轮机自动化对比题
轮机自动化复习(54期)

第一章练习题1.在运行参数的自动控制系统中,控制对象的输出量是()。
A.给定值的变化量B.负荷的改变C.被控量的变化量D.调节阀开度的变化量2.调节器的输入量与输出量分别为()。
A.给定值,测量值B.给定值,显示值C.测量值,调节阀开度D.偏差值,调节阀开度3.在柴油机气缸冷却水温度自动控制系统中,淡水冷却器的输入量和输出量分别是()。
A.冷却水温度的给定值,测量值B.水温的偏差值,测量值C.三通调节阀的开度,柴油机进口水温D.柴油机出口水温,三通调节阀开度4.在锅炉水位自动控制系统中,在额定负荷情况下,调节器的输出应使调节阀的开度为()。
A.全开B.全关C.全开的一半D.不定5.在反馈控制系统稳定运行期间,其调节阀的开度为()。
A.全开B.全关C.全开的一半D.不定6.在反馈控制系统中,能克服外部扰动的控制系统是属于()。
A.定值控制系统B.程序控制系统C.随动控制系统D.开环控制系统7.给定值是时间函数的自动控制系统属于()。
A.定值系统B.函数系统C.随动系统D.程序系统8.在主机驾驶台遥控装置中,柴油机增减负荷的转速控制系统是()。
A.定值控制系统B.随动控制系统C.程序控制系统D.开环控制系统9.在机舱的常用控制系统中,属于定值控制系统的是()。
①锅炉水位;②锅炉点火;③分油机排渣;④柴油机转速;⑤燃油黏度;⑥自动操舵仪。
A.①④⑤B.①④⑥C.②③⑤D.②⑤⑥10.有一定值控制系统受到扰动后,其被控量的变化规律是非周期过程,这说明()。
A.控制对象惯性太大B.调节器控制作用太弱C.调节器控制太强D.扰动太猛烈11.在定值控制系统中,受到扰动后,若第一个波峰值很大,这说明()。
A.控制对象惯性太大B.控制对象放大系数太小C.调节器控制作用太强D.调节器控制作用太弱12.在改变给定值的控制系统中,改变给定值后,其动态过程超调量偏大,应采取的措施是()。
A.增大调节器的比例带B.减少调节器的比例带C.减少给定值的变化量D.减少控制对象的放大系数K13.在系统过渡过程曲线上,第一个波峰到第二个波峰之间的时间,称为()。
10级诚毅学院《轮机自动化》复习

1.在大型柴油机油轮机舱的常用控制系统中,属于反馈控制系统的有:①辅锅炉的水位②辅锅炉的点火③主机转速④主机的换向与制动⑤分油机的自动排渣⑥气缸冷却水温度A.①④⑤B.②③⑥C.②④⑤D.①③⑥2.在改变给定值的控制系统中,若超调量σP = 0,则系统的动态过程为:A.非周期过程B.衰减振荡过程C.等幅振荡过程D.发散振荡过程3.有一台调节器,其输出不仅与偏差大小有关,还与偏差存在的时间有关,这是一台:A.比例调节器B. PI调节器C. PD调节器D.位式调节器4.在采用浮子式锅炉水位控制系统中,水位不可控制的超过最高水位,其可能的原因是:①气源中断②电源中断③调节板的上面锁钉脱落④调节板上的下面销钉脱落⑤浮球破裂⑥在下限水位时,枢轴卡阻A.①③⑤B.①②⑤C.②④⑥D.③⑤⑥5.当输入为阶跃信号时,调节器输出以恒定不变的速率变化,这是:A.双位作用规律B.比例作用规律C.积分作用规律D.微分作用规律6.在采用PD调节器组成的控制系统受到扰动后,其动态过程的衰减比为2:1,你应:A.调小PB,调小T dB.调大PB,调小T dC.调小PB,调大T dD.调大PB,调大T d7.在用临界比例带法整定调节器参数时,该整定法不适用的场合为:A.没有控制对象的特性参数B.振荡周期太短C.临界比例带PB K太小D.临界比例带PB K太大8.主机缸套冷却水系统采用PI控制方式,设定温度为68℃,主机运转稳定后,温度表指针一直升到82℃才缓慢回摆到72℃稳定下来,此时应:A.PB↑B.PB↓C. T i↓D. B+C9.在大型油船辅锅炉燃烧控制系统中,应包括:①供油量控制回路②供风量控制回路③最佳风油比控制回路④双冲量控制回路⑤给水差压控制回路⑥水位控制回路A.②③④B.①②③C.④⑤⑥D.③④⑤10.空气反冲洗自清洗滤器控制回路中,压力开关ΔP2的作用是:A.控制冲洗开始时间B.控制冲洗结束C.冲洗期间不许电机转动D.进出口压差过大报警11、在空气反冲式自清洗滤器的控制系统中,当滑油滤器进出口滑油压差超过0.09MPa时,电磁阀S1和控制活塞的状态是:A. S1通电,控制活塞被抬起B. S1通电,控制活塞被压下C. S1断电,控制活塞被压下D. S1断电,控制活塞被抬起11.活塞环检测传感器,当测到主机活塞环断折缺损时,输出:A.正向方波脉冲B.正向尖脉冲C.负向方波脉冲D.负向尖脉冲12.在电阻式压力传感器中,当输入的压力信号增大时,滑针在变阻器上的滑动方向为______,测量电桥输出的电压值变化为______。
