离散LSI系统分析
1 LTI 系统分析方法评述

y(t ) 5 y(t ) 6 y(t ) f (t ) (2.3) 试求系统的全响应 y (t ) 。 解:将输入信号 f (t ) 代入 LTI 系统方程式
(2.3) ,则
[ y(t ) 3 y(t )] 2[ y(t ) 3 y(t )]
12et u (t ) 12et u (t ) [ y(t ) 3 y(t )]e2t 2[ y(t ) 3 y (t )]e 2t
结论 1: 在 t (, ) 区间上,LTI 系统的零状态响 应 y (t ) 等于输入信号 f (t ) 与系统的单位冲激响 应 h(t ) 的卷积积分,即
C1 4 0 C2 3 0
于是
C1 4 C2 3
y(t ) f (t ) h(t )
[ y(t )e ] C1et 4(e4t et )u (t )
3t
w( )e3(t )u (t )d
12(e2t et )u (t )
y (t )e3t C2 C1et (e4t 1)u (t ) 4(et 1)u (t ) [6(e2t 1) 12(et 1)]u(t )
y (t ) [et (C1 4)e2t (C2 3)e3t ]u (t ) [6et (C1 12)e2t (C2 6)e3t ]u (t ) 考 虑到系统的状态 y () y() 0 ,则
应。
h(t ) y (t ) (t ) [e2t u (t ) e3t u (t )] e2t u (t ) e3t u (t ) (3.3) 式(3.3)中, h(t ) 为 LTI 系统的单位冲激响
3.2 LTI 系统的复频域分析法
第三章 LSI系统的时域分析和信号卷积

h( k
) x(k )
-1 1 n -1
1 0 1 0 1 2 1 2
…
k
…
k
2.将 h(k) 翻转并右移 n 得到
h(n-k); 3.将 x(k) 和 h(n-k) 相乘得到
…
h(n-k), n≥0
h(n-k), n<0
0 1 2 1 -1 0 1 -1 1 n k k
这一性质表明,一方面,若干个 LSI 系统级联的系统仍是一个
LSI 系统,总系统的单位单位冲激响应等于级联的所有 LSI 系 统的单位冲激响应的逐次卷积。另一方面,任意改变 LSI 系统
级联的先后次序是无关紧要的。
2. LSI系统的卷积及性质
分配律
x(t ) [h1 (t ) h2 (t )] x(t ) h1 (t ) x(t ) h2 (t )
如果能够找到一类基本信号 ϕ(t) 或 ϕ(n),它满足: 用它们能构成相当广泛的信号; LSI系统对每个 ϕ(t) 或 ϕ(n) 的响应十分简单。 则系统对任意输入信号的响应将会具有一个简单的表达式。 单位冲激信号 δ(t) 或 δ(n)、复正弦信号 ejΩt 或 ejωt、复指数信号 est 和 zn 同时具有上述两个性质。 如果 ϕ(n) 为单位冲激信号,即为时域分析方法。
x(n) B
n
h( n )
kh(k ) x(n k ) h(k ) x(n k ) B h(k )
k
3. 卷积的收敛和周期卷积
-T
0
T
t
2. LSI系统的卷积及性质
数字信号处理 实验作业:离散LSI系统的时域分析

实验2 离散LSI 系统的时域分析一、.实验目的:1、加深对离散系统的差分方程、单位脉冲响应、单位阶跃响应和卷积分析方法的理解。
2、初步了解用MA TLAB 语言进行离散时间系统时域分析的基本方法。
3、掌握求解离散时间系统的单位脉冲响应、单位阶跃响应、线性卷积以及差分方程的程序的编写方法,了解常用子函数的调用格式。
二、实验原理:1、离散LSI 系统的响应与激励由离散时间系统的时域分析方法可知,一个离散LSI 系统的响应与激励可以用如下框图表示:其输入、输出关系可用以下差分方程描述:[][]NMkk k k ay n k b x n m ==-=-∑∑2、用函数impz 和dstep 求解离散系统的单位脉冲响应和单位阶跃响应。
例2-1 已知描述某因果系统的差分方程为6y(n)+2y(n-2)=x(n)+3x(n-1)+3x(n-2)+x(n-3) 满足初始条件y(-1)=0,x(-1)=0,求系统的单位脉冲响应和单位阶跃响应。
