奥本海姆《信号与系统(第二版)》习题参考答案
资料-奥本海姆信号与系统上册2版课后答案

1答案习题1.1用笛卡儿坐标形式(x+yj)表示下列复数。
解:利用欧拉公式:和复平面性质,有:,,1.2用极坐标形式(re jθ,-π<θ≤π)表示下列复数。
解:根据,有:1.3对下列每一个信号求P∞和E∞。
解:(a)(b)(c)(d)(e)(f)1.1设n<-2和n>4时x[n]=0,对以下每个信号确定其值保证为零的n值。
解:(a)x[n-3]=0,n-3<-2或n-3>4,即x[n-3]=0,n<1或n>7(b)x[n+4]=0,n+4<-2或n+4>4,即x[n+4]=0,n<-6或,n>0(c)x[-n]=0,-n<-2或-n>4,即x[-n]=0,n<-4或n>2(d)x[-n+2]=0,-n+2<-2或-n+2>4,即x[-n+2]=0,n<-2或n>4(e)x[-n-2]=0,-n-2<-2或-n-2>4,即x[-n-2]=0,,n<-6或n>01.2设t<3时x(t)=0,确定以下每个信号的值保证为零的t值。
解:(a)x(1-t)=0,1-t<3,即x(1-t)=0,t>-2(b)x(1-t)+x(2-t)=0,1-t<3且2-t<3,即x(1-t)+z(2-t)=0,t>-1(c)x(1-t)x(2-t)=0,1-t<3或2-t<3,即x(1-t)x(2-t)=0,t>-2(d)x(3t)=0,3t<3,即x(3t)=0,t<1(e)x(t/3)=0,t/3<3,即x(t/3)=0,t<91.3判断下列信号的周期性。
解:(a)由于对于-∞<t<∞,x1(t)的值不具备重复性,所以x1(t)不是周期信号。
(b)由于所以x2[n]也不具备周期性。
(c)由于所以x3[n]是基波周期为4的周期序列。
1.4对以下每个信号求信号的偶部保证为零的所有自变量值。
解:(a)只有当|n|>3时,(b)即对一切t,(c)所以当|n|<3及|n|→∞时,(d),由于所以只有当|t|→∞时,1.5将下列信号的实部表示成的形式,其中A,a,ω和都是实数,A>0且-π<≤π。
奥本海姆信号与系统(第二版)复习题参考答案

第一章作业解答1.9解:(b )jt t t j e e e t x --+-==)1(2)(由于)()(2)1()1())(1(2t x e e e T t x T j t j T t j ≠==++-+-++-,故不是周期信号;(或者:由于该函数的包络随t 增长衰减的指数信号,故其不是周期信号;) (c )n j e n x π73][= 则πω70= 7220=ωπ是有理数,故其周期为N=2; 1.12解:]4[1][1)1(]1[1][43--=--==+---=∑∑∞=∞=n u m n mk k n n x m k δδ-3 –2 –1 0 1 2 3 4 5 6 n1…减去:-3 –2 –1 0 1 2 3 4 5 6 nu[n-4]等于:-3 –2 –1 0 1 23 4 5 6 n…故:]3[+-n u 即:M=-1,n 0=-3。
1.14解:x(t)的一个周期如图(a)所示,x(t)如图(b)所示:而:g(t)如图(c)所示……dtt dx )(如图(d )所示:……故:)1(3)(3)(--=t g t g dtt dx 则:1t ,0t 3,32121==-==;A A 1.15解:该系统如下图所示: 2[n](1)]4[2]3[5]2[2]}4[4]3[2{21]}3[4]2[2{]3[21]2[][][1111111222-+-+-=-+-+-+-=-+-==n x n x n x n x n x n x n x n x n x n y n y即:]4[2]3[5]2[2][-+-+-=n x n x n x n y(2)若系统级联顺序改变,该系统不会改变,因为该系统是线性时不变系统。
(也可以通过改变顺序求取输入、输出关系,与前面做对比)。
1.17解:(a )因果性:)(sin )(t x t y =举一反例:当)0()y(,0int s x t =-=-=ππ则时输出与以后的输入有关,不是因果的;(b )线性:按照线性的证明过程(这里略),该系统是线性的。
信号与系统奥本海姆第二版答案

《国外电子与通信教材系列:信号与系统(第2版)》是美国麻省理工学院(MIT)的经典教材之一,讨论了信号与系统分析的基本理论、基本分析方法及其应用。
全书共分11章,主要讲述了线性系统的基本理论、信号与系统的基本概念、线性时不变系统、连续与离散信号的傅里叶表示、傅里叶变换以及时域和频域系统的分析方法等内容。
作者使用了大量在滤波、采样、通信和反馈系统中的实例,并行讨论了连续系统、离散系统、时域系统和频域系统的分析方法,使读者能透彻地理解各种信号系统的分析方法并比较其异同。
上册:
下册。
信号与系统_第二版_奥本海默 _课后答案[1-10章]
![信号与系统_第二版_奥本海默 _课后答案[1-10章]](https://img.taocdn.com/s3/m/6ff45c8f83c4bb4cf6ecd112.png)
学霸助手[]-课后答案|期末试卷|复习提纲
学霸h助us手 Contents baz Chapter 1 ······················································· 2 xue Chapter 2 ······················································· 17
e 5 = 5 j0 ,
e -2 = 2 ,jp
e -3 j = 3
-
j
p 2
e 1
2
-
j
3 2
=
, -
j
p 2
e 1+ j =
2
, j
p 4
( ) 1- j e 2 =2
-
j
p 2
ep
j(1- j) = 4 ,
e 1+
1-
j j
=
p 4
e 2 + j 2 = -1p2
1+ j 3
ò e 1.3.
