球面和共轴球面系统的理想成像
合集下载
1.2球面和共轴球面系统的理想成像

① 规定角特指锐角。顺时针为正, 反之为负。 ② 孔径角是由光轴转到光线;
物方孔径角-U 像方孔径角U'
A
n
E
n'
I'
h
I
-U
o
φ
c
U'
A'
① 其它角(入射角、-反射角、 折射角)是由光线转到法线。
L
r
L'
1.3单球面近轴区的物像关系
1.3.1单球面成像的不完善性
1.3单球面近轴区的物像关系
1.3.2近轴区的完善成像
y‘ nl' β ' y nl
1.4单球面的焦距和焦度
1.4.1从L= -∞,即无穷远处的光线平行于光轴 入射,被折射球面所成的像点称为像方焦点, 也称后焦点或第二焦点。OF2称像方焦距或后焦 n 距或第二焦距。由单球面高斯公式,L= -∞时, ≈0,则可得像方焦距为 l
n n n -n ' l l r
A' B'
3. 理想(高斯)光学系统
3.3理想光学系统的物像关系
3.3.1作图法求像
(2)薄透镜的成像作图
B' A'
3. 理想(高斯)光学系统
3.3理想光学系统的物像关系
3.3.2公式法求像
(1)牛顿公式 pp’=ff’ β=y’/y=- f/p=-p’/f’ (2)高斯公式 N’/l’-n/l=n’/f’ β=nl’/n’l
'
'
nr ' OF2 = f = ' l n -n
'
'
1.4单球面的焦距和焦度
1.4.3在单球面的高斯公式 中 ,
物方孔径角-U 像方孔径角U'
A
n
E
n'
I'
h
I
-U
o
φ
c
U'
A'
① 其它角(入射角、-反射角、 折射角)是由光线转到法线。
L
r
L'
1.3单球面近轴区的物像关系
1.3.1单球面成像的不完善性
1.3单球面近轴区的物像关系
1.3.2近轴区的完善成像
y‘ nl' β ' y nl
1.4单球面的焦距和焦度
1.4.1从L= -∞,即无穷远处的光线平行于光轴 入射,被折射球面所成的像点称为像方焦点, 也称后焦点或第二焦点。OF2称像方焦距或后焦 n 距或第二焦距。由单球面高斯公式,L= -∞时, ≈0,则可得像方焦距为 l
n n n -n ' l l r
A' B'
3. 理想(高斯)光学系统
3.3理想光学系统的物像关系
3.3.1作图法求像
(2)薄透镜的成像作图
B' A'
3. 理想(高斯)光学系统
3.3理想光学系统的物像关系
3.3.2公式法求像
(1)牛顿公式 pp’=ff’ β=y’/y=- f/p=-p’/f’ (2)高斯公式 N’/l’-n/l=n’/f’ β=nl’/n’l
'
'
nr ' OF2 = f = ' l n -n
'
'
1.4单球面的焦距和焦度
1.4.3在单球面的高斯公式 中 ,
共轴球面系统成像的原理
共轴球面系统成像的原理
共轴球面系统(Spherical Coordinate Imaging,SCI)是一种用于成像的技术,其原理基于球面坐标系的数学模型,将空间中的点用三个参数(径向距离、角度和极角)来描述,即r(径向距离)、θ(角度)和φ(极角)。
共轴球面系统成像的原理如下:
1. 首先,将待成像区域划分为一系列小单元,每个小单元对应一个球面坐标系上的点。
2. 对于每个小单元,通过探测器阵列采集其反射或散射的光线,并将其转化为电信号。
3. 将每个小单元对应的球面坐标转化为直角坐标系中的坐标点,并将其输入到图像处理系统中。
4. 图像处理系统根据每个坐标点的位置和亮度信息,计算出其在图像中的像素值,并将其输出到显示器上,从而得到共轴球面系统的成像结果。
共轴球面系统成像的优点在于能够提供比传统成像技术更为全面和详细的图像信息,特别是在对复杂目标的成像方面具有优势。
此外,
共轴球面系统成像还具有高分辨率、高信噪比和低失真率等优点,因此在医学成像、工业检测、天文观测等领域得到了广泛应用。
3-4共轴系统成像
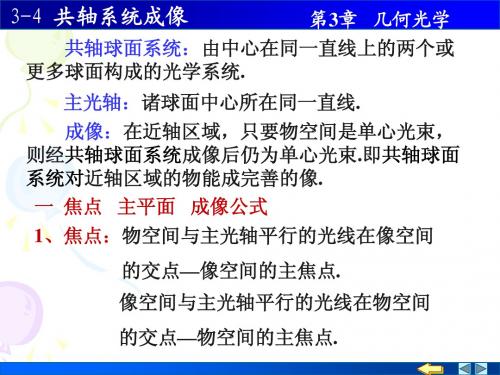
3-4 共轴系统成像
第3章 几何光学 共轴球面系统:由中心在同一直线上的两个或 更多球面构成的光学系统.
