5.7哈密顿原理作业
哈密顿原理
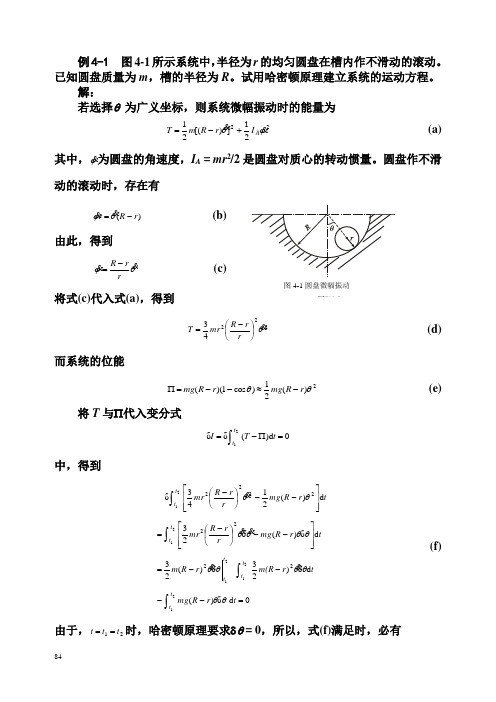
例4-1 图4-1所示系统中,半径为r 的均匀圆盘在槽内作不滑动的滚动。
已知圆盘质量为m ,槽的半径为R 。
试用哈密顿原理建立系统的运动方程。
解:若选择θ 为广义坐标,则系统微幅振动时的能量为222])[(21ϕθ A I r R m T 1+-=(a)其中,ϕ为圆盘的角速度,I A = mr 2/2是圆盘对质心的转动惯量。
圆盘作不滑动的滚动时,存在有)(r R r -=θϕ(b)由此,得到θϕrr R -= (c)将式(c)代入式(a),得到22243θ ⎪⎭⎫ ⎝⎛-=r r R mr T (d)而系统的位能2)(21)cos 1)((θθr R mg r R mg -≈--=∏ (e)将T 与∏代入变分式0d )(δδ21=∏-=⎰t T I t t中,得到d δ)(d δ)23-δ)(23d δ)(δ23d )(2143δ212121212122222222=----=⎥⎥⎦⎤⎢⎢⎣⎡--⎪⎭⎫ ⎝⎛-=⎥⎥⎦⎤⎢⎢⎣⎡--⎪⎭⎫ ⎝⎛-⎰⎰⎰⎰t r R mg t r m(R r R m tr R mg r r R mr t r R mg r r R mr t t t t t t t t t t θθθθθθθθθθθθ (f)由于,21t t t ==时,哈密顿原理要求δθ = 0,所以,式(f)满足时,必有0)()(232=-+-θθr R mg r R m (g)式(g)就是系统微幅振动时的运动方程。
例4-2 图4-2所示系统,摆的支点在水平方向受到弹性约束,其总刚度为k ,摆的质量为m ,摆长为l解:(1)选择x 及θ 为广义坐标。
(2)动能及势能动能:22])sin [(21])cos ([21θθθθ l m l xm T ++= (a) 势能:)cos 1(212θ-+=mgl kx V (b) (3)广义外力为零本例题中广义外力。
(4)运动方程将式(a)与式(b)代入式(4-21),得到0sin sin cos 0sin cos 222=+-+=+-+θθθθθθθθθmg x ml ml xml kx ml ml xm(c)这就是摆的运动方程。
17哈密顿函数守恒原理

2T2 T1
哈密顿函数,
L T2 T0 V H p q
1
s
这样, 在变换式显含时间的条件下, 哈密顿函数H并非机械能, 只能姑名之为广义能量. 注意: 矢量力学关于机械能守恒的条件为作用力是保守力. 可是, 哈密顿函数守恒即机械能守恒却还要求坐标变换式不显含时间. 这两种根源是否矛盾呢? 原来, 这两者并不是一回事. 矢量力学 所说的势能对应于所有的力,包括主动力和约束力, 而拉格朗日 函数L和哈密顿函数H中的势能则只对应广义力, 即只包括主动 力, 不包括理想约束力. 可见这两种势能并不相同, 机械能守恒 的条件当然也就不同了.
s n
这样, 我们得到
L 2T (T V ) T V H p q
1
s
在坐标变换不显含时间的条件下, 动能是广义速度的二 次齐次式, 哈密顿函数就是机械能.
