雷赛运动控制卡应用程序开发注意事项
运动控制卡应用编程技巧
运动控制卡应用编程技巧内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理!更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展.关于源代码的阅读,需要读者有一定的C++编程基础,至少对以下表示形式不会产生误解:const char *pString; //指定pString邦定的数据不能被修改char * const pString; //指定pString的地址不能被修改const char * const pString; //含上面两种指定功能当然,随便提醒一下,这些源代码若需要加入你的软件工程当中,还需要作一些调整和修改,因此,这些源代码实质上称为伪代码也可以,之所以展现它们,是让程序员们有个可视化的快感,特别是那些认为源代码就是一切的程序员。
同时,为了提高针对性,大部分控制卡调用的函数会明确指出是邦定哪些卡的,实际应用时,程序员可自行选择,以体现一下自己的智商是可以写写软件的。
一、控制卡类的单一实例实现把控制卡类作一个类来处理,几乎所有C++程序员都为举双手表示赞同,故第一个什么都没有的伪代码就此产生,如下表现:class CCtrlCard{public:…Functionpublic:…attrib}于是,用这个CctrlCard可以产生n多个控制卡实例,只要内存足够。
然而,针对现实世界,情况并不那么美好。
通常情况下,PC机内只插同种类型的控制卡1到2张,在通过调用d1000_board_init或d3000_board_init函数时,它们会负责返回有效卡数nCards,然后从0-nCards*4- 1自行按排好轴数。
初始化函数就是C++的new或malloc的操作,取得系统的资源,但是控制卡的资源与内存不一样,取得资源后必需要释放才可以再次获取,即控制卡资源是唯一的。
雷赛运动控制卡说明书【详细版】

首先,请确保运动控制卡已经插入到你的计算机插槽中,已安装好驱动程序,并用演示软件确认硬件系统工作正常。
安装好VB软件,但在开始编写运动控制软件前,需要做下面几项工作:1 :建立自己的工作目录,如:d:\vbMotion(此目录名可以自己指定)。
2 :将DMC5480.bas文件拷贝到该目录下(此文件在软件CD的module目录下可以找到)。
3 :运行VB,并建立一个工程,然后保存此新建的工程在vbMotion目录中然后按下述步骤,将运动函数库链接到你的工程项目中:1:在VB编译器的“工程(P)”菜单中选择“添加模块”;2 选择“现存”;3 选择“DMC5480.bas”;4 选择“确定”。
5 当您将运动函数链接到你的工程项目中后,就可以象调用其它API函数一样直接调用运动函数,每个函数的具体功能,请参考软件手册中的“运动函数说明”,当然还可以打开模块文件DMC5480.bas了解每个函数的具体定义。
确保DMC5480运动控制卡已经插入到你的计算机插槽中,安装好驱动程序,演示软件和VC软件,在调用DMC5480运动函数之前,需要做下面几项工作:1. 启动演示软件,进行运动控制卡控制功能的简单测试,如:单轴定长运动等,以确定DMC5480运动控制卡软硬件安装正常。
2. 运行VC,并建立一工程,将工程命名为vcMotion(注:此工程名可以自己指定);3. 将DMC5480.lib和DMC5480.h文件拷贝到该目录下(此文件在module目录下);4. 将运动函数链接到你的工程项目中,将DMC5480.lib加入到工程中;5. 在调用运动函数的文件头部代码中加入#include “DMC5480.h”语句。
在编程过程中,可以参阅运动函数编程实例,可以通过网站下载,只要您将控制卡及其驱动软件安装好,即可直接运行这些源代码。
