出工作区,图3.24(pp 74)
掌握并会定性画图
3.14
手工分析的局限
在电阻区和过度区之间的区域偏差较大
了解
3.15
设计测试点验证IV
知道晶体管几个端口的电压,固定哪个,量哪个电流,可以提取以上列出的某个参数。
机械电子学-第6章 步进电动机的驱动与控制
认识步进电动机
功能 • 将电脉冲信号转换成转角或转速信号。 • 转角 ∝脉冲信号的个数; • 转速 ∝脉冲信号的频率。 • 转向取决于脉冲信号的相序
f
相
f N
通电脉冲频率 拍数
步进电动机的特点
2) 步距角
步进机通过一个电脉冲转子转过的角度,称为步距角。
S
360 ZrN
N:一个周期的运行拍数 Zr:转子齿数
如:Zr=40 ,
N=3 时
S
360 40 3
3
1 单拍制
拍数:N=km m:相数 k=
整步
2 双拍制
半步
步距角不受各种干扰因素的影响。
步进电动机的特点
2) 步距角
步进电动机的特点
3) 转速
每输入一个脉冲,电机转过
S
360 ZrN
即转过整个圆周的1/(ZrN), 也就是1/(ZrN)转
因此每分钟转过的圆周数,即转速为
n
60f ZrN
60f 360 360Z r N
s f
6
(r / min)
步进电动机的特点
4)误差不长期积累。 5)可实现数字信号的开环控制,控制系统廉价。 6)步进电机具有自锁能力
齿距角 为使转、定子的齿对齐,定子磁极上的小齿, 齿宽和齿槽和转子相同。
工作原理:假设是单三拍通电工作方式。
(1)A 相通电时,定子A 相的五个小齿和转子对 齐。此时,B 相和 A 相空间差120,含
120/9 = 13 1 齿 3
A 相和 C 相差240,含240/ 9 =26 2个齿。所以, A 相的转子、定子的五个小齿对齐时,3B 相、C 相不能 对齐,B相的转子、定子相差 1/3 个齿(3),C相的 转子、定子相差2/3个齿(6)。
数电第六章时序逻辑电路
• 根据简化的状态转换图,对状态进行编码,画出编码形式 的状态图或状态表
• 选择触发器的类型和个数 • 求电路的输出方程及各触发器的驱动方程 • 画逻辑电路图,并检查电路的自启动能力 EWB
典型时序逻辑集成电路
• 寄存器和移位寄存器 – 寄存器 – 移位寄存器 –集成移位寄存器及其应用 • 计数器 – 计数器的定义和分类 – 常用集成计数器 • 74LVC161 • 74HC/HCT390 • 74HC/HCT4017 – 应用 • 计数器的级联 • 组成任意进制计数器 • 组成分频器 • 组成序列信号发生器和脉冲分配器
– 各触发器的特性方程组:Q n1 J Q n KQ n CP
2. 将驱动方程组代入相应触发器的特性方程,求出各触发器 的次态方程,即时序电路的状态方程组
n n FF0:Q0 1 Q 0 CP n n n FF1:Q1 1 A Q0 Q1 CP
同步时序逻辑电路分析举例(例6.2.2C)
分析时序逻辑电路的一般步骤
• 根据给定的时序电路图写方程式 – 各触发器的时钟信号CP的逻辑表达式(同步、异步之分) – 时序电路的输出方程组 – 各触发器的驱动(激励)方程组 • 将驱动方程组代入相应触发器的特性方程,求出各触发器 的次态方程,即时序电路的状态方程组 • 根据状态方程组和输出方程组,列出该时序电路的状态 表,画状态图或时序图 • 判断、总结该时序电路的逻辑功能
• 电路中存在反馈
驱动方程、激励方程: E F2 ( I , Q )
状态方程 : Q n1 F3 ( E , Q n ) • 电路状态由当前输入信号和前一时刻的状态共同决定
• 分为同步时序电路和异步时序电路两大类
什么是组合逻辑电路?
