天文导航2
天文导航发展趋势及其关键技术

K e r : Cee t l vg to ; De eo me t e d Ke e h oo is y wo ds lsi iain a Na v lp n n ; Tr yT c lge n
天文导航是利用对 自然天体的测量来确定 自 身的位置和航 向的导航技术。由于天体的位置是已 知的, 利用光学系统测量天体相对于导航用户参考
采用C MOS P 天体 敏感 器代 替 C D敏 感器 , S A C
提高辐射阻抗 、扩大的动态范围;采用大视场 、小 焦距且经过严格标校后 的高精度光电摄像系统,以
・9 3 0・
现代导航
2 1 生 01
33开 发人造 天体射 电导 航技 术 ‘
跟踪器等高精度天文导航系统使得天文 导航技术
设备简单造价低 ,便于推广应用,适用范围广的本
参考文献:
质特征,并为高精度、全天候天文导航技术的实现 [】 房建成,宁晓琳. 1 天文 导航原理及应用[ I .北京:北京 提供了条件 。 航 空航天大学 出版社, 0 6 20
实现高精度天文导航 。
32 发展 射 电技术 ,开 发全 天候导 航 系统 . 天文 导航 可分 为星光 导航 和射 电天文 导航 ,星 光导 航在天 体辐 射 的可见 光波 段实施 观测 ,射 电天 文导 航 则是 在天 体辐 射 的无 线 电信 号( 电信号) 射 波 段实 施测量 。星光 导航 由于受 气象条 件影 响严重 ,
候 高精 度天 文 导航 的必然选 择 。然 而 ,射 电天 文技
23基 于“ . 多星 矢量 定位技 术” 的大 视场 天文
导航 系统
术的特征之一,是 以地固基线作为地方矢量,并且 基线长度甚长,不便于在运动载体上直接应用 ,必 须消除地固矢量的制约, 研究不需要地固地方矢量
天文导航第2章 球面几何
17
天文导航原理及应用
2.2 球面三角
计算菲尔德和彼得堡之间小圆弧航 线的距离公式为:
在纬度53°23/N的圆弧周长=2πr,
其中,r = R cos AOC, AOC =
53°23´ = 53.3833°。 图中的红色弧ARB是这个圆周的一
部分,因此,
ARB = (160°.1667/360°)x2π
➢角的基本性质 1 球面三角形三角之和大于180Ο,小于540Ο。 2 球面三角形两角之和减去第三角小于180Ο。
➢边、角间的基本性质 边角存在对应关系,等边对等角;等角对等边;大边对大角。
13
天文导航原理及应用 2.3 球面三角
2.3.4 球面三角形的面积
球面S2 ( O , 1) 上球面三角形ABC 的面积为
原球面三角形与其极线三角形的关系
1 若一球面三角形是另一球面三角形的极线三角形,则这一球面三角 形也是前一球面三角形的极线三角形,即二者互为极线三角形。 2 极线三角形的边(角)与原球面三角形的角(边)互补。
12
天文导航原理及应用
2.3 球面三角
2.3.3 球面三角形的边角基本性质 ➢边的基本性质 1 球面三角形三边之和大于0Ο,小于360Ο。 2 球面三角形两边之和大于第三边,两边之差小于第三边。
cos AYB = (cos 36°.6167)2 + (sin 36°.6167)2 cos 160.1667° AYB = 71°.9663 = 71°58´ = 4318´.