如果约束是不稳定的或者约束是稳定的, 但变换ri=ri(q,t) 显含时间, s ri ri ri q t 1 q
dL L s d L dt t 1 dt q
s L d s L L dq q q q d t t d t q 1 1
这样
d s L L L q dt 1 q t
定义哈密顿函数
s L L p q L H q 1 q 1 s
如拉格朗日函数L不是时间显函数, 哈密顿函数H守恒 哈密顿函数是什么? s ri ri q 因为坐标变换不显含时间, 所以 1 q n n s s ri ri 1 1 于是 T mi ri ri mi q q 2 i 1 2 i 1 1 q 1 q s s n ri ri 1 q mi q q q 1 1 i 1 2
理论力学(周衍柏)习题答案,第五章

第五章习题解答5.1解如题5.1.1图杆受理想约束,在满足题意的约束条件下杆的位置可由杆与水平方向夹角所唯一确定。
杆的自由度为1,由平衡条件:即mg y =0①变换方程y=2rcos sin-= rsin2②故③代回①式即因在约束下是任意的,要使上式成立必须有:rcos2-=0④又由于cos=故cos2=代回④式得5.2解如题5.2.1图三球受理想约束,球的位置可以由确定,自由度数为1,故。
得由虚功原理故①因在约束条件下是任意的,要使上式成立,必须故②又由得:③由②③可得5.3解如题5.3.1图,在相距2a的两钉处约束反力垂直于虚位移,为理想约束。
去掉绳代之以力T,且视为主动力后采用虚功原理,一确定便可确定ABCD的位置。
因此自由度数为1。
选为广义坐。
由虚功原理:w①又取变分得代入①式得:化简得②设因在约束条件下任意,欲使上式成立,须有:由此得5.4解自由度,质点位置为。
由①由已知得故②约束方程③联立②③可求得或又由于故或5.5解如题5.5.1图按题意仅重力作用,为保守系。
因为已知,故可认为自由度为1.选广义坐标,在球面坐标系中,质点的动能:由于所以又由于故取Ox为零势,体系势能为:故力学体系的拉氏函数为:5.6解如题5.6.1图.平面运动,一个自由度.选广义坐标为,广义速度因未定体系受力类型,由一般形式的拉格朗日方程①在广义力代入①得:②在极坐标系下:③故将以上各式代入②式得5.7解如题5.7.1图又由于所以①取坐标原点为零势面②拉氏函数③代入保守系拉格朗日方程得代入保守系拉格朗日方程得5.8解:如图5.8.1图.(1)由于细管以匀角速转动,因此=可以认为质点的自由度为1.(2)取广义坐标.(3)根据极坐标系中的动能取初始水平面为零势能面,势能:拉氏函数①(4),代入拉氏方程得:(5)先求齐次方程的解.②特解为故①式的通解为③在时:④⑤联立④⑤得将代回式③可得方程的解为:5.9解如题5.9.1图.(1)按题意为保守力系,质点被约束在圆锥面内运动,故自有度数为2. (2)选广义坐标,.(3)在柱坐标系中:以面为零势能面,则:拉氏函数-①(4)因为不显含,所以为循环坐标,即常数②对另一广义坐标代入保守系拉氏方程③有得④所以此质点的运动微分方程为(为常数)所以5.10解如题5.10.1图.(1)体系自由度数为2.(2)选广义坐标(3)质点的速度劈的速度故体系动能以面为零势面,体系势能:其中为劈势能.拉氏函数①(4)代入拉格郎日方程得:②代入拉格郎日方程得③联立②,③得5.11 解如题5.11.1图(1)本系统内虽有摩擦力,但不做功,故仍是保守系中有约束的平面平行运动,自由度(2)选取广义坐标(3)根据刚体力学其中绕质心转动惯量选为零势面,体系势能:其中C为常数.拉氏函数(4)代入保守系拉氏方程得:对于物体,有5.12解如题5.12.1图.