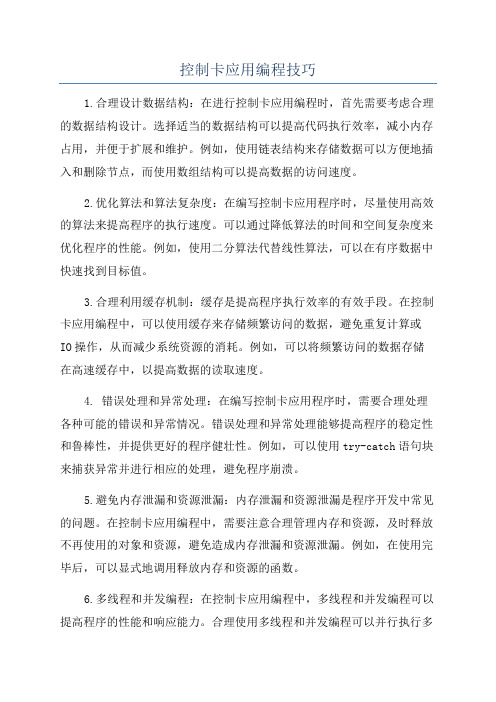
使用雷赛运动控制卡的设备控制系统结构如图3-1所示:图1 基于雷赛运动控制卡的设备控制系统结构从上面的结构图可以看出,控制系统的工作原理可以简单描述为:1. 操作员的操作信息通过操作界面(包括显示屏和键盘)传递给系统控制软件;2. 系统控制软件将操作信息转化为运动参数并根据这些参数调用DLL库中运动函数;3. 运动函数调用雷赛运动控制卡驱动程序发出控制指令给控制卡;4. 雷赛运动控制卡再根据控制指令发出相应的驱动信号(如脉冲、方向信号)给驱动器及电机、读取编码器数据、读/写通用输入/输出口。
DMC1380硬件使用手册V1.1
1.1 产品简介
DMC1380 运动控制卡是采用雷赛公司自主研发的运动控制专用芯片设计的 PCI 总线脉冲式运动控制卡,可对多个步进电机、伺服电机进行点位运动控制, 位置指令可用单路脉冲(脉冲+方向)或双路脉冲(CW 脉冲+CCW 脉冲)方式 输出,可以是差分式也可以是单端信号;同时还有专用、通用 I/O 控制功能。
附录.......................................................................................................................... 22
DMC1380 硬件使用手册 Version 1.1
图 1-1 DMC1380 控制原理图
1.2 产品特点
DMC1380 硬件使用手册 Version 1.1
Байду номын сангаас
● 可控制 3 轴步进电机或伺服电机 ● 32 位 PCI 总线,即插即用 ● 最大输出脉冲频率 1.2MHz ● 梯形速度曲线 ● 位置控制、速度控制 2 种模式 ● 原点、正负限位、正负减速接口 ● 55 路通用 I/O 口 ● 最多可 12 块 1380 卡同时工作。 ● 高集成度,高可靠性 ● 光电隔离耐压 2500V RMS ● 支持 Windows9X/ME/NT/2000/XP 应用开发
DMC1380 PCI 总线三轴运动控制卡
硬件使用手册
Version 1.1
DMC1380 硬件使用手册 Version 1.1
©Copyright 2009 Leadtech Control Technology Co.,Ltd. All Rights Reserved.
雷赛运动控制卡应用程序开发注意事项
雷赛运动控制卡应用程序开发注意事项发布时间:2011年6月1日雷赛科技刘玉平概述:对于一些初次使用雷赛运动控制产品的客户,由于对本公司产品的特点以及程序开发流程不够熟悉,在应用程序的开发过程中,难免会疏漏一些细节,从而产生各种问题,浪费很多宝贵的时间。
如果在应用程序开发前,就可以考虑到那些既重要又容易疏漏的细节,这样可以避免很多不必要的问题产生,从而大大缩短程序的开发周期。
本文总结以往的经验,以雷赛运动控制卡DMC2410B为例,为客户在开发应用程序时的初始化过程给出了一些参考与建议(其他产品与此类似),其中包括运动控制卡的初始化、特殊参数的设置及各种信号的设置,如图1虚线框内所示,这些处理过程必须加载至应用程序的初始化过程中,不同编程环境下,应用程序的初始化过程略有不同,例如在VB6.0编程环境下,须在Form_Load()函数中做程序的初始化处理,而在VC6.0编程环境下,须在OnInitDialog()函数中做程序的初始化处理。
图1 DMC2410B控制卡应用程序开发流程图1所示的控制卡初始化过程中,实线框内所示的参数设置或特殊信号的设置必须在初始化过程中加以处理,而虚线框内的信号在未选择使用时,可以不用设置,而当选择使用这些信号时,必须进行正确设置。