(a)
xue学ba霸zh助usS手hoiug.ncoaml(Sseco&nd EdSitioyn)stems
—Learning Instructions
xu(eEbxe学arzc霸hisue助sshA手onus.wceorms)
Department
of
Computer 2005.12
Enginexeurein学bga霸zh助us手
=¥
E¥
0
-4tdt
=
1 4
,
P ¥ =0, because
E¥ < ¥
手 om ò (b)
x e , 2(t) = j(2t+p4 )
奥本海姆《信号与系统(第二版)》习题参考答案
第一章作业解答解:(b )jt t t j e e e t x --+-==)1(2)(由于)()(2)1()1())(1(2t x e e e T t x T j t j T t j ≠==++-+-++-,故不是周期信号;(或者:由于该函数的包络随t 增长衰减的指数信号,故其不是周期信号;) (c )n j e n x π73][= 则πω70= 7220=ωπ是有理数,故其周期为N=2;解:]4[1][1)1(]1[1][43--=--==+---=∑∑∞=∞=n u m n mk k n n x m k δδ-3 –2 –1 0 1 2 3 4 5 6 n1…减去:-3 –2 –1 0 1 2 3 4 5 6 nu[n-4]等于:-3 –2 –1 0 1 2 34 5 6 n…故:]3[+-n u 即:M=-1,n 0=-3。
解:x(t)的一个周期如图(a)所示,x(t)如图(b)所示:而:g(t)如图(c)所示……dtt dx )(如图(d )所示:……故:)1(3)(3)(--=t g t g dtt dx 则:1t ,0t 3,32121==-==;A A 1.15解:该系统如下图所示: 2[n](1)]4[2]3[5]2[2]}4[4]3[2{21]}3[4]2[2{]3[21]2[][][1111111222-+-+-=-+-+-+-=-+-==n x n x n x n x n x n x n x n x n x n y n y即:]4[2]3[5]2[2][-+-+-=n x n x n x n y(2)若系统级联顺序改变,该系统不会改变,因为该系统是线性时不变系统。
(也可以通过改变顺序求取输入、输出关系,与前面做对比)。
解:(a )因果性:)(sin )(t x t y =举一反例:当)0()y(,0int s x t =-=-=ππ则时输出与以后的输入有关,不是因果的;(b )线性:按照线性的证明过程(这里略),该系统是线性的。
信号与系统 奥本海姆 第二版 习题详解

对方程两边同时做反变换得:
y[n] −
1 处有一个二阶极点,因为系统是因果的,所以 H ( z ) 的收敛域是 z > , (b)H ( z) 在 z = 1 3 3 包括单位圆,所以系统是稳定的。
解: (a) x[n] = δ [n + 5] ← → X ( z ) = z , ROC : 全部z 因为收敛域包括单位圆,所以傅立叶变换存在。
( )
χ (s ) = uL{e −2t u (t )} =
H (s ) =
H (s )如图所示。
Y (s ) 1 = 2 . X (s ) s − s − 2
1 1 1 3 3 ( ) , ⇒ H s = − s2 − s − 2 s − 2 s +1 (i )如果系统是稳定的,H (s )的ROC为 − 1〈ℜe {s}〈2.
∞ ∞
n =−∞
∑
∞
x[n]z − n =
− n−2
1 −n ∞ 1 n z = ∑− z ∑ −3 3 n =−∞ n =2
−2 n −n
z n + 2 = 9 z 2 /(1 + 3z ) = 3z /(1 + (1/ 3) z −1 ), z < 1 3 1 = ∑ n =2 3
1 1 (b) H (s) = 1 − 3 s − 2 s +1
(1)系统是稳定的,说明 H (s) 的收敛域应该包括虚轴在内,即: − 1 < Re{s} < 2 , 所以 h(t ) = 1 (− e u (−t ) − e u (t )) 3 (2)系统是因果的,则 H (s) 的收敛域应为 Re{s} > 2 ,所以 h(t ) = 1 (e u (t ) − e u (t )) 3 ( 3 ) 系 统 既 不 因 果 又 不 稳 定 , 则 H (s) 的 收 敛 域 应 为 Re{s} < −1 , 所 以
信号与系统奥本海姆第二版课后答案
信号与系统 奥本海姆第二版 习题解答Department of Computer Engineering2005.12ContentsChapter 1 (2)Chapter 2 (17)Chapter 3 (35)Chapter 4 (62)Chapter 5 (83)Chapter 6 (109)Chapter 7 (119)Chapter 8 (132)Chapter 9 (140)Chapter 10 (160)Chapter 1 Answers1.1 Converting from polar to Cartesian coordinates:111cos 222j eππ==- 111c o s ()222j e ππ-=-=- 2cos()sin()22jj j eπππ=+=2c o s ()s i n ()22jjj eπππ-=-=- 522j jj eeππ==4c o s ()s i n ())144jjj πππ+=+9441j jj ππ=-9441j j j ππ--==-41jj π-=-1.2 055j=, 22j e π-=,233jj e π--=212je π--=, 41j j π+=, ()2221jj eπ-=-4(1)j je π-=, 411j je π+=-12e π-1.3. (a) E ∞=4014tdt e∞-=⎰, P ∞=0, because E ∞<∞ (b) (2)42()j t t x eπ+=, 2()1t x =.Therefore, E ∞=22()dt t x +∞-∞⎰=dt +∞-∞⎰=∞,P ∞=211limlim222()TTTTT T dt dt TTt x --→∞→∞==⎰⎰lim11T →∞=(c) 2()t x =cos(t). Therefore, E ∞=23()dt t x +∞-∞⎰=2cos()dt t +∞-∞⎰=∞, P ∞=2111(2)1lim lim 2222cos()TTTTT T COS t dt dt T Tt --→∞→∞+==⎰⎰(d)1[][]12nn u n x =⎛⎫ ⎪⎝⎭,2[]11[]4nu n n x =⎛⎫ ⎪⎝⎭. Therefore, E ∞=24131[]4nn n x +∞∞-∞===⎛⎫∑∑ ⎪⎝⎭P ∞=0,because E ∞<∞.(e) 2[]n x =()28n j e ππ-+,22[]n x =1. therefore, E ∞=22[]n x +∞-∞∑=∞,P ∞=211limlim1122121[]NNN N n Nn NN N n x →∞→∞=-=-==++∑∑.(f) 3[]n x =cos 4nπ⎛⎫ ⎪⎝⎭. Therefore, E ∞=23[]n x +∞-∞∑=2cos()4n π+∞-∞∑=2cos()4n π+∞-∞∑,P ∞=1limcos 214nNN n NN π→∞=-=+⎛⎫∑ ⎪⎝⎭1cos()112lim ()2122NN n Nn N π→∞=-+=+∑ 1.4. (a) The signal x[n] is shifted by 3 to the right. The shifted signal will be zero for n<1, And n>7. (b) The signal x[n] is shifted by 4 to the left. The shifted signal will be zero for n<-6. And n>0. (c) The signal x[n] is flipped signal will be zero for n<-1 and n>2.(d) The signal x[n] is flipped and the flipped signal is shifted by 2 to the right. The new Signal will be zero for n<-2 and n>4.(e) The signal x[n] is flipped and the flipped and the flipped signal is shifted by 2 to the left. This new signal will be zero for n<-6 and n>0.1.5. (a) x(1-t) is obtained by flipping x(t) and shifting the flipped signal by 1 to the right. Therefore, x (1-t) will be zero for t>-2. (b) From (a), we know that x(1-t) is zero for t>-2. Similarly, x(2-t) is zero for t>-1, Therefore, x (1-t) +x(2-t) will be zero for t>-2. (c) x(3t) is obtained by linearly compression x(t) by a factor of3. Therefore, x(3t) will be zero for t<1.(d) x(t/3) is obtained by linearly compression x(t) by a factor of 3. Therefore, x(3t) will bezero for t<9.1.6(a) x1(t) is not periodic because it is zero for t<0.