现代控制理论大作业倒立摆
倒立摆模型

摆杆/小车铰接点与摆杆质心的距离
l 0.25m
摆杆绕其质心的转动惯量
I 0.0034kg m2
备注:可忽略了空气阻力以及小车与摆杆之间铰接点上的摩擦力矩。
表 1. 实验装置参数
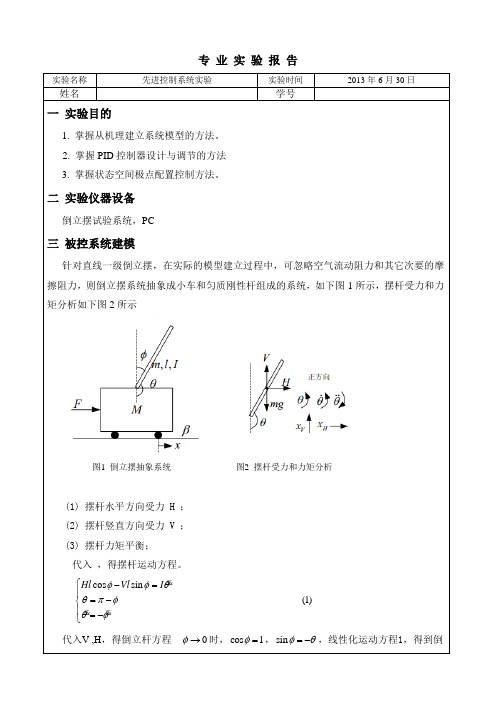
现基于现代控制理论,按照如下步骤实现对研究直线一级倒立摆的控制方 法:1)建立直线一级倒立摆的运动方程;2)推导状态空间方程;3)分析能控
F
M
g
a. 小车的受力分析
b. 摆杆的受力分析
图2. 小车与摆杆的受力分析
小车在水平方向运动,则通过对小车的水平受力分析,可以得到以下方程:
(1) 摆杆作平面运动,可以分解为质心的平动和绕质心转动,由水平方向的受力 分析,可以得到下式:
即,
(2)
带入方程(1)得:
(3) 再由摆杆的垂直方向的受力分析,得到下式:
即, 又由摆杆对质心的力矩平衡方程有:
2
(4) (5)
直线一级倒立摆控制方法
由于
,所以等式左边有负号。最后,整理方程 (4),(5),可得: (6)
由于 ,则有
. 用 u 代表输入,也就是作用在
小车上的作用力,整理方程(3),(6)可以得到一级倒立摆的运动方程
(7) 2. 系统的状态空间方程
为求系统的状态空间方程,对方程(7)进行拉氏变换,得到:
1
直线一级倒立摆控制方法
及能观性;4)计算状态反馈矩阵及状态观测矩阵;5)通过离线仿真分析验证上 述控制算法的有效性;6)通过上机实验观察其实际控制效果。 1. 建立直线一级倒立摆的运动方程
对小车和摆杆进行受力分析如图 2,其中,N 和 P 为小车与摆杆相互作用力 的水平和垂直两个方向的分量。
N
P
现代控制理论-大作业-倒立摆
现代控制理论-大作业-倒立摆-标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII摘要倒立摆系统是一个复杂的、高度非线性的、不稳定的高阶系统,是学习和研究现代控制理论最合适的实验装置。
倒立摆的控制是控制理论应用的一个典型范例,一个稳定的倒立摆系统对于证实状态空间理论的实用性是非常有用的。
本文主要研究的是二级倒立摆的极点配置方法,首先用Lagrange方程建立了二级倒立摆的数学模型,然后对二级倒立摆系统的稳定性进行了分析和研究,并给出了系统能控能观性的判别。
基于现代控制理论中的极点配置理论,根据超调量和调整时间来配置极点,求出反馈矩阵并利用Simulink对其进行仿真,得到二级倒立摆的变化曲线,实现了对闭环系统的稳定控制。
关键词:二级倒立摆;极点配置;Simulink目录1.绪论 (1)2 数学模型的建立和分析 (2)2.1 数学建模的方法 (2)2.2 二级倒立摆的结构和工作原理 (2)2.3 拉格朗日运动方程 (3)2.4推导建立数学模型 (4)3 二级倒立摆系统性能分析 (10)3.1 稳定性分析 (10)3.2 能控性能观性分析 (11)4 状态反馈极点配置 (12)4.1 二级倒立摆的最优极点配置1 (12)4.2 二级倒立摆最优极点配置2 (14)5. 二级倒立摆matlab仿真 (16)5.1 Simulink搭建开环系统 (16)5.2 开环系统Simulink仿真结果 (16)5.3 Simulink搭建极点配置后的闭环系统 (17)5.4极点配置Simulink仿真结果 (18)5.4.1 第一组极点配置仿真结果 (18)5.4.2 第二组极点配置仿真结果 (20)6.结论 (22)7.参考文献 (23)附录一 (24)1.绪论倒立摆最初诞生于麻省理工学院,仅有一级摆杆,另一端铰接于可以在直线导轨上自由滑动的小车上。
后来在此基础上,人们又进行拓展,设计出了直线二级倒立摆、环型倒立摆、平面倒立摆、柔性连接倒立摆、多级倒立摆等实验设备。
现代控制一级倒立摆
现代控制一级倒立摆倒立摆实验电子工程学院自动化学号:目录1实验设备简介 (4)1.1倒立摆介绍 (4)1.2直线一级倒立摆 (5)2 倒立摆建模 (6)2.1 直线一阶倒立摆数学模型的推导 (6)2.1.1受力分析 (6)2.1.2微分方程建模 (8)2.1.3状态空间数学模型 (9)2.2 实际系统模型建立 (10)3系统定性、定量分析 (11)3.1系统稳定性与可控性分析 (11)3.1.1稳定性分析 (11)3.1.2能控性分析 (13)4极点配置的设计步骤 (13)4.1极点配置的计算 (13)4.2用MATLAB进行极点配置的计算 (15)4.3极点配置的综合分析 (16)5小结 (17)1实验设备简介1.1倒立摆介绍倒立摆是处于倒置不稳定状态,人为控制使其处于动态平衡的一种摆。
如杂技演员顶杆的物理机制可简化为一级倒立摆系统,是一个复杂,多变量,存在严重非线性,非自制不稳定系统。