下面对这些初始化过程的方法及必要性做出简要的说明。
一、初始化运动控制卡相关函数:WORD d2410_board_init (void)函数功能:为控制卡分配系统资源并初始化控制卡;若在应用程序中未初始化控制卡,则系统无法为控制卡分配资源,导致控制卡无法正常使用,程序在运行时提示错误,弹出如图2所示对话框:图2 未初始化控制卡时的错误提示注意:程序在结束运行时,必须关闭运动控制卡,以释放系统资源,否则控制卡将一直占用系统资源,导致再次运行该应用程序时产生错误。
关闭控制卡的方法及说明如下:相关函数:Void d2410_board_close (void)函数功能:释放控制卡占用的系统资源。
运动控制卡

运动控制卡组件:控制卡,接线盒,连接电缆,扩展电缆端口介绍:3个端口端口介绍:连线板与外部连线脉冲及方向控制信号差分及单端跳线差分输出跳线设置单端输出跳线设置控制卡拨码设置拨码开关示意图控制产品与驱动器脉冲模式知识 使用运动控制产品前,需要匹配控制单元(如雷赛控制卡),与被控制单元(步进驱动器或伺服驱动器)之间的脉冲模式。
雷赛运动控制卡的脉冲模式需要用软件调用函数进行设置。
下图是雷赛控制卡测试软件的脉冲模式设置界面,脉冲模式分2大类别,共6种。
1.、单脉冲模式或PUL+DIR模式2、双脉冲模式或CW/CCW模式另外,为了正确匹配控制卡与驱动器,它们之间的硬件电路连接也需要进行配置。
雷赛的控制卡产品兼容2种方式,电路简图如下,配置细节请参见“安装接线”板块下与各产品相关的内容。
方式1 :差分方式,此方式抗干扰能力强,几乎所有的伺服驱动器都采用该模式。
方式2:单端方式,此方式抗干扰能力弱,传统的步进驱动器都采用该模式。
1、控制产品输出给外部的电源控制产品能输出给外部的电源,是唯一提供给外部编码器或光栅尺的电源,该电源是5VDC电源,并非全部的雷赛控制产品能提供该5VDC电源,具体需要参考雷赛产品手册。
控制卡5VDC电源来自→ PC主机电源。
独立式控制器5VDC电源来自→内部DC-DC转换电路2、控制产品需要外部提供的电源控制卡芯片及内部电路需要的电源来至PC主机电源,通过PC机主板PCI硬件接口提供。
控制卡/器的外部I/O需要的24VDC电源由外部独立电源提供,如明纬,衡浮的24VDC 开关电源。
1、默认的输入Input与输出Output都使用外部24VDC电源。
2、对于外部24VDC电源,要求用户提供单独24VDC开关电源,避免与步进驱动器共用。
电源的输出功率根据实际设备使用的输入、输出的总功率来定,通常开关电源总功率不小于实际需求总功率的1.2倍。
3、关于输出口的驱动能力解释手册上注明采用光耦合隔离输出的,其驱动能力在24VDC电源时为50mA,约1.5W。
运动控制卡应用编程技巧
运动控制卡应用编程技巧1.熟悉运动控制卡的指令集和接口:不同的运动控制卡有不同的指令和接口,首先需要熟悉所使用的运动控制卡的指令和接口。
这样可以更好地理解和掌握编程时的参数设置和指令调用。
2. 使用合适的编程语言:选择适合的编程语言可以更加方便地开发运动控制卡的应用程序。
常用的编程语言有C/C++、Python等。
其中C/C++的性能比较高,适合对实时性要求较高的应用场景;Python则具有简洁易读的特点,适合快速开发和调试。
3.精确控制运动参数:在运动控制卡的编程中,控制运动参数的精确性关系到设备的稳定性和运行效果。
要尽量准确地设置加速度、减速度、速度和位置等参数,并根据具体应用场景进行调整。
在编写控制程序时,可以通过采样和调试等手段来实现精确控制。
4.实现实时控制:对于需要实时控制的场景,需要特别注意处理程序的响应速度。
在编程中,可以使用多线程或中断控制的方式来实现实时性要求,确保控制程序能及时响应和处理运动控制卡的指令。
5.异常处理和错误检测:运动控制卡的编程过程中,需要时刻关注可能出现的异常情况和错误。