(b) x2[n]=1 for all n. Therefore, it is periodic with a fundamental period of 1.(c) x3[n1.7. (a)()1[]vnxε={}1111[][]([][4][][4])22n n u n u n u n u nx x+-=--+----Therefore, ()1[]vnxεis zero for1[]nx>3.(b) Since x1(t) is an odd signal, ()2[]vnxεis zero for all values of t.(c)(){}11311[][][][3][3]221122vn nn n n u n u nx x xε-⎡⎤⎢⎥=+-=----⎢⎥⎢⎥⎣⎦⎛⎫⎛⎫⎪ ⎪⎝⎭⎝⎭Therefore, ()3[]vnxεis zero when n<3 and when n→∞.(d) ()1554411()(()())(2)(2)22vt tt t t u t u tx x x e eε-⎡⎤=+-=---+⎣⎦Therefore, ()4()vtxεis zero only when t→∞.1.8. (a) ()01{()}22cos(0)tt tx eπℜ=-=+(b) ()02{()}cos()cos(32)cos(3)cos(30)4tt t t tx eππℜ=+==+(c) ()3{()}sin(3)sin(3)2t tt t tx e eππ--ℜ=+=+(d) ()224{()}sin(100)sin(100)cos(100)2t t tt t t tx e e eππ---ℜ=-=+=+1.9. (a)1()tx is a periodic complex exponential.101021()j t j tt jx e eπ⎛⎫+⎪⎝⎭==(b)2()tx is a complex exponential multiplied by a decaying exponential. Therefore,2()tx is not periodic.(c)3[]nx is a periodic signal. 3[]n x=7j neπ=j neπ.3[]nx is a complex exponential with a fundamental period of 22ππ=.(d)4[]nx is a periodic signal. The fundamental period is given by N=m(23/5ππ)=10().3mBy choosing m=3. We obtain the fundamental period to be 10.(e)5[]nx is not periodic. 5[]nx is a complex exponential with 0w=3/5. We cannot find any integer m such that m(2wπ) is also an integer. Therefore,5[]nxis not periodic.1.10. x(t)=2cos(10t+1)-sin(4t-1)Period of first term in the RHS =2105ππ=.Period of first term in the RHS =242ππ=.Therefore, the overall signal is periodic with a period which the least commonmultiple of the periods of the first and second terms. This is equal toπ.1.11. x[n] = 1+74j n e π−25j n e πPeriod of first term in the RHS =1. Period of second term in the RHS =⎪⎭⎫ ⎝⎛7/42π=7 (when m=2)Period of second term in the RHS =⎪⎭⎫ ⎝⎛5/22ππ=5 (when m=1)Therefore, the overall signal x[n] is periodic with a period which is the least common Multiple of the periods of the three terms inn x[n].This is equal to 35.1.12. The signal x[n] is as shown in figure S1.12. x[n] can be obtained by flipping u[n] and thenShifting the flipped signal by 3 to the right. Therefore, x[n]=u[-n+3]. This implies that M=-1 and no=-3.1.13y (t)=⎰∞-tdt x )(τ =dt t))2()2((--+⎰∞-τδτδ=⎪⎩⎪⎨⎧>≤≤--<2,022,12,0,t t tTherefore ⎰-==∞224d t E∑∑∞-∞=∞-∞=----=k k k t k t t g 12(3)2(3)(δδ)This implies that A 1=3, t 1=0, A 2=-3, and t 2=1.1.15 (a) The signal x 2[n], which is the input to S 2, is the same as y 1[n].Therefore ,y 2[n]= x 2[n-2]+21x 2[n-3] = y 1[n-2]+ 21y 1[n-3]=2x 1[n-2] +4x 1[n-3] +21( 2x 1[n-3]+ 4x 1[n-4]) =2x 1[n-2]+ 5x 1[n-3] + 2x 1[n-4] The input-output relationship for S isy[n]=2x[n-2]+ 5x [n-3] + 2x [n-4](b) The input-output relationship does not change if the order in which S 1and S 2 are connected series reversed. . We can easily prove this assuming that S 1 follows S 2. In this case , the signal x 1[n], which is the input to S 1 is the same as y 2[n].Therefore y 1[n] =2x 1[n]+ 4x 1[n-1]= 2y 2[n]+4 y 2[n-1]=2( x 2[n-2]+21 x 2[n-3] )+4(x 2[n-3]+21x 2[n-4]) =2 x 2[n-2]+5x 2[n-3]+ 2 x 2[n-4]The input-output relationship for S is once againy[n]=2x[n-2]+ 5x [n-3] + 2x [n-4]1.16 (a)The system is not memory less because y[n] depends on past values of x[n].(b)The output of the system will be y[n]= ]2[][-n n δδ=0(c)From the result of part (b), we may conclude that the system output is always zero for inputs of the form ][k n -δ, k ∈ ґ. Therefore , the system is not invertible .1.17 (a) The system is not causal because the output y(t) at some time may depend on future values of x(t). For instance , y(-π)=x(0).(b) Consider two arbitrary inputs x 1(t)and x 2(t).x 1(t) →y 1(t)= x 1(sin(t)) x 2(t) → y 2(t)= x 2(sin(t))Let x 3(t) be a linear combination of x 1(t) and x 2(t).That is , x 3(t)=a x 1(t)+b x 2(t)Where a and b are arbitrary scalars .If x 3(t) is the input to the given system ,then the corresponding output y 3(t) is y 3(t)= x 3( sin(t))=a x 1(sin(t))+ x 2(sin(t)) =a y 1(t)+ by 2(t)Therefore , the system is linear.1.18.(a) Consider two arbitrary inputs x 1[n]and x 2[n].x 1[n] → y 1[n] =][01k x n n n n k ∑+-=x 2[n ] → y 2[n] =][02k x n n n n k ∑+-=Let x 3[n] be a linear combination of x 1[n] and x 2[n]. That is :x 3[n]= ax 1[n]+b x 2[n]where a and b are arbitrary scalars. If x 3[n] is the input to the given system, then the corresponding outputy 3[n] is y 3[n]=][03k x n n n n k ∑+-==])[][(2100k bx k ax n n n n k +∑+-==a ][001k x n n n n k ∑+-=+b ][02k x n n n n k ∑+-== ay 1[n]+b y 2[n]Therefore the system is linear.