主光轴:诸球面中心所在同一直线.
成像:在近轴区域,只要物空间是单心光束, 则经共轴球面系统成像后仍为单心光束.即共轴球面 系统对近轴区域的物能成完善的像. 一 焦点 主平面 成像公式 1、焦点:物空间与主光轴平行的光线在像空间
i i 有 LN RN P R3 P2 R2 P R1 L1 A L1 3 1
其中;A—称为系统矩阵.(可用矩阵乘法计算)
a11 a12 11 12 11 12 aij i1 1 j i 2 2 j a a 21 22 21 22 21 22 i = 1 , 2 j = 1 , 2
S’k
-sk-1
nk 1
dk
S’k-1
sk
nk 1 nk 1 yk 1 ( ) yk 1 k 1 sk 1 sk 1
nk 1uk 1 nk 1uk 1 yk 1 k 1
yk 1 0 yk 1
1 0 k 1 1
因为两空间主平面是共扼的,所以系统的垂直 放大率 β = 1 .
3-4 共轴系统成像
证明:如图
M
第3章 几何光学
M’
h h h h F’ H H’ h s F h’ h’ h’ f tan -x -f f’ x’ x tan( ) -s s’ f (此系统的原点必需以两个主 x 若物点在主平面上, 平面为原点.)
从几何光学角度,共轴球面光学系统成像,不 过是光在光学系统的各面上折(反)射的结果.如果 能确定各面上折(反)射的光路,最终可得光学系 统的成像性质.光路计算方法很多,逐面计算加上相 邻面过渡条件的方法,思路简单,但在用计算机进 行光学系统设计中不甚方便.利用矩阵代数计算光路 为共轴球面光学系统计算机设计提供了途径. 设;共轴球面光学系统有 N 个折(反)射面, 如图. 计算在系统中任意两个相邻面上光线的折射.
第3章 几何光学 共轴球面系统:由中心在同一直线上的两个或 更多球面构成的光学系统.
主光轴:诸球面中心所在同一直线.
成像:在近轴区域,只要物空间是单心光束, 则经共轴球面系统成像后仍为单心光束.即共轴球面 系统对近轴区域的物能成完善的像. 一 焦点 主平面 成像公式 1、焦点:物空间与主光轴平行的光线在像空间
i i 有 LN RN P R3 P2 R2 P R1 L1 A L1 3 1
其中;A—称为系统矩阵.(可用矩阵乘法计算)
a11 a12 11 12 11 12 aij i1 1 j i 2 2 j a a 21 22 21 22 21 22 i = 1 , 2 j = 1 , 2
S’k
-sk-1
nk 1
dk
S’k-1
sk
nk 1 nk 1 yk 1 ( ) yk 1 k 1 sk 1 sk 1
nk 1uk 1 nk 1uk 1 yk 1 k 1
yk 1 0 yk 1
1 0 k 1 1
因为两空间主平面是共扼的,所以系统的垂直 放大率 β = 1 .