常见的倒立摆一般由小车和摆杆两部分组成,其中摆杆可能是一级,二级或多级,在复杂的倒立摆系统中,摆杆的长度和质量均可变化。
1.2直线一级倒立摆根据自控原理实验书上相关资料,直线一级倒立摆在建模时,一般忽略系统中的一些次要因素.例如空气阻力、伺服电机的静摩擦力、系统连接处的松弛程度等,之后可将直线一级倒立摆系统抽象成小车和匀质的杆组成的系统。
倒立摆系统是典型的机电一体化系统其机械部分遵循牛顿的力学定律其电气部分遵守电磁学的基本定理.无论哪种类型的倒立摆系统,都具有3个特性,即:不确定性、耦合性、开环不稳定性. 直线型倒立摆系统,是由沿直线导轨运动的小车以及一端固定于小车上的匀质长杆组成的系统.小车可以通过传动装置由交流伺服电机驱动. 小车导轨一般有固定的行程,因而小车的运动范围是受到限制的。
2 倒立摆建模2.1 直线一阶倒立摆数学模型的推导对于忽略各种摩擦参数和空气阻力之后,直线一即倒立摆抽象为小车和均质杆组成的系统。
倒立摆实验报告(现代控制理论)
现代控制理论实验报告——倒立摆小组成员:指导老师:2013.5实验一建立一级倒立摆的数学模型一、实验目的学习建立一级倒立摆系统的数学模型,并进行Matlab仿真。
二、实验内容写出系统传递函数和状态空间方程,用Matlab进行仿真。
三、Matlab源程序及程序运行的结果(1)Matlab源程序见附页(2)给出系统的传递函数和状态方程(a)传递函数gs为摆杆的角度:>> gsTransfer function:2.054 s-----------------------------------s^3 + 0.07391 s^2 - 29.23 s - 2.013(b)传递函数gspo为小车的位移传递函数:>> gspoTransfer function:0.7391 s^2 - 20.13---------------------------------------s^4 + 0.07391 s^3 - 29.23 s^2 - 2.013 s(c)状态矩阵A,B,C,D:>> sysa =x1 x2 x3 x4x1 0 1 0 0x2 0 -0.07391 0.7175 0x3 0 0 0 1x4 0 -0.2054 29.23 0b =u1x1 0x2 0.7391x3 0x4 2.054c =x1 x2 x3 x4y1 1 0 0 0y2 0 0 1 0d =u1y1 0y2 0Continuous-time model.(3)给出传递函数极点和系统状态矩阵A的特征值(a)传递函数gs的极点>> PP =5.4042-5.4093-0.0689(b)传递函数gspo的极点>> PoPo =5.4042-5.4093-0.0689(c)状态矩阵A的特征值>> EE =-0.06895.4042-5.4093(4)给出系统开环脉冲响应和阶跃响应的曲线(a)开环脉冲响应曲线(b)阶跃响应曲线四、思考题(1)由状态空间方程转化为传递函数,是否与直接计算传递函数相等?答:由状态空间方程转化为传递函数:>> gso=tf(sys)Transfer function from input to output...0.7391 s^2 - 6.565e-016 s - 20.13#1: ---------------------------------------s^4 + 0.07391 s^3 - 29.23 s^2 - 2.013 s2.054 s + 4.587e-016#2: -----------------------------------s^3 + 0.07391 s^2 - 29.23 s - 2.013#1为gspo传递函数,#2为gs的传递函数而直接得到的传递函数为:>> gspoTransfer function:0.7391 s^2 - 20.13---------------------------------------s^4 + 0.07391 s^3 - 29.23 s^2 - 2.013 s>> gsTransfer function:2.054 s-----------------------------------s^3 + 0.07391 s^2 - 29.23 s - 2.013通过比较可以看到,gspo由状态空间方程转化的传递函数比直接得到的传递函数多了s的一次项,而6.565e-016非常小几乎可以忽略不计,因此可以认为两种方法得到的传递函数式相同的,同理传递函数gs也可以认为是相同的。
倒立摆平台下的现代控制理论综合实验教学方法分析
于一个控制系统的实现往往没有具体的概念 。 通过 对倒立摆系 统的结构及 原理 的认识 , 可 以让学生具 体 的了解一 个控制系统 的实现 。 从理论 上的控制系统概 念到具体 的控制实现 , 改变 了 以往的教条模 式 , 实现了理论与实践的结合。