解: 将y(n)项的系数a 0进行归一化,得到y(n)+1/3y(n-2)=1/6x(n)+1/2x(n-1)+1/2x(n-2)+1/6x(n-3)分析上式可知,这是一个3阶系统,列出其b k 和a k 系数: a 0=1, a ,1=0, a ,2=1/3, a ,3=0 b 0=1/6,b ,1=1/2, b ,2=1/2, b ,3=1/6程序清单如下: a=[1,0,1/3,0]; b=[1/6,1/2,1/2,1/6]; N=32; n=0:N-1; hn=impz(b,a,n); gn=dstep(b,a,n);subplot(1,2,1);stem(n,hn,'k');课程名称 数字信号处理 实验成绩 指导教师 ***实 验 报 告院系 班级学号 姓名 日期title('系统的单位序列响应'); ylabel('h(n)');xlabel('n');axis([0,N,1.1*min(hn),1.1*max(hn)]); subplot(1,2,2);stem(n,gn,'k'); title('系统的单位阶跃响应'); ylabel('g(n)');xlabel('n');axis([0,N,1.1*min(gn),1.1*max(gn)]); 程序运行结果如图2-1所示:102030系统的单位序列响应h (n )n1020300.20.30.40.50.60.70.80.911.11.2系统的单位阶跃响应g (n )n图2-13、用函数filtic 和filter 求解离散系统的单位序列响应和单位阶跃响应。
离散控制系统的故障分析与故障改进设计
离散控制系统的故障分析与故障改进设计离散控制系统是一种重要的自动控制系统,广泛应用于诸多领域。
然而,由于其复杂性和长期使用,故障难免会发生。
故障的发生既可能导致系统的停机,也可能导致系统工作不正常,甚至对整个系统产生不可逆的损害。
因此,对离散控制系统的故障进行分析,并设计相应的故障改进方案,对确保系统的正常运行至关重要。
一、离散控制系统的故障分析离散控制系统的故障主要包括硬件故障和软件故障两大类。
硬件故障一般指由于元件老化、电路连接不良、电源问题等导致的故障。
在进行硬件故障分析时,首先可以通过仔细检查电路连线情况和电源供应是否正常来判断故障是否来源于硬件方面。
其次,可借助工具设备如数字万用表等对元件和电路进行测试,以确定具体故障点。
最后,根据故障点来采取相应的修复措施。
软件故障一般指由于编程错误、参数配置错误等导致的故障。
在进行软件故障分析时,首先可以通过对程序进行仔细分析和调试来判断故障是否源于软件方面。
其次,根据故障表现和日志信息来分析具体的错误原因。
最后,根据错误原因进行相应的修复和改进。
二、离散控制系统的故障改进设计故障改进设计的目标是保证离散控制系统在面对故障时,能够尽快地恢复正常工作,进而减少对整个系统的影响。
首先,为了提高离散控制系统的稳定性和鲁棒性,在系统设计阶段应该注重容错性的考虑。
例如,可以使用冗余技术来应对可能发生的硬件故障,以保证系统的可靠性。
此外,还可以采用编码检测和纠错技术来应对可能发生的软件故障。
其次,针对已经发生的故障,需要进行故障分析和修复。
在硬件故障方面,可以考虑更换老化的元件、修复连接错误等。
在软件故障方面,可以通过修复程序错误、重新配置参数等方式进行修复。
重要的是,在修复故障时要保证系统的可用性和数据的完整性。
最后,为了加强离散控制系统的故障处理能力,可以引入自动故障检测和诊断技术。
这通过对系统的实时监测和故障诊断,可以及时发现故障并采取相应的措施。
此外,还可以建立故障数据库,并利用故障数据来分析和改进系统的设计。
实验:离散LSI系统的时域分析研究