3-4 共轴系统成像
证明:如图
M
第3章 几何光学
M’
h h h h F’ H H’ h s F h’ h’ h’ f tan -x -f f’ x’ x tan( ) -s s’ f (此系统的原点必需以两个主 x 若物点在主平面上, 平面为原点.)
从几何光学角度,共轴球面光学系统成像,不 过是光在光学系统的各面上折(反)射的结果.如果 能确定各面上折(反)射的光路,最终可得光学系 统的成像性质.光路计算方法很多,逐面计算加上相 邻面过渡条件的方法,思路简单,但在用计算机进 行光学系统设计中不甚方便.利用矩阵代数计算光路 为共轴球面光学系统计算机设计提供了途径. 设;共轴球面光学系统有 N 个折(反)射面, 如图. 计算在系统中任意两个相邻面上光线的折射.
L04-C2-3 理想系统成像规律及求解

3
Applied optics
3. 理想光学系统的基本概念
1
单个球面的主点与顶点重合
1
置于空气中的系统,节点与 主点重合
(1)F与F’不是共轭点 F ’ 共轭于 轴上无穷远物点 F 共轭于 轴上无穷远像点 (2)焦距的计算
f ' h1 / tan(Uk ') h1 / uk '
f 2 '( f1 ' f 2 ) xH ' xF ' f ' f1 ( f1 ' f 2 ) xH xF f
20
Applied optics
4. 垂轴放大率
H1
A
H1’
H2
H2’
x
F
xF
F1
x1
按牛顿公式
f x' x f'
物点对组合系统的物距-x,对第一光组的物距-x1, 组合系统物 方焦点距第一系统焦点的距离-xF
x x1 xF x1 f1 f1 '
f1 f 2 f1 f1 ' x1
表明,双光组系统(已知各自的焦距)的垂直放大率,可 由物点相对于第一光组物方焦点的距离x1直接求得。
21
Applied optics
例4
• 一组合系统由薄正透镜和薄负透镜组成, 两者的焦距分别为20mm和-20mm,间隔为 10mm;当一物体位于正透镜前方100mm处, 求组合系统的垂轴放大率的像的位置。
i
i 1 k
nl1 ' l2 ' lk ' n ' l1l2 lk
1 2 ... k
n1 1 nk '
Applied optics
3. 理想光学系统的基本概念
1
单个球面的主点与顶点重合
1
置于空气中的系统,节点与 主点重合
(1)F与F’不是共轭点 F ’ 共轭于 轴上无穷远物点 F 共轭于 轴上无穷远像点 (2)焦距的计算
f ' h1 / tan(Uk ') h1 / uk '
f 2 '( f1 ' f 2 ) xH ' xF ' f ' f1 ( f1 ' f 2 ) xH xF f
20
Applied optics
4. 垂轴放大率
H1
A
H1’
H2
H2’
x
F
xF
F1
x1
按牛顿公式
f x' x f'
物点对组合系统的物距-x,对第一光组的物距-x1, 组合系统物 方焦点距第一系统焦点的距离-xF
x x1 xF x1 f1 f1 '
f1 f 2 f1 f1 ' x1
表明,双光组系统(已知各自的焦距)的垂直放大率,可 由物点相对于第一光组物方焦点的距离x1直接求得。
21
Applied optics
例4
• 一组合系统由薄正透镜和薄负透镜组成, 两者的焦距分别为20mm和-20mm,间隔为 10mm;当一物体位于正透镜前方100mm处, 求组合系统的垂轴放大率的像的位置。
i
i 1 k
nl1 ' l2 ' lk ' n ' l1l2 lk
1 2 ... k
n1 1 nk '
应用光学 第二章 球面和球面系统

一.符号规则
1、沿轴线段:L、 L 、r以折射球面(或反射面)
顶点O为原点,到光线与光轴交点或球心的方向 与光线的传播方向相同,其值为正,反之为负;
2、垂轴线段:以光轴为基准,在光轴上为正,反 之为负; 3、孔径角U和U′ :光轴以锐角方向转到光线,顺 时针为正,逆时针为负; 4、光线与法线的夹角:I 和I′ ,光线以锐角方向 转到法线,顺时针为正,逆时针为负; 5、光轴与法线的夹角 :光轴以锐角方向转向法 线,顺时针为正,逆时针为负; 6、折射面之间的间隔:在折射系统中,d恒为正。