(1)棒作平面运动,一个约束,故自由度. (2)选广义坐标(3)力学体系的动能根据运动合成又故设为绕质心的回转半径,代入①得动能②(4)由③(其中)则④因为、在约束条件下任意且独立,要使上式成立,必须:⑤(5)代入一般形式的拉氏方程得:⑥又代入一般形式的拉氏方程得:⑦⑥、⑦两式为运动微分方程(6)若摆动角很小,则,代入式得:,代入⑥⑦式得:⑧又故代入⑧式得:(因为角很小,故可略去项)5.13解如题5.13.1图(1)由于曲柄长度固定,自由度.(2)选广义坐标,受一力矩,重力忽略,故可利用基本形式拉格朗日方程:①(3)系统动能②(4)由定义式③(5)代入①得:得5.14.解如题5.14.1图.(1)因体系作平面平行运动,一个约束方程:(2)体系自由度,选广义坐标.虽有摩擦,但不做功,为保守体系(3)体系动能:轮平动动能轮质心转动动能轮质心动能轮绕质心转动动能.①以地面为零势面,体系势能则保守系的拉氏函数②(1)因为不显含,得知为循环坐标.故=常数③开始时:则代入得又时,所以5.15解如题5.15.1图(1)本系统作平面平行运动,干限制在球壳内运动,自由度;选广义坐标,体系摩擦力不做功,为保守力系,故可用保守系拉氏方程证明①(2)体系动能=球壳质心动能+球壳转动动能+杆质心动能+杆绕中心转动动能②其中代入②得以地面为零势面,则势能:(其中为常数)(3)因为是循环坐标,故常熟③而代入①式得④联立③、④可得(先由③式两边求导,再与④式联立)⑤⑤试乘并积分得:又由于当5.16解如题图5.16.1.(1)由已知条件可得系统自由度.(2)取广义坐标.(3)根据刚体力学,体系动能:①又将以上各式代入①式得:设原点为零势能点,所以体系势能体系的拉氏函数②(1)因为体系只有重力势能做工,因而为保守系,故可采用③代入③式得即(5)解方程得5.17解如题5.17.1图(1)由题设知系统动能①取轴为势能零点,系统势能拉氏函数②(2)体系只有重力做功,为保守系,故可采用保守系拉氏方程.代入拉氏方程得:又代入上式得即③同理又代入上式得④令代入③④式得:欲使有非零解,则须有解得周期5.18解如题5.18.1图(1)系统自由度(2)取广义坐标广义速度(3)因为是微震动,体系动能:以为势能零点,体系势能拉氏函数(4)即①同理②同理③设代入①②③式得欲使有非零解,必须解之又故可得周期5.19解如题5.19.1图(1)体系自由度(2)取广义坐标广义速度(3)体系动能体系势能体系的拉氏函数(4)体系中只有弹力做功,体系为保守系,可用①将以上各式代入①式得:②先求齐次方程③设代入③式得要使有非零,必须即又故通解为:其中又存在特解有②③式可得式中及为积分常数。
TM5-9哈密顿原理

• 变分法简介 • 哈密顿原理 • 哈密顿原理的应用
1
一.变分法简介
1.力学体系的变分原理 (1) 定义 凡力学原理用到变分运算的,叫做力学的变分原理 (2) 意义 它是在基本定律基础上用变分法得到的,提出了 区分真实运动与同样条件下可能的运动的规则。
(3) 力学的变分原理有
d ( q ) (dt ) dq dt (dt ) 2 d d ( t ) ( q ) dq dt (dt ) 2
若是等时变分,即 t 0,所以上式为 dq dt d ( q ). dt
17
dq dt
不等时变分
称 S
t2
t1
Ldt
Ldt 0
t1
t2
为作用函数或主函数
S 0
23
(3) 说明 • 通过变分,可把微分方程变为简单形式,即哈 密顿正则方程,哈密顿用该方程提供一个普遍 原理,对量子力学中薛定谔方程的建立和广义 相对论提供了桥梁。 • 能量观点和拉格朗日方程、哈密顿原理及正则 方程,适用于其它形式的物质运动,如电动力 学、统计物理、相对论、量子力学。
18
二、哈密顿原理
1.位形空间和运动路径
(1) 位形空间
受有完整约束的力学体系, 由s个广义坐标组成的空 间,称为位形空间.