因此菲尔德和彼得堡之间的大圆弧航线(黄色弧)距离是4318个海里,该
航线所需的时间为4318/500=8.636h=8h38m。
15
天文导航原理及应用
天文导航的原理及应用
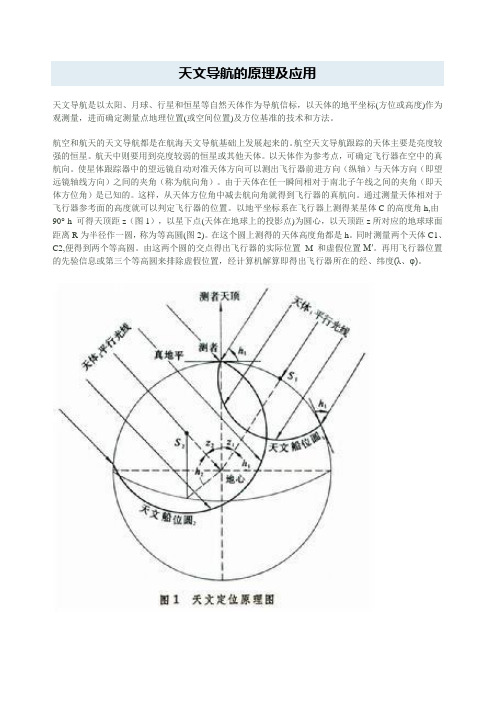
天文导航的原理及应用天文导航是以太阳、月球、行星和恒星等自然天体作为导航信标,以天体的地平坐标(方位或高度)作为观测量,进而确定测量点地理位置(或空间位置)及方位基准的技术和方法。
航空和航天的天文导航都是在航海天文导航基础上发展起来的。
航空天文导航跟踪的天体主要是亮度较强的恒星。
航天中则要用到亮度较弱的恒星或其他天体。
以天体作为参考点,可确定飞行器在空中的真航向。
使星体跟踪器中的望远镜自动对准天体方向可以测出飞行器前进方向(纵轴)与天体方向(即望远镜轴线方向)之间的夹角(称为航向角)。
由于天体在任一瞬间相对于南北子午线之间的夹角(即天体方位角)是已知的。
这样,从天体方位角中减去航向角就得到飞行器的真航向。
通过测量天体相对于飞行器参考面的高度就可以判定飞行器的位置。
以地平坐标系在飞行器上测得某星体C的高度角h,由90°-h 可得天顶距z(图1),以星下点(天体在地球上的投影点)为圆心,以天顶距z所对应的地球球面距离R为半径作一圆,称为等高圆(图2)。
在这个圆上测得的天体高度角都是h。
同时测量两个天体C1、C2,便得到两个等高圆。
由这两个圆的交点得出飞行器的实际位置M 和虚假位置M′。
再用飞行器位置的先验信息或第三个等高圆来排除虚假位置,经计算机解算即得出飞行器所在的经、纬度(λ、φ)。
天文导航的分类按星体的峰值光谱和光谱范围分,天文导航可分为星光导航和射电天文导航。
观测天体的可见光进行导航的叫星光导航,而接收天体辐射的射电信号(不可见光)进行导航的叫射电天文导航。
前者可解决高精度昼夜全球自动化导航定位,后者可克服阴雨等不良天气影响,通过探测射电信号进行全天候天文导航与定位。
根据跟踪的星体数,天文导航分为单星、双星和三星导航。
单星导航由于航向基准误差大而定位精度低,双星导航定位精度高,在选择星对时,两颗星体的方位角差越接近90°,定位精度越高。
三星导航常利用第三颗星的测量来检查前两次测量的可靠性,在航天中,则用来确定航天器在三维空间中的位置。
导航技术及其发展
导航技术及其发展导航技术是指通过各种手段确定自身位置、方向和速度的技术,是现代社会中不可或缺的一部分。
它广泛应用于军事、航空、航海、汽车、手机等领域,极大地提高了人们的生活质量和工作效率。
本文将从导航技术的发展历程、主要技术及其应用前景三个方面进行探讨。
一、导航技术的发展历程1. 古代导航技术在古代,人们主要依靠天文导航、地文导航和经验导航进行定位。
天文导航是通过观测天体位置来确定自身位置的方法,如我国古代的航海家郑和就是利用天文导航技术实现了七次下西洋的壮举。
地文导航则是根据地形、地貌等地理特征来确定位置,如古代丝绸之路上的商队就是利用地文导航技术进行贸易往来。
经验导航则是依靠船员的经验和直觉来判断航向和距离。
2. 近代导航技术随着科学技术的发展,近代导航技术逐渐从经验导航向仪器导航转变。
19世纪末,无线电技术的发明为导航技术的发展提供了新的动力。
1906年,德国人布劳恩首次利用无线电波进行航海导航实验,标志着无线电导航技术的诞生。
随后,各种无线电导航系统如罗兰(Loran)、奥米加(Omega)等相继问世,为航海、航空等领域提供了准确的导航服务。
3. 现代导航技术20世纪70年代,美国开始研发全球定位系统(GPS),并于1994年全面建成。
GPS具有全球覆盖、全天候、高精度等特点,迅速成为现代导航技术的主流。
随后,俄罗斯、欧盟等国家和地区也相继研发了自己的全球导航卫星系统(GLONASS、Galileo等),形成了全球导航卫星系统的竞争格局。