轮机自动化习题精简版
第一章自动控制系统(一) 单项选择题1. 在MR-Ⅱ型电动冷却水温度控制系统中,淡水冷却器的输入与输出量分别是A.三通调节阀开度,冷却水进口温度B.冷却水出口温度,冷却水进口温度C.冷却水出口温度,三通调节阀开度D.冷却水进口温度,三通调节阀开度2. 在MR-Ⅱ型电动冷却水温度控制系统中,限位开关的作用是A.防止电机连续转动B.防止电机因短路等故障烧坏C.防止三通调节阀卡在极限位置D.防止“增加”和“减少”输出继电器同时通电3. 在MR-Ⅱ型电动冷却水温度控制系统中,在“增加”和“减少"输出继电器的通电回路中,各串接一个中间继电器的常闭触头的作用是A.“增加”或“减少”输出继电器通电自保B.防止“增加”和“减少”输出继电器同时通电C.防止“增加”和“减少”继电器连续通电D.防止三通调节阀卡在极限位置4. 在MR-Ⅱ型电动冷却水温度控制系统中,热保护继电器的作用是A.防止三通调节阀卡在极限位置B.防止“增加"和“减少”输出继电器同时通电C.防止电机M过载烧坏D.防止冷却水温度超过上限值5. 在MR-Ⅱ型电动冷却水温度控制系统中,其调节器可实现A.双位控制作用B.比例控制作用C.P I控制作用D.PD控制作用6. 在MR-Ⅱ型电动冷却水温度控制系统中,所采用的测温部件及特性是A.金属电阻,随温度升高电阻增大B.金属电阻,随温度升高电阻减小C.热敏电阻,随温度升高电阻增大D.热敏电阻,随温度升高电阻减小7. 在MR-Ⅱ型电动冷却水温度控制系统中,比例微分控制电路的输入量是,其输出信号送至A.给定值,执行电机M B.偏差值,脉冲宽度调制器C.测量值,“增加”、“减少"输出继电器D.偏差值,执行电机M8. 在MR-Ⅱ型电动冷却水温度控制系统中,当柴油机负荷降低时,其冷却水出口温度会A.保持给定值不变B.绕给定值振荡C.增高D.降低9. 在MR-Ⅱ型电动冷却水温度控制系统中,当T802分压点A碰地时,MRB板上的T1集电极电流及实际水温的变化是A.增大,降低B.减小,降低C.增大,增大D.减小,增大10. 在MR-Ⅱ型电动冷却水温度控制系统中,若热敏电阻T802开路,则温度表指示值及三通调节阀的旁通阀状态为A.100℃以上,全关B.100℃以上,全开C.0℃以下,全关D.0℃以下,全开11. 在MR-Ⅱ型电动冷却水温度控制系统中,若热敏电阻分压点A对地短路,则温度表的指示值,三通调节阀的旁通阀状态为A.100℃以上,全关B.100℃以上,全开C.0℃以下,全关D.0℃以下,全开12. 在MR-Ⅱ型电动冷却水温度控制系统中,随着冷却水实际温度的变化,导致测温元件_______的变化A.交流电流B.直流电流C.电容D.电阻13. 在MR-Ⅱ型电动冷却水温度控制系统中,改变冷却水温度的给定值是通过_______改变来实现A.设定的电压值B.设定的电容值C.设定的电阻值D.设定的电流值14. 在MR-Ⅱ型电动冷却水温度控制系统中,冷却水温度的偏差值是通过_______得到的A.电压比较器B.反相输入比例运算器C.差动输入比例运算器D.同相输入比例运算器15. 在对MR-Ⅱ型控制系统MRV板进行测试时,给它加一个阶跃的输入信号,其输出的变化规律为A.成比例输出B.先有很大阶跃输出,后其输出逐渐消失在比例输出上C.先有一个比例输出,其后输出逐渐增大D.比例惯性输出16. 在MR-Ⅱ型电动冷却水温度控制系统中,稳态时静态偏差太大,其原因是A.脉冲宽度太窄B.不灵敏区太大C.微分时间太短D.比例带太小17. 