一般地,广义坐标 q ( 1, 2
s) 是时间t的函数。在以
q1 , q2 ,
, q 为坐标轴所张成的S维空间中,随着t从t1连续
变化到t2,体系从位形空间中的位置q(t1)连续变化到q(t2),位 形空间的“点”则描绘出一条轨迹。
C与C'是两个轨道(宗量函数),两个轨道的两端点P 1 ,P 2相同.
湘潭大学现代物理导论II157哈密顿原理

固定点 A,B 的曲线 y(t ) , 使得 J A 有极值。 假设图中红色曲线为所求的 y(t ) ,使得 J 有极值。 虚 线 为 接 近 y(t ) 的 另 一 条 曲 线 , (t ) y(t , ) y(t ) f (t ) , 为无限小参量。 0 y (t ) y (t ) 。 时, y 因此 J 也是参量 的函数,即
F d F ( ) 0 (5.7.4) y dt y
上式为泛涵 J 有极值时函数 y(t ) 需要满足的条件, 它是关于函 数的二阶常微分方程,称为欧拉方程。
现代物理导论I
(四)哈密顿原理
)dt 中的 y 更换 如果把前面泛涵 J [ y (t )] F (t , y, y
(2)变分 假定 C 是空间一条曲线,且为质 点遵从运动规律运行时的轨道, 即真实轨 道。 C ' 为邻近 C 的一条曲线,但不是质 点的动力学轨道,为两端点相同。
P2
Q'
C ' P'
P1
Q
C
P
两相差甚微的两条曲线之间的差异称为变分,用符号 表示。 在两端点有
qs
P 1
qs
P2
0
如果 P ', Q ' 是 C ' 上与 C 上对应的两点,则 Q ' 的坐标可以通过 两种途径得到: (1)质点自 P 到 P ' ,然后到 Q ' ,或者(2) 质点由 P 到 Q 再到 Q ' 。这样有
泛涵:给定一任意函数 y ( x) 组成的集合 D ,如果对每一个元 素 y ( x) 都有一个数 J 与之一一对应,则 J 是 y ( x) 的泛涵,记 为 J J [ y ( x)]
TM5-9哈密顿原理
t2
t1
Ldt
Ldt 0
t1
t2
为作用函数或主函数
S 0
23
(3) 说明 • 通过变分,可把微分方程变为简单形式,即哈 密顿正则方程,哈密顿用该方程提供一个普遍 原理,对量子力学中薛定谔方程的建立和广义 相对论提供了桥梁。 • 能量观点和拉格朗日方程、哈密顿原理及正则 方程,适用于其它形式的物质运动,如电动力 学、统计物理、相对论、量子力学。
d L dt q
t2
t1
d L 1 dt q
s
L q dt 0 q
但
d L dt q
L d d L q q q dt q q dt L d L q q 代入上式得: dt q q
1 2 1 2 kx dt 0 Ldt mx 0 2 2
t
上式变为
kxxdt 0 x m
t 0
x为任意,且dt任意,所以有
kx 0 m x
26
例2 轻弹簧一端挂一质量为m的质点,另一端为悬点O,弹簧 倔强系数为 k,不受力时原长为 l,摆动限于铅垂平面内,试 用哈密顿原理求出质点的运动微分方程。
t1
S
t2
t1
d x x x x x kxx dt 0 x x 0 mx dt t t x 0 x t 0 m x d x m x x kx x dt 0
t
0 0
18
二、哈密顿原理
1.位形空间和运动路径
(1) 位形空间
7第5章哈密顿原理