实验二:离散LSI 系统地时域分析一、实验目地:1加深对离散系统地差分方程、单位脉冲响应、单位阶跃响应地理解. 2.初步了解用MATLAB 语言进行离散时间系统时域分析地基本方法.. 二、实验内容:已知描述某离散LSI 系统地差分方程为2()3(1)(2)(1)y n y n y n x n --+-=-,分别用impz 和dstep 函数、filtic 和filter 函数两种方法求解系统地单位序列响应和单位阶跃响应.用impz 和dstep 函数 程序如下:a=[1,-3/2,1/2]; b=[0,1/2,0]; N=32; n=0:N-1;hn=impz(b,a,n); gn=dstep(b,a,n);subplot(1,2,1);stem(n,hn,'k'); title('系统地单位序列响应'); ylabel('h(n)');xlabel('n');axis([0,N,1.1*min(hn),1.1*max(hn)]); subplot(1,2,2);stem(n,gn,'k'); title('系统地单位阶跃响应'); ylabel('g(n)');xlabel('n');axis([0,N,1.1*min(gn),1.1*max(gn)系统的单位序列响应h (n )n系统的单位阶跃响应g (n )nx01=0;y01=0; a=[1,-3/2,1/2]; b=[0,1/2,0]; N=32;n=0:N-1;xi=filtic(b,a,0); x1=[n==0];hn=filter(b,a,x1,xi); x2=[n>=0];gn=filter(b,a,x2,xi);subplot(1,2,1);stem(n,hn,'k'); title('系统地单位序列响应'); ylabel('h(n)');xlabel('n');axis([0,N,1.1*min(hn),1.1*max(hn)]); subplot(1,2,2);stem(n,gn,'k'); title('系统地单位阶跃响应'); ylabel('g(n)');xlabel('n');axis([0,N,1.1*min(gn),1.1*max(gn)]);系统的单位序列响应h (n )n系统的单位阶跃响应g (n )n2、编写程序描绘下列序列地卷积波形: n1=0:10;N1=length(n1); f1=[n1>=2];subplot(2,2,1);stem(n1,f1,'filled'); title('f1(n)'); n2=0:10;N2=length(n2); f2=ones(1,N2);subplot(2,2,2);stem(n2,f2,'filled'); title('f2(n)'); y=conv(f1,f2);subplot(2,1,2);stem(y,'filled');f1(n)510f2(n)051015202551015N=32;nt=1;n=-3:4*pi; f1=sin(n/2)subplot(2,2,1);stem(n,f1,'filled'); title('f1(n)'); n2=-3:4*pi; f2=0.5.^n2subplot(2,2,2);stem(n2,f2,'filled'); title('f2(n)'); y=conv(f1,f2);subplot(2,1,2);stem(y,'filled');-1-0.500.51f1(n)02468f2(n)05101520253035-20-10010203、已知某离散LSI 系统地单位序列响应为()3(3)0.5(4)0.2(5)0.7(6)0.8(7)h n n n n n n δδδδδ=-+-+-+---求输入为0.5()()nx n e u n -=时地系统响应.程序如下:n1=3:7;h(n1)=[3,0.5,0.2,0.1,-0.8];subplot(2,2,1);stem(n1,h(n1),'filled'); title('h(n1)'); n=10; n2=1:n;g(n2)=exp(-0.5*n2);subplot(2,2,2);stem(n2,g(n2),'filled'); title('g(n2)'); y=conv(h(n1),g(n2));subplot(2,1,2);stem(y,'filled'); title('y')图形为:4已知描述某离散LSI 系统地差分方程为()0.7(1)2()(2)y n y n x n x n =-+--,求输入为()(3)x n u n =-时地系统响应.