(b) Consider an arbitrary input x 1[n].Lety 1[n] =][01k x n n n n k ∑+-=be the corresponding output .Consider a second input x 2[n] obtained by shifting x 1[n] in time:x 2[n]= x 1[n-n 1]The output corresponding to this input isy 2[n]=][02k x n n n n k ∑+-== ]n [1100-∑+-=k x n n n n k = ][01011k x n n n n n n k ∑+---=Also note that y 1[n- n 1]=][01011k x n n n n n n k ∑+---=.Therefore , y 2[n]= y 1[n- n 1] This implies that the system is time-invariant.(c) If ][n x <B, then y[n]≤(2 n 0+1)B. Therefore ,C ≤(2 n 0+1)B.1.19 (a) (i) Consider two arbitrary inputs x 1(t) and x 2(t). x 1(t) → y 1(t)= t 2x 1(t-1)x 2(t) → y 2(t)= t 2x 2(t-1)Let x 3(t) be a linear combination of x 1(t) and x 2(t).That is x 3(t)=a x 1(t)+b x 2(t)where a and b are arbitrary scalars. If x 3(t) is the input to the given system, then the corresponding output y 3(t) is y 3(t)= t 2x 3 (t-1)= t 2(ax 1(t-1)+b x 2(t-1))= ay 1(t)+b y 2(t)Therefore , the system is linear.(ii) Consider an arbitrary inputs x 1(t).Let y 1(t)= t 2x 1(t-1)be the corresponding output .Consider a second input x 2(t) obtained by shifting x 1(t) in time:x 2(t)= x 1(t-t 0)The output corresponding to this input is y 2(t)= t 2x 2(t-1)= t 2x 1(t- 1- t 0)Also note that y 1(t-t 0)= (t-t 0)2x 1(t- 1- t 0)≠ y 2(t) Therefore the system is not time-invariant.(b) (i) Consider two arbitrary inputs x 1[n]and x 2[n]. x 1[n] → y 1[n] = x 12[n-2]x 2[n ] → y 2[n] = x 22[n-2].Let x 3(t) be a linear combination of x 1[n]and x 2[n].That is x 3[n]= ax 1[n]+b x 2[n]where a and b are arbitrary scalars. If x 3[n] is the input to the given system, then the corresponding output y 3[n] is y 3[n] = x 32[n-2]=(a x 1[n-2] +b x 2[n-2])2=a 2x 12[n-2]+b 2x 22[n-2]+2ab x 1[n-2] x 2[n-2]≠ ay 1[n]+b y 2[n]Therefore the system is not linear.(ii) Consider an arbitrary input x 1[n]. Let y 1[n] = x 12[n-2]be the corresponding output .Consider a second input x 2[n] obtained by shifting x 1[n] in time:x 2[n]= x 1[n- n 0]The output corresponding to this input isy 2[n] = x 22[n-2].= x 12[n-2- n 0]Also note that y 1[n- n 0]= x 12[n-2- n 0] Therefore , y 2[n]= y 1[n- n 0] This implies that the system is time-invariant.(c) (i) Consider two arbitrary inputs x 1[n]and x 2[n].x 1[n] →y 1[n] = x 1[n+1]- x 1[n-1] x 2[n ]→y 2[n] = x 2[n+1 ]- x 2[n -1]Let x 3[n] be a linear combination of x 1[n] and x 2[n]. That is :x 3[n]= ax 1[n]+b x 2[n]where a and b are arbitrary scalars. If x 3[n] is the input to the given system, then the corresponding output y 3[n] is y 3[n]= x 3[n+1]- x 3[n-1]=a x 1[n+1]+b x 2[n +1]-a x 1[n-1]-b x 2[n -1]=a(x 1[n+1]- x 1[n-1])+b(x 2[n +1]- x 2[n -1])= ay 1[n]+b y 2[n]Therefore the system is linear.(ii) Consider an arbitrary input x 1[n].Let y 1[n]= x 1[n+1]- x 1[n-1]be the corresponding output .Consider a second input x 2[n] obtained by shifting x 1[n] in time: x 2[n]= x 1[n-n 0]The output corresponding to this input isy 2[n]= x 2[n +1]- x 2[n -1]= x 1[n+1- n 0]- x 1[n-1- n 0] Also note that y 1[n-n 0]= x 1[n+1- n 0]- x 1[n-1- n 0] Therefore , y 2[n]= y 1[n-n 0] This implies that the system is time-invariant.(d) (i) Consider two arbitrary inputs x 1(t) and x 2(t).x 1(t) → y 1(t)= d O {}(t) x 1 x 2(t) → y 2(t)= {}(t) x 2d OLet x 3(t) be a linear combination of x 1(t) and x 2(t).That is x 3(t)=a x 1(t)+b x 2(t)where a and b are arbitrary scalars. If x 3(t) is the input to the given system, then the corresponding output y 3(t) is y 3(t)= d O {}(t) x 3={}(t) x b +(t) ax 21d O=a d O {}(t) x 1+b {}(t) x 2d O = ay 1(t)+b y 2(t)Therefore the system is linear.