第6章 时序逻辑电路-习题答案
第六章 时序逻辑电路6-1 分析题图6-1所示的同步时序电路,画出状态图。
题图6-1解: 11221211n n n n J K Q T Q Z Q Q ====,,,,11111111212n n n n nn n nQ J Q K Q Q Q Q Q Q +=+=+=+122212n n n n Q T Q Q Q +=⊕=⊕,状态表入答案表6-1所示,状态图如图答案图6-1所示。
答案表6-1答案图6-16-2 分析题图6-2所示的同步时序电路,画出状态图。
题图6-2 解:按照题意,写出各触发器的状态方程入下:11J K A ==,21n J Q =,21K =,1212n n nQ Q Q +=,111n n Q A Q +=⊕状态表入答案表6-2所示,状态图如图答案图6-2所示。
答案表6-2答案图6-2Q 2n Q 1n Q 2n+1 Q 1n+1 Z0 0 0 1 1 0 1 1 0 1 1 1 1 1 0 0 0 0 0 1A Q 2n Q 1n Q 2n+1 Q 1n+1 0 0 0 0 0 1 0 1 0 0 1 1 1 0 0 1 0 1 1 1 0 1 1 1 0 0 1 1 0 0 0 1 0 1 1 0 0 1 0 0CLK D 1D 2D 3Q 3Q 2Q 1Q 2Q 3Q 1Q 1Q 2Q 3&6-3分析题图6-3所示的同步时序电路,画出状态图。
题图6-3解:按照题意,写出各触发器的状态方程入下:1112213232131n n n nn J K T J K Q Q T J Q Q K Q ========1,,, 133********n n n n n n n nQ J Q K Q Q Q Q Q Q +=+=+ 1222132n n n n nQ T Q Q Q Q +=⊕=⊕ 1111111n n n n Q T Q Q Q +=⊕=⊕=答案表6-3答案图6-36-4 在题图6-4所示的电路中,已知寄存器的初始状态Q 1Q 2Q 3=111。
第6章_课后习题答案1006
第6章 习题解答6-1 指出下列各类型的触发器中那些能组成移位寄存器,哪些不能组成移位寄存器,如果能够,在()内打√,否则打×。
(1)基本RS 触发器 ( ); (2)同步RS 触发器 ( ); (3)主从结构触发器 ( ); (4)维持阻塞触发器 ( );(5)用CMOS 传输门的边沿触发器 ( );(6)利用传输延迟时间的边沿触发器( )。
解答:(1)×;(2)×;(3)√;(4)√;(5)√;(6)√;6-2 试分析图6-79所示时序电路的逻辑功能,写出电路的驱动方程、状态方程和输出方程,画出电路的状态转换图,并且说明电路能够自启动。
解答: 驱动方程:113J K Q ==;221J K Q ==;312J Q Q =、33K Q = 状态方程:111111313113n Q J Q K Q Q Q Q Q Q Q +=+=+=e 122222121212n Q J Q K Q Q Q QQ Q Q +=+=+=⊕13333312333123n Q J Q K Q QQ Q Q Q QQ Q +=+=+=输出方程:123CO QQ Q =状态转换表如下:5 100 000 1 101 011 1 110 010 11110011状态转换图如下:此电路为能自启动的同步五进制加法计数器。
6-3 试分析图6-80所示时序电路的逻辑功能,写出电路的驱动方程、状态方程和输出方程,画出电路的状态转换图。
A 为输入逻辑变量。
解答: 驱动方程:12D AQ =;21212()D AQ Q A Q Q ==+ 状态方程:1112n Q D AQ +==12212()n Q D A Q Q +==+输出方程:12CO AQQ = 状态转换表如下:脉冲数 A 初态21Q Q次态1121n n Q Q ++输出CO1 0 00 00 02 0 01 00 03 0 10 00 04 0 11 00 0100011 01 11 0 1 11 10 1110101状态转换图如下:此电路为串行数据检测器,当输入4个或4个以上的1时输出为1,其他输入情况下输出为0。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第6章 集成驱动电路
2011年10月
内容
一、高压大电流达林顿晶Байду номын сангаас管阵列 (补)步进电机概述 二、stepper motor driver MC3479
一、高压大电流达林顿晶体管阵列
