单轨自移设备列车系统的设计及应用
基于自动重联的列车网络控制系统在新型跨座式单轨上的应用

基于自动重联的列车网络控制系统在新型跨座式单轨上的应用近年来,跨座式單轨车辆技术正在逐步向轻量化、节能、环保快速迈进,要求列车网络系统向高性能、高水平发展,以确保新型跨座式单轨实现模块化、轻量化的目标。
同时增加WTB总线,列车可以快速自动连挂、解编运行,增加车辆运营灵活性。
标签:跨座式单轨;列车网络系统;应用1 新型跨座式单轨列车网络系统1.1 列车总线的选择列车网络系统包含三级网络总线:列车级、车辆级以及子系统(设备)级总线,此外,还可以额外搭建用于列车设备维护的网络。
可以根据需求自由选择总线。
(1)列车级网络对数据传输率以及传输距离都有一定的要求,其数据传输量也较多,与此同时,列车级网络对可靠性、实时性、确定性和安全性也有较高的要求,因此需要被选总线在铁路网络上有较为成熟的技术沉淀。
考虑到这些需求,应选择较为符合的MVB总线作为列车级网络总线。
(2)车辆级网络对数据传输的距离和吞吐量要求不太高,但却对可靠性、实时性、确定性等有较高的要求,可选择跟列车级网络相同的MVB总线,使得车辆级网络更加容易接入列车级网络,数据传输更加便捷,更容易实现。
同时,也可以选择成本较低的CAN总线,通过CAN/MVB网关实现接入列车级网络。
(3)子系统(设备)级需要很高的数据实时性、确定性和可靠性,同时应考虑设备更加容易接入总线。
因此,对于不具备MVB接口的设备可以考虑选择CAN总线,而对于具备MVB接口的设备则应选择直接接入MVB总线。
这两种选择都能很好的满足网络的需求。
(4)列车维护网络不参与TCMS系统的工作,因此不需要满足TCMS网络的实时性、确定性等要求。
此外,为了维护方便,列车维护网络应该考虑更加容易组网,数据更容易共享,同时具备较高的数据传输率等要求。
因此,应选择具备多种组网方式、资源共享能力强、传输速率超高的以太网总线。
(5)对于经常需要联挂或解编的列车,考虑选用WTB总线,以满足要求。
因此,新型单轨车的列车网络系统,采用WTB总线为列车总线,WTB总线仅用于列车的重联;采用MVB总线为列车总线及车辆总线用于过程数据传输;采用以太网构建维护网络。
单轨交通设计规范

单轨交通设计规范1. 引言单轨交通作为一种新兴的城市交通方式,在城市交通规划中扮演着重要的角色。
为了保证单轨交通系统的安全、高效运营,制定一套统一的设计规范是必要的。
本文将结合国内外单轨交通的实际情况,提出一系列单轨交通设计规范,以期对单轨交通的规划、设计和建设起到指导作用。
2. 设计原则在进行单轨交通设计时,需要遵循以下原则:单轨交通系统的安全性是设计的首要原则。
在设计时,需要考虑车辆和基础设施的安全性,采取合适的安全措施,确保乘客和工作人员的安全。
2.2 高效性原则单轨交通系统的高效性是设计的关键原则。
在设计时,需要考虑车辆的运行速度、站点布局以及与其他交通工具的衔接等因素,以提高单轨交通系统的运输效率。
2.3 环保性原则单轨交通系统的环保性是设计的重要原则。
在设计时,需要考虑减少能源消耗和减少污染排放的措施,以达到可持续发展的目标。
单轨交通系统的舒适性是设计的关注点之一。
在设计时,需要考虑乘客的乘坐舒适度,包括座椅设计、车厢噪音和车辆稳定性等因素。
3. 设计要求3.1 轨道设计要求单轨交通的轨道设计要求如下:•轨道线路应保持平整,无明显的颠簸和凹凸。
•轨道的曲线半径应满足列车的运行要求,确保列车安全平稳地通过。
•轨道的坡度应适宜,以保证列车的运行速度和乘坐舒适度。
3.2 车辆设计要求单轨交通的车辆设计要求如下:•车辆结构应具备坚固稳定的特点,以保证乘客和工作人员的安全。
•车辆内部布局应合理,充分考虑乘客的乘坐舒适度,包括座椅、扶手和通风系统的设计。
•车辆应具备高效的动力系统和制动系统,以确保列车的高效运行和安全停车。
3.3 站点设计要求单轨交通的站点设计要求如下:•站点的位置应合理,便于乘客进出,且与周边交通工具的换乘衔接良好。
•站点的建筑设计应与城市的风格相协调,充分考虑乘客的行进路线和舒适度。
•站点的设施应完善,包括候车亭、标识牌、自动售票机等,以提高乘客的出行体验。
3.4 信号控制要求单轨交通的信号控制要求如下:•信号控制系统应确保列车的正常运行和停车,避免事故和拥堵的发生。
单轨无坑式移车台电控系统的设计与开发_硕士学位论文