在MR-Ⅱ型电动冷却水温度控制系统中,若水温低于给定值,偏差较大,且偏差变化很快,则A.增加输出继电器连续通电B.增加输出继电器断续通电C.减少输出继电器连续通电D.减少输出继电器断续通电18. 在MR-Ⅱ型电动冷却水温度控制系统中,MRK板上的开关SW1是A.手动-自动转换开关B.手操开关C.电源主开关D.内外给定转换开关19. 在MR-Ⅱ型电动冷却水温度控制系统中,若把MRD板上用于电容充放的电位器电阻1值调小,则系统A.脉冲宽度变窄,电机转动时间短,控制作用弱,稳定性↓B.脉冲宽度变窄,电机停止时间短,控制作用强,稳定性↓C.脉冲宽度变宽,电机转动时间长,控制作用强,稳定性↓D.脉冲宽度变宽,电机停止时间长,控制作用弱,稳定性↑20. 在MR-型电动冷却水温度控制系统中,自动控制投入工作后,水温出现很大偏差时,电机M不转动(指示灯不亮),这时你首先要做的工作是A.更换保险丝F1和F2B.更换“增加”和“减少”输出继电器C.检测MRD板功能是否正常D.立即改为手动21. 在MR-Ⅱ型电动冷却水温度控制系统中,若冷却水温度低于给定值,而执行电机不可控地朝开大通冷却器的管口方向转动,其原因可能是A.T802热敏电阻分压点A碰地B.MRD板上TU1反相端断路C.MRD板上TU2反相端断路D.增加输出继电线圈断路22. 在MR-Ⅱ型电动冷却水温度控制系统中,出现指示温度极低、三通阀中旁通阀全开的现象,其可能的原因是A.MRD板上的TU1反相输入端断路B.T802热敏电阻对地断路C.MRD板上的充放电电阻断路D.MRB板输出端U15对地短路23. 在燃油粘度控制系统中一般均采用A.正作用式调节器,配合气开式调节阀B.正作用式调节器,配合气关式调节阀C.反作用式调节器,配合气开式调节阀D.反作用式调节器,配合气关式调节阀24. 在燃油粘度控制系统中,错误地把正、反作用切换装置转换成正作用式,则控制系统将成为,蒸汽调节阀开度为A.负反馈系统,绕原开度振荡B.正反馈系统,绕原开度振荡C.负反馈系统,全开或全关D.正反馈系统,全开或全关25. 在气动燃油粘度控制系统中,测粘计输出_______信号,反应粘度的大小A.电压信号B.压差信号C.电流信号D.电阻变化信号26. 在燃油粘度控制系统中,其控制对象和执行机构分别为A.燃油加热器,蒸汽调节阀B.柴油机主机,燃油泵C.燃油加热器,燃油泵D.柴油机主机,蒸汽调节阀27. 在燃油粘度控制系统中,以燃油粘度为被控量,而不用温度为被控量的原因是A.蒸汽调节阀需要粘度信号控制B.温度相同,不同品种燃油粘度不同C.温度传感器精度太低D.温度传感器结构太复杂28. 在VAF型燃油粘度控制系统中,测粘计输出信号为A.0.02~0.1MPa气压信号与燃油温度成比例B.0.02~0。
轮机自动化复习

轮机自动化复习题1.在反馈控制系统中,为了达到消除静态偏差的目的,必须选用。
A.正反馈B.负反馈C.在偏差大时用正反馈D.在偏差值小时用负反馈2. 一个控制系统比较理想的动态过程应该是____。
A.衰减振荡B.等幅振荡C.发散振荡D.非周期过程3.气动控制系统中,仪表之间的统一标准气压信号是。
A.0.02~0.1MPa B.0.2~1.0MPa C.0.02~0.14MPa D.0.2~1.4MPa4.在定值控制系统中,其控制作用是。
A.给定值随工况变化,被控量也跟着变化B.给定值不变,被控量也始终不变C.被控量能尽快地恢复到给定值附近D.给定值在一定范围变动,被控量在较小范围内变化5 在柴油机冷却水温度控制系统中,其控制对象是________。
A.淡水泵B.柴油机C.淡水冷却器D.三通调节阀6.用来描述自动控制系统准确性的两项指标是。
A.衰减率和静差B.超调量和静差C.最大动态偏差和静差D.超调量和过渡过程时间7.采用比例调节器的定值控制系统,当比例带减小时,对控制过程和结果的影响是。
A.衰减率减小B.静态偏差增大C.最大动态偏差增大D.振荡次数减少8 在以下系统中,属于开环控制系统的是________。
A.主机遥控换向逻辑回路B.燃油粘度自动控制系统C.主机冷却水温度自动控制系统D.船舶自动舵控制系统9 在反馈控制系统中,被控量是指________。