程序如下:a=[1,-0.7,0]; b=[2,0,-1]; N=25;n=0:N-1; xi=filtic(b,a,0); x=[n>=3];gn=filter(b,a,x,xi); stem(n,gn,'filled'); title('ϵͳÏìÓ¦');ylabel('g(n)');xlabel('n');axis([0,N,1.1*min(gn),1.1*max(gn)]);图形为:(1)通过本次试验加深了对离散系统地差分方程、单位脉冲响应、单位阶跃响应和卷积分析方法地理解.用MATLAB编程能很简单地实现系统地卷积和响应.MA TLAB中丰富地函数库为我们编程提供很大地便利.(2)本实验学习地新函数conv是难点也是重点,它能实现对系统地卷积积分,卷积函数conv默认两个序列地序号均从n=0开始,卷积结果y对应地序列地序号也是从N=0开始地.要注意conv( )函数和各序列长度地计算,写错将会影响实验地结果.版权申明本文部分内容,包括文字、图片、以及设计等在网上搜集整理.版权为个人所有This article includes some parts, including text, pictures, and design. Copyright is personal ownership.RTCrp。
离散控制系统的故障诊断与修复设计

离散控制系统的故障诊断与修复设计离散控制系统在现代工业自动化中起着至关重要的作用。
然而,由于其复杂性和长期运行的不可避免,系统中的故障问题时有发生。
因此,故障诊断与修复设计成为了确保系统正常运行的关键。
一、故障诊断故障诊断是指通过对离散控制系统的故障进行判断和识别,以找出异常和破坏性问题的过程。
它可以帮助工程师定位故障的具体位置,并采取相应的修复措施。
以下是几种常见的故障诊断方法:1. 系统自检:离散控制系统通常具备自检功能,通过自检程序可以检测到硬件故障和部分软件故障。
在系统启动或运行过程中,系统会自行对各个组件进行诊断,并生成诊断报告。
2. 传感器数据分析:离散控制系统中的传感器是检测和获取实时数据的关键元素。
通过分析传感器的输出数据,可以判断是否存在故障。
例如,如果某个传感器输出数据始终为0或超过了正常范围,那么很可能是传感器本身存在故障。
3. 故障树分析:故障树分析是一种定量分析故障可能性的方法。
通过构建故障树模型,将各种可能的故障事件和其发生的逻辑关系绘制在一张树状图上,可以清楚地看到系统中故障事件之间的关系,并寻找到最可能导致故障的根本原因。
二、修复设计当离散控制系统出现故障时,工程师需要根据诊断结果进行相应的修复设计。
以下是几种常见的修复设计方法:1. 备件更换:当故障诊断结果表明某个硬件组件发生故障时,可以将其备件直接更换。
备件更换时需要注意与原件的兼容性,确保更换的备件具有相同的规格和性能。
2. 固件更新:软件是离散控制系统中一个重要的组成部分,当诊断结果显示软件存在缺陷或漏洞时,可以通过固件更新来修复问题。
固件更新通常由设备供应商提供,并经过严格的测试和验证。
3. 参数调整:有时候故障是由参数设置错误引起的,通过对系统参数进行调整和优化,可以修复故障。
例如,对控制算法参数进行微调,可以改善系统性能并减少故障发生的可能性。
总结:离散控制系统的故障诊断与修复设计是确保系统正常运行的重要环节。
实验4离散系统的分析报告
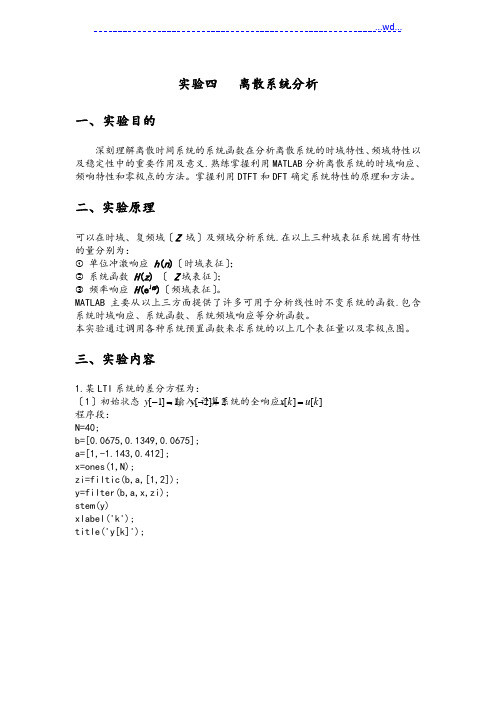
实验四 离散系统分析一、 实验目的深刻理解离散时间系统的系统函数在分析离散系统的时域特性、频域特性以及稳定性中的重要作用及意义.熟练掌握利用MATLAB 分析离散系统的时域响应、频响特性和零极点的方法。
掌握利用DTFT 和DFT 确定系统特性的原理和方法。
二、实验原理可以在时域、复频域〔Z 域〕及频域分析系统.在以上三种域表征系统固有特性的量分别为:① 单位冲激响应 h (n )〔时域表征〕;② 系统函数 H (z ) 〔 Z 域表征〕;③ 频率响应 H (e j ω)〔频域表征〕。