我国自主研发的北斗卫星导航系统(BDS)也于2000年发射成功,并于2020年全面建成,成为全球四大卫星导航系统之一。
二、主要导航技术1. 天文导航天文导航是通过观测天体位置来确定自身位置的方法。
古代的天文导航主要依靠肉眼观测,现代天文导航则利用天文望远镜、星敏感器等设备进行观测。
天文导航具有高精度、不受环境限制等优点,但受天气影响较大。
2. 地文导航地文导航是根据地形、地貌等地理特征来确定位置的方法。
天文导航基础(四)

探测器上自身携带的量测设备,通过观测天体 进行天文导航的方法。
5.4深空探测器的自主天文导航
天文导航作为辅助导航手段
水手9号拍摄的火卫二图像
海盗号的天文导航
5.4深空探测器的自主天文导航
海盗号的天文导航
水手9号的天文导航
5.4深空探测器的自主天文导航
旅行者号的拍摄的海王星及其卫星
5.4深空探测器的自主天文导航
深空探测器天文导航的关键技术和发展趋势 • 一类是与自主天文导航理论和方法相关的关键技术; • 一类是与导航系统硬件相关的关键技术。
天文导航理论 状态方程的精确建模 新型测量原理和相应量测方程的建立 先进滤波方法及相应的理论在天文导航中的应用 天文组合导航方法
5.4深空探测器的自主天文导航
天文导航系统技术
观测量示意图
5.1.3基于 “日-地-月”导航
通过观测日-地-月信息,确定地心赤道惯性坐标系下的 航天器位置矢量。
几何关系及观测量示意图
5.1.3基于 “日-地-月”导航
几何关系示意图
5.1.4基于星光折射的天文导航方法
• 通过星光折射间接敏感地平方法,是80年代初发 展起来的一种航天飞行器低成本自主定位方案。
5.4深空探测器的自主天文导航
观测量及观测方程
行星的视角
恒星仰角
5.4深空探测器的自主天文导航
观测量及观测方程
掩星观测
5.4深空探测器的自主天文导航
观测量及观测方程
一个近天体和一个远天体间的夹角
夹角确定的位置面
5.4深空探测器的自主天文导航
观测量及观测方程
两个近天体间的夹角确定位置面
两个近天体间的夹角
5.5射电天文导航
天文导航第10章 星光折射间接敏感地平天文导航方法
位置估计误差
1200
速度估计误差
6
估计误差
滤波方差
1000
5
估计误差 滤波方差
800
4
600
3
400
2
200
1
0 0
50
100
150
200
250
300
350
400
0 0
50
100
150
200
250
300
350
400
t /min
t /min
位置估计误差约150m(1σ),速度估计误差约0.18m/s(1σ)。
150
100
50
0
0
1
2
3
4
5
6
折射角获取精度 /″
30
天文导航原理及应用
10.3.2 影响因素分析
3、一个轨道周期内折射星观测次数
位置估计精度/m
500
450
400
350
300
250
200
150
100
50
200
400
600
800
1000
1200
1400
1600
一个轨道内观测折射星出现的次数
31
天文导航原理及应用
时间/min
速度估计误差
4.5
4
3.5
3
2.5
2
1.5
1
0.5
0
0
50 100 150 200 250 300 350 400 450
时间/min
图 1 在大气高度 20km-25km 范围内基于折射角的仿真结果
低轨地球卫星自主天文导航基本原理PPT课件
School of Geodesy and Geomatics
1
标题添加
点击此处输入相 关文本内容
前言
点击此处输入 相关文本内容
标题添加
点击此处输入相 关文本内容
School of Geodesy and Geomatics
点击此处输入 相关文本内容
2
目录
第一章 第二章 第三章 第四章 第五章 第六章 第七章
i1 • i1 cos1 ir • i2 cos2
ir• rpr Nhomakorabearp