A.设定值B.调节器的输出C.被控对象的输入D.被控对象的输出10 一个环节的输入量变化取决于________。
A.上一环节的输出B.反馈量C.环节特性D.A+C11 在反馈控制系统中,若执行机构发生故障而卡死在某一位置,这时被控量将________。
A.保持不变B.达到最大值C.达到最小值D.不能自动控制12 在采用气关式调节阀调节蒸汽加热水柜水温的反馈控制系统中,若调节器发生故障而没有输出,这时被控量将________。
A.保持不变B.达到最大值C.达到最小值D.不能确定13.在定值控制系统中,其动态过程的衰减比为1:2,则动态过程为。
轮机自动化复习有答案版

1、在采用耗气型气动功率放大器时,若它能把压力信号放大10 倍,则喷嘴-挡板机构输出的压力变化围是:A、0.008MPaB、0.02MPaC、0.08MPaD、0.06MPa2、气动功率放大器是以____平衡原理工作的。
A、线位移B、力C、力矩D、角位移3、某温度变送器铭牌上标明量程为0-100℃,最大绝对误差为士1.5℃,则该温度变送器的精度为:A、3 级B、2 级C、1 级D、1.5 级4、JS-II型多回路时间继电器的标度盘复位条件是:A、继电器线圈通电B、离台器啮合C、继电器线圈断电D、收紧复位弹簧5、柴油机货船辅锅炉燃烧自动控制的方式常采用:A、微分控制B、双位控制C、积分控制D、连续控制6、在NAKAKITA型燃油粘度控制系统中,控制选择阀的作用是A、输出柴油-重油转换信号B、输出温度控制信号C、输出粘度控制信号D、输出温度和粘度控制信号的信号7、在NAKAKHA型燃油粘度控制系统中,温度调节器和粘度调节器分别采用A、正作用式、反作用式B、正作用式,正作用式C、反作用式,反作用式D、反作用式,正作用式8、在NAKAKITA型燃油粘度控制系统中,若顺时针转动粘度调节器给定值旋钮,则红色给定指针朝读数方向转动,挡板喷嘴。
A、增大,靠近B、增大,离开C、减小、靠近D、减小,离开9、在NAKAKITA型燃油粘度控制系统中进行开环测试时,若突然顺时针转动给定位旋钮,其调节器输出的规律为:10、在NAKAKITA型燃油粘度调节器中,若三通话塞阀卡在上位,系统投人工作后,会出现A、系统不能工作B、对柴油进行中间温度定值控制,发报警C、对重油进行中间温度定值控制,发报警D、对柴油进行上限温度定值控制,发报警11、在NAKAKITA型燃油粘度调节器中,系统投入运行后,从柴油切换到重油的时刻为A、把转换开关从“D”位转到“H”位时B、油温达到中间温度时C、油温达到上限温度时D、从温度控制转为粘度控制时12、在电极式锅炉水位控制系统中,给水泵电机起动时刻为A、水位在上限水位B、水位下降到中间水位C、水位下降到下限水位D、水位上升到中间水位13、在电极式锅炉水位控制系统中、若检测高水位的1号电极结满水垢,其故障现象为A、水位在高水位振荡B、水位在下限水位振荡C、锅炉满水D、锅炉失水14、在采用压力比例调节器和电动比例操作器的辅锅炉蒸汽压力控制系统中,为增大比例作用强度,应A、把测量电位器向垂直方向转动B把测量电位器向水平方向转动C、把反馈电仪器向垂直方向转动D、把反馈电位器向水平方向转动15、在大型油船辅调炉水位控制系统中,双冲量是指A、水位,给水压差B、水位,蒸汽流量C、水位,给水流量D、给水流量,蒸汽流量16、在货船辅锅炉的燃烧控制系统中,采用双位控制的目的是A、实现蒸汽压力的定值控制B、控制系统简单可靠C、能实现良好的风油比D、保证点火成功17、在货船辅锅炉燃烧时序控制系统中,到顶扫风时间后的第一个动作是A、关小风门B、点火变压器通电C、打开燃油电磁阀D、接通火焰感受器电源18、在FOPX型分油机系统中,如果净油中的水分越大,则水分传感器的电容器流过的电流_____。
轮机自动化复习题答案
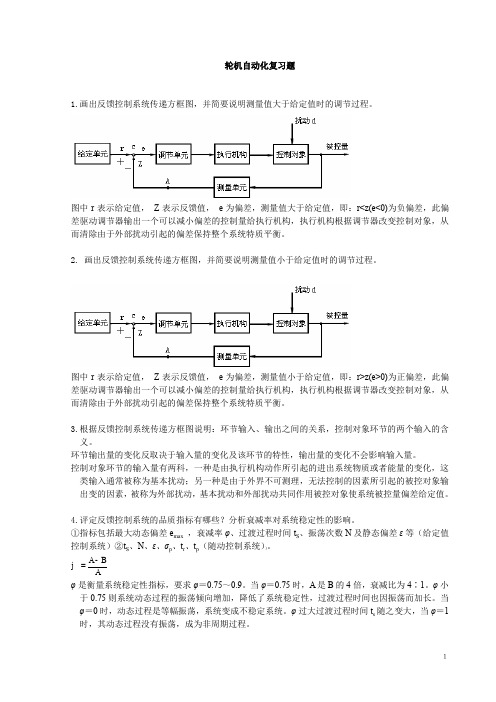
1轮机自动化复习题1.画出反馈控制系统传递方框图,并简要说明测量值大于给定值时的调节过程。