二、 现代控 制理论综合实验教学改革
学 的倒立摆综合实验 教学 方法。
一
、
倒立摆实验系统 的硬件构成及原理
倒立摆 是指摆 杆处于倒置不稳 定状态 , 能够人为控制使其
处于动 态平衡 的一种机 构,由一个 可以再水平 轨 道上 自由移动
内蒙古科 技大学现代控制理论 教学 大纲要求课堂 教学 3 2 学 时, 实 验8 学时。 为了改善 学生对抽象概 念及理论知识 的认识 , 为了提高学生解 决实 际问题 的能力 , 针对 内蒙 古科技 大学大部 分学 生的基础水平 偏差 的现状 及实验室现有 的设备 , 对现代控
关键词 : 倒 立摆 ; 现 代控 制 理论 ; 综合 实验
作者简介: 张勇( 1 9 8 1 一 ) , 男, 山东临清人, 内蒙古科技大学信息工程学院, 讲师; 贺美琳 ( 1 9 9 1 一 ) , 女, 河北保定人, 内蒙古科技大学信 息工程学院硕士研 究生。( 内蒙古 包头 0 1 4 0 1 0 )
“ 现代 控制 理论 ” 是“ 自动控 制原 理 ”的后 续 课程 , 也是 硕士研 究 生 “ 线性 系统 理论 ”和 “ 最优 控制理 论”等课 程 的基 础课 程 , f I 作 为内蒙古科 技 大学 自动化 本科专业 的基础课 和重 点课 程 ,“ 现代控 制理论 ”的教学改 革多 年来 一直受 到教 师和 学生 的关 注。内蒙古 科技 大学是一所 普通本 科 院校 , 学生普遍 理论 基础 偏差 , 而 现代 控制 理论 对数 学及 相关 理 论 的依 赖较
matlab仿真毕设--倒立摆现代控制理论研究
内蒙古科技大学本科生毕业设计说明书(毕业论文)题目:倒立摆现代控制理论研究倒立摆现代控制理论研究摘要倒立摆系统是一个复杂的非线性、强耦合、多变量和自不稳定系统。
在控制工程中,它能有效地反映诸如可镇定性、鲁棒性、随动性以及跟踪性等许多控制中的关键问题,是检验各种控制方法的理想工具。
理论是工程的先导,它对倒立摆系统的控制研究具有重要的工程背景,单级倒立摆与火箭的飞行有关,二级倒立摆与双足机器人的行走有相似性,日常生活中的任何重心在上,支点在下的问题都与倒立摆的控制有极大的相似性,所以对倒立摆的稳定控制有重大的现实意义。
迄今,人们已经利用古典控制理论、现代控制理论及多重智能控制理论实现了多种倒立摆系统的稳定控制[5]。
倒立摆的控制方法有很多,如状态反馈控制,经典PID控制,神经网络控制,遗传算法控制,自适应控制,模糊控制等。
其控制方法已经在军工、航天、机器人和一般工业过程等领域得到了应用。
因此对倒立摆系统的控制研究具有重要的理论和现实意义,成为控制领域中经久不衰的研究课题。
本文是应用线性系统理论中的极点配置、线性二次型最优(LQR)和状态观测器等知识,设计了倒立摆系统线性化模型的控制器,通过MA TLAB仿真,研究其正确性和有效性。
通过分析仿真结果,我们知道了,状态反馈控制可以使倒立摆系统很好的控制在稳定状态,并具有良好的鲁棒性。
关键词:倒立摆;现代控制;Matlab仿真;Modern Control Theory Of Inverted PendulumAbstractInverted pendulum system is a complex nonlinear and strongly coupled,multi-variable and unstable system since.In control engineering,it can effectively reflect such stabilization,robustness,with the mobility of control and tracking,and many other key issue,It is the test ideal for a variety of control methods.Theory is the project leader,inverted pendulum control system also has important engineering research background,inverted pendulum with single-stage related torocket for the flight,Inverted pendulum and biped walking robot similar nature in any life in the center of gravity,the fulcrum in the next issue with the inverted pendulum control has a great similarity,so the stability control of inverted pendulum