r
co
s
3
School of Geodesy and Geomatics
15
纯天文解析导航实例
• 式中,i1,i2为太阳到恒星1和恒星2的单位矢量;r为航天器 相对太阳的位置矢量;rp为地球相对太阳的位置矢量。
• 求解该方程组可得到航天器的位置,但满足该方程的解不 是唯一的。
• 从几何上看,即为两个圆锥面的交线有两条,且这两条交 线与超环面的交点也不唯一。
• 该模糊度可通过航天器位置的预估值或增加观测量来消除。
第八章
天文与深空导航的理论基础 天文导航的天体敏感器 低轨地球卫星自主天文导航基本原理 深空探测器的自主天文导航原理与方法 VLBI技术用于深空探测器导航的原理与方法 USB技术用于深空探测器导航的原理与方法 脉冲星测量技术用于深空探测器自主导航的原 理与方法 其他导航技术在深空探测中应用与国内外深空 探测计划
12
3.1.3纯天文几何解析方法基本原理
⑤这两个圆锥相交便确定了两条位置线,航天器就位于这两 条位置线的一条上,模糊度可以通过观测第三颗恒星来 消除。
• 但是,航天器位置的大概值一般已知,因此,航天器的 实际位置线通
天文导航的原理和应用pdf
天文导航的原理和应用pdf1. 引言天文导航是一种利用天体的位置和运动来确定地球或其他天体位置的方法。
天文导航的原理基于天体的固有属性和运行轨迹,通过观测和测量天体的位置和运动,可以确定导航者所处位置的方法。
本文将介绍天文导航的基本原理和其在实际应用中的具体场景。
2. 天文导航的基本原理天文导航的基本原理是利用天体的位置和运动来确定导航者所处位置的方法。
具体而言,天文导航依赖于以下几个关键要素:• 2.1 天体位置测量导航者需要准确地测量天体的位置。
这通常通过使用天文仪器如望远镜进行观测,并结合星表等工具来确定天体的准确位置。
• 2.2 天体运动测量天体的位置随时间变化,因此导航者需要测量天体的运动。
这可以通过观测天体在不同时刻的位置来实现,然后利用数学模型推算天体的运动轨迹。
• 2.3 天体运动模型为了准确地推算天体的位置和运动轨迹,导航者需要建立一定的天体运动模型。
这个模型可以基于天体的物理性质和行星力学原理来构建,并结合天文观测数据进行校准和验证。
• 2.4 导航计算方法最后,导航者需要利用测量到的天体位置和运动信息,结合天体运动模型,进行导航计算。
这个计算过程可以通过数学模型和算法来实现,以确定导航者所处的位置。
3. 天文导航的应用场景天文导航在实际应用中有广泛的应用场景。
以下列举了几个常见的应用场景:• 3.1 航空航天导航天文导航在航空航天领域有着重要的应用。
航空器和宇宙飞船可以通过测量天体的位置和运动来确定自身的位置,从而进行准确的导航和定位。
• 3.2 地理导航天文导航也可以应用于地理导航。
通过观测和测量地球上不同位置的天体,如太阳、北极星等,可以确定观测地点的经纬度等地理信息,从而实现导航和定位。
• 3.3 海上导航在海上航行中,天文导航可以帮助船舶准确地确定自身的位置。
通过测量太阳、月亮和恒星等天体的位置和运动,船舶可以使用天文仪器和导航工具确定自己的经度和纬度。
• 3.4 太空探索天文导航在太空探索中也具有重要的应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1,建立系统的状态模型(状态方程)
系统状态模型即卫星轨道动力学模型
dx dt v x dy v y dt dz v z dt z2 dv x x 1 J Re 7 .5 2 1 .5 Fx 2 3 dt r r r dv y y z2 Re 3 1 J 2 7 .5 2 1 .5 Fy r r r dt z z2 Re dv z 7 .5 2 4 .5 Fz dt r 3 1 J 2 r r
离散化,并在
处线性化
ˆ (k 1 / k ) X