重庆大学硕士学位论文单轨无坑式移车台电控系统的设计与开发姓名:黄克海申请学位级别:硕士专业:机械电子工程指导教师:杨继东2010-05摘要移车台是工程车平行转轨作业必备的专用设备。
移车台的发展先后经过了坑式移车台和无坑式移车台。
无坑式移车台具有厂区占地面积少、组织物流运输合理、配套工程费用低等优点,从而降低了工厂投资和生产成本。
据有关资料介绍, 发达国家如日本的麓岛工厂, 德国的IEC 检修工厂等均采用了无坑式的移车台。
本文分析了移车台的运行特点、技术要求和技术参数,确定了变频调速系统。
变频调速系统采用一台变频器驱动两个电机,实现移车台的变速走行,并结合对位传感器使跨度较大的移车台运行同步和对位准确。
移车台电气控制系统主要有PLC、工业触摸屏、变频器和各种传感器等组成。
文中完成了电控系统硬件的选型和组态,详细设计了电气原理图、PLC输入/输出接线图。
移车台PLC控制系统应用了CC-LINK现场总线技术,极大的减少了现场接线工作,提高了系统的抗干扰性。
移车台属于轻轨车场的大型关键设备,一旦出现事故,将会对人身和经济带来巨大的损失,因此要求移车台运行过程中安全可靠。
本文对移车台的抗倾覆性进行了详细分析计算,从电气上和机械上设计了各种安全保障措施,确保移车台安全、可靠运行。
硬件设计完成后,进行了PLC软件和触摸屏软件的编写。
通过PLC和触摸屏的通信,使用户通过触摸屏可以很方便地实现移车台手动运行、自动运行、参数设定和故障报警记录查询等。
关键词:单轨交通,移车台,PLCABSTRACTTravelling platform is the key special equipment, for engineering vehicles parallel alternating. The development of traveling platform has gone through two stages: the stage of pit style, and the stage of no pit style. A no pit traveling platform covers an area of small, organized logistics transport reasonably, and low cost package, which reduces plant investment and production costs. According to relevant data, the developed countries such as Japan's Kashima Plant, IEC overhaul facility in Germany all adopts pit-style Travelling platform.This paper analyzed operational features of traveling platform, process requirement and technical parameters, to determine a frequency conversion and variable speed control system. The control system of frequency converter uses a frequency converter to drive the two active motor for variable speed operation of traveling platform, combined with sensors in a location Synchronous operation and high position accuracy become a reality.The electrical control system of traveling platform mainly includes PLC, industrial touch screen, frequency converter, a variety of sensors and etc. this paper com pleted the electrical control system hardware selection and configuration, detailed design of electrical