第5章哈密顿原理如前所述,力学的变分原理的实质是:将真实运动与可能发生的运动加以比较,建立判别准则以区分真实运动和可能的运动.哈密顿原理是通过真实运动与可能的运动在位形空间的位形轨迹加以比较,而哈密顿作用量S 是对不同的位形轨线取不同值的泛函,从而得到对真实运动来讲,哈密顿作用量的变分等于零.将拉格朗日方程引人哈密顿函数,导出哈密顿正则方程;给出了一种对偶的数学体系,开拓了应用前景;由动力学普遍方程对时间积分,导出一个重要的力学变分原理——哈密顿原理,提出了将真实运动与同样条件下的可能运动区分开来的准则;对于有限过程,提供了一种动力学问题的直接近似解法.5。
1 哈密顿正则方程哈密顿正则方程是分析力学中又一个重要的力学方程,它与拉格朗日方程等价,是2n 个一阶常微分方程组。
我们知道,对于一个质点系统,在建立拉格朗日方程后,重要的问题是研究这个微分方程组的积分,但是求解往往是很困难的。
哈密顿正则方程的重要性在于它将n 个二阶微分方程变换为2n 个一阶方程,而且结构对称、简洁,为正则积分理论创造了有利条件。
若是说拉格朗日方程对分析力学起着开拓性作用,则哈密顿正则方程对分析力学中的积分理论起着基础的和推动的作用.哈密顿正则方程的重要性还在于在许多理论的定性研究中,并不需要求解微分方程组,而是将二阶微分方程变换为二个一阶方程并应用几何方法求解。
5.1。
1 正则方程的建立对于主动力均有势的k 个自由度的完整约束系统,其拉格朗日方程为),,2,1(0d d k j q L q L t j j ==∂∂-⎪⎪⎭⎫ ⎝⎛∂∂ (5—1)引入广义动量),,2,1(k j qL p j j =∂∂=(5—2)代入式(5—1),有),,2,1(k j q Lpjj =∂∂=(5-3)设拉格朗日函数L 满足条件0det 2≠⎪⎪⎭⎫⎝⎛∂∂∂k j q q L 于是,可由式(5-2)反解出),,2,1(),,,,,,(11k j t p p q q f q k k j j ==(5-4)式(5—3)和式(5—4)就把方程(5-1)由k 个二阶微分方程化为2k 个一阶微分方程,其中方程组(5-4)并非正则形式.引入哈密顿函数),,(1),,(t p q f q j j k j j j j j j j L q p t p q H ==⎥⎥⎦⎤⎢⎢⎣⎡-=∑(5-5)按照Legendre 变换规则,将j q变换成),,2,1(k j p j =,而q i 和t 仍然保持不变,则有 jj p Hq∂∂= (5-6) ),,2,1(k j q Hq L jj =∂∂-=∂∂(5—7)tHt L ∂∂-=∂∂ (5-8)将式(5-7)代入式(5—3),并与式(5—6)联立,得),,2,1(,k j q H pp H q jj j j =∂∂-=∂∂= (5-9)这就是哈密顿正则方程,是以广义坐标和广义动量为独立变量的2k 个一阶常微分方程。
哈密顿原理的应用

哈密顿原理的应用解题步骤
分析约束,确定自由度
选好广义坐标
写出系统的
T,V,L
代入
∫
∫
=
+
−
=
=
=
2
1
2
1
)
(
t
t
t
t
dt
q
P
H
s
Ldt
s
α
α
δ
δ
δ
δ
&
或者
x
一半径为r,质量为m的实心圆柱体在一半径为R的大圆柱体内表面作纯滚动,试用哈密顿正原理求其在平衡位置附近作o
4 L
=
2 t
sδ
2
3m
2−
板.设所有接触处均无滑动,今以一水平恒力F
拉板,试用哈密蹲原理求板的加速度.
取如图所示x为广义坐标
T
∫=2
Ldt
s δδ
=
1
t
=
2 t
1
4
3
解:
t δ
mr θδθ
θδθθ&&&&22mr r mr −−
δ
∫= 1[(
t
中间质点在某时刻获得与绳垂直且沿水平面的初速度,试用拉格朗日方程求左右两质点相遇时的速率.
