1基本概念
1的数学概念

1的数学概念数学是一门抽象而又实用的学科,它贯穿于我们日常生活中的各个方面。
而在数学中,1这个数字是非常特殊的存在,它不仅是最小的自然数,也是所有数的基础。
本文将从不同的角度探讨1在数学中的概念和作用。
一、1的基本概念1是自然数中最小的数字,它是所有数的基础。
在数学中,1有着特殊的地位,它可以作为加法、减法、乘法和除法中的单位元素。
例如,1+2=3,1是加法中的单位元素;3-1=2,1是减法中的单位元素;1×4=4,1是乘法中的单位元素;4÷1=4,1是除法中的单位元素。
除此之外,1还是一些数学公式的基础,如指数公式、对数公式、三角函数等等。
二、1的几何意义在几何中,1表示单位长度,它可以用来度量线段、角度、面积和体积等。
例如,在直角三角形中,1可以表示斜边上的单位长度,同时也可以表示角度为45度的直角。
在平面几何中,1可以表示单位面积,例如平方米、平方厘米等。
在立体几何中,1可以表示单位体积,例如立方米、立方厘米等。
因此,1在几何中有着重要的作用,它是度量和计算的基础。
三、1的逻辑意义在逻辑学中,1表示真值,它是命题中的基本元素。
命题是可以判断真假的陈述句,例如“今天是星期六”就是一个命题,它的真假只有两种情况,即真和假。
而1表示命题为真,0表示命题为假。
例如,命题“1+1=2”可以表示为真命题,命题“1+1=3”可以表示为假命题。
因此,1在逻辑中有着基本的作用,它是真值的基础。
四、1的代数意义在代数中,1是数学中的一个基本符号,它可以表示各种数学结构中的单位元素。
例如,在实数中,1表示实数乘法的单位元素,即任何实数与1相乘都等于它本身。
在矩阵中,1表示单位矩阵,它是一个对角线上全是1,其余元素均为0的矩阵。
在向量空间中,1表示单位向量,它是一个长度为1的向量。
因此,1在代数中也有着基本的作用,它是各种数学结构中的基础。
五、1的计算意义在计算中,1是非常重要的数字,它可以用来表示比例、概率和百分比等。
1 静力学基本概念和受力分析

F
C
FC'
A
B
FAx A FAy
三铰拱
§1-4 物体的受力分析和受力图
[例1] 分别画球和AB 杆的受力图。 画物体受力图主要步骤为: (1)选研究对象; (2)取分离体; (3)画上主动力; (4)画出约束力。 FB FB
或
FD FE
FD FAy FAx
FD FA 应用三力汇交定理
§1-4 物体的受力分析和受力图
P
B
RA
P
XA
A C
RB
45
NB
mg
B
YA
RB
45
§1-4 物体的受力分析和受力图
画AC和CB的受力图
P
C
P
C
B
A
FC FC
A
C
B
FCB C P
P
C
FB
B
B
C
F´CB
FBC
A
F
FAC A
§1-4 物体的受力分析和受力图
练习2、画出下列各构件的受力图和整体的受力图 FD F FBy FBx FH FC F FAx FAy FD
本篇重点: 1.物体的受力分析 2.力系的简化
3.力系的平衡条件
§1-1
静力学基本概念
静力学:研究物体在力系作用下的平衡规律的科学。
1、刚体:就是在力的作用下,大小和形状都不变的物体。
即物体内部任意两点间距离始终保持不变。
静力学的研究对象,是理想化的力学模型。 2、平衡:是指物体相对于惯性参考系(如地面)保持静止或
★ 根据各类约束类型逐一画出约束力。
F
C
1 控制系统的基本概念
闭环控制系统的组成
1.1.1 控制系统工作原理