在程序中加入相应的异常处理和错误检测机制,可以及时发现和解决问题,提高系统的稳定性和可靠性。
6.数据存储和分析:对于一些特殊应用场景,可能需要将运动控制卡的数据进行存储和分析。
在编程中,可以设置数据采集和存储的机制,并使用相应的分析工具对数据进行处理和分析,从而为后续的优化和决策提供依据。
7.优化程序性能:为了提高运动控制卡应用程序的性能,可以采取一些优化措施。
比如使用合适的数据结构、减少不必要的计算、提高算法效率等。
通过优化程序性能,可以提高系统的响应速度和效率,提升运动设备的运行效果。
总的来说,编程运动控制卡需要熟悉控制卡的指令和接口,选择合适的编程语言,精确控制运动参数,实现实时控制,处理异常和错误,进行数据存储和分析,并优化程序性能。
通过合理应用这些技巧,可以有效地开发和控制运动设备,提高自动化设备的性能和效率。
控制卡应用编程技巧
控制卡应用编程技巧1.合理设计数据结构:在进行控制卡应用编程时,首先需要考虑合理的数据结构设计。
选择适当的数据结构可以提高代码执行效率,减小内存占用,并便于扩展和维护。
例如,使用链表结构来存储数据可以方便地插入和删除节点,而使用数组结构可以提高数据的访问速度。
2.优化算法和算法复杂度:在编写控制卡应用程序时,尽量使用高效的算法来提高程序的执行速度。
可以通过降低算法的时间和空间复杂度来优化程序的性能。
例如,使用二分算法代替线性算法,可以在有序数据中快速找到目标值。
3.合理利用缓存机制:缓存是提高程序执行效率的有效手段。
在控制卡应用编程中,可以使用缓存来存储频繁访问的数据,避免重复计算或IO操作,从而减少系统资源的消耗。
例如,可以将频繁访问的数据存储在高速缓存中,以提高数据的读取速度。
4. 错误处理和异常处理:在编写控制卡应用程序时,需要合理处理各种可能的错误和异常情况。
错误处理和异常处理能够提高程序的稳定性和鲁棒性,并提供更好的程序健壮性。
例如,可以使用try-catch语句块来捕获异常并进行相应的处理,避免程序崩溃。
5.避免内存泄漏和资源泄漏:内存泄漏和资源泄漏是程序开发中常见的问题。
在控制卡应用编程中,需要注意合理管理内存和资源,及时释放不再使用的对象和资源,避免造成内存泄漏和资源泄漏。
例如,在使用完毕后,可以显式地调用释放内存和资源的函数。
6.多线程和并发编程:在控制卡应用编程中,多线程和并发编程可以提高程序的性能和响应能力。
合理使用多线程和并发编程可以并行执行多个任务,充分利用系统资源,并加快程序的响应速度。
例如,可以使用多线程来处理并发请求,提高系统的吞吐量。
7.代码重用和模块化设计:在编写控制卡应用程序时,应鼓励代码的重用和模块化设计。
通过将相关代码封装成函数或类,并进行适当的抽象和封装,可以提高代码的可读性、可维护性和可扩展性。
例如,可以将相似的功能模块进行封装,通过调用函数或对象来实现代码的重用。
雷赛控制产品与伺服驱动配套应用小技巧
雷赛控制产品与伺服驱动配套应用小技巧作者:李军对于一些初次使用雷赛运动控制卡的客户来说,常常会在控制伺服电机时出现一些小问题,以致拖迟客户的发开进度,下面简单介绍一下常出现的3个问题,结合DMC5480控制卡实测的曲线为例,给出解决办法:1、脉冲模式匹配问题伺服驱动器的脉冲模式要与控制卡的脉冲模式保持一致,否则可能导致A.伺服电机只能朝一个方向运动;B.做往返运动时会出现一个方向有累计误差。
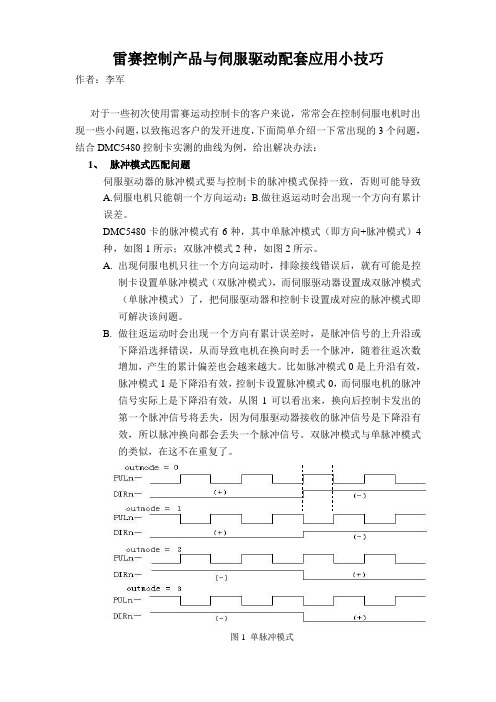
DMC5480卡的脉冲模式有6种,其中单脉冲模式(即方向+脉冲模式)4种,如图1所示;双脉冲模式2种,如图2所示。
A.出现伺服电机只往一个方向运动时,排除接线错误后,就有可能是控制卡设置单脉冲模式(双脉冲模式),而伺服驱动器设置成双脉冲模式(单脉冲模式)了,把伺服驱动器和控制卡设置成对应的脉冲模式即可解决该问题。