图中r 表示给定值, Z 表示反馈值, e 为偏差,测量值大于给定值,即:r<z(e<0)为负偏差,此偏差驱动调节器输出一个可以减小偏差的控制量给执行机构,执行机构根据调节器改变控制对象,从而清除由于外部扰动引起的偏差保持整个系统特质平衡。
2. 画出反馈控制系统传递方框图,并简要说明测量值小于给定值时的调节过程。
图中r 表示给定值, Z 表示反馈值, e 为偏差,测量值小于给定值,即:r>z(e>0)为正偏差,此偏差驱动调节器输出一个可以减小偏差的控制量给执行机构,执行机构根据调节器改变控制对象,从而清除由于外部扰动引起的偏差保持整个系统特质平衡。
3.根据反馈控制系统传递方框图说明:环节输入、输出之间的关系,控制对象环节的两个输入的含义。
环节输出量的变化反取决于输入量的变化及该环节的特性,输出量的变化不会影响输入量。
控制对象环节的输入量有两科,一种是由执行机构动作所引起的进出系统物质或者能量的变化,这类输入通常被称为基本扰动;另一种是由于外界不可测理,无法控制的因素所引起的被控对象输出变的因素,被称为外部扰动,基本扰动和外部扰动共同作用被控对象使系统被控量偏差给定值。
4.评定反馈控制系统的品质指标有哪些?分析衰减率对系统稳定性的影响。
①指标包括最大动态偏差e max ,衰减率φ、过渡过程时间t S 、振荡次数N 及静态偏差ε等(给定值控制系统)②t S 、N 、ε、σp 、t r 、t p (随动控制系统))。
A BAj -=φ是衡量系统稳定性指标,要求φ=0.75~0.9。
当φ=0.75时,A 是B 的4倍,衰减比为4∶1。
φ小于0.75则系统动态过程的振荡倾向增加,降低了系统稳定性,过渡过程时间也因振荡而加长。
当φ=0时,动态过程是等幅振荡,系统变成不稳定系统。
φ过大过渡过程时间t s 随之变大,当φ=1时,其动态过程没有振荡,成为非周期过程。
轮机自动化题库 - 副本讲解

第一章自动控制基础知识二、问答题:1.如图1,这是自动控制系统的原理框图,试指出各个环节的名称(即ABCD四个环节),并说明各个环节的输入和输出的信号名称。
图1 控制系统原理框图答:A:调节器 B:执行机构 C:控制对象 D:测量环节r(t):给定值 b(t):测量值 e(t):偏差 p(t):调节器输出,调节指令 q(t):调节动作 f(t):外界扰动信号 y(t):被控量2.画出自动控制系统的方框图,并简述各个组成单元的特点。
1)控制对象:被控制的机器、设备或装置。
要控制的运行参数称为被控量。
2)测量单元:测量被控量,并转换为标准信号,作为反馈信号送到调节器。
组成:传感器和变送器3)调节单元:根据偏差按一定规律输出控制量,送至执行机构。
它有两个输入,即给定值输入和测量值输入。
4)执行机构:接受调节单元送来的控制信号,改变物质或能量流量,作用于被控对象。
3.扰动的定义是什么?基本扰动和外部扰动有何区别?答:引起被控量变化的一切因素称为扰动。
显然,扰动量是控制对象的输入量。
扰动量可以分为两类:一类是轮机人员无法控制的扰动,称为外部扰动;另一类是轮机人员可以控制的扰动,称为基本扰动。
在图中,有两个信号线指向控制对象,它们分别是基本扰动(执行机构的输出)和外部扰动。
基本扰动和外部扰动区别在于是否可以控制。
4. 何为反馈?正负馈和负反馈有何区别?答:被调量的变化经测量单元反送到控制系统的输入端,这个过程称之为反馈。
反馈分为正反馈和负反馈两种。
正反馈是指经反馈后可以加强闭环系统输入效应,亦即使偏差e增加。
负反馈是指经反馈后可以减弱闭环系统输入效应,亦即使偏差e减小。
显然只有负反馈才能随时对被控量的给定值和测量值进行比较,使偏差e不断减小进而保持被控量的稳定在给定值或给定值附近。
5.简述反馈控制系统的动态过程?答:从受到扰动开始到达到新的平衡状态的过程就是动态过程,也称为过渡过程。
系统经常会受到扰动,系统的平衡状态因而会经常遭到破坏。
完整word版轮机自动化基础本科-选择题复习题
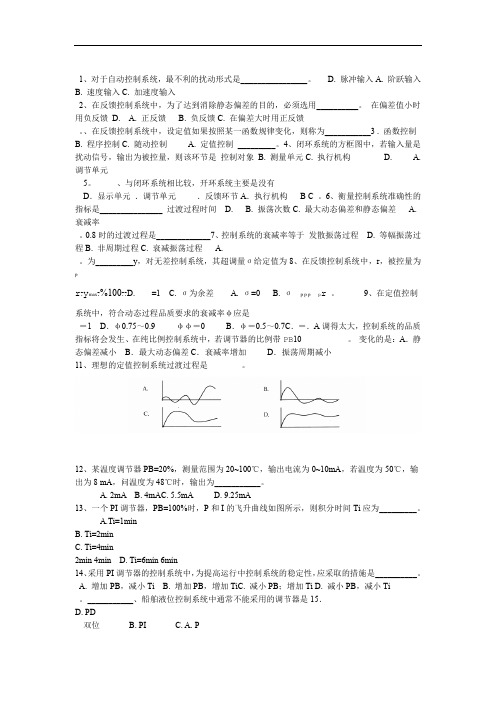
1、对于自动控制系统,最不利的扰动形式是________________。
D. 脉冲输入A. 阶跃输入B. 速度输入C. 加速度输入2、在反馈控制系统中,为了达到消除静态偏差的目的,必须选用__________。