控制系统案例
控制系统工作原理
1.1.1.1 控制系统案例 —人工控制恒温系统
温度计
加热电阻丝
调压器
~220V 人工控制的恒温箱
1.1.1.1 控制系统案例 —人工控制恒温系统
人工控制恒温箱调节过程
观测恒温箱内的温度(被控制量) 与要求的温度(给定值)进行比较,得到温度偏差的 大小和方向
u1 + u
电压 放大器
减速器 功率 放大器 执行 电动机
调压器
u2
热电偶 加热电阻丝
+
~220V 自动控制恒温系统
1.1.1.1 控制系统案例 —自动控制恒温系统
自动控制恒温系统工作过程
恒温箱实际温度由热电偶转换为对应的电压u2。 恒温箱期望温度由电压u1给定,并与实际温度u2比较 得到温度偏差信号u=u1 u2。
现在控制量与被控量的偏差上,因此,可以将控制系
统的扰动等效为对控制对象的干扰。
1.2 控制系统的基本类型
按输入量的特征分
恒值调节系统:给定量是恒定的控制系统。分析的重 点在于克服扰动对输出量的影响。
程序控制系统:当输入量为已知给定的时间函数时, 称为程序控制系统。
随动系统:系统的给定量是时间的未知函数,即给定
1.3 控制系统的基本要求
控制系统的基本要求
在系统稳定的前提下,系统要稳、准、快。
注意:
不同性质的控制系统,对稳定性、精确性和快速性要 求各有侧重。
系统的稳定性、精确性、快速性相互制约,应根据实 际需求合理选择。
1.4 控制工程发展概况
计算机一级PPT05计算机组成

7 内存大小的计算
【例1】:某存储器的地址范围为1000H~4FFFH,其寻址范 围是( 16 )KB?
实际存储空间
1B 1B 1B 1B … 1B 1B
地址
4FFFH 4FFEH 4FFDH 4FFCH …. 1001H 1000H
解: 存储空间数量:
(1)运算器(ALU) 运算器主要由算术逻辑单元和各种寄存器组成。主 要功能是执行数值运算的加、减、乘、除等算术运算和 执行与、或、非的逻辑运算。
1.1 五大基本硬件-CPU
(2)控制器 控制器是计算机的指挥中枢,用于控制计算机各个部 件按照指令的功能要求协同工作,负责全机控制。其基 本功能是从内存取指令、分析指令、执行指令和向其他 部件发出控制信号。 控制器的主要部件由程序计数器(PC) 、指令寄存器 (IR) 、指令译码器(ID) 、操作控制器(OC)组成。
工具:编译程序
解释程序
2 系统软件-程序设计语言
解释方式:口译 特点:边翻译边执行 不产生目标程序
6 硬盘大小的计算
磁盘空间大小的计算 磁盘的数据存储是按照扇区进行存储的,同时,存储
容量是硬盘的主要参数。目前机械硬盘存储容量已经超过 6TB,一般的计算机也会达到几百GB到几TB,存储容量的 公式为:
存储容量=盘面数 × 磁道数 × 扇区数 × 每个扇区容量 例如:一个机械硬盘有64个扇面,1600个磁道,1024个扇
4FFFH-1000H+1 = 4000H 转换成十进制: 4000H = 4*163 空间大小: 4*163/210 = 16KB
02软件系统
1 基本概念
► 软件
程序、程序运行所需要的数据及开发、使用和维护这些程序所需要的文档。
1 控制系统的基本概念解析

xo (t ) 是否收敛。 右边 为零时(即齐次方程),
d n xo (t ) d ( n1) xo (t ) dxo (t ) an a a a0 xo (t ) 0 n 1 1 n n 1 dt dt dt