3:已知一个光学系统的结构参数,r = 36.48mm, n=1, n’=1.5163 l = - 240mm, y=20mm 已求出:l’=151.838mm,现求 β, y’ (横向放大率与像的大小)
l2 l'1 d1 ,l3 l'2 d 2 ......lk l'k 1 d k 1
当只关心物像位置且折射面很少时,用方法2较为 方便。如需知道一些中间量且折射面较多时,多 采用方法1。
第五节 球面反射镜
一.球面反射镜的物像位置
1 1 2 l' l r
实物成实像
三个放大率之间的关系:
第四节 共轴球面系统
※光学系统一般是轴对称的,有一条公共轴线, 称为光轴。这种系统被称为“共轴系统”
光轴
一个共轴球面系统的结构参数由下列数值确定 (如有 k 个折射面):各个折射面的曲率半 径 r1 ,r2 ,r3 rk ;各个折射球面的顶点之间的间 隔 d1 , d 2 , d3 dk-1 。各球面间的介质折射 率 n1 , n2 , n3 nk+1 ,其中 nk+1 nk
(应用光学)2.8-2.16 理想光学系统的物像关系

应用光学(第四版)
2 共轴球面系统的物像关系 根据单个折射球面近轴范围内的放大率公式
y' nl'
y n' l
当光线位在近轴范围内时:
u h l
由以上二式得
由此得到
u h l
u' h l'
u l' u' l
nuy n' u' y'
应用光学(第四版)
2 共轴球面系统的物像关系
以上是单个折射球面物像空间存在的关系。对于由多个球面组成的共轴 系统来说有
B’
实物成等大倒立实像,位于二倍像方焦点上。分立两侧
应用光学(第四版)
2 共轴球面系统的物像关系
(c)物在二倍焦距之内,一倍焦距之外
B 2F A F
H H’ F ’
A’ 2F ’
B’
• 成放大倒立实像,像在二倍焦距外两侧
应用光学(第四版)
2 共轴球面系统的物像关系
(d)物在焦平面上
B
A
2F
F
H H’ F ’
应用光学(第四版)
2 共轴球面系统的物像关系
节点性质: 凡过物方节点J的光线, 其出射光线必过像方节点J’, 并且和入射光线相平行。
应用光学(第四版)
2 共轴球面系统的物像关系
节点位置 根据角放大率公式, x f
f ' x'
将γ=1代入,即可找到节点位置 x f 1
f ' x'
因此对节点J、J'有:
角放大率等于:
tgU' u'
tgU u
得 n tgU y n'tgU'y'
这就是理想光学系统的物像关系不变式。
2 共轴球面系统的物像关系 根据单个折射球面近轴范围内的放大率公式
y' nl'
y n' l
当光线位在近轴范围内时:
u h l
由以上二式得
由此得到
u h l
u' h l'
u l' u' l
nuy n' u' y'
应用光学(第四版)
2 共轴球面系统的物像关系
以上是单个折射球面物像空间存在的关系。对于由多个球面组成的共轴 系统来说有
B’
实物成等大倒立实像,位于二倍像方焦点上。分立两侧
应用光学(第四版)
2 共轴球面系统的物像关系
(c)物在二倍焦距之内,一倍焦距之外
B 2F A F
H H’ F ’
A’ 2F ’
B’
• 成放大倒立实像,像在二倍焦距外两侧
应用光学(第四版)
2 共轴球面系统的物像关系
(d)物在焦平面上
B
A
2F
F
H H’ F ’
应用光学(第四版)
2 共轴球面系统的物像关系
节点性质: 凡过物方节点J的光线, 其出射光线必过像方节点J’, 并且和入射光线相平行。
应用光学(第四版)
2 共轴球面系统的物像关系
节点位置 根据角放大率公式, x f
f ' x'
将γ=1代入,即可找到节点位置 x f 1
f ' x'
因此对节点J、J'有:
角放大率等于:
tgU' u'
tgU u
得 n tgU y n'tgU'y'
这就是理想光学系统的物像关系不变式。
第二章球面和共轴球面系统分析

要讨论成像规律,即像的虚实,成像的位置、正倒和大 小问题,必须计算出光线的走向,所以我们先讨论计算公式。 光线经过单个折射球面的情况如图所示。 包含光轴和物点的平面称为含轴面(纸面)或子午面。 计算的目的:光从何处来,经何处到哪里去(由此得出由物 点发出的光线经过系统后能否交到一点完善成像)?