(ii) Consider an arbitrary inputs x 1(t).Lety 1(t)= d O {}(t) x 1=2)(x -(t) x 11t -be the corresponding output .Consider a second input x 2(t) obtained by shifting x 1(t) in time:x 2(t)= x 1(t-t 0)The output corresponding to this input isy 2(t)= {}(t) x 2d O =2)(x -(t) x 22t -=2)(x -)t -(t x 0101t t --Also note that y 1(t-t 0)= 2)(x -)t -(t x 0101t t --≠ y 2(t)Therefore the system is not time-invariant.1.20 (a) Givenx )(t =jt e 2 y(t)=t j e 3x )(t =jt e 2- y(t)=t j e 3- Since the system liner+=tj e t x 21(2/1)(jt e 2-))(1t y =1/2(tj e 3+tj e 3-)Thereforex 1(t)=cos(2t))(1t y =cos(3t)(b) we know thatx 2(t)=cos(2(t-1/2))= (j e -jte 2+je jt e 2-)/2Using the linearity property, we may once again writex 1(t)=21( j e -jt e 2+j e jte 2-))(1t y =(j e -jt e 3+je jte 3-)= cos(3t-1)Therefore,x 1(t)=cos(2(t-1/2)))(1t y =cos(3t-1)1.21.The signals are sketched in figure S1.21.1.24 The even and odd parts are sketched in Figure S1.24 1.25 (a) periodic period=2π/(4)= π/2 (b) periodic period=2π/(4)= 2(c) x(t)=[1+cos(4t-2π/3)]/2. periodic period=2π/(4)= π/2 (d) x(t)=cos(4πt)/2. periodic period=2π/(4)= 1/2 (e) x(t)=[sin(4πt)u(t)-sin(4πt)u(-t)]/2. Not period. (f) Not period.1.26 (a) periodic, period=7.(b) Not period.(c) periodic, period=8.(d) x[n]=(1/2)[cos(3πn/4+cos(πn/4)). periodic, period=8. (e) periodic, period=16. 1.27 (a) Linear, stable(b) Not period. (c) Linear(d) Linear, causal, stable(e) Time invariant, linear, causal, stable (f) Linear, stable(g) Time invariant, linear, causal 1.28 (a) Linear, stable(b) Time invariant, linear, causal, stable (c)Memoryless, linear, causal (d) Linear, stable (e) Linear, stable(f) Memoryless, linear, causal, stable (g) Linear, stable1.29 (a) Consider two inputs to the system such that[][][]{}111.S e x n y n x n −−→=ℜand [][][]{}221.Se x n y n x n −−→=ℜNow consider a third inputx3[n]=x2[n]+x 1[n]. The corresponding system outputWill be [][]{}[][]{}[]{}[]{}[][]33121212e e e e y n x n x n x n x n x n y n y n ==+=+=+ℜℜℜℜtherefore, we may conclude that the system is additive Let us now assume that inputs to the system such that [][][]{}/4111.Sj e x n y n e x n π−−→=ℜand[][][]{}/4222.Sj e x n y n e x n π−−→=ℜNow consider a third input x 3 [n]= x 2 [n]+ x 1 [n]. The corresponding system outputWill be[][]{}()[]{}()[]{}()[]{}()[]{}()[]{}()[]{}[]{}[]{}[][]/433331122/4/41212cos /4sin /4cos /4sin /4cos /4sin /4j e m e m e m e j j e e y n e x n n x n n x n n x n n x n n x n n x n e x n e x n y n y n πππππππππ==-+-+-=+=+ℜℜI ℜI ℜI ℜℜ therefore, we may conclude that the system is additive (b) (i) Consider two inputs to the system such that()()()()211111Sdx t x t y t x t dt ⎡⎤−−→=⎢⎥⎣⎦and ()()()()222211S dx t x t y t x t dt ⎡⎤−−→=⎢⎥⎣⎦ Now consider a third input x3[t]=x2[t]+x 1[t]. The corresponding system outputWill be()()()()()()()()()2333211111211dx t y t x t dt d x t x t x t x t dt y t y t ⎡⎤=⎢⎥⎣⎦⎡⎤+⎡⎤⎣⎦=⎢⎥+⎢⎥⎣⎦≠+ therefore, we may conclude that the system is not additiveNow consider a third input x 4 [t]= a x 1 [t]. The corresponding system output Will be()()()()()()()()2444211211111dx t y t x t dt d ax t ax t dt dx t a x t dt ay t ⎡⎤=⎢⎥⎣⎦⎡⎤⎡⎤⎣⎦=⎢⎥⎢⎥⎣⎦⎡⎤=⎢⎥⎣⎦=Therefore, the system is homogeneous.(ii) This system is not additive. Consider the fowling example .Let δ[n]=2δ[n+2]+2δ[n+1]+2δ[n] andx2[n]=δ[n+1]+ 2δ[n+1]+ 3δ[n]. The corresponding outputs evaluated at n=0 are [][]120203/2y andy ==Now consider a third input x 3 [n]= x 2 [n]+ x 1 [n].= 3δ[n+2]+4δ[n+1]+5δ[n]The corresponding outputs evaluated at n=0 is y 3[0]=15/4. Gnarly, y 3[0]≠ ]0[][21y y n +.This[][][][][]444442,1010,x n x n x n y n x n otherwise ⎧--≠⎪=-⎨⎪⎩[][][][][][]4445442,1010,x n x n ax n y n ay n x n otherwise ⎧--≠⎪==-⎨⎪⎩Therefore, the system is homogenous.1.30 (a) Invertible. Inverse system y(t)=x(t+4)(b)Non invertible. The signals x(t) and x 1(t)=x(t)+2πgive the same output (c) δ[n] and 2δ[n] give the same output d) Invertible. Inverse system; y(t)=dx(t)/dt(e) Invertible. Inverse system y(n)=x(n+1) for n ≥0 and y[n]=x[n] for n<0 (f) Non invertible. x (n) and –x(n) give the same result (g)Invertible. Inverse system y(n)=x(1-n) (h) Invertible. Inverse system y(t)=dx(t)/dt(i) Invertible. Inverse system y(n) = x(n)-(1/2)x[n-1] (j) Non invertible. If x(t) is any constant, then y(t)=0 (k) δ[n] and 2δ[n] result in y[n]=0 (l) Invertible. Inverse system: y(t)=x(t/2)(m) Non invertible x 1 [n]= δ[n]+ δ[n-1]and x 2 [n]= δ[n] give y[n]= δ[n] (n) Invertible. Inverse system: y[n]=x[2n]1.31 (a) Note that x 2[t]= x 1 [t]- x 1 [t-2]. Therefore, using linearity we get y 2 (t)= y 1 (t)- y 1 (t-2).this is shown in Figure S1.31(b)Note that x3 (t)= x1 [t]+ x1 [t+1]. .Therefore, using linearity we get Y3 (t)= y1 (t)+ y1 (t+2). this is2(4) y 2(t) periodic, period T; x(t) periodic, period T/2;1.33(1) True x[n]=x[n+N ]; y 1 (n)= y 1 (n+ N 0)i.e. periodic with N 0=n/2if N is even and with period N 0=n if N is odd.