MATLAB 主要从以上三方面提供了许多可用于分析线性时不变系统的函数.包含系统时域响应、系统函数、系统频域响应等分析函数。
本实验通过调用各种系统预置函数来求系统的以上几个表征量以及零极点图。
三、实验内容1.某LTI 系统的差分方程为:〔1〕初始状态 .输入.计算系统的全响应。
程序段:N=40;b=[0.0675,0.1349,0.0675];a=[1,-1.143,0.412];x=ones(1,N);zi=filtic(b,a,[1,2]);y=filter(b,a,x,zi);stem(y)xlabel('k');title('y[k]');2]2[,1]1[=-=-y y ][][k u k x =结果:2〕当以下三个信号分别通过系统时.分别计算离散系统的零状态响应:程序N=30;k=0:N;b=[0.0675,0.1394,0.0675];a=[1,-1.143,0.412];x1=cos(pi*0.1.*k);x2=cos(pi*0.2*k);x3=cos(pi*0.7*k);y1=filter(b,a,x1);y2=filter(b,a,x2);y3=filter(b,a,x3);subplot(3,1,1);stem(y1)subplot(3,1,2);stem(y2)subplot(3,1,3);stem(y3):结果:〔3〕该系统具有什么特性?答:因果稳定。
关于LTS及LSI
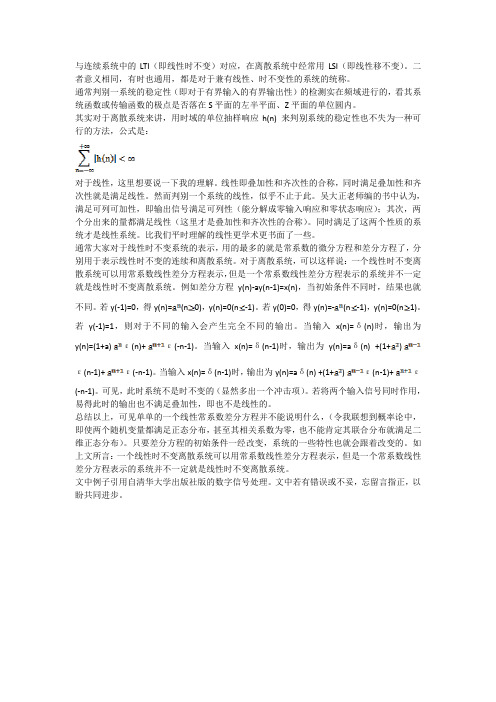
与连续系统中的LTI(即线性时不变)对应,在离散系统中经常用LSI(即线性移不变)。
二者意义相同,有时也通用,都是对于兼有线性、时不变性的系统的统称。
通常判别一系统的稳定性(即对于有界输入的有界输出性)的检测实在频域进行的,看其系统函数或传输函数的极点是否落在S平面的左半平面、Z平面的单位圆内。
其实对于离散系统来讲,用时域的单位抽样响应h(n) 来判别系统的稳定性也不失为一种可行的方法,公式是:对于线性,这里想要说一下我的理解。
线性即叠加性和齐次性的合称,同时满足叠加性和齐次性就是满足线性。
然而判别一个系统的线性,似乎不止于此。
吴大正老师编的书中认为,满足可列可加性,即输出信号满足可列性(能分解成零输入响应和零状态响应);其次,两个分出来的量都满足线性(这里才是叠加性和齐次性的合称)。
同时满足了这两个性质的系统才是线性系统。
比我们平时理解的线性更学术更书面了一些。
通常大家对于线性时不变系统的表示,用的最多的就是常系数的微分方程和差分方程了,分别用于表示线性时不变的连续和离散系统。
对于离散系统,可以这样说:一个线性时不变离散系统可以用常系数线性差分方程表示,但是一个常系数线性差分方程表示的系统并不一定就是线性时不变离散系统。
例如差分方程y(n)-ay(n-1)=x(n),当初始条件不同时,结果也就不同。
若y(-1)=0,得y(n)=(n0),y(n)=0(n-1)。
若y(0)=0,得y(n)=-(n-1),y(n)=0(n1)。
若y(-1)=1,则对于不同的输入会产生完全不同的输出。
当输入x(n)=δ(n)时,输出为y(n)=(1+a)ε(n)+ε(-n-1)。
当输入x(n)=δ(n-1)时,输出为y(n)=aδ(n) +(1+)ε(n-1)+ε(-n-1)。
当输入x(n)=δ(n-1)时,输出为y(n)=aδ(n) +(1+)ε(n-1)+ε(-n-1)。
可见,此时系统不是时不变的(显然多出一个冲击项)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
信号与系统分析实验报告实验项目名称:离散线性时不变系统分析;连续时间系统分析所属课程名称:信号与系统实验教程实验类型:验证型指导教师:实验日期:2013.06.04班级:学号:姓名:离散线性时不变系统分析一、实验目的1. 掌握离散线性时不变系统的单位序列响应、单位阶跃响应和任意激励下响应的MATLAB 求解方法。