首要问题:用什么量(怎样)来决定光线在空间中的位置?
对AEC应用正弦定理得 L r r Lr 即 sin I sin U 可求出I sin I sin ( U) r n 据折射定律 sin I ` sin I 可求出I ` n` 对AEC和A`EC应用外角定理 U I U ` I ` U ` U I I ` 可得到U ` sin I ' sin U ' sin I 在A ' EC中 ,利用正弦定律 L ' rr L ' r r sin U
从光轴起算,光轴转向光线(按锐角方向), 顺时针为正,逆时针为负。
入射角、折射角 从光线起算,光线转向法线(按锐角方向), 顺时针为正,逆时针为负。 ③ 光轴与法线的夹角(如) 从光轴起算,光轴转向法线(按锐角方向), 顺时针为正,逆时针为负。
二、实际光线经过单个折射球面的光路计算
已知:折射球面曲率半径r,介质折射率n和n′,及物方坐标L和U。 求:像方L ′和 U ′。
共轴球面系统由许多单个球面构成,当计算出第一面后, 其折射光线就是第二面的入射光线。
U 2 U1; L2 L1 d1
再由相邻两折射球面间的关系,求出下一个球面的折 射光线。
第四节 球面反射镜成像
n n n n 成像公式: l l r
n n
1 1 2 l l r
首要问题:用什么量(怎样)来决定光线在空间中的位置?
对AEC应用正弦定理得 L r r Lr 即 sin I sin U 可求出I sin I sin ( U) r n 据折射定律 sin I ` sin I 可求出I ` n` 对AEC和A`EC应用外角定理 U I U ` I ` U ` U I I ` 可得到U ` sin I ' sin U ' sin I 在A ' EC中 ,利用正弦定律 L ' rr L ' r r sin U
从光轴起算,光轴转向光线(按锐角方向), 顺时针为正,逆时针为负。
入射角、折射角 从光线起算,光线转向法线(按锐角方向), 顺时针为正,逆时针为负。 ③ 光轴与法线的夹角(如) 从光轴起算,光轴转向法线(按锐角方向), 顺时针为正,逆时针为负。
二、实际光线经过单个折射球面的光路计算
已知:折射球面曲率半径r,介质折射率n和n′,及物方坐标L和U。 求:像方L ′和 U ′。
共轴球面系统由许多单个球面构成,当计算出第一面后, 其折射光线就是第二面的入射光线。
U 2 U1; L2 L1 d1
再由相邻两折射球面间的关系,求出下一个球面的折 射光线。
第四节 球面反射镜成像
n n n n 成像公式: l l r
n n
1 1 2 l l r
1.2.2球面和共轴球面系统的理想成像

n' l'
n l
n' - n r
OF1
=
f
=
-
n'r n' -n
l
1.4单球面的焦距和焦度
1.4.3在单球面的高斯公式 中 ,
n' - n
是一个表征球面光学特性的量,叫单折射球面的
r
屈光力,也称光焦度,简称焦度,用字母F表示,其单位是屈光度,符号是D。1屈光度定义为在
空气中焦距为1m的单折射球面的屈光力。1屈光度=100度
3. 理想(高斯)光学系统
N
N'
3.3理想光学系统的物像关系
3.3.1作图法求像
(1)厚透镜的成像作图
A
B
3. 理想(高斯)光学系统
B' A'
3.3理想光学系统的物像关系
3.3.1作图法求像
(2)薄透镜的成像作图
3. 理想(高斯)光学系统
A' B'
3.3理想光学系统的物像关系
3.3.1作图法求像
第一章 几何光学相关基础知识
单折射球面成像和共轴球面系统的理想成像
共轴球面系统与单折射球面
共轴球面系统由多个单折射球面 构成
1.单折射球面的成像
• 光轴AA' • 子午面(无数个) • 物距OA • 像距OA' • 物方孔径角∠EAO或U • 像方孔径角∠EA'O或U'