HG/T 20505-2000 《过程测量与控制仪表的功 能标志及图形符号》适用于化工自控专业的初步 设计/基础设计、工程设计/施工图设计中仪表位号 编制,监控系统原理图等设计工作。
(一)仪表位号
工艺管道及仪表流程图中每个系统、每台仪表都
有一个唯一的标识,这个标识叫作位号。
仪表位号由仪表功能标志与仪表回路编号两部
操作人员的繁重或重复性体力劳动的装置。
2018/10/5 19
4、自动控制系统
作用:利用一些自动控制仪表及装置,对生
产过程中某些重要的工艺变量进行自动调节,
使它们在受到外界干扰影响偏离正常状态后,
能够自动地重新回复到规定的范围之内,从
而保证生产的正常进行。
2018/10/5 20
二、过程装备控制的任务和要求
i 1
i t
e it ( Ai cosi t Bi sin i t )
i 1
x o (t ) 0 , 只有当实数根λ i,复数根的实部 σi 为负值时,有 lim t
系统稳定。否则系统是不稳定的。
控制系统稳定的充要条件
线性系统稳定的充要条件是:闭环系统特征方程的所有根均 具有负实部;或者说,闭环传递函数的极点均位于s平面的左
PID
2018/10/5 42
§1-4 控制系统的分类
按给定值的 不同特点
定值控制系统 随动控制系统 程序控制系统 闭环控制系统 开环控制系统
1 基本概念及一次同余式
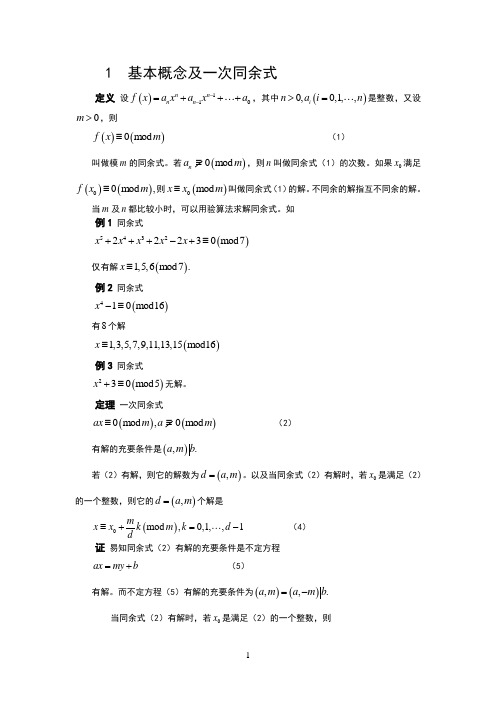
1 基本概念及一次同余式定义 设()110n n n n f x a x a x a --=+++,其中()0,0,1,,i n a i n >=是整数,又设0m >,则()()0mod f x m ≡ (1)叫做模m 的同余式。
若()0mod n a m ≡,则n 叫做同余式(1)的次数。
如果0x 满足()()00mod ,f x m ≡则()0mod x x m ≡叫做同余式(1)的解。
不同余的解指互不同余的解。
当m 及n 都比较小时,可以用验算法求解同余式。
如例1 同余式()543222230mod7x x x x x +++-+≡仅有解()1,5,6mod7.x ≡例2 同余式()410mod16x -≡有8个解()1,3,5,7,9,11,13,15mod16x ≡例3 同余式()230mod5x +≡无解。
定理 一次同余式()()0mod ,0mod ax m a m ≡≡ (2)有解的充要条件是(),.a m b若(2)有解,则它的解数为(),d a m =。
以及当同余式(2)有解时,若0x 是满足(2)的一个整数,则它的(),d a m =个解是()0mod ,0,1,,1m x x k m k d d ≡+=- (4)证 易知同余式(2)有解的充要条件是不定方程ax my b =+ (5)有解。
而不定方程(5)有解的充要条件为()(),,.a m a m b =-当同余式(2)有解时,若0x 是满足(2)的一个整数,则()0mod ,0,1,, 1.m a x k b m k d d ⎛⎫+≡=- ⎪⎝⎭ 下证0,0,1,,1m x k k d d+=-对模m 两两部同余。
设 ()00mod ,01,1m m x k x k m k d k d d d''+≡+≤≤-≤≤- 则()mod ,mod ,.m m m k k d k k d k k d d d ⎛⎫'''≡≡= ⎪⎝⎭ 再证满足(2)的任意一个整数1x 都会与某一个()001m x k k d d+≤≤-对模m 同余。