2. 掌握离散线性时不变系统的频域分析方法;3. 掌握离散线性时不变系统的复频域分析方法;4. 掌握离散线性时不变系统的零极点分布与系统特性的关系。
二、实验原理及方法1.离散线性时不变系统的时域分析描述一个N 阶线性时不变离散时间系统的数学模型是线性常系统差分方程,N 阶线性时不变离散系统的差分方程一般形式为)()(0i n x b k n y a Mi i N k k -=-∑∑== (2.1) 也可用系统函数来表示12001212120()()()()()1MiM ii M NNkN k k b zb b z b z b z Y z b z H z X z a z a z a z a z a z----=----=++++====++++∑∑ (2.2)系统函数()H z 反映了系统响应和激励间的关系。
一旦上式中k a ,i b 的数据确定了,系统的性质也就确定了。
特别注意0a 必须进行归一化处理,即01a =。
对于复杂信号激励下的线性系统,可以将激励信号在时域中分解为单位序列或单位阶跃序列的线性叠加,把这些单元激励信号分别加于系统求其响应,然后把这些响应叠加,即可得到复杂信号作用于系统的零状态响应。
因此,求解系统的单位序列响应和单位阶跃响应尤为重要。
由图2-1可以看出一个离散LSI 系统响应与激励的关系。
()()()z X z H z =()()*()n x n h n图2-1 离散LSI 系统响应与激励的关系(1) 单位序列响应(单位响应)单位响应()h n 是指离散线性时不变系统在单位序列()n δ激励下的零状态响应,因此()h n 满足线性常系数差分方程(2.1)及零初始状态,即()()N Mkik i a h n k b n i δ==-=-∑∑, (1)(2)0h h -=-== (2.3)按照定义,它也可表示为()()()h n h n n δ=* (2.4) 对于离散线性时不变系统,若其输入信号为()x n ,单位响应为()h n ,则其零状态响应()zs y n 为()()*()zs y n x n h n = (2.5)可见,()h n 能够刻画和表征系统的固有特性,与何种激励无关。
一旦知道了系统的单位响应()h n ,就可求得系统对任何输入信号()x n 所产生的零状态响应()zsy n 。
MATLAB 提供了专门用于求离散系统冲激响应的函数impz(),其调用格式有 [h,n]=impz(b,a)求解离散系统的单位响应,其中012[,,,,]M b b b b b =,12[1,,,,]Na a a a =,[0,1,2,]n '=;[h,n]=impz(b,a,N)求解离散系统的单位响应,采样点数由N 确定,[0,1,2,,N-1]n '=;impz(b,a) :在当前窗口,用stem(n,h)绘出图形。
(2)单位阶跃响应单位阶跃响应()s n 是指离散离散时不变系统在单位阶跃序列()u n 激励下的零状态响应,它可以表示为()()()()nm s n u n h n h m =-∞=*=∑ (2.6)上式表明,离散线性时不变系统的单位阶跃响应是单位响应的累加和,系统的单位阶跃响应和系统的单位响应之间有着确定的关系,因此,单位阶跃响应也能完全刻画和表征一个线性时不变系统。
MATLAB 提供了专门用于求离散系统单位阶跃响应的函数stepz( ),其调用格式有 [s,n]=stepz(b,a) :求解离散系统的单位阶跃响应,其中012[,,,,]Mb b b b b =,12[1,,,,]N a a a a =,[0,1,2,]n '=;[s,n]=stepz(b,a,N) :求解离散系统的单位阶跃响应,采样点数由N 确定,[0,1,2,,N-1]n '=;stepz(b,a) :在当前窗口,用stem(n,s)绘出图形。
(3)任意激励下的零状态响应已经知道,离散线性时不变系统可用常系数线性差分方程(2.1)式来描述,Matlab 提供的函数dlsim( )能对上述差分方程描述的离散线性时不变系统的响应进行仿真,该函数不仅能绘制指定时间范围内的系统响应波形图,而且还能求出系统响应的数值解。