significant practical significance.So far,it has been the use of classical control theory,modern control theory and control theory of multiple intelligence to achieve a variety of inverted pendulum system stability control[5].Inverted pendulum control methods there are many,such as the state feedback control,the classic PID control,neural network control,genetic algorithm control,adaptive control,fuzzy control.The control method has been in military,aerospace,robotics and general industrial processes and other areas have been intended use.Therefore,the control of inverted pendulum system research has important theoretical and practical significance,of becoming enduring research topics in the field.This is the application of the theory of linear systems pole placement,linear quadratic optimal (LQR) and the state observer of such knowledge,the design of the linear inverted pendulum model of the controller,through simulation to study the correctness and effective sex.By analyzing the results of MATLAB simulation,state feedback control can make a goodcontrol of inverted pendulum system in a stable state,and has good robustness,stability control features.Key words: Inverted pendulum;Modern control;Matlab simulation;目录摘要 (I)Abstract (II)第一章绪论 (1)1.1倒立摆系统模型简介 (1)1.2倒立摆研究的背景与意义 (2)1.3国内外研究现状、水平和发展趋势 (3)1.3.1倒立摆和控制理论的发展 (3)1.3.2倒立摆的控制方法 (4)1.3.3倒立摆的发展趋势 (5)1.4本论文的主要工作介绍 (6)第二章一级倒立摆的数学模型建立及其性能分析 (7)2.1 系统的组成 (7)2.2 一级倒立摆数学模型的建立 (8)2.2.1 数学模型的建立 (8)2.2.2 系统的结构参数 (9)2.2.3 用牛顿力学方法来建立系统的数学模型 (9)2.2.4 一级倒立摆的性能分析[7] (13)2.3 本章小结 (15)第三章现代控制理论在倒立摆控制中的应用 (16)3.1 自动控制理论的发展历程 (16)3.2 经典控制理论 (18)3.2.1 PID控制现状 (18)3.2.2 PID控制的基本原理 (18)3.2.3 常用PID数字控制系统 (20)3.3 现代控制理论 (21)3.3.1 极点配置[11] (22)3.3.2 线性二次型最优的控制理论[7,8] (24)3.3.3 加权矩阵的选取 (26)3.3.4 状态观测器[7] (26)3.4 本章小结 (29)第四章MA TLAB仿真技术 (30)4.1 仿真软件——Matlab简介 (30)4.1.1 MA TLAB的优势 (30)4.2 Simulink简介 (32)4.3 S-函数简介 (33)4.3.1 用M文件创建S-函数 (34)4.4 倒立摆仿真模块的建立 (36)4.5 本章小结 (37)第五章一级倒立摆线性模型系统的仿真 (38)5.1 倒立摆控制器结构选择 (38)5.2 一级倒立摆线性模型系统仿真 (38)5.2.1 Simulink仿真 (42)5.3 本章小结 (46)结束语 (48)参考文献 (49)附录A (51)致谢 (53)第一章绪论1.1倒立摆系统模型简介倒立摆控制系统是一个复杂的、不稳定的、非线性的系统,是进行控制理论教学及开展各种控制实验的理想实验平台,但它并不是我们想象的那样抽象,其实在我们日常生活中就有很多这样的例子。