schematics, PLC input / output wiring diagram. PLC control system for travelling platform applied CC-LINK fieldbus technology, greatly reducing spot connections, improves anti-interference performance.Travelling platform is a large key equipment in light rail yard, the event of an accident, will bring great personal and economic losses, thus it is necessary that travelling platform run safely and reliably. In this paper, anti-tipping stability of travelling platform carried out a detailed analysis and calculation, from the electrical and mechanical design on a variety of security measures to ensure travelling platform safe and reliable operation.After the completion of the hardware design, programs the software of the PLC and touch screen software. By PLC and touch screen communication, so users can easily bring out manual operation, automatic operation, parameter settings and fault alarm record searching.Key words: monorail train transportation, Travelling platform, PLC1 绪论1.1课题背景重庆是长江上游最大的中心城市,人口密集,内聚力很强。
钢轨调直机的自动化控制系统设计与应用

钢轨调直机的自动化控制系统设计与应用自动化控制系统在工业领域中扮演着至关重要的角色,它能够提高生产效率、减少人工操作、提高安全性,并能够有效地解决一些传统工艺中存在的问题。
本文将重点介绍钢轨调直机的自动化控制系统的设计与应用,以帮助读者更好地理解其原理和功能。
钢轨调直机是一种用于调整铁路钢轨形状的设备,其作用是通过对钢轨施加力或压力来消除其在使用过程中产生的曲线,保证铁路线路的稳定和平顺。
传统的钢轨调直机操作复杂且需要大量人工参与,而自动化控制系统的引入使得整个过程能够更加高效和精确。
首先,在自动化钢轨调直机系统中,使用传感器来实时监测钢轨的形状和位置,如位移传感器、压力传感器等。
这些传感器能够将监测到的数据传输给控制系统,以便对钢轨进行自动调整。
通过传感器提供的数据,控制系统能够精确分析钢轨的状态,并作出相应的调整动作。
其次,自动化钢轨调直机系统中的控制器是系统的核心部件,它根据传感器提供的数据制定出调整策略,并通过执行器来控制调整过程。
控制器通常采用基于PLC(Programmable Logic Controller)的控制系统,它具有强大的计算和控制能力,可以高效地处理大量的数据,并能够实现复杂的控制算法。
控制器能够根据预设的标准来判断钢轨的偏差程度,并根据需求进行调整。
在控制器中还可以设置一些保护措施,如过载保护和紧急停机,以确保系统的安全运行。
此外,自动化钢轨调直机系统中还可以加入视觉识别系统,用于实时检测钢轨的表面缺陷和裂纹情况。
视觉识别系统通过摄像头或激光扫描仪获取钢轨表面的图像数据,并通过图像处理算法进行分析。
通过视觉识别系统,可以及时发现并识别出钢轨的缺陷,从而及早采取措施进行修复,保证铁路线路的安全运营。
在控制系统的设计与应用中,关键的一点是如何将自动化钢轨调直机系统与其他设备和系统进行无缝集成。
例如,可以将自动化钢轨调直机系统与轨道车辆的行驶控制系统相连接,实现实时的调整和自动化控制。
轨道交通系统的创新与应用