1.1单折射球面的相关术语
(2)薄透镜的成像作图
3. 理想(高斯)光学系统
B' A'
3.3理想光学系统的物像关系
3.3.2公式法求像
(1)牛顿公式 pp’=ff’ β=y’/y=- f/p=-p’/f’ (2)高斯公式 N’/l’-n/l=n’/f’ β=nl’/n’l
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2019/5/22
yy
54
n
n'
F
H
UJ
xH = - f xJ = f '
H'
UJ '
F'
J J'
xJ' = f xH' = - f '
2019/5/22
yy
55
节面(Nodal Planes)
分为物方节平面(也称前节面)和 像方节平面(也称后节面)。
2019/5/22
yy
56
过节点的光线 平行出射
yy
22
概 念
5、屈光力(光焦度)F
光焦度表征光学系统偏折光线的能力。
光焦度F (-)表起发散作用 (+)表示起 会聚作用
单位:屈光度D——以米为单位的焦距的倒 数。
2019/5/22
yy
23
眼镜的度数=屈光度数×100
2019/5/22
yy
24
二、转面(过渡)公式:
1
2019/5/22
于是,高斯公式可表示为 V′– V = F
即光学系统的光焦度等于一对共轭点之间的光 束会聚度之差值,单位为屈光度(D)。
2019/5/22
yy
66
光学系统的光焦度:
光学系统中折合焦距的倒数 以F 表示,也称屈光力或焦度或度数
n' n F= =-
f' f
2019/5/22
yy
67
在空气中,n′= n = 1,此时,光焦度则是
yy
29
演示一下
2019/5/22
yy
30
这里F与F’是不是共轭点呢?
2019/5/22
yy
31
2、主点与主平面(Principal Planes)
横向放大率为+1的一对共轭平面称为主平面, 其和光轴的交点称为主点, 分别用H、H′表示物方主点和像方主点。
2019/5/22
yy
32
演示一下
2019/5/22
B
B′
H'
F
A
F′ A′
H
UH
UH '
2019/5/22
yy
61
三条主光线4
B
A'
H
H'
F'
N
N'
F
A
B'
2019/5/22
yy
62
五、 光学系统的光焦度和 光束的聚散度
定义: 一线段与所在介质的折射率之比值为此线段
在该介质中的折合距离, l / n 、 l ' / n'
f ' / n' 称为光学系统的折合焦距。
yy
25
三、理想光学系统
把近轴区成完善像的范围扩大到整个 光学系统的任意空间;
即当任意大范围的物体以任意宽的光 束经光学系统后均能成完善像的光学系统。
2019/5/22
yy
26
理想光学系统的性质
一一对应
⑴一物点成像后仍为一像点 ⑵一直线成像后仍为一直线 ⑶一平面成像后仍为一平面
物像互为共轭
2019/5/22
2019/5/22
yy
52
三种放大率之间的关系:
n’
n
= 2 ; =
n
n’
=
2019/5/22
yy
53
四、 光学系统的节点和节平面
节点(Nodal Points)
——光学系统中一对角放大率为+1的特 殊共轭点 分为物方节点(前节点)和 像方节点 (后节点) 分别以N、N ’表示。
〈讨论〉
① β<0: 表示成倒像;此时l 与l ′必异号,即物、
像分居折射面两侧,像的虚实与物一致;
② β>0: 表示成正像,此时l 与l ′同号,即物、
像同侧,像的虚实与物相反; ③ β>1:表示成放大像;β<1:表示成缩小像。
(绝对值)
2019/5/22
yy
19
4、单折射球面的前、后焦点和焦距:
2019/5/22
yy
20