(完整)现代控制理论-大作业-倒立摆
摘要倒立摆系统是一个复杂的、高度非线性的、不稳定的高阶系统,是学习和研究现代控制理论最合适的实验装置。
倒立摆的控制是控制理论应用的一个典型范例,一个稳定的倒立摆系统对于证实状态空间理论的实用性是非常有用的.本文主要研究的是二级倒立摆的极点配置方法,首先用Lagrange方程建立了二级倒立摆的数学模型,然后对二级倒立摆系统的稳定性进行了分析和研究,并给出了系统能控能观性的判别。
基于现代控制理论中的极点配置理论,根据超调量和调整时间来配置极点,求出反馈矩阵并利用Simulink对其进行仿真,得到二级倒立摆的变化曲线,实现了对闭环系统的稳定控制。
关键词:二级倒立摆;极点配置;Simulink目录1.绪论 (1)2 数学模型的建立和分析 (1)2。
1 数学建模的方法 (1)2。
2 二级倒立摆的结构和工作原理 (2)2。
3 拉格朗日运动方程 (3)2。
4推导建立数学模型 (3)3 二级倒立摆系统性能分析 (9)3.1 稳定性分析 (9)3。
2 能控性能观性分析 (10)4 状态反馈极点配置 (11)4。
1 二级倒立摆的最优极点配置1 (11)4.2 二级倒立摆最优极点配置2 (12)5。
二级倒立摆matlab仿真 (14)5。
1 Simulink搭建开环系统 (14)5.2 开环系统Simulink仿真结果 (14)5.3 Simulink搭建极点配置后的闭环系统 (15)5.4极点配置Simulink仿真结果 (16)5.4。
2 第二组极点配置仿真结果 (18)6。
结论 (19)7.参考文献 (20)附录一 (21)1.绪论倒立摆最初诞生于麻省理工学院,仅有一级摆杆,另一端铰接于可以在直线导轨上自由滑动的小车上.后来在此基础上,人们又进行拓展,设计出了直线二级倒立摆、环型倒立摆、平面倒立摆、柔性连接倒立摆、多级倒立摆等实验设备。
在控制理论的发展过程中,为验证某一理论在实际应用中的可行性需要按其理论设计的控制器去控制一个典型对象来验证。
重庆大学先进控制(倒立摆)实验报告
专业实验报告
图3调节出的PID 控制器
获得理想响应曲线后,记录相应的D K 、P K 、I K ,将该组数据代入实物系统,观察倒立摆系统的稳态稳定情况,并据此再次调节D K 、P K 、I K ,直至达到理想效果为止。
已知2+(8)I D P I
PID
P D K K s K s K C K K s s s
+++=(s)=
图5 直线一级倒立摆 PID 控制界面
图6 直线一级倒立摆PID 控制实验结果倒立摆系统状态空间模型
图7 图8
图9 状态空间极点配置实物控制平台
选取了合适的4个闭环极点并通过了仿真测试后即可进行倒立摆系统实物控制。
进入MATLAB Simulink 实时控制工具箱“Googol Education Products”打开“Inverted Pendulum\Linear Inverted Pendulum\Linear 1-Stage IP Swing-UpControl”中的“Swing-Up Control Demo,如图10
图10 状态空间极点配置实物控制效果
(此表在授位前请放入硕士学位申请书中相应位置)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要倒立摆系统是一个复杂的、高度非线性的、不稳定的高阶系统,是学习和研究现代控制理论最合适的实验装置。
倒立摆的控制是控制理论应用的一个典型范例,一个稳定的倒立摆系统对于证实状态空间理论的实用性是非常有用的。
本文主要研究的是二级倒立摆的极点配置方法,首先用Lagrange方程建立了二级倒立摆的数学模型,然后对二级倒立摆系统的稳定性进行了分析和研究,并给出了系统能控能观性的判别。
基于现代控制理论中的极点配置理论,根据超调量和调整时间来配置极点,求出反馈矩阵并利用Simulink对其进行仿真,得到二级倒立摆的变化曲线,实现了对闭环系统的稳定控制。