1、概述: 美国Texas Instruments 、美国Sprague 等公司生产 单片双极型大功率高速集成电路 500-mA-Rated Collector Current (Single Output) High-Voltage Outputs . . . 50 V Output Clamp Diodes Inputs Compatible With Various Types of Logic Applications
6、光耦隔离
二、stepper motor driver MC3479
7、典型电路
。
• 环形分配器的功能是在控制器的步进脉冲和方向信号 作用下产生步进电机各相需要的通断控制信号。 • 环形分配器主要类型有:专用集成芯片、EPROM电路、 数字电路、可编程器件和软件产生方法。
二、stepper motor driver MC3479
•
• • • • • • • • • •
1、特点: two–phase stepper motor in the bipolar mode Single Supply Operation: 7.2 to 16.5 V 350 mA/Coil Drive Capability Clamp Diodes Provided for Back–EMF Suppression Selectable CW/CCW and Full/Half Step Operation Selectable High/Low Output Impedance (Half Step Mode) TTL/CMOS Compatible Inputs Input Hysteresis: 400 mV Minimum Phase Logic Can Be Initialized to Phase A Phase A Output Drive State Indication (Open–Collector) Available in Standard DIP and Surface Mount
(补)步进电机概述
反应式步进电机工作原理 定子上有三对磁极 则齿距角为
θ Z 2
2
Z
9
o
Z=40,则齿距角为θ Z
40
A相绕组通电:A相转子齿与定子齿对齐位置B相转子齿与定子齿错 开了1/3齿 在A相绕组断电,B相绕组通电时,转子的位置与A相绕组通电时的 平衡位置相比,沿ABC方向转了1/3齿距,即3o空间角 在B相绕组断电,C相绕组通电时,则建立以CC′为轴线的磁场。 转子沿ABC方向又转了1/3齿距。 •当以A-B-C-A-的顺序不断地给各个绕组轮流通电时,步进电机内 的磁场沿ABC方向不断转动。每改变一次通电状态,磁场轴线沿 ABC方向旋转120o,转子沿ABC方向转1/3齿距。当A、B、C各绕组 轮流通电完成一个循环时,磁场沿ABC方向旋转360o,转子沿ABC 方向转过一个齿距。同理,当以A-C-B-A-的顺序不断地给各个绕 组轮流通电时,步进电机内的磁场沿ACB方向不断转动,步进电机 这种工作方式为三相单三拍工作方式。
二、stepper motor driver MC3479
2、框图与管脚
二、stepper motor driver MC3479
3、使用条件
二、stepper motor driver MC3479
4、内部结构
二、stepper motor driver MC3479
5、典型应用
二、stepper motor driver MC3479
●伺服电机 ●步进电机 ●电磁阀 ●照明灯
一、高压大电流达林顿晶体管阵列
2、ULN2003电路结构
一、高压大电流达林顿晶体管阵列
3、互换表
一、高压大电流达林顿晶体管阵列
4、ULN2003极限参数
ULN2003在继电器接口板中应用
计算机 数字量输入输出卡
继电器接口板
被控制设备
继电器接口板
功能\组成\原理\特点
(补)步进电机概述
步进电机、伺服电机和测速电机等各种控制电机要求有较高的控制 性能,能量的转换是次要的 步进电机是一种用电脉冲信号进行控制、并将电脉冲信号转变为相 应角位移或线位移的控制电机。 给电机加一个脉冲信号,电机则转过一个步距角。在负载能力的范 围内,可以通过控制脉冲个数来控制角位移量,从而达到准确定位 的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速 度,从而达到调速的目的。 步进电机适合于速度、位置等控制领域,作为数字控制系统的执行 元件。如各种数控机床、自动绘图仪、自动记录仪、印刷设备和机 器人等。 步进电机种类
按步进电机的运行方式,可以将步进电机分为旋转式和直线式两类。 步进电机按结构特点进行分类反应式(磁阻式)步进电机(VR)\永磁 式步进电机(PM)\混合式(感应子式)步进电机(HB) 步进电机按绕组中电流方向进行分类 :单极性步进电机:每极有两个 绕组,每个绕组中电流仅沿一个方向流动,它也被称为两线步进电机。 双极性步进电机:每极只有单一的绕组,每个绕组都可以两个方向通 电