三角网条件平差计算
全国三、四等三角网地心坐标平差

要 :为 了配合 2 0 0 0国家大地坐标 系的推广应用 ,通过对全 国三 、四等三角网进行地心 坐标平差,将其
成 果纳入到 2 0 0 0国家大地坐标系 中 平差 工作主要 包含以下几个方面:观测数据 的分析和整理;起 算点 的
分析与确定;观测元素 的归算;平差 计算和平差成果的分析 ;平差成果的外部检核
天 文大 地 网与 高精度 G S20 网联 合平 差 ”( P 0 0 以下 简 称两 网平差 ) 0 4 20 ,在我 国部 分地 区又 。2 0 - 08年
CC 20 G S 0 0启用 奠定 了基础 。 为 了推 广 C C 2 0 ,需要将 原有 的 国家基 本 比 GS0 0
标 差值 在 0 . ~O 2I n以内的点 ,可认 为是 同一点 。 重 复利 用 方 向 的确 定原 则 :当 某一 组观 测方 向
各观测 权标 志对应 测角 中误差 计算 公式 : 方 向中误差计 算公式 :
地心坐标平差。 2 .采用 平差基 准及工 艺流程 如 图 1所示
m=m / 2 √ 测距 边权 的确 定公式 :
= +6 ) P = / m 2
() 2
( 3)
3 3起 算 点 的分析 确 定及取 用原 则 .
( )对省 级大地 水准 面精化 项 目中布设 的 G S 1 P
B 、C级 点 ,依 据 G S点点之记 、选 埋和观 测总结 中 P
记载 的 G S点与 三角 点的重 合情 况 ,经过分 析试算 , P
满足 条件 的点 。 ( )“ 网平 差 ”项 目中 已确 定 的重 合 点 ,经 2 两 分析 与三 、四等三 角 网点也重 合 的点 。 ( )参加 了 “ 网平 差 ”的天文大地 网成 果点 3 两 和 二 改 网成 果点 ,在 原三 四等 网分 区平 差 时作 为起
12.1三角网坐标平差

§12.1三角网坐标平差第十二章概述间接平差又称参数平差。
水平控制网按间接平差时,通常选取待定点的坐标平差值作为未知数(按方向平差时,还增加测站定向角未知数),平差后直接求得各待定点的坐标平差值,故这种以待定点坐标作为未知数的间接平差法也称为坐标平差法。
参加平差的量可以是网中的直接观测量,例如方向、边长等;也可以是直接观测量的函数,例如角度等。
由于三角网的水平角一般是采用方向观测法观测,并由相邻方向相减而得,故它们是相关观测值。
此时,若不顾及函数间的相关性,平差结果将受到一定的曲解。
因此,坐标平差法都按方向平差。
间接平差的函数模型是误差方程,它是表达观测量与未知数之间关系的方程式。
一般工程测量平面控制网的观测对象主要是方向(或角度)和相邻点间的距离(即边长)因此坐标平差时主要列立各观测方向及观测边长的误差方程式,再按照间接平差法的原理和步骤,由误差方程和观测值的权组成未知数法方程去解算待定点坐标平差值,并进行精度评定。
本章主要研究(测)方向网、测边网以及测边测角网的严密坐标平差。
水平控制网按坐标平差法进行平差时,为降低法方程的阶数以便于解算,定向角未知数可采用一定的法则予以消掉。
由于误差方程式的组成简单且有规律,便于由程序实现全部计算,因此,在近代测量平差实践中,控制网按间接平差法得到了广泛的应用。
平面控制网按坐标平差时,网中每一观测值都应列立一个误差方程式。
为便于计算,通常总是将观测值改正数表示为对应待定点坐标近似值改正数的线性式。
坐标平差的第一步是列组误差方程式。
对于方向网而言,参与平差的观测值是未定向的方向,选定的未知数是待定点的纵、横坐标值。
误差方程式就是方向观测值改正数表达为待定点纵横坐标值的函数式,可以通过坐标方位角来建立方向值与未知数之间的联系。