B.做往返运动时会出现一个方向有累计误差时,是脉冲信号的上升沿或下降沿选择错误,从而导致电机在换向时丢一个脉冲,随着往返次数增加,产生的累计偏差也会越来越大。
比如脉冲模式0是上升沿有效,脉冲模式1是下降沿有效,控制卡设置脉冲模式0,而伺服电机的脉冲信号实际上是下降沿有效,从图1可以看出来,换向后控制卡发出的第一个脉冲信号将丢失,因为伺服驱动器接收的脉冲信号是下降沿有效,所以脉冲换向都会丢失一个脉冲信号。
双脉冲模式与单脉冲模式的类似,在这不在重复了。
图1 单脉冲模式图2 双脉冲模式2、正确使用伺服使能SEVON信号伺服上电后如果SEVON信号无效,伺服电机不会锁死,控制卡发脉冲给伺服,伺服也不会运动,所以伺服电机运动前一定要使能。
许多客户可能认为伺服使能信号不重要,因此在实际应用中对该信号不予处理,直接导致设备在开机和关机时的异常响应,从而认为整个控制系统出现问题,通过下面的分析可以帮助大家解惑,希望能让大家对SEVON信号有效的帮助到设备的控制有更好的认识。
由于控制卡是插在PC的PCI插槽上的,由PC供给控制卡一个5V的电源,所以PC在开机和关机时,会有一个0-5V的电压变化的,也就是PC在开机和关机时会有一个等同于脉冲信号的电压变化信号发出来,如下述:a, 脉冲输出模式1时,脉冲结束时脉冲口电平状态如下图3:图3 脉冲输出波形图b, 电脑关机时电压曲线如下图4:图4 断电后脉冲输出口电压变化图所以在PC关机时,如果伺服的SEVON有效,而且伺服电机的电源没有提前切断,那么由于图4展示的状态,伺服电机会认为有一个脉冲输入,因此会作出响应,从而产生微小的震动,经过对比测试,国外的伺服要比国内的伺服电机的震动要小很多,有轻微动作,但感觉不明显。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
发布时间:2011年6月1日雷赛科技刘玉平概述:对于一些初次使用雷赛运动控制产品的客户,由于对本公司产品的特点以及程序开发流程不够熟悉,在应用程序的开发过程中,难免会疏漏一些细节,从而产生各种问题,浪费很多宝贵的时间。
如果在应用程序开发前,就可以考虑到那些既重要又容易疏漏的细节,这样可以避免很多不必要的问题产生,从而大大缩短程序的开发周期。
本文总结以往的经验,以雷赛运动控制卡DMC2410B为例,为客户在开发应用程序时的初始化过程给出了一些参考与建议(其他产品与此类似),其中包括运动控制卡的初始化、特殊参数的设置及各种信号的设置,如图1虚线框内所示,这些处理过程必须加载至应用程序的初始化过程中,不同编程环境下,应用程序的初始化过程略有不同,例如在VB6.0编程环境下,须在Form_Load()函数中做程序的初始化处理,而在VC6.0编程环境下,须在OnInitDialog()函数中做程序的初始化处理。
图1 DMC2410B控制卡应用程序开发流程图1所示的控制卡初始化过程中,实线框内所示的参数设置或特殊信号的设置必须在初始化过程中加以处理,而虚线框内的信号在未选择使用时,可以不用设置,而当选择使用这些信号时,必须进行正确设置。
下面对这些初始化过程的方法及必要性做出简要的说明。
一、初始化运动控制卡相关函数:WORD d2410_board_init (void)函数功能:为控制卡分配系统资源并初始化控制卡;若在应用程序中未初始化控制卡,则系统无法为控制卡分配资源,导致控制卡无法正常使用,程序在运行时提示错误,弹出如图2所示对话框:图2 未初始化控制卡时的错误提示注意:程序在结束运行时,必须关闭运动控制卡,以释放系统资源,否则控制卡将一直占用系统资源,导致再次运行该应用程序时产生错误。
关闭控制卡的方法及说明如下:相关函数:Void d2410_board_close (void)函数功能:释放控制卡占用的系统资源。