(2)False. y 1 [n] periodic does no imply x[n] is periodic i.e. Let x[n] = g[n]+h[n] where0,1,[][]0,(1/2),nn even n even g n and h n n odd n odd⎧⎧==⎨⎨⎩⎩ Then y 1 [n] = x [2n] is periodic but x[n] is clearly not periodic. (3)True. x [n+N] =x[n]; y 2 [n+N 0] =y 2 [n] where N 0=2N (4) True. y 2 [n+N] =y 2 [n]; y 2 [n+N 0 ]=y 2 [n] where N 0=N/2 1.34. (a) ConsiderIf x[n] is odd, x[n] +x [-n] =0. Therefore, the given summation evaluates to zero. (b) Let y[n] =x 1[n]x 2[n] .Theny [-n] =x 1[-n] x 2[-n] =-x 1[n]x 2[n] =-y[n]. This implies that y[n] is odd.(c)ConsiderUsing the result of part (b), we know that x e [n]x o [n] is an odd signal .Therefore, using the result of part (a) we may conclude thatTherefore,(d)ConsiderAgain, since x e (t) x o (t) is odd,Therefore,1.35. We want to find the smallest N 0 such that m(2π /N) N 0 =2πk or N 0 =kN/m,{}1[][0][][]n n x n x x n x n ∞∞=-∞==++-∑∑22[][]e o n n n n x x ∞∞=-∞=-∞=+∑∑222[][][]e on n n n n n x x x∞∞∞=-∞=-∞=-∞==+∑∑∑2[][]0eon n n x x ∞=-∞=∑222[][][].e on n n n n n xx x ∞∞∞=-∞=-∞=-∞==+∑∑∑2220()()()2()().eoet dt t dt t dt t t dt x x x x x ∞∞∞∞-∞-∞-∞-∞=++⎰⎰⎰⎰0()()0.et t dt x x ∞-∞=⎰222()()().e ot dt t dt t dt xx x ∞∞∞-∞-∞-∞=+⎰⎰⎰()()()()()().xy yx t x t y d y t x d t φττττττφ∞-∞∞-∞=+=-+=-⎰⎰where k is an integer, then N must be a multiple of m/k and m/k must be an integer .this implies that m/k is a divisor of both m and N .Also, if we want the smallest possible N 0, then m/k should be the GCD of m and N. Therefore, N 0=N/gcd(m,N). 1.36.(a)If x[n] is periodic0(),0..2/j n N T o e where T ωωπ+= This implies that022o T kNT k T T Nππ=⇒==a rational number . (b)T/T 0 =p/q then x[n] =2(/)j n p q e π,The fundamental period is q/gcd(p,q) and the fundmental frequencyis(c) p/gcd(p,q) periods of x(t) are needed .1.37.(a) From the definition of ().xy t φWe havepart(a) that()().xx xx t t φφ=-This implies that()xy t φis(b) Note from even .Therefore,the odd part of().xx t φis zero.(c) Here, ()().xy xx t t T φφ=-and ()().yy xx t t φφ= 1.38.(a) We know that /22(2)().t t δδ=ThereforeThis implies that1(2)().2t t δδ=(b)The plot are as shown in Figure s3.18. 1.39 We havelim ()()lim (0)()0.u t t u t δδ→→==Also,0022gcd(,)gcd(,)gcd(,)gcd(,).T pp q p q p q p q q p q p pωωππ===/21lim (2)lim ().2t t δδ→∞→∞=01lim ()()().2u t t t δδ→=u Δ'(t ) 1 1/2Δ/2-Δ/2t 0tu Δ'(t )12Δ t 0tu Δ'(t ) 1 1/2Δ-Δttu Δ'(t )1 1/2Δ-Δt 0t⎰⎰∞∞∞--=-=0)()()()()(ττδτττδτd t u d t u t gTherefore,0,0()1,00t g t t undefined for t >⎧⎪=<⎨⎪=⎩()0()()()t u t t δττδτδτ-=-=-1.40.(a) If a system is additive ,then also, if a system is homogeneous,then(b) y(t)=x 2(t) is such a systerm . (c) No.For example,consider y(t) ()()ty t x d ττ-∞=⎰with ()()(1).x t u t u t =--Then x(t)=0for t>1,but y(t)=1 for t>1.1.41. (a) y[n]=2x[n].Therefore, the system is time invariant.(b) y[n]=(2n-1)x[n].This is not time-invariant because y[n- N 0]≠(2n-1)2x [n- N 0]. (c) y[n]=x[n]{1+(-1)n +1+(-1)n-1}=2x[n].Therefore, the system is time invariant .1.42.(a) Consider two system S 1 and S 2 connected in series .Assume that if x 1(t) and x 2(t) arethe inputs to S 1..then y 1(t) and y 2(t) are the outputs.respectively .Also,assume thatif y 1(t) and y 2(t) are the input to S 2 ,then z 1(t) and z 2(t) are the outputs, respectively . Since S 1 is linear ,we may write()()()()11212,s ax t bx t ay t by t +→+where a and b are constants. Since S 2 is also linear ,we may write()()()()21212,s ay t by t az t bz t +→+We may therefore conclude that)()()()(212121t b t a t b t a z z x x s s +−→−+Therefore ,the series combination of S 1 and S 2 is linear. Since S 1 is time invariant, we may write()()11010s x t T y t T -→-and()()21010s y t T z t T -→-Therefore,()()121010s s x t T z t T -→-Therefore, the series combination of S 1 and S 2 is time invariant.(b) False, Let y(t)=x(t)+1 and z(t)=y(t)-1.These corresponds to two nonlinear systems. If these systems are connected in series ,then z(t)=x(t) which is a linear system.00.()().00x t y t =→=0()()()()0x t x t y t y t =-→-=(c) Let us name the output of system 1 as w[n] and the output of system 2 as z[n] .Then11[][2][2][21][22]24y n z n w n w n w n ==+-+-[][][]241121-+-+=n x n x n xThe overall system is linear and time-invariant.1.43. (a) We have())(t y t x s−→−Since S is time-invariant.