在偏差值小时用负反馈 D. A. 正反馈 B. 负反馈C. 在偏差大时用正反馈。
、在反馈控制系统中,设定值如果按照某一函数规律变化,则称为___________3 . 函数控制B. 程序控制C. 随动控制 A. 定值控制_________。
4、闭环系统的方框图中,若输入量是扰动信号,输出为被控量,则该环节是控制对象 B. 测量单元C. 执行机构 D. A. 调节单元5。
、与闭环系统相比较,开环系统主要是没有D.显示单元.调节单元.反馈环节A.执行机构 B C 。
6、衡量控制系统准确性的指标是_______________ 过渡过程时间 D. B. 振荡次数C. 最大动态偏差和静态偏差 A. 衰减率。
0.8时的过渡过程是_____________7、控制系统的衰减率等于发散振荡过程 D. 等幅振荡过程B. 非周期过程C. 衰减振荡过程 A.。
为_________y,对无差控制系统,其超调量σ给定值为8、在反馈控制系统中,r,被控量为pr?y max?%100??D. =1 C. σ为余差 A. σ=0 B. σp p p p r。
9、在定值控制系统中,符合动态过程品质要求的衰减率φ应是=1 D.φ0.75~0.9 φφ=0 B.φ=0.5~0.7C.=.A调得太大,控制系统的品质指标将会发生、在纯比例控制系统中,若调节器的比例带PB10 。
变化的是:A.静态偏差减小B.最大动态偏差C.衰减率增加D.振荡周期减小11、理想的定值控制系统过渡过程是。
12、某温度调节器PB=20%,测量范围为20~100℃,输出电流为0~10mA,若温度为50℃,输出为8 mA,问温度为48℃时,输出为___________。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 有一斯密特电路如图5-10-6所示,当下移电位器P触头时,则()。
图5-10-6A.上限值U RH升高,回差增大B.上限值降低,回差不变C.上限值U RH升高,回差减小D.下限值升高,回差减小B2 有一斯密特电路如图5-10-6所示,当把电位器P的触头上移时,则()。
图5-10-6A.提高了发火转速B.降低了发火转速C.回差增大D.回差减小A3有一斯密特电路如图5-10-6所示,若反馈电阻RF烧坏,现调换一个电阻值比原来小的电阻,则可能出现的现象是()。
图5-10-6A.两次起动时间间隔加长B.两次起动时时间隔缩短C.提高了发火转速D.降低了发火转速A4 AUTOCHIEF-Ⅲ型主机遥控的速度限制回路如图5-10-8所示,当U i1>U i2时,运算放大器A1、A2的功能是()。
图5-10-8A.电压跟随器,电压跟随器B.电压比较器,电压跟随器C.电压比较器,电压比较器D.电压跟随器,电压比较器D5 在AUTOCHIEF-Ⅲ型主机遥控系统的程序负荷回路中,程序计数器PE、U/D、0C 端状态为0 0 1时,表明主机()。
A.在港内全速以下加速B.在港内全速以下减速C.从港内全速向海上全速加速D.从海上全速向港内全速减速C6 23 在AUTOCHIEF-Ⅲ型主机遥控系统的程序负荷回路中,程序计数器的PE、U/D、0C端分别为0 1 0,则主机是在()。
A.港内全速以下加减速B.对程序计数器进行预置数C.从港内全速向海上全速加速D.从海上全速向港内全速减速A7在AUTOCHIEF-Ⅲ型主机遥控系统的程序负荷回路中,程序计数器的PE、U/D、0C 端状态为0 1 1时,表明主机()。
A.从港内全速向海上全速加速过程B.从海上全速向港内全速减速过程C.已加速到海上全速D.减速到港内全速B8 在AUTOCHIEF-Ⅲ型主机遥控系统的程序负荷回路中,程序计数器的PE、U/D、C端状态为1 1 0时,表明()。
A.对程序计数是进行预置数B.程序计数器作减数计数C.程序计数器作加数计数D.已减数计数到Q8~Q1全为0A9 MAN-B&W-S-MC/MCE主机遥控系统中,集控室与驾驶室遥控在气路上的逻辑关系是()。