当程序结束时必须调用此函数,它与d2410_board_init() 函数是一个相反的过程。
二、脉冲参数设置脉冲参数包括指令脉冲类型、脉冲输出有效电平以及方向控制逻辑电平,这些参数需根据电机驱动器的类型及参数来设置,若设置错误时,则会造成控制卡正常发出脉冲,而电机无法正常运转、运转方向错误或只能朝同一个方向运转等现象。
以下为脉冲参数设置的相关函数及说明:相关函数:Void d2410_set_pulse_outmode (WORD axis, WORD outmode )函数说明:设置指定轴的脉冲输出方式。
参数说明:axis 指定轴号Outmode 脉冲输出方式选择,其值如图3所示:图3 脉冲类型的选择三、特殊信号的设置特殊信号包括限位信号、原点信号、急停信号等,对这些特殊信号未进行设置或设置错误时,会导致控制卡无法正常输出脉冲、电机无法正常运转、原点回归错误等现象,下面分别对这些信号的设置及用途加以说明:1. 限位信号的设置相关函数:Void d2410_config_EL_MODE (WORD axis, WORD el_mode) 函数功能:设置限位信号的有效电平及制动方式。
参数说明:axis 指定轴号;el_mode 限位信号的有效电平和制动方式:0-立即停、低电平有效;1-减速停、低电平有效;2-立即停、高电平有效;3-减速停、高电平有效;限位信号的有效电平需根据所使用的限位开关的类型进行设置,DMC2410B控制卡默认为低电平有效,若有效电平设置错误,则控制卡会认为相应轴遇到限位信号而停止输出脉冲。
2. 原点信号的设置相关函数:Void d2410_set_HOME_pin_logic (WORD axis, WORD org_logic, WORD filter)函数功能:设置原点信号的有效电平以及允许/禁止滤波功能。
参数说明:axis 指定轴号;org_logic 原点信号的有效电平:0-低电平有效;1-高电平有效;filter 允许/禁止滤波功能:0-禁止;1-允许;原点信号的有效电平需根据所使用的原点开关的类型进行设置,DMC2410B控制卡默认为低电平有效,若有效电平设置错误,则会导致回原点运动无法启动、回原点方向相反、未遇到原点信号时回原点动作立即结束等现象。
3. 急停信号的设置相关函数:Void d2410_config_EMG_PIN (WORD cardno, WORD enable, WORD emg_logic)函数功能:急停信号设置。
急停信号有效时会立即停止所有轴脉冲的输出。
参数说明:cardno 卡号enable 电平设置使能:0-电平设置无效;1-电平设置有效;emg_logic 急停信号的有效电平:0-低电平有效;1-高电平有效;急停信号的有效电平需根据所使用的急停开关的类型进行设置,DMC2410B控制卡默认为低电平有效,若有效电平设置错误,则控制卡会认为收到急停信号而停止所有轴的脉冲输出。
四、伺服专用信号的设置伺服专用信号是针对伺服电机和驱动器而设置的,包括伺服使能信号、报警信号、误差清除信号、零相信号、编码器反馈输入模式等,当无特殊要求时,可以选择不用控制卡去控制这些信号,但若选择使用这些信号时,必须在程序的初始化过程中进行正确的设置,否则会导致控制卡无法正常输出脉冲、伺服电机无法正常运转、编码器反馈计数无法读取或计数错误等现象,下面分别对这些信号的设置加以说明:1. 伺服使能(Sevon)信号的设置伺服使能信号的有效电平是通过控制卡的拨码开关进行设置,如图4所示,DMC2410B控制卡默认为高电平有效,若此电平设置错误,则会出现控制卡正常输出脉冲,而伺服电机的轴未锁紧而无法运转的情况,此信号端子可用软件控制,其相关函数及说明如下:相关函数:Void d2410_write_SEVON_PIN (WORD axis, WORD on_off);函数功能:输出对指定轴的伺服使能端子的控制参数说明:axis 指定轴号on_off 设定伺服使能电平状态:0-低电平;1-高电平。