12.1.1方向误差方程式的建立和组成在测站k 上观测了n i k k k ,,,0 等方向 其方向观测值为kn ki k N N N ,,,0 它们的改正数为kn ki k V V V ,,,00k 为测站的零方向(起始方向),则任意方向i k 的坐标方位角平差值方程为ki ki k k ki k ki V N Z N Z +++=+=ςα (12-1)式中:ki N 为ki 方向的平差值,k Z 为0k 方向的坐标方位角,通常称测站定向角,k Z 为定向角k Z 的近似值,k ς为定向角k Z 的改正数,是个未知参数,k k k Z Z ς+=,ki ki ki V N N +=如果令i k ,两点的近似坐标分别为00,kk y x 和00,i i y x ,其相应的改正数分别为k k y x δδ,和i i y x δδ,,则有关系:iii i i i y y y x x x δδ+=+=00ki ki ki δααα+=0(12-4)ki k i ki x x y y arctg--=α (12-3)()()()()kkiik k i i kikix xx xy y y y arctgδδδδδαα+-++-+=+00000将上式按台劳级数展开,()()k k ki i i ki k k kii iki kik i ki kiy yy yx x x xx xy y arctgδαδαδαδαδαα000000000⎪⎪⎭⎫ ⎝⎛∂∂+⎪⎪⎭⎫ ⎝⎛∂∂+⎪⎪⎭⎫⎝⎛∂∂+⎪⎪⎭⎫ ⎝⎛∂∂+--=+k k ki i i ki k k ki i i ki kiy yy yx xx xδαδαδαδαδα0000⎪⎪⎭⎫ ⎝⎛∂∂+⎪⎪⎭⎫ ⎝⎛∂∂+⎪⎪⎭⎫ ⎝⎛∂∂+⎪⎪⎭⎫ ⎝⎛∂∂= ()()()()20020020000200002000sin 1kiki kikikikiki k ikik iki k ki S S y yyxxy y x x y y xxy y xαα=∆=-+--=⎪⎪⎭⎫⎝⎛--+--=⎪⎪⎭⎫ ⎝⎛∂∂坐标方位角改正数方程:()()()()ikikii kikik kikik kikikiy S y x S y y S x x S y δδδδδα200200200200∆+∆-∆-∆=(12-5)将(12-5)代入(12-4)然后再代入(12-1)得:kkk k kk y y y x x x δδ+=+=00()()()()ki i kikii kikik kikik kikik ki l y S y x S y y S x x S y V +∆+∆-∆-∆+-=δδδδς200200200200(12-6)式中,k ki ki ki Z N l --=0α (12-7)计算中,ki S 以㎏为单位,k k y x δδ,和i i y x δδ,以dm 为单位,且换以ηδξδ==y x 1010(12-6)变为,ki i ki i ki k ki k ki k ki l b a b a V +--++-=ηξηξς (12-8)式中,40410cos 10sin kiki ki kikiki S b S a αραρ''-=''=(10-9) (12-6)和(12-8)式为方向误差方程式,考虑到边长误差方程式(12-35)式以便于编程常用(12-8)式。
如何进行矩形网平差与三角网平差

如何进行矩形网平差与三角网平差矩形网平差与三角网平差是测量领域中常用的数据处理方法,用于处理测量数据的精度和可靠性。
在本文中,我们将探讨如何进行矩形网平差与三角网平差,并阐述其应用和优势。
1. 矩形网平差矩形网平差是一种平差方法,通过测量网格内的控制点坐标,对其进行数据处理,从而得到一个精确的网格模型。
这种方法适用于大范围的测量工作,如大型土地测量、城市规划等。
在进行矩形网平差时,首先需要建立一个基准点,作为整个网格的参考点。
然后,通过使用测量仪器(如全站仪)测量每个网格点的坐标,得到初始数据。
接下来,利用平差软件对这些初始数据进行处理,并生成一个平差网格模型。
最后,对平差后的数据进行检查和验证,确保其精度和可靠性。
矩形网平差的优势在于其精度高、处理效率高,适用于大范围的测量工作。
同时,通过建立一个基准点,可以减小误差的累积效应,提高数据的可靠性。