关键词:二级倒立摆;极点配置;Simulink目录1.绪论..............................................................2 数学模型的建立和分析..............................................2.1 数学建模的方法..................................................2.2 二级倒立摆的结构和工作原理......................................2.3 拉格朗日运动方程................................................2.4推导建立数学模型.................................................3 二级倒立摆系统性能分析............................................3.1 稳定性分析....................................................3.2 能控性能观性分析..............................................4 状态反馈极点配置..................................................4.1 二级倒立摆的最优极点配置1.....................................4.2 二级倒立摆最优极点配置2.........................................5. 二级倒立摆matlab仿真............................................5.1 Simulink搭建开环系统............................................5.2 开环系统Simulink仿真结果.......................................5.3 Simulink搭建极点配置后的闭环系统................................5.4极点配置Simulink仿真结果........................................5.4.1 第一组极点配置仿真结果........................................5.4.2 第二组极点配置仿真结果........................................6.结论..............................................................7.参考文献..........................................................附录一..............................................................1.绪论倒立摆最初诞生于麻省理工学院,仅有一级摆杆,另一端铰接于可以在直线导轨上自由滑动的小车上。
后来在此基础上,人们又进行拓展,设计出了直线二级倒立摆、环型倒立摆、平面倒立摆、柔性连接倒立摆、多级倒立摆等实验设备。
在控制理论的发展过程中,为验证某一理论在实际应用中的可行性需要按其理论设计的控制器去控制一个典型对象来验证。
倒立摆系统作为一个实验装置,形象直观,结构简单,成本低廉;作为一个控制对象,他又相当复杂,同时就其本身而言,是一个高阶次、不稳定、多变量、非线性、强耦合系统,只有采取行之有效的控制方法才能使之稳定,因此倒立摆装置被公认为是自动控制理论中的典型实验设备。
综合文献资料,倒立摆控制的方法主要有:PID控制,状态反馈,利用云模型,神经网络控制,遗传算法,自适应控制,模糊控制,变论域自适应模糊控制理论,智能控制等多种算法来实现倒立摆的控制。
本文主要构建二级倒立摆的数学模型的建立与分析,对倒立摆系统进行控制方法的研究。
本文就以下几个问题进行了论述。
1.二级倒立摆的数学模型的建立与分析。
在建模部分,首先采用拉格朗日方程推导数学模型,并对系统的可控性可观性进行分析,并分析倒立摆系统控制的难易程度。
2.二级倒立摆的控制原理及方法的研究。
本文主要采用状态反馈极点配置的方法对二级倒立摆进行研究。
3.采用Matlab语言进行数字仿真,分析仿真结果。
2 数学模型的建立和分析2.1 数学建模的方法所谓系统的数学模型就是利用数学结构来反映系统内部之间、内部与外部某些因素之间的精确的定量的表示。
它是分析、设计、预报和控制一个系统的基础,所以要对一个系统进行研究,首先要建立它的数学模型。
建立倒立摆系统的模型时,一般采用牛顿运动规律,结果要解算大量的微分方程组,而且考虑到质点组受到的约束条件,建模问题将更加复杂,为此本文采用分析力学方法中的Lagrange方程推导倒立摆的系统模型。
Lagrange方程有如下特点:1.它是以广义坐标表达的任意完整系统的运动方程式,方程式的数目和系统的自由度是一致的。
2.理想约束反力不出现在方程组中,因此在建立运动方程式时,只需分析已知的主动力,而不必分析未知的约束反力。
grange方程是以能量观点建立起来的运动方程,为了列出系统的运动方程,只需要从两个方面去分析,一个是表征系统运动的动力学量-系统的动能,另一个是表征主动力作用的动力学量-广义力。