())(T t y T t x s-−→−-Now if x (t) is periodic with period T. x{t}=x(t-T). Therefore, we may conclude that y(t)=y(t-T).This impliesthat y(t) is also periodic with T .A similar argument may be made in discrete time . (b)1.44 (a) Assumption : If x(t)=0 for t<t 0 ,then y(t)=0 for t< t 0.To prove That : The system is causal.Let us consider an arbitrary signal x 1(t) .Let us consider another signal x 2(t) which is the same as x 1(t)fort< t 0. But for t> t 0 , x 2(t) ≠x 1(t),Since the system is linear,()()()()1212,x t x t y t y t -→-Since ()()120x t x t -=for t< t 0 ,by our assumption =()()120y t y t -=for t< t 0 .This implies that()()12y t y t =for t< t 0 . In other words, t he output is not affected by input values for 0t t ≥. Therefore, thesystem is causal .Assumption: the system is causal . To prove that :If x(t)=0 for t< t 0 .then y(t)=0 for t< t 0 .Let us assume that the signal x(t)=0 for t< t 0 .Then we may express x(t) as ()()12()x t x t x t =-, Where()()12x t x t = for t< t 0 . the system is linear .the output to x(t) will be()()12()y t y t y t =-.Now ,since the system is causal . ()()12y t y t = for t< t 0 .implies that()()12y t y t = for t< t 0 .Therefore y(t)=0 for t< t 0 .(b) Consider y(t)=x(t)x(t+1) .Now , x(t)=0 for t< t 0 implies that y(t)=0 for t< t 0 .Note that the system is nonlinear and non-causal .(c) Consider y(t)=x(t)+1. the system is nonlinear and causal .This does not satisfy the condition of part(a). (d) Assumption: the system is invertible. To prove that :y[n]=0 for all n only if x[n]=0 for all n . Consider[]0[]x n y n =→. Since the system is linear :2[]02[]x n y n =→.Since the input has not changed in the two above equations ,we require that y[n]= 2y[n].This implies that y[n]=0. Since we have assumed that the system is invertible , only one input could have led to this particular output .That input must be x[n]=0 .Assumption: y[n]=0 for all n if x[n]=0 for all n . To prove that : The system is invertible . Suppose that11[][]x n y n → and21[][]x n y n →Since the system is linear ,1212[][][][]0x n x n y n y n -=→-=By the original assumption ,we must conclude that 12[][]x n x n =.That is ,any particular y 1[n] can be produced that by only one distinct input x 1[n] .Therefore , the system is invertible. (e) y[n]=x 2[n]. 1.45. (a) Consider ,()111()()shx x t y t t φ→= and()222()()shx x t y t t φ→=.Now, consider ()()()312x t ax t bx t =+. The corresponding system output will be()()12331212()()()()()()()()()hx hx y t x h t d a x h t d b x t h t d a t b t ay t by t ττττττττφφ∞-∞∞∞-∞-∞=+=+++=+=+⎰⎰⎰Therefore, S is linear .Now ,consider x 4(t)=x 1(t-T).The corresponding system output will be()14411()()()()()()()hx y t x h t d x T h t d x h t T d t T τττττττττφ∞-∞∞-∞∞-∞=+=-+=++=+⎰⎰⎰Clearly, y 4(t)≠ y 1(t-T).Therefore ,the system is not time-invariant.The system is definitely not causal because the output at any time depends on future values of the input signal x(t).(b) The system will then be linear ,time invariant and non-causal. 1.46. The plots are in Figure S1.46.1.47.(a) The overall response of the system of Figure P1.47.(a)=(the response of the system to x[n]+x 1[n])-the response of the system to x 1[n]=(Response of a linear system L to x[n]+x 1[n]+zero input response of S)- (Response of a linear system L to x 1[n]+zero input response of S)=( (Response of a linear system L to x[n]).Chapter 2 answers2.1 (a) We have know that 1[]*[][][]k y x n h n h k x n k ∞=-∞==-∑1[][1][1][1][1]y n h x n h x n =-++-2[1]2[1]x n x n =++-This gives1[]2[1]4[]2[1]2[2]2[4]y n n n n n n δδδδδ=+++-+--- (b)We know that2[][2]*[][][2]k y n x n h n h k x n k ∞=-∞=+=+-∑Comparing with eq.(S2.1-1),we see that21[][2]y n y n =+(c) We may rewrite eq.(S2.1-1) as1[][]*[][][]k y n x n h n x k h n k ∞=-∞==-∑Similarly, we may write3[][]*[2][][2]k y n x n h n x k h n k ∞=-∞=+=+-∑Comparing this with eq.(S2.1),we see that31[][2]y n y n =+2.2 Using given definition for the signal h[n], we may write{}11[][3][10]2k h k u k u k -⎛⎫=+-- ⎪⎝⎭The signal h[k] is non zero only in the rang 1[][2]h n h n =+. From this we know that the signal h[-k] is non zero only in the rage 93k -≤≤.If we now shift the signal h[-k] by n to the right, then the resultant signal h[n-k] will be zero in the range (9)(3)n k n -≤≤+. Therefore ,9,A n =- 3B n =+ 2.3 Let us define the signals11[][]2nx n u n ⎛⎫= ⎪⎝⎭and1[][]h n u n =. We note that1[][2]x n x n =- and 1[][2]h n h n =+ Now,。