A.非B.与C.或D.都不是C10 MAN-B&W-S-MC/MCE主机操纵系统中,集控室与机旁控制主机在气路上的逻辑关系是()。
A.非B.与C.与非D.或D11 在Hagenuk电/液伺服器中,力线圈的工作电流为4~20mA,当力线圈输入电流为4mA时,主机运行很不稳定甚至导致停车,其调整方法是()。
A.扭紧反馈弹簧B.扭松反馈弹簧C.扭松调零弹簧D.扭紧调零弹簧D12 Hagenuk电/液伺服器,当输入电流为0时,油门处于零开度,当输入电流为20mA 时,油门达不到全速开度,则应()。
A.调节调零弹簧,使其弹力减小B.增加反馈弹簧刚度C.减小反馈弹簧刚度D.增加主泵排出油压力C13 在GS8800e数字调速系统电动执行机构中,安装在伺服电机非负载端的绝对编码器的作用包括()。
A.电动执行器的编码B.电动执行器的电流C.电动执行器的电压D.电动执行器的位置D14 在GS8800e数字调速系统电动执行机构中,安装在伺服电机非负载端的绝对编码器的作用包括检测()。
A.电动执行器的角速度B.电动执行器的电流C.电动执行器的电压D.电动执行器的编码A15 在GS8800e数字调速系统电动执行机构中,电动执行器位置反馈的作用是()。
A.控制伺服电机位置B.控制伺服电机转速C.控制伺服驱动器角度D.控制伺服电机角度A16 在GS8800e数字调速系统电动执行机构中,伺服驱动器内正弦波发生器的任务是()。
A.产生以转子位置为相位的正弦波B.产生以转子位置为速度的正弦波C.控制伺服驱动器角度D.控制伺服电机角度A17 在电/气转换器中,若转速给定电压信号所转换成的气压信号P0与该P0经P/U转换器转换成的电压信号比相等时,触发器T1和T2的状态是()。
A.低电平,低电平B.低电平,高电平C.高电平,低电平D.高电平,高电平18 电动转矩限制回路如图5-7-4所示,当设定转速US高于转矩限制开始转速所对应的电压值U a时,运算放大器A1和A2的功能为()。
图5-7-4A.电压跟随器,电压跟随器B.电压比较器,电压跟随器C.比例运算器,电压跟随器D.比例运算器,电压比较器C19 电动转矩限制回路如图5-7-4所示,当设定转速US高于转矩限制开始转速U a时,该回路输出()。
图5-7-4A.与设定转速相对应的最大供油量B.设定转速U SC.开始限制转速U aD.保持U0不变A20 电动转矩限制回路如图5-7-4所示,当设定转速U S小于U a时,该回路的输出为()。
图5-7-4A.设定转速U SB.保持U0不变C.转矩限制开始转速U aD.0C的功能是()。
21 电动加速速率限制回路如图5-7-1所示,其中运算放大器A1图5-7-1A.电压比较器B.电压跟随器C.差动输入比例运算器D.同相输入比例运算器A的功能是()。
22 电动加速速率限制回路如图5-7-1所示,运放器A2图5-7-1A.电压比较器B.电压跟随器C.同相输入比例运算器D.差动输入比例运算器D23有一电动增压空气压力限油环节如图5-7-3所示,为使在某个增压空气压力下主机转速能高一些,其调整方法是()。
图5-7-3A.调整电位器P2使UKM增大B.调整电位器P2使UKM减小C.调整电位器P1使其对地电阻减小D.调整电位器P1使其对地电阻增大C24 电动增压空气压力限油环节如图5-7-3所示,在运行中按应急操纵按钮后,运算放大器A1同相和反相端电压信号及A2同相端电压信号分别为()。
图5-7-3A.10,大于100%额定负荷所对应的增压空气压力B.01,大于100%额定负荷所对应的增压空气压力C.01,起动供油量所对应的增压空气压力D.00,等于70%额定负荷所对应的增压空气压力A25 电动增压空气压力限油环节如图5-7-3所示,在运行中按下应急操纵按钮,非门G1、G2及二极管D3、D4的状态为()。
图5-7-3A.01,截止,截止B.01,截止,导通C.10,导通,导通D.11,截止,导通C26 电动增压空气压力限油环节如图5-7-3所示,调整P1、P2使其对地电阻值增大,会使增压空气限制特性()。
图5-7-3①主机最大起动油量限制值增大;②主机最大起动油量限制值减小;③增压空气的限制作用减弱;④增压空气的限制作用增强;⑤特性曲线变陡;⑥特性曲线变平坦。