2. 三角网平差三角网平差是一种基于三角形关系的平差方法,通过测量控制点之间的距离和角度,对整个测量区域进行数据处理。
这种方法适用于较小范围的测量工作,如建筑测量、道路测量等。
进行三角网平差时,首先需要选取几个控制点,并测量它们之间的距离和角度。
然后,利用三角形关系,计算其他点的坐标。
接着,对测量数据进行平差处理,生成一个精确的三角网模型。
最后,对平差后的数据进行验证,确保其精度和可靠性。
三角网平差的优势在于其计算简单、处理效率高,适用于小范围的测量工作。
同时,通过利用三角形关系,可以减小误差的累积效应,提高数据的可靠性。
3. 应用与发展矩形网平差与三角网平差在测量领域有着广泛的应用。
它们可以用于建筑测量、道路测量、土地测量等工程项目,以及地质勘探、环境监测等科学研究。
随着技术的进步和应用需求的不断增长,矩形网平差与三角网平差也在不断发展。
现代的测量仪器和平差软件可以更加准确地获取和处理测量数据,提高测量的精度和效率。
同时,引入了新的理论和方法,如卫星定位技术、地理信息系统等,进一步改进了矩形网平差与三角网平差的应用效果。
三角网平差方法的原理和实际应用

三角网平差方法的原理和实际应用引言:三角网平差方法是测量工程中常用的一种数据处理方法,它能够通过三角形的几何关系来计算测量点的坐标,具有简单、高效的特点。
本文将详细介绍三角网平差方法的原理及其在实际测量中的应用。
一、三角网平差方法的原理三角网平差方法是基于三角形的相似性原理进行测量计算的一种数学模型,其原理基于以下几个关键点:1. 角度平差原理:三角网平差方法中,首先需要对测量角度进行平差。
角度平差是通过比较测量角度与理论角度之间的差异,使用最小二乘法进行计算和调整,使角度的测量误差最小化。
2. 边长平差原理:在测量中,除了测量角度外,还需要测量各个三角形边长。
边长平差是通过比较测量边长与理论边长之间的差异,同样使用最小二乘法进行计算和调整,使边长的测量误差最小化。
3. 角边关系原理:在三角形中,通过一个已知边长和一个已知角度可以确定另外两边的长度。
三角网平差方法利用这种角边关系,通过已知的边长和角度,计算未知点的坐标。
二、三角网平差方法的实际应用三角网平差方法在实际测量中具有广泛的应用,以下是几个常见的实际应用场景:1. 工程测量:在大型工程测量中,如建筑施工、道路规划等,常需利用三角网平差方法计算出各个测点的坐标,以确定设计图纸的准确位置。
通过对测量角度和边长进行平差,可以提高测量结果的精确性和可靠性。
2. GPS定位:全球定位系统(GPS)是一种利用卫星信号确定地球上任意点位置的技术,而三角网平差方法是GPS定位中常用的数学模型。
通过利用多个卫星信号同时测量,然后应用三角网平差方法计算出接收器的位置坐标,从而实现精确的定位。
3. 摄影测量:在航空摄影测量中,常常需要将航空摄影图像转化为地面坐标。
通过测量图像上的人工控制点和摄影机的方位元素,利用三角网平差方法可以计算出图像上任意点的地面坐标,从而实现对地理信息的精确提取。
4. 地质测量:地质勘探中常常需要对地质构造进行测量和分析。
三角网平差方法可以用于分析地形形态、测量地壳变形和地震断层等地质现象,为地质工作者提供重要的数据支持。
网平差(三角网,三边,导线网)

五.三角网平差图9-1表示在高级点A 、B 下加密新点P1,P2的三角网,网中观测了12个方向值L1,L2,...,L12。
试平差此三角网,求:(1)待定点P1及P2的坐标平差值及其中误差;(2)P1与P2点的相对点位中误差。
P 2图9-1 三角网表9-3 三角网观测数据六.三边网平差已知图9-2中的起算数据及观测边长,试平差此三边网,求各观测边长和待定点坐标的平差值,以及各待定点的点位中误差。
P 2P P 4P 56图9-2 三边网表9-4 三边网已知及观测数据1 5 760.706 4 7 838.880 7 5 438.382 2 7 804.566 5 5 483.158 8 7 493.323 3 5 187.3426 5 731.7889 8 884.587107 228.367七.导线网平差图9-3为敷设在已知点A 、B 、C 间的单结点导线网,网中观测了12个角度,丈量了9个导线边。