不同国家和地区采用的轨道交通技术标准和规范存在差异,难以实 现国际化和互联互通。
客流量预测不准确
由于城市规划、人口流动等因素的变化,轨道交通客流量预测存在 较大误差,给运营带来挑战。
未来发展趋势预测
智能化和自动化
借助人工智能、大数据等技术,实现轨道交通系统的智能 化和自动化,提高运营效率和安全性。
日本新干线
作为高速铁路的代表,日本新干线通过不断的技术创新,实 现了高速、安全和舒适的列车运行。其采用先进的动力分散 式技术和主动悬挂系统,确保列车在高速行驶时的稳定性和 乘客舒适度。
国内典型城市轨道交通创新实践
北京地铁
作为国内最早建设的地铁系统之一,北京地铁在技术创新方面取得了显著成果 。例如,引入全自动驾驶技术,提高运营效率;推广移动支付和智能客服等智 慧服务,提升乘客出行体验。
1
智能化发展
随着人工智能、大数据等技术的不断进 步和应用,轨道交通系统的智能化水平 将不断提高。未来,轨道交通系统将实 现更加精准的客流预测、智能化的列车 调度和运营组织、个性化的乘客信息服 务等。
2
绿色化发展
环保和可持续发展是未来轨道交通发展 的重要方向。未来,轨道交通系统将更 加注重节能减排和环境保护,推广使用 清洁能源和低碳技术,减少对环境的影 响。
3
加强知识产权保护
完善知识产权制度,加大对侵犯知识产权行为的 打击力度,保障企业创新成果合法权益。
社会参与与共建共享
推动公众参与
加强轨道交通知识普及和宣传教育,提高公众对轨道交通创新发 展的认知度和参与度。
拓展国际合作空间
积极参与国际轨道交通技术交流与合作,引进先进技术和管理经验 ,提升我国轨道交通创新发展水平。
单轨道运输车机械系统设计

单轨道运输车机械系统设计作者:李鹏阳来源:《E动时尚·科学工程技术》2019年第10期摘要:对于单轨列车,如何在不旋转的轨道上保持车厢平台的平动,以及如何保证车轮与轨道之间的横向夹持等一系列技术问题,长期以来阻碍了其推广应用。
这是一个需要马上解决的问题。
在此基础上,提出了一种新的单轨运输车辆机械系统,弥补了单轨运输车辆机械系统的技术空白。
关键词:单轨道;横向夹持;自平衡控制;液压系统提出了一种单轨运输车辆机械系统的设计方案。
针对运输车辆在单轨不旋转的情况下如何保持运输车辆在单轨上运行以及轮轨之间如何保持横向夹持等技术问题,设计了采用PID控制算法对铲斗进行自平衡控制的液压伺服控制系统和采用伺服反馈方式进行夹紧控制的液压控制系统。
结合实际工况,验证了机械系统设计的正确性和可行性。
1 单轨车简介单轨运输车由装备动力机的牵引车牵引运输车辆,骑跨在一条轻便轨道上行驶带有齿条的轨道用固定支架铺设在坡地上,并可向任意方向延伸。
运输车离地间隙约30cm,牵引车上的驱动齿轮与轨道的齿条啮合,用一台2~3kW的汽油机驱动,行驶速度0.6~0.7m/s,运载质量500kg,爬坡能力45°。
上、下坡时由调速制动器控制车速,当下坡速度达到常速的1.3倍时紧急制动器自动起作用。
轨道终端设有防止脱轨装置,架设单轨车轨道时用一英寸的圆管打入土中,其下有一直径约10cm的止沉盘,旁边用支柱斜支于地上,故轨道的架设不会破坏植被和妨碍作物的种植及生长。
单轨车不受地形限制,只要能架设轨道,就能到达任何地方。
单轨车轨道为50mm×50mm的方形轨道,台车的车轮以上下嵌合轨道方式运动,运动平稳,由于有三种刹车形式,故安全性能非常好,其主要特点如下。
①可无人操作,减少人工费。
始点和终点都有自动控制装置,可自动停车。
②不破坏自然环境。
不用开路、不用伐树,不破坏原来的自然生态环境。
③能随时改变线路方向和开辟新的线路。
新型单轨自移设备列车移动方式的设计及应用
新型单轨自移设备列车移动方式的设计及应用新型单轨自移设备列车移动方式的设计及应用宁振兵1,2(1.太原理工大学,山西太原030024;2.太原矿机电气股份有限公司,山西太原 030032)摘要:设计了一种采用新型结构形式来移动的悬挂式矿用设备列车自移系统,重点介绍了设备的结构、工作原理和新的驱动前进方式。
关键词:I140E轨道;设备列车;并联驱动;移动方式;设计0 引言煤矿企业将综采工作面控制设备(如液压泵站、负荷中心、开关组等)集中布置于工作面顺槽中,距离采煤工作面切眼40 m~200 m处,这些设备统称为设备列车[1-2]。
随着采煤机和转载机的向前推移,设备列车跟随向前移动,需克服巷道内的地板起伏不定、巷道上下坡度等困难。