A.①③⑤B.①②⑥C.①④⑥D.①④⑤D27 对于主机遥控系统的增压空气限制环节,正确的认识是()。
A.随着转速的增加,增压空气限制环节的限制值也增加B.随着增压空气压力的增加,允许的供油量限制值增加C.随着增压空气压力的增加,主机的供油量增加D.随着增压空气压力的增加,允许的供油量限制值减小B28电动转矩限制回路如图5-7-4所示,设定转速U S低于转矩限制的开始转速U a时,二极管D的状态及运算放大器A1的功能是()。
图5-7-4A.截止,电压跟随器B.导通,电压跟随器C.电压比较器D.截止,电压比较器D29 在主机遥控系统中有增压空气压力限油及最大转矩限制,它们主要起作用的转速区分别为()。
A.高转速区,高转速区B.低转速区,高转速区C.高转速区,低转速区D.低转速区,低转速区B30 在主机遥控系统中,用Y SC表示起动的准备逻辑条件,用Y SL表示起动的鉴别逻辑,当把车钟手柄从全速正车扳到倒车微速挡,且完成换向时刻,则()。
A.Y SC=0,Y SL=0B.Y SC=0,Y SL=1C.Y SC=1,Y SL=0D.Y SC=1,Y SL=1B31 在采用主、辅起动阀的慢转起动逻辑回路中,在正常起动过程中,起动控制阀VC 和慢转起动电磁阀VSL的输出状态为()。
A.0 0 B.0 1 C.1 0 D.1 1D32 电动有触点重复起动逻辑回路如图5-5-4所示,继电器T 1线圈断路,则可能出现的故障现象是( )。
图5-5-4A .主机不能起动B .主机只能进行一次起动C .主机达不到发火转速一直起动D .一直进行重复起动 C33 在采用限制主起动阀开度的慢转起动回路中,在慢转起动过程中,起动控制阀V a 和慢转起动电磁阀V SL 的输出状态为( )。
A .0 0 B .0 1C .1 0D .1 1 B34 电动有触点重复起动逻辑回路如图5-5-4所示,若检测发火转速继电器常闭触头烧蚀不能闭合,则可能出现的故障现象是( )。
图5-5-4A.主机不能起动B.只能进行一次起动C.连续进行起动直到总时间达到D.会进行第四次起动B35 重起动的应急起动指令,重复起动信号,倒车起动指令,三者的逻辑关系是()。
A.与B.或C.非D.或非B36 双座止回阀在逻辑回路中是属于()。
A.与门B.或门C.与非门D.或非门B37 在主机遥控系统使用的气动阀件中,联动阀的两个输入信号与输出信号之间的逻辑关系为()。
A.逻辑或非B.逻辑或C.逻辑与非D.逻辑与D38 在开关量报警控制单元的组成中,不包括()。
A.输入回路B.延时环节C.逻辑判断环节D.比较环节D39 在用热电偶检测温度参数时,为使测量值不受环境温度的影响,常采用冷端补偿电桥电路,当环境温度升高时,热电偶产生的热电势e的变化为(),补偿电桥输出U ab的变化为(),测量回路的输出U0为()。
A.增大,减小,增大B.减小,增大,不变C.减小,增大,减小D.增大,增大,不变B40 在用冷端温度补偿电桥的热电偶检测温度的电路中,若检测点温度和环境温度同时降低时,热电势e,补偿电桥的输出U ba及U0的变化分别为()。
A.降低,增大,降低B.降低,降低,降低C.降低,降低,不确定D.增大,增大,增大A41 热电阻式三线制测温电桥,若热电阻连接电源正端的导线断裂,则表头指针应指()。
A.最大B.最小C.中间值D.二线制精度差些A42 在采用冷端温度补偿电桥的热电偶检测温度的电路中,若环境温度不变,随着检测点温度升高,其热电势e的变化、补偿电桥输U ba的变化,及U0的变化分别为()。
A.增大,减小,增大B.增大,增大,基本不变C.增大,基本不变,增大D.减小,增大,减小C43 用磁脉冲传感器检测到主机活塞环卡在环槽时,输出()。
A.幅值较小的正向方波脉冲B.幅值较小的正向尖峰脉冲C.幅值较小的负向方波脉冲D.幅值较小的负向尖峰脉冲B44 在用磁脉冲传感器检测活塞环工作状态时,若所有活塞环工作状态正常,则传感器输出()。
A.一系列正向方波脉冲B.一系列正向尖脉冲C.稳定的直流电压信号D.稳定的直流电流信号A45。