单折射球面的前、后焦点和焦距:
n
n′
F
O
F′
-f
f′
2019/5/22
yy
21
单折射球面的焦距及两焦距间的关系:
n′r
像方焦距: f ′=
n′- n nr
物方焦距: f = -
n′- n 两焦距间的关系:
n′/ f ′= - n / f = F f ′+ f = r
例
2019/5/22
2019/5/22
yy
69
Q
Q'
A
H H'
A'
-l
R R' l'
这里F > 0 : V < 0 ; V ' > 0
2019/5/22
yy
70
2019/5/22
yy
71
镜片的顶镜度:
此即为顶焦距的倒数,其单位与光焦度 的单位相同,都是屈光度(D)。
2019/5/22
yy
72
六、两个光组的组合
两个有一定焦距的光组组合, 系统的总焦距或光焦度除与各自的光焦度有关外 还与其间隔 d 有关
2019/5/22
yy
73
2019/5/22
yy
74
第二节 球面和共轴球 面系统的理想成像
2019/5/22
yy
1
2019/5/22
yy
2
一、单折射球面成像
E i
B
y -u
i׳ h
u׳
A
OD
C
r
-l
l׳
2019/5/22
五条线段 四个角度
yy
A׳ y
B׳
3
1、 符号规则
线段:
1. 坐标方向: 横坐标自左向右为正,反之为负。 纵坐标由下向上为正,反之为负。
y -u
A
E i
i׳ h
OD
C
r
u׳
A׳
y
B׳
-l
l׳
2019/5/22
yy
16
2、单球面近轴区的物像放大率:
2019/5/22
yy
17
1)横向放大率:
即像高与物高之比,其定义式为:
y′ β=
y
应用相似三角形原理,可求得
y′ n l′
β= =
y
n’ l
2019/5/22
yy
18
这表明近轴光线所成的像是完善的。
通常把近轴光线所成的像点称为“高斯像点”。
通过高斯像点而垂直于光轴的像面称为“高斯像面”。
2019/5/22
yy
13
2019/5/22
yy
14
1、常用的物像共轭位置关系式:
高
n′ n -
l′ l
n′- n =
r
斯 公
式
注:线段单位 米
2019/5/22
yy
15
B
方法一
B
F
H
H'
F' A'
A
B'
2019/5/22
yy
38
1、
B
A
H F
H'
F' A'
B'
2019/5/22
yy
39
2、
B′
B
H
H′
F′
A′
FA
2019/5/22
yy
40
3、 B
B′
H H′
F
A
F′ A′
2019/5/22
yy
41
4、 B
B′
H
H′
F
A′ F′ A
2019/5/22
yy
42
5、 B
A′
H
H′
F′
F
A
B′
2019/5/22
yy
43
轴上点成像作图
A F H H′ F′
A′
A F H H′ F′
2019/5/22
yy
A′
44
2、解析法求像
1、牛顿公式
定量计算
公式中的物距 p和像距 p' 分别以物方焦点 F和像方焦点F'为原点,其与光线传播方
向相同者为正。
2019/5/22
yy
45
y' f
p'
β= =- =-
y
p f'
或为
l' f n l' β=- =
l f ' n' l
2019/5/22
yy
48
2、轴向放大率
当物点A沿光轴有一微量移动 dx 或 dl 时, 其像点A′相应地移动距离dx′或 dl′,
则轴向放大率定义为
或为
dp′
α=
dp
dl′
α=
dl
2019/5/22
yy
49
轴向放大率——像与物沿轴移动量之比
2019/5/22
yy
50
3、角放大率 γ
像方、物方倾斜角的正切之比
tgU′
γ=
tgU
将 tgU′= h/l ′ ; tgU = h/l 代入上式,得
l
γ=
l'