随着煤矿现代化水平的不断提高,采用I140E规格轨道的单轨吊辅助运输系统开始在煤矿得到广泛的使用,而应用于设备列车并辅助其移动的设备称为单轨自移设备列车。
单轨自移设备列车带制动装置,集成设备移动、电缆移动[3-4]、电缆回收等功能,可提高煤矿安全因素、减轻工人劳动强度、提高采煤工作效率。
但其设备移动过程中,出现运行不平稳、上坡时设备淤积以及单轨轨道扭曲损坏等现象。
本文介绍一种新型单轨自移设备列车移动方式的设计及应用。
1 设计方案1.1 现有设备移动原理及问题单轨自移设备列车所承载的设备具有如下特点:①数量多,包括负荷中心、开关组、乳化液泵、喷雾泵等最多二十多个设备部件[5];②重量大,整套设备列车重量能达到100 t,单件最重达22 t[6];③长度长,整套列车平均长度为100多米[7],其中单件设备最短3 m、最长7 m。
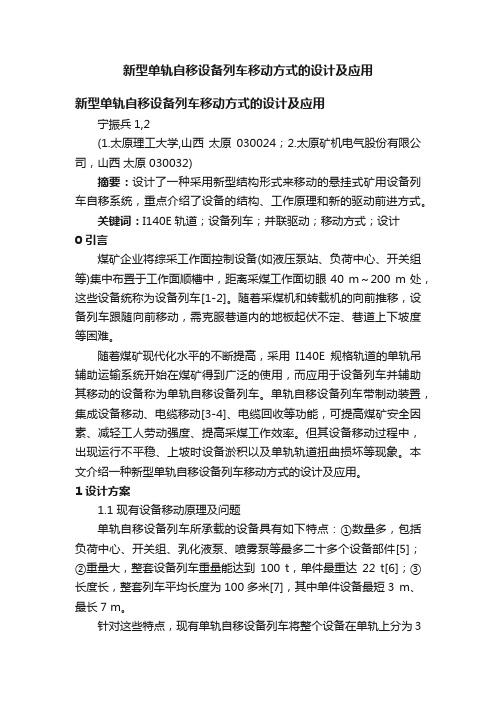
针对这些特点,现有单轨自移设备列车将整个设备在单轨上分为3段,采用两个推进油缸分段推移前进。
各推进油缸采用串联连接以实现移动同步,移动原理如图1所示。
设液压系统压力为p、油缸缸筒直径为D、油杆直径为d,则整个设备驱动力为:.现有设备存在如下问题:①各推进油缸采用串联连接,实际总牵引力为单缸牵引力,牵引力偏弱;②运行过程中若串联油管漏液,各推进油缸存在不同步现象;③若某一段内设备过重或过长,上坡时存在淤积现象,造成单轨轨道扭曲损坏。
单轨交通系统的设计与实现

单轨交通系统的设计与实现随着城市化进程的加速和城市交通压力的不断加大,城市交通系统的建设成为了现代城市发展的重要部分。
而单轨交通作为一种新型的城市交通系统,其在城市交通建设中也开始得到广泛地关注和应用。
本文就单轨交通系统的设计与实现进行探讨。
一、单轨交通系统概述单轨交通系统是通过单轨道来支撑列车运行的城市交通系统。
与传统的地铁系统相比,单轨交通系统具有运营成本低、运输效率高、调试周期短等诸多优势。
由于其独特的设计理念和运行模式,单轨交通系统在城市轨道交通系统中具有得天独厚的优势,成为一种备受关注的城市交通系统。
二、单轨交通系统的设计原则单轨交通系统的设计需要遵循一定的原则,以确保其安全、可靠、高效的运行。
下面就单轨交通系统的设计原则分别进行阐述:1、安全第一安全是单轨交通系统设计的首要原则。
在设计过程中需要充分考虑列车的制动距离、刹车性能、制动系统等关键因素,确保列车能够快速、平稳地刹车,避免事故发生。
此外,单轨交通系统的高度、支撑结构、车厢设计等也需要考虑到安全因素,确保列车行驶期间不会发生任何安全事故。
2、可靠性高要想确保单轨交通系统的正常运行,就需要其中所包含的各个组成部分都能够在长期使用中保持高度的可靠性。
在设计过程中,需要选择高质量的供应商,选用高性能、高可靠性的电气设备和机械设备,确保单轨交通系统的各个部分都能高效稳定地运行。
3、运维成本低单轨交通系统设计时,需要注重运维成本的问题。
设计中需要注重选用易于维护的设备和机械件,确保设备更换或维护时能够最少限度地影响列车运行。
另外,在设计过程中需要考虑最优的电能利用问题,选用高效稳定的交流设备以降低运行成本。
4、环保可持续在单轨交通系统设计过程中,需要注重环保可持续的问题。
在选用设备和机械件的时候,可以注重选择绿色环保型的设备和材料,以实现单轨交通系统设计的环保可持续性。
三、单轨交通系统的运营模式单轨交通系统的运营模式是指列车在单轨道上运行的模式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单轨自移设备列车系统的设计及应用Design and application of self moving equipment monorail train system关键词:设备列车、I140E单轨轨道、设备自移、电缆伸缩自移、高度集成Keywords: equipment train, I140E single track, equipment, since the shift cable stretching self moving, highly integrated摘要:采用自带的液压系统设计的一种新型的悬挂式矿用设备列车自移系统。
重点介绍设备的组成、结构、工作原理和特点。
解决井下综采工作面巷道起伏变化多,综采工作面设备列车移动带来的不安全因素,以及解决传统设备列车布线凌乱及电缆自移的问题。