起算数据和观测结果见表9-5。
已知测角中误差14m β''=±,边长丈量中误差i s m =±。
求各导线点的坐标的平差值;观测值的中误差,9号点及结点G 的点位中误差。
AαB图9-3 导线网表9-5 导线网已知及观测数据 A 11678.714 8419.242 A274 23 34 B 10878.302 8415.114 B α 8 10 27 C 11131.959 7722.199α194 20 121221.6504189.7817148.3372 195.843 5 98.163 8 151.4803 229.356 6 154.773 9 187.751。
测边测角三角网的平差
测边测角三角网的平差王庆峰(新疆阿希金矿伊宁835100)随着激光测距仪和电算技术的发展,全站仪已在工程测量中广泛使用,工程控制网中逐渐采用了测边测角网的布设方案。
边、角网的平差,其方法与三角网的平差方法类似。
只是在平差时尚需对边长观测值亦作相应的平差改正。
下面分别讨论测边测角网平差时的条件方程式形式、个数等有关问题。
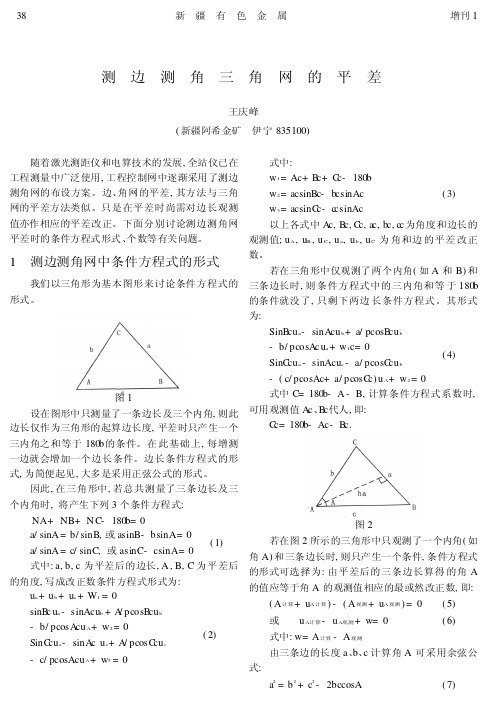
1测边测角网中条件方程式的形式我们以三角形为基本图形来讨论条件方程式的形式。
图1设在图形中只测量了一条边长及三个内角,则此边长仅作为三角形的起算边长度,平差时只产生一个三内角之和等于180b的条件。
在此基础上,每增测一边就会增加一个边长条件。
边长条件方程式的形式,为简便起见,大多是采用正弦公式的形式。
因此,在三角形中,若总共测量了三条边长及三个内角时,将产生下列3个条件方程式:NA+NB+N C-180b=0a/sinA=b/sinB,或asinB-bsinA=0a/sinA=c/sinC,或asinC-csinA=0(1)式中:a,b,c为平差后的边长,A,B,C为平差后的角度,写成改正数条件方程式形式为:u a+u b+u c+W1=0sinB c u a-sinAcu b+A/pcosB cu b-b/pcosA cu A+w2=0 S++3=(2)式中:w1=Ac+B c+C c-180bw2=acsinBc-b csinAcw3=acsinC c-c csinAc(3)以上各式中A c,B c,C c,a c,b c,c c为角度和边长的观测值;u A,u B,u C,u a,u b,u C为角和边的平差改正数。
若在三角形中仅观测了两个内角(如A和B)和三条边长时,则条件方程式中的三内角和等于180b的条件就没了,只剩下两边长条件方程式。
其形式为:SinB cu a-sinA cu b+a/pcosB cu b-b/pcosA c u a+w1c=0SinC cu a-sinAcu c-a/pcosC cu b-(c/pcosAc+a/pcosC c)u A+w2=0(4)式中C=180b-A-B,计算条件方程式系数时,可用观测值A c、B c代人,即:C c=180b-Ac-Bc.图2若在图2所示的三角形中只观测了一个内角(如角A)和三条边长时,则只产生一个条件,条件方程式的形式可选择为:由平差后的三条边长算得的角A的值应等于角A的观测值相应的最或然改正数,即:(A计算+u A计算)-(A观测+u A观测)=0(5)或u A计算-u A观测+w=0(6)式中:w=A计算-A观测由三条边的长度、、计算角可采用余弦公式=+()38新疆有色金属增刊1inC cu a-sinA c u c A/pcosC cu c -c/pcosAcu A w0a b c A:a2b2c2-2bccosA7即:A 计算=cos-1b 2+c 2-a 2/2bc(8)为了求得u A 计算,微分(7)式得:2ada=2bdb+2cdc-2ccosAdb-2bcosAdc+2bcsinA