信号与系统第二版课后答案西安交大奥本海姆
第一章1.3 解:(a). 2401lim(),04Tt T TE x t dt e dt P ∞-∞∞→∞-====⎰⎰(b) dt t x TP T TT ⎰-∞→∞=2)(21lim121lim ==⎰-∞→dt T TTT∞===⎰⎰∞∞--∞→∞dt t x dt t x E TTT 22)()(lim(c).222lim()cos (),111cos(2)1lim()lim2222TT TTTT T TTE x t dt t dt t P x t dt dt TT∞∞→∞--∞∞→∞→∞--===∞+===⎰⎰⎰⎰(d) 034121lim )21(121lim ][121lim 022=⋅+=+=+=∞→=∞→-=∞→∞∑∑N N n x N P N Nn n N N N n N 34)21()(lim202===∑∑-∞=∞→∞nNNn N n x E (e). 2()1,x n E ∞==∞211lim []lim 112121N NN N n N n NP x n N N ∞→∞→∞=-=-===++∑∑ (f) ∑-=∞→∞=+=NNn N n x N P 21)(121lim 2∑-=∞→∞∞===NNn N n x E 2)(lim1.9. a). 00210,105T ππω===; b) 非周期的; c) 00007,,22mN N ωωππ=== d). 010;N = e). 非周期的; 1.12 解:∑∞=--3)1(k k n δ对于4n ≥时,为1即4≥n 时,x(n)为0,其余n 值时,x(n)为1易有:)3()(+-=n u n x , 01,3;M n =-=- 1.15 解:(a)]3[21]2[][][222-+-==n x n x n y n y , 又2111()()2()4(1)x n y n x n x n ==+-, 1111()2[2]4[3][3]2[4]y n x n x n x n x n ∴=-+-+-+-,1()()x n x n = ()2[2]5[3]2[4]y n x n x n x n =-+-+- 其中][n x 为系统输入。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第一章作业解答
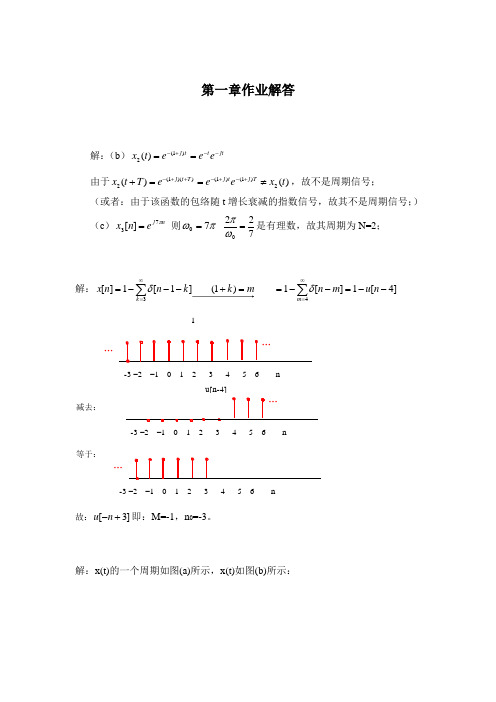
解:(b )jt t t j e e e t x --+-==)1(2)(
由于)()(2)1()1())(1(2t x e e e T t x T j t j T t j ≠==++-+-++-,故不是周期信号;
(或者:由于该函数的包络随t 增长衰减的指数信号,故其不是周期信号;) (c )n j e n x π73][= 则πω70= 7
2
20
=
ωπ
是有理数,故其周期为N=2;
解:]4[1][1)1(]
1[1][4
3--=--==+---=∑∑∞
=∞
=n u m n m
k k n n x m k δδ
-3 –2 –1 0 1 2 3 4 5 6 n
1
…
减去:
-3 –2 –1 0 1 2 3 4 5 6 n
u[n-4]
等于:
-3 –2 –1 0 1 2 3
4 5 6 n
…
故:]3[+-n u 即:M=-1,n 0=-3。
解:x(t)的一个周期如图(a)所示,x(t)如图(b)所示:
而:g(t)如图(c)所示
……
dt
t dx )
(如图(d )所示:
……故:
)1(3)(3)
(--=t g t g dt
t dx 则:1t ,0t 3,3
2121==-==;A A 1.15
解:该系统如下图所示: 2[n]
(1)
]
4[2]3[5]2[2]}4[4]3[2{2
1
]}3[4]2[2{]3[2
1
]2[][][1111111222-+-+-=-+-+-+-=-+
-==n x n x n x n x n x n x n x n x n x n y n y
即:]4[2]3[5]2[2][-+-+-=n x n x n x n y
(2)若系统级联顺序改变,该系统不会改变,因为该系统是线性时不变系统。
(也可以通过改变顺序求取输入、输出关系,与前面做对比)。
解:(a )因果性:)(sin )(t x t y =
举一反例:当)0()y(,0int s x t =-=-=ππ则时输出与以后的输入有关,不是因果的;
(b )线性:按照线性的证明过程(这里略),该系统是线性的。
1.20
解:(a ))(2
1)2cos()(221t j t
j e e t t x -+=
= 则:)(2
1
)}(21{)(33221t j t j t j t j e e e e T t y --+=+=;
(b) t j j t j j t j t j e e e e e e t t x 2121)12()12(22
1
21)(21))21(2cos()(-----+=+=-=
则:)3
1(3cos )(212121)()3
1
(3)31
(331312-=+=+=-----t e e e e e e t y t j t j t j j t j j
(注意:此系统不是时不变系统。
)
(b)x(2-t)
(c)x(2t+1)
(d)x(4-t/2)
2
(b)x[3-n]
1
1
1 1
x[n+3]
1 x[-n+3]
1
1
1
解:
x[3n+1]
1
1
1 1
x[n+1]
(注意:离散信号压缩后,只取整数点的值,压缩后会损失信息) (e) x[n]u[3-n]=x[n]
1
1
1
1 x[n]u[3-n]
则:)]()([21)(t x t x t x e -+=
,)]()([2
1
)(t x t x t x o --=分别如下图所示:
(注意:在对信号做奇偶分解时,尽量用图形的方式直观;而表达式烦琐,且容易出错)
解:(a))3
4cos(3)(π
+
=t t x 是周期信号, 40=ω 2
20
π
ωπ
=
=
T
6
解:(a ))176sin(
][+=n n x π 7
60π
ω= 则:
3
7
20
=
ωπ
为有理数,故该信号是周期的,其周期N=7; (b ))8
1cos(][π-=n n x 8
10=
ω 则:
πωπ
1620
=为无理数,故该信号不是周期的;
7
先证明几个基本的系统:时移系统、反折系统、尺度系统的线性、时不变、因果、稳定性; 一:时移系统:)()(1t t x t y -=
(1) 线性:
)
()()()(122111t t x t y t t x t y -=-=
令:
满足可加性
)()()1()1()()()()()(2121133213t y t y t x t x t t x t y t x t x t x +=-+-=-=→+=满足齐次性)()()()()()(11114414t ky t t kx t t x t y t kx t x =-=-=→=
故:时移系统是线性系统; (2) 时不变性:)()(111t t x t y -=
令:)()()()()(101122012t t t x t t x t y t t x t x --=-=→-=
而:)()(01101t t t x t t y --=-
统。
故时移系统是时不变系)
()(201t y t t y =- (3)因果性:由定义可知,当01≥t ,则系统是因果的;否则为非因果系统; (4)记忆性:由定义可知,时移系统是记忆系统;
(5)稳定性:由于信号进行时移后,不影响幅度,故时移系统是稳定的;
二 反折系统: 线性、时变、非因果、记忆、稳定; 三 尺度系统:线性、时变、非因果、记忆、稳定;
(a) )2()2()(t x t x t y -+-=
解:由于该系统由时移与反折系统所组成,故性质由二者决定: 线性、时变、非因果、记忆、稳定;
(b ))(]3[cos )(t x t t y =
线性(略):是线性的 时不变性:)(]3[cos )(1t x t t y =
令:)(]3[cos )(]3[cos )()()(0122012t t x t t x t t y t t x t x -==→-= 而:)()](3[cos )(01001t t x t t t t y --=-
故系统时变)
()(201t y t t y ≠-
(总结:若y(t)与x(t)之间的关系除了x(t)的形式外,还包括有关于t 的函数,则该系统是时变系统)
因果性:输出仅与x(t)的当前值有关,故系统因果;
(注意,因果性的定义:仅与当前值或以前值有关【二者只要满足一个就是】)
记忆性:输出仅与x(t)的当前值有关,故为非记忆系统;
稳定性:由于cos3t 是有界的函数,则x(t)有界,y(t)有界,故系统稳定;
(c )⎰∞-=t
d x t y 2)()(ττ
解:线性:该系统是线性的(参考1小题证明);
时不变性:
⎰∞
-=t
d x t y 211)()(ττ
令:)()(012t t x t x -=
则:
⎰
⎰
⎰⎰-∞
--∞
-∞
-∞
-===--==0
21210201222)(')'('
)()()(t t t t t t
d x d x t d t x d x t y τ
ττττττ
τττ令
而:
⎰
⎰
-∞
--∞
-==-00221)(2101)()()(t t t t d x d x t t y τ
τττ
故系统时变)
()(201t y t t y ≠-
(注意,若这里的积分上限是t ,不是2t ,则系统是时不变的) 其他为:记忆、非因果,不稳定; (d )该式改写为:
)()]2()([)(t u t x t x t y -+=
线性:系统是线性、时变、因果、记忆、稳定的; 1.31
解:(a)
)2()((112--=t x t x t x
由于该系统是LTI 系统,则)2()((112--=t y t y t y
(b ))1()1((113-++=t x t x t
x
由于该系统是LTI 系统,则
)1()1()(113-++=t y t y t y
t
t。