ˆ ( k 1 | k ), k 1] h [ X ˆ ( k 1 | k ), k 1] Z ( k 1) h[ X X ( k 1) ˆ ( k 1|k ) X ( k ) X ˆ ( k 1 | k )] V ( k 1) [ X ( k 1) X
航天器自主天文导航系统模型存在确定性误 差和随机误差,无法准确建立导航系统的状 态模型,所以要获得高精度状态估值,必须 要用量测信息和先进的滤波方法对系统的状 态量即位置、速度等导航信息进行实时估计。
3
2.4 天体敏感器分类
• 按照敏感天体的不同
地球敏感器、太阳敏感器、恒星敏感器、月球敏感器、行星敏感器、脉冲 星敏感器等。
Wj 1
2 2 sx ( x j x0 ) 2 s y ( y j x0 ) 2 f 2
s x ( x j x0 ) s ( y y ) 0 y j f
星敏感器 透镜 光轴指向
f Ys
cos i cos i Ri sin cos i i sin i
• 按照所敏感光谱的不同
• 可见光敏感器、红外敏感器、紫外敏感器、X射线脉冲星敏感器、磁场敏 感器等 • 紫外敏感器:是一种新型敏感器,可以敏感恒星、月球、太阳、地球,抗 干扰性强
• 按照光电敏感器件不同
CCD(Charge Coupled Device)天体敏感器和CMOS APS (Complementary Metal-Oxide-Semiconductor Active Pixel Sensor) 天体敏感器 CCD和CMOS各自优缺点
21
2,星光仰角:指从飞行器上观测到的导航恒星与
地球边缘的切线方向之间的夹角
s Υ 星光仰角
飞行器
r
Re 地球
飞行器轨道
Re sr arcsin 星光仰角Υ的表达式为: arccos r r 22
Re sr arccos arcsin 星光仰角Υ的表达式为: r r 其中r是卫星在地心惯性球坐标系中的位置
• 恒星敏感器(star sensor, star tracker)
恒星敏感器工作过程
信号处理
星像 提取
导航星库
星图 识别
姿态 计算
姿态输出
地球卫星的轨道动力学模型为二体问题,
其天文导航系统的模型相对简单,我们 以地球卫星为例学习基于轨道动力学的 自主天文导航原理。 根据原理,自主天文导航包括三个部分: 1,建立系统的状态模型 2,建立量测模型 3,估计
17
式中 r
x y z 为卫星位置矢量参数 (x,y,z)卫星在惯性坐标系下X、Y、Z方向的位 置 (vx,vy,vz)卫星在惯性坐标系下X、Y、Z方向的 速度 μ是地心引力常数 J2为地球引力系数 ДFx、 ДFy 、 ДFz为地球非球形的高阶摄动、 日月摄动以及太阳光压力摄动和大气摄动 等
矢量 s是导航星光方向的单位矢量 Re是地球半径
量测方程为:
Re sr Z ( k ) v arccos arcsin r r
v
23
量测方程
r s Z ( k ) v arccos v r
cos j cos j R j sin j cos j sin j
Wi(xi,yi)
W i W j Bi B j
2016年12月29日星期四6 时29分15秒
Wj(xj,yj)
Os (x0,y0)
Xs
像平面
2.4.1 天体敏感器介绍
量测方程
选择滤波器方法 扩展卡尔曼滤波
扩展卡尔曼滤波递推方程 组合导航
ˆ ( k | k ), k ] K ( k 1){Z ( k 1) h[ X ˆ ( k 1 | k ), k 1]} X ( k 1) [ X
K ( k 1) P ( k 1 | k ) H T ( k 1)[ H ( k 1) P ( k 1 | k ) H T ( k 1) R k 1 ]1 ˆ ( k | k ), k ]Q T [ X ˆ ( k | k ), k ] P ( k 1 | k ) [ k 1, k ] P ( k | k ) T [ k 1, k ] [ X