dA d/p d 式中的d 为微分符号所以dAd/p d=ac/b cc csinA c da-(b cc ccosAc)/(b cc csinAc)db-c c-bcosA c/b cc c sinAcdc(9)因为a/bcsinA c=1/h a (h a 为a 边上的高)b-ccosAc/bcsinAc=acosC c/bcsinA c=cosCc/h a c-bcosAc/bcsinAc=acosB c/bcsinAc=cosB c/h a(10)用改正数代替式(9)中的微分元素,并将式(10)代入,得u A 计算=p d/h A u A -p dcosC c/h A u b-p dcosB c/h A u c(11)因此,条件方程式(11)的最后公式为:P d/h 2u a -p dcosC c/h A u b -p dcosB c/h a u C-u A 观测+w=0(12)式中角B c 和角C c 可按正弦公式求得,即SinB c=sinA c/a cb c SinCc=sinA c/a cc c2测边测角三角网中条件的个数测边测角自由三角网中,条件方程式的总数可按下式确定:r=N+S-2n+3式中:n 为网中三角点的个数;N 为观测角度的个数;S为观测边长的条数。
第3讲(三角网条件平差
第三章 条件平差
第四节
二、条件方程的列立 条件方程的种类:图形条件(内角和条件)、水平条件(圆周条件)、极条件、 条件方程的种类:图形条件(内角和条件)、水平条件(圆周条件)、极条件、 )、水平条件 )、极条件 方位角条件、边长条件、坐标条件。 方位角条件、边长条件、坐标条件。 1. 图形条件(n=15 图形条件(n=15 t=8 r=7 哪7个?) 每个三角形内角平差值和等于180 每个三角形内角平差值和等于180
sin L1 sin L4 sin L7 sin L10 sin L13 sin L1 sin L4 sin L7 sin L10 sin L13 v v cot L1 1 − cot L2 2 sin L2 sin L5 sin L8 sin L11 sin L14 ρ ′′ sin L2 sin L5 sin L8 sin L11 sin L14 ρ ′′
第三章 条件平差
第四节
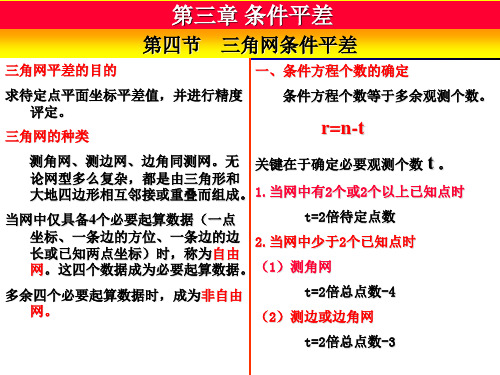
三角网平差的目的 求待定点平面坐标平差值, 求待定点平面坐标平差值,并进行精度 评定。 评定。 三角网件方程个数等于多余观测个数。 条件方程个数等于多余观测个数。
r=nr=n-t
测角网、测边网、边角同测网。无 关键在于确定必要观测个数 t 。 测角网、测边网、边角同测网。 论网型多么复杂, 论网型多么复杂,都是由三角形和 大地四边形相互邻接或重叠而组成。 当网中有2个或2 大地四边形相互邻接或重叠而组成。 1.当网中有2个或2个以上已知点时 t=2 t=2倍待定点数 当网中仅具备4个必要起算数据( 当网中仅具备4个必要起算数据(一点 坐标、一条边的方位、 坐标、一条边的方位、一条边的边 2.当网中少于2个已知点时 当网中少于2 长或已知两点坐标) 称为自由 长或已知两点坐标)时,称为自由 这四个数据成为必要起算数据。 网。这四个数据成为必要起算数据。 (1)测角网 t=2倍总点数t=2倍总点数-4 多余四个必要起算数据时,成为非自由 多余四个必要起算数据时,成为非自由 网。 (2)测边或边角网 t=2倍总点数t=2倍总点数-3
条件平差
得法方程: AQATK-W=0 T 1 T N AQA AP A 令 aa r .r r .nn.nn.r 则有: NaaK-W=0
法方程系数阵Naa是一个r阶的满秩方阵,且可逆
N11k1 N12k 2 N1r k r W1 0 N 21k1 N 22k 2 N 2 r k r W2 0 N r1k1 N r 2 k 2 N rn k r Wr 0