员工自主改善系列教材-1 基本概念

目录 CONTENTS
一、自主改善定义、特点 二、提案写作方法 三、改善的着眼点
1 自主改善定义、特点
自主改善关于工作的理解
我们工厂的现状是多数员工仅在“作业”,所以我们在推“改善”,希望改变这种状况。但即使有 了“改善”,也不一定是“工作”的状态;只有当“作业”与“改善”两种血液融为一体了,才是真 正的“工作”。
品质
− 不 良 :品质是否有问题 − 不稳定 :品质是否稳定 − 不 定 :是否有品质基准
成本
− 不必要:是否在做无用功,是否存在浪费。
22
对带“不”字工作的改善
着眼点:从“不”字找起
效率
− 不够快:是否存在无效的作业 − 不 足:是否现有能力不足
设备
− 不防备:是否采取了防范故障和危险的措施 − 不合适:设备是否有不合适的地方 − 不充分:设备是否利用率不高
的工时、费用等,要表述提案者尽心尽力的程度。
15
如何填写书面提案表
(3)提案主要内容书写
− 实施效果:以数字的形式,按由大到小的顺序表述效果,切记要将效果换算成年度效果;要明确提 案适用的范围。
(4)直接上级辅导
− 上级要做好辅导工作,但不要总是要求下属写出完美的提案,不要轻易令其重写,否则可能增加不 足之处或打击员工积极性。
计划与实际的步骤是否存在 不相符之处 是否实现了作业顺序的标准 化 文件格式是否实现标准化
20
消除七大浪费 着眼点:七大浪费
21Βιβλιοθήκη 对带“不”字工作的改善着眼点:从“不”字找起
安全
− 不安全:是否有发生安全事故的危险 − 不注意:是否不注意的话就有受伤的危险 − 不卫生:是否存在不卫生的地方可导致安全隐患
结构力学(第一章)

例4: 对图示体系作几何组成分析
解: 该体系为瞬变体系. 该体系为瞬变体系. 方法3: 方法3: 将只有两个铰与其它部分相连的 刚片看成链杆. 刚片看成链杆.
方法1: 若基础与其它部分三杆相连, 方法1: 若基础与其它部分三杆相连,去掉基础只分析其它部分 方法2: 利用规则将小刚片变成大刚片. 方法2: 利用规则将小刚片变成大刚片. 方法3: 将只有两个铰与其它部分相连的刚片看成链杆. 方法3: 将只有两个铰与其它部分相连的刚片看成链杆.
几何组成作业题
1-1 b c 1-2 a d g h i j k l 交作业时间: 交作业时间:本周 5
§1. 几何组成分 析
作业: 作业: 1-1 (b)试计算图示体系的计算自由度 试计算图示体系的计算自由度
解:
或:
W = 8×311×2 3 = 1 W =1×3+ 5×2 2×2 10= 1
例6: 对图示体系作几何组成分析
解: 该体系为无多余约束几何不变体系. 该体系为无多余约束几何不变体系. 方法5: 从基础部分(几何不变部分)依次添加. 方法5: 从基础部分(几何不变部分)依次添加.
方法1: 若基础与其它部分三杆相连, 方法1: 若基础与其它部分三杆相连,去掉基础只分析其它部分 方法2: 利用规则将小刚片变成大刚片. 方法2: 利用规则将小刚片变成大刚片. 方法3: 将只有两个铰与其它部分相连的刚片看成链杆. 方法3: 将只有两个铰与其它部分相连的刚片看成链杆. 方法4: 去掉二元体. 方法5: 从基础部分(几何不变部分)依次添加. 方法4: 去掉二元体. 方法5: 从基础部分(几何不变部分)依次添加.