s
飞行器 r
α星光角距
飞行器轨道 地球
20
rs 星光角距α的表达式为: arccos r
其中r是卫星在地心惯性球坐标系中的位置
矢量,由地平敏感器获得 s是导航星光方向的单位矢量,由星敏感 器获得
rs 量测方程为:Z ( k ) v arccos v r
2 2 2
18
系统状态方程简写为:
(t ) f ( X , t ) w(t ) X
式中,状态矢量 X [ x 误差矢量 w(t ) [0 0 0
y
Fx
z vx
Fy
vy
v z ]T
Fz ]T
19
2,建立量测方程(观测方程)
1,星光角距:指从飞行器上观测到的导航恒星星 光的矢量方向与地心矢量方向之间的夹角
k
P ( k 1 | k 1) [ I K ( k 1) H ( k 1)] P ( k 1 | k ) [ x ( k ), k ] [k 1 | k ] X ( k ) X ( k ) Xˆ ( k |k )
星光非常微弱,信号检测比较困难,需要使用高灵敏度的图像传感器 (CCD或者APS)
能够直接输出三轴姿态信息
2.4.1 天体敏感器介绍
• 恒星敏感器(star sensor, star tracker)
恒星敏感器工作原理 Zs
天球
星敏感器 透镜 光轴指向
f Ys Xs
(x,y)
Os (x0,y0)
天文导航
1,概述
2,天文导航位置面的概念
3,基于纯天文几何解析法的天文导航原理
4,基于星敏感器的姿态确定算法
5,基于轨道动力学方程的天文导航原理
1
航天器自主天文导航法(导航)。
2
2.4 基于轨道动力学的自主天文导航原理
根据航天器运行规律建立状态模型、以天文 观测信息建立量测模型,利用先进的估计方 法获得航天器的运动参数。
?
? xI ( x, y )dxdy X ? I ( x, y )dxdy 重心法 yI ( x, y )dxdy Y I ( x, y)dxdy
观测星
通过星图识别
恒星识别 星图识别
像空间坐标系(OS-xSySzS):zS
Zs
天球坐标
2.4.1 天体敏感器介绍
• 地球敏感器(Earth sensor)
利用光学手段获取飞行器相对地球姿态信息的姿态敏感器 确定飞行器与地球球心连线的矢量方向 红外地平仪:工作波段14-16um 测量飞行器的俯仰姿态角和滚动姿态角 紫外地球敏感器:工作波段:330nm-360nm, 280nm-300nm更佳, 地球的像
(x, y)——像平面的坐标 f——相机镜头焦距 (sx, sy)——像元大小
2016年12月29日星期四6 时29分15秒
(x,y)
Os (x0,y0)
Xs
星像坐标
像平面
恒星识别 星图识别
根据几何特征进行匹配以确定观测星与导航
星的对应关系 几何特征:星对角距 ∠SiOiSj
Si(αi,δi)
xi
yi
S i Oi S j arccos( Ri R j )
恒星识别 星图识别
识别原则:星对角距 不变性 ∠SiOiSj
( xi , y i )
( xi , y j )
1
Si(αi,δi)
Zs
Sj(αj,δj)
s x ( xi x0 ) s ( y y ) Wi i 0 2 2 2 2 2 y s x ( xi x0 ) s y ( yi x0 ) f f
轴沿着光轴往外;xS和yS轴 分别平行于像平面坐标的 相应轴
f
星敏感器 透镜 光轴指向
Ys
X S s x ( x x0 ) 1 s ( y y ) WS Y 0 S y 2 2 2 2 2 s ( x x ) s ( y y ) f x 0 y 0 f ZS
CO2 地球像 像平面
地球敏感器面阵
2.4.1 天体敏感器介绍
• 地球敏感器(Earth sensor)
地球
地球的像
地球敏感器面阵
2.4.1 天体敏感器介绍
• 地球敏感器(Earth sensor)
a 地球