目标函数:f x min n1 x a h x min F a , x f 1k 约束条件: h x 0 k 1 n1 F a, x
0 a F a, x 0 x
L2
L4 L1 L3 L2
A
B
C
§6-2 条件方程
条件方程的个数等于多余观测数r。条件方程之间 不能线性相关,在一个平差问题中,条件方程的个 数是固定不变的.
一、r的确定: r=n-t 二、条件方程的列立: 原则:足数(r个),线性无关,形式简单,易 于列立
控制网常见几何模型
水准网 三角网(测角网) 三边网(测边网) GPS基线向量网 单一附合导线
由此可得联系数K的解:
r ,1
K ( AQA ) W
T
T 1
V QA K
条件平差的 最小二乘解:
n,1
ˆ L V L
三、条件平差计算步骤:
1.根据平差问题的具体情况,列出条件方程,条 件方程的个数等于多余观测数r。 2.组成法方程式,法方程的个数等于多余观测数r 3.解法方程,求出联系数K值。 4.将K代入改正数方程式,求出V值,并求出观测 值的平差值=L+V。 5.检验平差计算的正确性(可用平差值重新列出 平差值条件方程式,看其是否满足方程)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
§3-4 三角网条件平差计算2学时三角网测量的目的,是通过观测三角形的各角度或边长,计算三角网中各未知点的坐标、边的长度及方位角等。
三角网按条件平差计算时,首要的问题是列出条件方程。
因此了解三角网的构成,总结其条件方程的种类及各种条件方程的组成规律是十分重要的。
三角网的种类比较多,网的布设形式也比较复杂。
根据观测内容的不同,有测角网、测边网、边角同测网等;根据网中起始数据的多少,有自由三角网和非自由三角网。
自由三角网是指仅具有必要起算数据的三角网,网中没有多余的已知数据。
如果测角三角网中,只有两个已知点(或者已知一个已知点的坐标、一条已知边的长度和一个已知的方位角),根据数学理论,以这两个已知点为起算数据,再结合必要的角度测量值,就能够解算出网中所有未知点的坐标。
如果三角网中除了必要的起算数据外还有其它的已知数据,或者说已知数据有冗余,就会增加对网形的约束,从而增强其可靠性,这种三角网称之为非自由三角网。
无论多么复杂的三角网,都是由单三角形、大地四边形和中点多边形组合而成的。
在本节,我们先讨论三角网条件平差中条件方程个数的确定问题,然后主要讨论测角三角网的条件方程的形式问题。
一、网中条件方程的个数三角网平差的目的,是要确定三角点在平面坐标系中的坐标最或然值。
如图3-9所示,根据前面学到的测量基础知识,我们知道,必须事先知道三角网中的四个数据,如两个三角点的4个坐标值,或者一个三角点的2个坐标值、一条边的长度和一个方位角,这4个已知数据我们称之为三角网的必要起算数据。
有了必要起算数据,就可以确定三角网在平面坐标系中的位置、网的大小及其方位,就可以计算三角网中未知点的坐标。
要对三角网进行平差计算,还必须先知道网中的总观测数n、判定必要观测数t,从而确定了多余观测数:r = n - t由条件平差原理知,多余观测数与条件方程数是相等的,有了多余观测数,也就确定出了条件方程的个数。
因此,问题的关键是判定必要观测数t。
1.网中有2个或2个以上已知点的情况三角网中有2个或2 个以上已知三角点,就一定具备了4个必要起算数据。
无论是测角网、测边网还是边角同测网,如果有2个已知点相邻,要确定一个未知点的坐标,需要观测两个观测值(2个角,或者1条边和1个角,或者2条边)。
也就是说,确定1个未知点要有2个必要观测值;那么如果网中有p个未知点,必要观测数应等于未知点个数的两倍。
t = 2 ·p(3-4-1)(1) 测角网图3-9所示,三角网中有2个已知点,待定点个数为p =6。
如果三角网中观测量全部是角度时。