注意:其中SEVON 输出口初始状态可选, 当拨码开关对应的位置为OFF后, 则SEVON 的电平逻辑会取反。
图4 伺服使能信号电平的设置2. 伺服报警(Alarm)信号的设置相关函数:Void d2410_config_ALM_PIN (WORD axis, WORD alm_logic, WORD alm_action)函数功能:设置伺服报警信号的逻辑电平及其工作方式参数说明:axis 指定轴号alm_logic ALM信号的有效电平:0-低电平有效;1-高电平有效;alm_action ALM信号的制动方式:0-立即停止;1-减速停止;ALM信号的有效电平需根据伺服驱动器进行设置,DMC2410B控制卡默认为低电平有效,若此电平设置错误,则控制卡会认为相应轴发出报警信号而停止输出脉冲。
3. 伺服误差清除(ERC)信号的设置相关函数:Void d2410_config_ERC_PIN (WORD axis, WORD enable, WORD erc_logic,WORD erc_width, WORD erc_off_time)函数功能:设置允许/禁止ERC 信号及其有效电平和输出方式参数说明:axis 指定轴号enable: 0-不自动输出ERC 信号1-自动输出ERC 信号erc_logic 设置ERC信号的有效电平:0-低电平有效;1-高电平有效;erc_width ERC信号的有效输出宽度:单位:userc_off_time ERC信号的关断时间:单位:us伺服电机是根据位置误差计数器运转的,若将位置误差计数器清零,则伺服电机立即停止运行,而误差清除(ERC)信号便是用来清除位置误差计数器的,若此信号的模式及有效电平设置错误,当控制卡正常输出脉冲时,而伺服驱动器的位置误差计数器一直处于清零状态,故电机无法运行。
4. 伺服零相(EZ)信号的设置相关函数:Void d2410_config_EZ_PIN (WORD axis, WORD ez_logic, WORD ez_mode)函数功能:设置指定轴的EZ 信号的有效电平及其作用。
参数说明:axis 指定轴号ez_logic EZ信号的有效电平:0-低电平有效;1-高电平有效;ez_mode EZ信号的工作方式:0-EZ 信号无效;1-EZ 是计数器复位信号;EZ信号可以用来精确回原点运动及复位编码器反馈位置计数器,若此信号的有效电平及工作方式设置错误,则控制卡会一直复位编码器反馈位置计数器,导致无法读取编码器的反馈位置。
5. 编码器反馈输入模式的设置相关函数:Void d2410_counter_config (WORD axis, WORD mode)函数功能:设置编码器输入口的计数方式。
参数说明:axis 指定轴号mode 编码器反馈输入模式:0-非A/B 相脉冲(脉冲+方向);1-1倍A/B 相脉冲信号;2-2倍A/B 相脉冲信号;3-4倍A/B 相脉冲信号;DMC2410B控制卡的反馈位置计数器能接收两种模式的脉冲输入:非A/B 相(脉冲+方向)模式和A/B相输入模式,这需要根据编码器的类型进行设置,若此模式设置错误,则会造成计数器无法计数或只能朝一个方向计数以及计数值错误等现象。
总结:综上所述,若在应用程序的开发过程中未对控制卡进行正确初始化处理时,会给整个开发过程带来很多不必要的麻烦,而细致全面的初始化过程则可以在程序开发的初期避免这些问题和麻烦的产生,从而使整个程序开发过程事半功倍!因此,建议大家自己创建一个初始化函数,将上面描述的各项相关参数包容到其中,然后在应用程序里边再调用,以方便当前项目开发和后续其他的项目开发。