0v 自由度数
取如图所示,(θy demonstration
θθ
B
t δ
δ
1
1
S t δ。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1
哈哈密密顿顿原原理理作作业业
1.如图示,质量为m 的复摆绕通过某点O 的水平轴作微小振动,复摆对转轴的转动惯量为0I ,质心C 到悬点O 的距离为 ,试用哈密顿原理求该复摆的运动方程及振
动周期。
1.解:取θ为广义坐标,则拉格朗日函数为: θ+θ=-=cos mg I 21
V T L 2
0 其中取悬点O 为零势能点。
于是哈密顿原理0dt L 21t t =δ⎰可得:0dt cos mg I 2
121t t 20=⎪⎭⎫ ⎝⎛θ+θδ⎰ 即:()0dt sin mg I 2
1t t 0=θδθ-θδθ
⎰ 而δθθ-δθθ=δθθ=θδθ 0
000I )I (dt d
)(dt d
I I 则:()0dt sin mg I )I (dt d dt sin mg I 212
1t t 00t t 0=⎪⎭⎫ ⎝⎛θδθ-δθθ-δθθ=θδθ-θδθ
⎰⎰ 即:()0dt sin mg I I 212
1t t 0t t 0=δθθ+θ-δθθ
⎰ 而0I 21t t 0=δθθ ,δθ取任意值
所以:0sin mg I 0=θ+θ
即:0sin I mg 0=θ+θ
而θ≈θsin ,则:0I mg 0
=θ+θ
,此即为所求的运动方程。
其中角频率0I /mg =ω 所以振动周期)mg /(I 2/2T 0 π=ωπ=。
2.试用哈密顿原理求质量为m 的质点在重力场中用直角坐标系表示的运动微分方程。
2.解:取x,y,z 为广义坐标,则: 体系的动能)z y x (m 2
1
T 222 ++= 势能mgz V =(以地面为零势能点)
拉氏函数mgz )z y x (m 21
V T L 222-++=-=
2 于是哈密顿原理0dt L 21t t =δ⎰可得:0dt mgz )z y x
(m 2
121t t 222=⎪⎭⎫ ⎝⎛-++δ⎰ 即:()0dt z mg z z m y y m x x
m 2
1t t =δ-δ+δ+δ⎰ 而x x x x dt d x dt
d
x x x δδδδ -==)()( y y y y dt d y dt d y y y
δδδδ -==)()( z
z z z dt d
z dt d
z z z δδδδ -==)()( 则:()0dt z mg z z m y y m x x m )z z m y y m x x
m (212
1t t t t =δ+δ+δ+δ-δ+δ+δ⎰ 而0)z z m y y m x x m (2
1t t
=δ+δ+δ ,x δy δz δ相互独立且取任意值 所以所求的运动微分方程为:
⎪⎩⎪⎨⎧=+==0mg z
m 0y m 0x m
3.试用哈密顿原理求单摆的微振动方程和周期。
3.解:设单摆的摆长为 ,摆锤质量为m ,取θ为广义坐标,则拉格朗日函数为:θ+θ=-=cos mg m 2
1
V T L 22 其中取悬点o 为零势能点。
于是哈密顿原理0dt L 21
t t =δ⎰可得: 0dt cos mg m 2
121t t 22=⎪⎭⎫ ⎝⎛θ+θδ⎰ 即:()
0dt sin mg m 2
1t t 2=θδθ-θδθ⎰ 而δθθ-δθθ=δθθ=θδθ )(dt
d )(dt d 则:()
0dt sin mg m m 212
1t t 2t t 2=δθθ+θ-δθθ⎰ 而0
2
1t t =δθθ ,δθ取任意值 则:0sin g
=θ+θ
而θ≈θsin ,则0g
=θ+θ ,此即为单摆的微振动方程
3 于是角频率 /g =ω 所以周期g /2/2T π=ωπ=。
4.试用哈密顿原理求一维谐振子的微振动方程和周期。
4.解:设一维谐振子的屈强系数为k ,质量为m ,取x 为广义坐标,则拉格朗日函数为:22kx 21
x m 21
V T L -=-=
其中以平衡位置为零势能点。
于是哈密顿原理0
dt L 21
t t =δ⎰可得: 0
dt kx 21
x m 2121t t 22=⎪⎭⎫
⎝⎛-δ⎰
即:()0
dt x kx x x m 21
t t =δ-δ⎰ 而x x )x x (dt d
)x (dt d x x x δ-δ=δ=δ 则:()0dt x kx x m x x m 21
2
1t t t t =δ+-δ⎰ 而0x x m 2
1
t t =δ ,x δ取任意值 则:0kx x m =+
此即为一维谐振子的微振动方程。
于是角频率m /k =ω 所以周期k /m 2/2T π=ωπ=。