总观测值个数:n = 23必要观测数:t = 2 · p =12则多余观测数,即条件平差条件方程个数:r = n – t = 11(2) 测边网在图3-9中,如果三角网中观测量全部是边的长度时:总观测值个数:n = 14必要观测数:t = 2 · p =12则多余观测数,即条件平差条件方程个数:r = n – t = 2(3) 边角同测网在图3-9中,如果三角网中的所有的角度值和所有的边长值都进行观测时:总观测值个数:n = 37必要观测数:t = 2 · p =12则多余观测数,即条件平差条件方程个数:r = n – t = 252. 网中已知点少于2个的情况有些情况下,三角网中已知点可能少于2个,只有1个已知点、1个已知边和1个已知方位角,或者没有已知点和已知方位角只有1个已知边。
但是,不管怎样说,1条已知边是必须已知的,或者需要进行观测的。
如果没有已知点,可以假定网中的1个未知点;如果没有已知方位角,可以取网中的1个方向的方位角为某一假定值。
这样也就间接地等价于网中有2个相邻点的坐标是已知的。
(1) 测角网三角网中共有p个三角点、1个已知方位角(也可以没有)、1个已知点(也可以没有已知点)和1个已知边长S(或者也是观测得到的),并观测了所有的角度。
如果已知点和已知方位角都没有,就要进行必要的假设。
则在进行条件平差时,必要观测数为:t = 2 · ( p – 2) (3-4-2) 如图3-10所示,三角网中观测了所有角度值(如果没有已知边时,也观测1条边长作为起算数据)。
网中三角点个数:p = 6角度观测值个数:n = 12必要观测数:t = 2 · ( p – 2) = 8则多余观测数,即条件平差条件方程个数:r = n – t = 4(2) 测边网或边角同测网若三角网中,共有p个三角点和1个已知点(或者也是假定的),并对所有的边长,或者角度和边长进行了观测,观测值总个数为n。
在进行条件平差时,由于要加上必须的起算边长,则必要观测(边或者边和角)的个数为t = 2 · ( p – 2)+1 (3-4-3) 如图3-10所示,网中三角点个数:p = 6如果是测边网,则总观测值个数: n = 9必要观测数: t = 2 · ( p – 2) +1=9多余观测数,即条件平差条件方程个数: r = n – t = 0如果是边角同测网,则总观测值个数: n = 21必要观测数: t = 2 · ( p – 2) +1=9多余观测数,即条件平差条件方程个数: r = n – t = 12以上我们仅对几种三角网,讨论了条件平差时必要观测数及多余观测数和条件平差方程数的确定方法,还有很多情况没有涉及到。
在实际平差计算中,应针对不同情况进行具体分析。
二、条件方程的形式三角网中的条件方程主要有以下几种形式:1. 图形条件方程图形条件,又叫三角形内角和条件,或三角形闭合差条件。
在三角网中,一般对三角形的每个内角都进行了观测。
根据平面几何知识,三角形的三个内角的平差值的和应为180˚,如图3-12中的三角形ABP ,其内角平差值的和应满足下述关系:0180ˆˆˆ321=-++ L L L (3-4-4)此即为三角形内角和条件方程。
由于三角形是组成三角网的最基本的几何图形,因此,通常称三角形内角和条件为图形条件。
因此图形条件也是三角网的最基本、最常见的条件方程形式。
与(3-4-4)式相对应的改正数条件方程为0321=-++w v v v (3-4-5))180(321 -++-=L L L w(3-4-6) 2. 水平条件方程水平条件,又称圆周条件,这种条件方程一般见于中点多边形中。
如图3-12所示,在中点P 上设观测站时,周围的五个角度都要观测。
这五个观测值的平差值之和应等于360˚,即0360ˆˆˆˆˆ1512963=-++++ L L L L L (3-4-7)相应的改正数条件方程为 01512963=-++++w v v v v v (3-4-8))360(1512963 -++++-=L L L L L w(3-4-9)3. 极条件方程极条件是一种边长条件,一般见于中点多边形和大地四边形中。
先看中点多边形的情况。