实验表明,该自移系统的使用保证了安全,极大的减轻的工人的劳动强度,运行可靠,布置整洁美观,具有广泛的应用前景。
The shift from the design of the hydraulic system of hydraulic system comes with a new type of suspension type mining equipment train. Introduces the equipment composition, structure, working principle and characteristics. To solve the underground roadway of fully mechanized working face ups and downs, unsafe factors in fully mechanized face equipment train mobile brings, and to solve the traditional equipment and cable wiring messy train moved since the problem. Experiments show that, the shift from the use of the system to ensure the safety, labor intensity, greatly reducing the worker's reliable operation, clean and beautiful arrangement, has the widespread application prospect.1 引言煤矿企业已走向综合机械化采煤工艺,并且机电设备实现了大型化、高速连续化和自动化。
为了便于设备的管理,煤矿企业将所有设备(比如:液压、液泵、负荷中心、开关组等)集中布置于工作面顺槽中,距离采煤工作面切眼40到200米处,这此设备统称为设备列车。
随着采煤机和转载机的向前推移,设备列车需克服巷道内的地板起伏不定、巷道上下坡度、移动过程中电缆布置以及电缆回收等困难。
跟随向前移动。
随着煤矿现代化水平的不断提高,煤矿企业由最开始的圆柱绞车牵引设备列车,发展到部分煤矿使用液压地轨卡轨车自移的方式。
然而,这些方式没能从根本上解决巷道内的地板起伏不定、巷道上下坡度等带来的工作劳动强度大、地轨成本高的问题,且存在移动效率低、安全事故多以及电缆布置以及电缆回收困难等问题。
针对地轨设备列车存在的一系列问题,设计一种行驶于柔性挂接于巷道顶部的I140E单轨轨道上的悬挂式自移设备列车系统,以液压为动力,自带制动装置,高度集成设备自移、电缆自移、电缆回收等功能,对提高煤矿安全因素、减轻工人劳动强度、提高采煤工作效率等方面都有深远的意义。
2 设计方案及原理2.1设计方案矿用设备列车具有如下特点:1、设备多,包括负荷中心、开关组、乳化液泵、乳化液箱、喷雾泵、清水箱、电缆回收车等最多二十个设备部件;2、重量大,负荷中心从8吨到20多吨不等,其它设备平均都是3吨以上,一整套设备列车最重能达到100吨;3、长度长,由于单个设备最短也有3米长,负荷中心最长能达到7米,设备之间还有一定的安全距离,再包括设备列车与工作面之间的电缆距离,整套列车平均长度都在100米以上。
针对这些特点,单轨自移设备列车运行轨道采用DIN2093标准I140E规格单轨轨道,轨道沿运行巷道从转载机处至巷道口铺设,彻底摆脱煤矿巷道地板的复杂情况对设备列车运行的影响,而且单轨轨道具有卡轨功能,运行过程中不存在掉道现象。
单轨自移设备列车自带动力源,采用自带乳化液泵站或液压泵站提供动力。
单轨自移设备列车采用两大部分构成——设备自移部分和电缆伸缩自移部分,两大部分采用拉杆相连但是分开运动。
电缆伸缩自移部分跟随采煤机、转载机等同步移动,每次移动距离较短。
设备自移部分根据采煤机前进速度以及煤矿企业需要设计一定的移动周期,每次移动距离较长。
由于煤矿安全规程的要求——矿用设备禁止带电移动,所以设备列车两部分移动动力采用交叉供液,即:设备自移部分的动力泵站集成于电缆伸缩自移部分,电缆伸缩自移部分动力采用设备自移部分集成的泵站,也可直接采用矿方乳化液泵提供动力。
排布方案如图1所示。
图1单轨自移设备列车的排布方案2.2设备自移方案及原理设备列车中设备自移部分主要用于集成整套设备列车并且悬挂于I140E单轨轨道上,以及为整套设备列车提供移动动力。