因此用Lagrange方程来求解系统的动力学方程可以大大简化建模过程。
2.2 二级倒立摆的结构和工作原理如图2.1,系统包括计算机、运动控制卡、伺服机构、倒立摆本体(小车,上摆,下摆,皮带轮等)和光电码盘几大部分,组成了一个闭环系统。
光电码盘1将小车的位移、速度信号反馈给伺服驱动器和运动控制卡,下面一节摆杆(和小车相连)的角度、角速度信号由光电码盘2反馈回控制卡和伺服驱动器,上面一节摆杆的角度和角速度信号则由光电码盘3反馈。
计算机从运动控制卡中读取实时数据,确定控制决策(小车向哪个方向移动、移动速度、加速度等),并由运动控制卡来实现该控制决策,产生相应的控制量,使电机转动,带动小车运动,保持两节摆杆的平衡。
图2.1 系统结构和工作原理图2.3 拉格朗日运动方程拉格朗日提出了用能量的方法推导物理系统的数学模型,首先我们引入广义坐标,拉格朗日方程。
广义坐标:系统的广义坐标是描述系统运动必需的一组独立坐标,广义坐标数等同于系统自由度数。
如果系统的运动用n维广义坐标q1,q2,…q n来表示,我们可以把这n维广义坐标看成是n维空间的n位坐标系中的坐标。
对于任一系统可由n维空间中的一点来表征。
系统在n维空间中运动形成的若干系统点连成一条曲线,此曲线表示系统点的轨迹。
拉格朗日方程:L(q,q̇)=T(q,q̇)−V(q,q̇)(2.1) 式中,L——拉格朗日算子,q——系统的广义坐标,T——系统的动能,V——系统的势能。
拉格朗日方程由广义坐标i q和L表示为:d dt ?L ?q i −?L?q i=f i (2.2)式中,n i 3,2,1=,i f ——系统沿该广义坐标方向上的外力,在本系统中,设系统的三个广义坐标分别是21,,θθx 。
2.4推导建立数学模型在推导数学模型之前,我们需要几点必要的假设: 1.上摆、下摆及小车均是刚体;2.皮带轮与传动带之间无相对滑动;传动皮带无伸长现象;3.小车运动时所受的摩擦力正比于小车的速度;4.小车的驱动力与直流放大器的输入成正比,且无滞后,忽略电机电枢绕组中的电感;5.下摆转动时所受到的摩擦力矩正比于下摆的转动速度;6.上摆运动时所受到的摩擦力矩正比于上摆对下摆的相对角速度; 二级倒立摆的运动分析示意图如图2.2图2.2 二级倒立摆运动分析示意图倒立摆系统参数如下: 小车系统的等效质量M =1.32Kg 摆杆1 质量1m =0.04Kg 摆杆1 转动中心到杆质心距离1l =0.09m 摆杆2 质量m 2=0.132Kg摆杆2 转动中心到杆质心距离l 2=0.27m质量块质量3m =0.208Kg 作用在系统上的外力F摆杆1 与垂直向上方向的夹角1θ 摆杆2 与垂直向上方向的夹角2θ首先,计算系统的动能:321m m m M T T T T T +++=(2.3)M T 小车动能:T M =12Mẋ2(2.4)1m T 摆杆1动能:111m m m T T T ''+'=(2.5)式中,T m1′--摆杆1质心平东动能T m1′′--摆杆1绕质心转动动能22'111111(sin )(cos )12m d x l d l T m dt dt θθ⎛⎫-⎛⎫⎛⎫=+= ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭⎝⎭2221111111111cos 22m x m l x m l θθθ-+(2.6) 212112121121''161312121θθω l m l m J T p m =⎪⎪⎭⎫ ⎝⎛==(2.7)则21211111121''1'1132cos 21θθθ l m x l m x m T T T m m m +-=+= (2.8)2m T 摆杆2动能:222m mm T T T ''+'= (2.9)式中,T m2′--摆杆1质心平东动能T m2′′--摆杆1绕质心转动动能()()22211122*********12cos cos 2sin sin 22m x l l m l l θθθθθθθθ=--++(2.10) 2222222222222''261312121θωω l m l m J T m =⎪⎭⎫ ⎝⎛==(2.11)()⎪⎭⎫ ⎝⎛-+++122121222221212cos 434421θθθθθθ l l l l m(2.12)3m T 质量块动能:2223311131112cos 22m x m l x m l θθθ=-+ (2.13) 因此,可以得到系统总动能:212131113232cos 221θθθ l m x l m x m +-+ (2.14)系统的势能为:()11131121122cos 2cos 2cos cos m gl m gl m g l l