如图3-12所示,中心P 点为顶点,有五条边,从其中任一条边开始依次推算其它各边的长度,最后又回到起始边,则起始边长度的平差值应与推算值的长度相等。
在图3-12所示的三角网中,我们应用正弦定理,以BP 边为起算边,依次推算AP 、EP 、DP 、CP ,最后回到起算边BP 、,得到下式14131110875421ˆsin ˆsin ˆsin ˆsin ˆsin ˆsin ˆsin ˆsin ˆsin ˆsin ˆˆL L L L L L L L L L S S BP BP ⋅⋅⋅⋅= 整理得0ˆ1ˆsin ˆsin ˆsin ˆsin ˆsin ˆsin ˆsin ˆsin ˆsin ˆsin 14118521310741=-L L L L L L L L L L (3-4-10)(3-4-10)式即为平差值的极条件方程。
为得到其改正数条件方程形式,可用泰勒级数对上式左边展开并取至一次项:1sin sin sin sin sin sin sin sin sin sin 1sin ˆsin ˆsin ˆsin ˆsin ˆsin ˆsin ˆsin ˆsin ˆsin 1411852131074114118521310741-=-L L L L L L L L L L L L L L L L L L L L ρρ''-''+22141185213107411114118521310741cot sin sin sin sin sin sin sin sin sin sin cot sin sin sin sin sin sin sin sin sin sin v L L L L L L L L L L L v L L L L L L L L L L L ρρ''-''+55141185213107414414118521310741cot sin sin sin sin sin sin sin sin sin sin cot sin sin sin sin sin sin sin sin sin sin v L L L L L L L L L L L v L L L L L L L L L L L ρρ''-''+88141185213107417714118521310741cot sin sin sin sin sin sin sin sin sin sin cot sin sin sin sin sin sin sin sin sin sin v L L L L L L L L L L L v L L L L L L L L L L L ρρ''-''+111114118521310741101014118521310741cot sin sin sin sin sin sin sin sin sin sin cot sin sin sin sin sin sin sin sin sin sin v L L L L L L L L L L L v L L L L L L L L L L L 0cot sin sin sin sin sin sin sin sin sin sin cot sin sin sin sin sin sin sin sin sin sin 141414118521310741131314118521310741=''-''+ρρv L L L L L L L L L L L v L L L L L L L L L L L化简,即得极条件的改正数条件方程:0 1414131311111010887755442211=--+-+-+-+-w v ctgL v ctgL v ctgL v ctgL v ctgL v ctgL v ctgL v ctgL v ctgL v ctgL (3-4-11)⎪⎪⎭⎫ ⎝⎛-''-=13107411411852sin sin sin sin sin sin sin sin sin sin 1L L L L L L L L L L w ρ(3-4-12)在大地四边形中的极条件方程与中点多边形稍有不同。