其移动原理采用煤矿现有相对比较成熟的迈步式移动方式,即一个推进油缸,前后各一个制动装置的方式,采用一组控制阀控制前后制动装置的工作和打开,以及推进油缸的伸缩来实现整个设备的向前移动。
传统的方案是将整部列车分为前后两段来运行,这时由于整套设备列车重量大,长度长,在上下坡时容易造成单缸推力过大或上下设备堆积等现象,对运行轨道造成一定的破坏。
本设计方案为将整部设备自移列车在单轨上分为三段或者四段,采用两个或三个推进油缸分段推移前进。
各推进油缸采用串联连接以实现移动同步,移动原理如图2、图3所示:图2:设备列车分三段推进原理图3:设备列车分四段推进原理2.3电缆伸缩自移方案及原理电缆伸缩自移部分主要用于设备自移部分与工作面综采设备的连接过渡,集成、排布设备列车与工作面切眼之间的电缆、油管等,并且实现电缆与工作面综采设备的同步前进和曲张伸缩的功能。
设计方案为采用单组迈步式移动装置做为电缆与工作面综采设备同步移动的动力,采用多组电缆小车(使用链条进行连接)间隔一定距离来实现电缆部分的伸缩功能。
工作时,迈步式移动装置与综采设备同步前进,推移电缆小车的过程中电缆实现收缩;经过一定行程的收缩,设备自移部分开始移动,对电缆小车拉拽实现电缆的伸展。
如图4所示:图4电缆伸缩自移方案3 受力分析3.1单轨轨道悬挂受力分析目前,煤矿企业应用设备列车中的设备最重、最大件为矿用负荷中心(或者移动变电站),最重能达到20多吨重,将20吨重的设备悬挂于采用锚杆悬挂的I140E单轨轨道上,需要一些特殊的悬挂装置。
如下图5所示:图5:悬挂装置简图悬挂20吨重型设备采用杠杆分力的结构形式,将20吨重量通过分散力臂装置分成4个连接点将重力传递到悬挂装置上,悬挂装置通过6个承载小车再次将重量分散到I140E单轨轨道上,最后轨道通过轨道吊点将力传递到巷道基板上。
轨道长3米,承载小车间距1.8米,分散力臂长3390,其吊点在1/3处。
经过计算,单轨轨道单个吊点最大受力为59.99KN,实际悬挂轨道时采用双锚杆悬挂,单根锚杆锚固力保证150KN,双根为300KN。
安全系数约为5倍,满足煤矿悬挂要求。
3.2设备列车自移爬坡角度的分析确定目前煤矿企业使用的设备列车整套最重约为100吨,设备列车移动时采用多节同步迈步式移动。
这种移动方式的特点是不论分成几节,整体都是靠两个三位四通液压阀控制,一个液压阀控制制动装置的打开,一个液压阀控制推进油缸的伸缩。
设备列车移动时,总是一部分制动静止,一部分被推进油缸推进移动,如设备列车分四段推进原理如示,设备列车一段和三段同步移动,二段和四段同步移动。
根据这种情况,推进油缸的布置可以将设备列车分成重量大约相等的两部分,如设备列车分四段推进原理图,可将设备列车一段、三段的重量之和与设备列车二段、四段的重量之和相等,这样可以尽量使推进油缸的受力均衡。
设计推进油缸为φ160/90-1500,工作压力为12MPa,可得:油缸推力:F1=π*802*12N=241152N≈241.2KN油缸拉力F2=π*(802-452)*12N=164850N≈164.9KN由于各推进油缸油路采用串联方式连接,用以达到同步运行,所以整套设备列车的推移动力为单个油缸的推力和拉力。
所以可得整套设备列车的驱动力为164.9KN。
在公式:F=mgsinα+mgcosα×0.03中,F为驱动力164.9KN,m为设备重量50t,g为重力速度约10,α为爬坡角度,0.03为设备列车在轨道行驶时的摩擦系数。
考虑在实际工作过程中液压系统和机械系统的效率损失,为驱动力提供30%的富余量,即:F×70%=mgsinα+mgcosα×0.03164.9×0.7=50×10×sinα+50×10×cosα×0.03可得:设备列车的爬坡角度α≈11.5°4 总结根据以上设计、计算、分析可得,单轨自移设备列车可承载现有煤矿企业使用列车全部设备,根据设备重量的不同可选择不同的悬挂承载装置;单轨自移设备列车可适应复杂的煤矿巷道环境,特别的针对上下带坡起伏巷道;单轨自移设备列车摆脱地轨形式,采用顶悬挂I140E单轨轨道形式运行,投资成本低,安装简单,地面环境影响小,不脱轨,运行安全。
5 实际应用目前,在山西潞安常村矿、漳村矿、王庄矿,霍州煤电山浪矿、李雅庄矿,以及潞宁矿业和汾西矿业的各大煤矿企业都已运行该系统,实际使用效果良好。
实践证明,这一应用可显著提高煤矿的生产效率,大大降低了工人劳动强度,彻底消除“绞车对拉”产生的安全隐患,保证了煤矿的安全生产,值得推广和应用。