θθθθ=+++(2.15)至此得到拉格朗日算子L :()22112113cos cos 2cos 2θθθl l g m gl m +--(2.16)由于因为在广义坐标21,θθ上均无外力作用,有以下等式成立:011=∂∂-⎪⎪⎭⎫ ⎝⎛∂∂θθL L dt d (2.17)022=∂∂-⎪⎪⎭⎫ ⎝⎛∂∂θθL L dt d (2.18)展开(2.17)、(2.18)式,分别得到(2.19)、(2.20)式 0))cos sin ))((2(11321=++++θθxg m m m (2.19)22111222112123sin 6sin()46cos()3cos 0g l l l x θθθθθθθθθ---++--= (2.20)将(2.19)、(2.20)式对21,θθ 求解代数方程,得到以下两式 )))(cos 912124(2(21223211θθ-+---m m m m l(2.21)))(cos 4))(3(916(21222212222213212θθ-+++-l l m l l m m m m (2.22) 表示成以下形式: ),,,,,,(212111x x x f θθθθθ= (2.23)),,,,,,(212122x x x f θθθθθ=(2.24)取平衡位置时各变量的初值为零,1212(,,,,,,)(0,0,0,0,0,0,0)0A x x x θθθθ===(2.25)将(2.23)式在平衡位置进行泰勒级数展开,并线性化,令11100A f K x=∂==∂(2.26)1231120112313(244)2(4312)A gm gm gm f K m m m l θ=---∂==∂---(2.27)121302123192(4312)A f m gK m m m l θ=∂==∂---(2.28) 11400A f K x=∂==∂(2.29)115010A f K θ=∂==∂ (2.30)116020A f K θ=∂==∂(2.31)123117012313(24)2(4312)A m m m f K xm m m l =---∂==∂---(2.32)得到线性化之后的公式x K K K 172131121++=θθθ(2.33)将),,,,,,(212122x x x f θθθθθ=在平衡位置进行泰勒级数展开,并线性化,令22100A f K x=∂==∂(2.34)123222012212322(2())164(3())9A g m m m f K m l m m m l θ=++∂==∂-++ (2.35)123223022212324(3())163(4(3()))9A g m m m f K m l m m m l θ=++∂==-∂-++ (2.36) 22400A f K x=∂==∂(2.37)225010A f K θ=∂==∂ (2.38)226020A f K θ=∂==∂(2.39)123123227022123242(2())(3()3164(3())9A m m m m m m f K xm l m m m l =++-++∂==∂-++ (2.40)得到x K K K 272231222++=θθθ(2.41)即:x K K K 172131121++=θθθ (2.42)x K K K 272231222++=θθθ(2.43)现在得到了两个线性微分方程,由于我们采用加速度作为输入,因此还需加上一个方程:xu = (2.44)取状态变量如下:⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧======2615423121θθθθ x x x x x x x x (2.45)则状态空间方程如下:u K K x x x x x x K K K K x x x x x x⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡271765432123221312654321100000000000000000100000010000001000(2.46)将以下参数代入 ⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧=======27.009.08.9208.0132.004.032.121321l l g m m m M 求出各个K 值:得到状态方程各个参数矩阵: 3 二级倒立摆系统性能分析 3.1 稳定性分析二级倒立摆的特征方程为:det()0I A λ-= (3.1)Matlab 中,用函数eig(A )来计算系统矩阵的特征值,经过计算,系统的特征值为:[]9.5972 4.77259.5972 4.772500λ=-- (3.2) 开环系统有两个开环极点位于S 平面右半平面上,所以系统是不稳定的。