§1. 几何组成分析
§1-2 无多余约束的几何不变体系的组成规则
一. 三刚片规则 二. 两刚片规则 三. 二元体规则 二元体: 二元体:在一个体系上用两个不共线的链杆连 接一个新结点的装置. 接一个新结点的装置. 在一个体系上加减二元体不影响原体系的机动性质. 在一个体系上加减二元体不影响原体系的机动性质.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 基本概念:
单位上三角阵即为主对角线元素为1的上三角矩阵。
对称矩阵正定的充分必要条件是矩阵的各阶主子式都为正。
2 矩阵分解
将数域P 上的某个已知矩阵写成若干个满足一定条件的特殊类型矩阵之和或矩阵之积的形式,将这种矩阵表示成为矩阵的分解。
矩阵分解可以使矩阵的结构简洁明了,从而减少矩阵的各种相关运算量。
3 矩阵的三角分解
若A 为n 阶方阵,如存在单位下三角矩阵L 和上三角矩阵U 使得
A LU = (1)
则称A 可以进行三角分解。
矩阵三角分解的存在唯一性可表述如下:
设A 为n 阶非奇异矩阵,则A 可唯一的分解为一个单位下三角矩阵L 和一个上三角矩阵U 的乘积充分必要条件是A 的所有顺序主子式均不为零。
4 Cholesky 分解
设A 为对称正定矩阵,则存在唯一的三角分解:
T A LL = (2)
其中L 为下三角阵,且对角元大于零。
4.1 Cholesky 分解的计算公式
利用Cholesky 分解容易求得下三角阵L 的元素,用L ij 表示L 的元素,且i<j 时,有
L ij =0 。
由矩阵的乘法可得:
1
,j
ij ip jp p a l l i j ==≥∑ (3)
由上式自左至右逐列计算待定元素ij l ,可得计算公式: 对于j=1,2,…,n ,有
11
221
()j jj jj jp
p l a l -==-∑ (4)
1
1
,1,,,j ij ip jp
p ij jj
a l l l i j n j n l -=-=
=+⋅⋅⋅≠∑ (5)
4.2 cholesky 分解实例
P 为一3阶对称正定阵,对其进行cholesky 分解,得到T
P CC =
2
1121
311111111121113122
2122322122
2122112121212131223222231
32
333132333132
331131
21313132330
00
000T
T
p p p c c c c c c c p p p c c c c c c c c c c c c p p p c c c c c c c c c c c c c ⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥==++⎢⎥⎢⎥⎢⎥⎢⎥
⎢⎥⎢⎥⎢⎥⎢⎥++⎣⎦⎣⎦⎣⎦⎣⎦ 根据各个元素对应相等的关系,可以利用公式(4)、(5)求得矩阵C 的各个元素。
Cholesky 分解用于求解方程组或是求逆,降低了存储空间,只需存储矩阵的n(n+1)/2个元素,而且计算量小,但是要进行开方运算。
5 LD 分解(modified cholesky decomposition )算法
对称正定矩阵P 可被分解为P=LDL^,其中L 为单位下三角矩阵,D 为对角矩阵,称之为LD 分解或修正Cholesky 分解。
记
111
1111121222
11
1111123111111,,n n n nn l d a a a l l d a a a A L D l l l d a a a ⋅⋅⋅⎡⎤⎡⎤
⎡⎤⎢⎥⎢⎥⎢⎥⋅⋅⋅⎢⎥⎢⎥⎢⎥===⎢⎥⎢⎥⎢⎥⋅⋅⋅⎢⎥⎢⎥⎢⎥
⋅⋅⋅⋅⋅⋅⎣⎦⎣⎦⎣
⎦
ii l =1(i=1,2,…,n )。
由矩阵的乘法可得: 1
,j
ij ik jk k k a l l d i j ==≥∑ (6)
当j=i 时,由上式可得矩阵D 的元素:
1
2
1,1,2,
,i i ii ik k k d a l d i n -==-=∑ (7)
当j<i 时,有
1
1
j ij ik jk k ij jj j k a l l d l l d -==+∑ (8)
可得矩阵L 的元素:
1
1
()/j ij ij ik jk k j k l a l l d d -==-∑ (9)
矩阵的LD 分解可以解决矩阵运算过程中的舍入误差带来的病态性问题,能够提高数值
解的稳定性和可靠性并且存储空间小,计算效率高。