其调用格式有dlsim(b,a, x) :求解输入序列为x 的零状态响应需要特别强调的是,Matlab 总是把由分子和分母多项式表示的任何系统都当作是因果系统。
所以,利用impz (b,a),stepz(b,a),d lsim(b,a,x)函数求得的响应总是因果信号。
同时,卷积和也是线性时不变系统求解零状态响应的重要工具之一。
假设系统的输入信号为()x n ,单位响应为()h n ,则系统的零状态响应()zs y n 可由(2.5)式求解。
Matlab 提供了专门用于求离散系统卷积和的函数conv( ),其调用格式有y=conv(x,h) :求解序列x ,h 的卷积和,若序列x 的长度为n1,序列h 的长度为n2,卷积和y 的长度为n1+n2-1。
这一点需要特别注意,否则,作图时容易造成横纵坐标长度不匹配。
(4)带初始状态的任意激励下的全响应任意激励下的离散线性时不变系统的全响应为零输入响应和零状态响应之和,表示为()()()zi zs y n y n y n =+ (2.7)Matlab 提供了用于求离散系统全响应的函数filter( ),其调用格式有 y=filter( b,a,x) :求解零状态响应;y=filter( b,a,x,zi) :求解初始条件为zi 的系统的全响应,zi 向量的长度为max(length(a),length(b))-1,返回值为系统的全响应。
z = filtic(b,a,y,x):将初始状态转换为初始条件,其中[(1),(2),(3),,()]x x x x x m =----,[(1),(2),(3),,()]y y y y y n =----;z = filtic(b,a,):将初始状态转换为初始条件0x =,[(1),(2),(3),,()]y y y y y n =----2 离散线性时不变系统的复频域(Z 域)分析(1)利用Z 变换解差分方程在前面图2-1中表示了离散系统的响应与激励的关系,由图可知,系统的响应既可以用时域的方法求解,也可以用Z 域的方法求解。
当已知系统输入序列的Z 变换()X z ,系统函数()H z 时,系统响应序列的Z 变换可由()()()Y z X z H z =求出。
Matlab 提供了用于求序列Z 变换和Z 反变换的函数,其调用格式有X=ztrans(x):求无限长序列x 的Z 变换,返回Z 变换的表达式,注意这里x ,X 都是符号表达式;x=iztrans(X):求X (z )的Z 反变换x(n),返回Z 反变换的表达式,注意这里x ,X 都是符号表达式;[r,p,c]=residuez(b,a):把b(z)/a(z)展开成部分分式;[b,a]=residuez(r,p,c):根据部分分式的r 、p 、c 数组,返回有理多项式。
(2)系统的零极点分布与系统因果性和稳定性的关系因果系统的单位响应)(n h 一定满足当0<n 时,)(n h =0,那么其系统函数)(z H 的收敛域一定包含∞点,即∞点不是极点,极点分布在某个圆的圆内,收敛域是圆外区域。
系统稳定要求 ∞<∑∞-∞=n n h |)(| ,对照z 变换定义,系统稳定要求收敛域包含单位圆。
如果系统因果且稳定,收敛域包含∞点和单位圆,那么收敛域可表示为:10,||<<∞≤<r z r (2.8)MATLAB 提供了用于求系统零极点的函数,其调用格式有 roots():利用多项式求根函数来确定系统函数的零极点位置;roots(a):求极点位置,a 为系统函数)(z H 分母多项式所构成的系数向量; roots(b):求零点位置,b 为系统函数)(z H 分子多项式所构成的系数向量;zplane(b,a):绘制由行向量b 和a 构成的系统函数的零极点分布图;zplane(z,p):绘制由列向量z 确定的零点、列向量p 确定的极点构成的零极点分布图。
(3)系统的零极点分布与系统频率响应的关系 将式(2.2)因式分解,得到∏∏=-=---=Nk k Mmm z d z c A z H 1111)1()1()( (2.9) 式中,00a bA =,m c 是)(z H 的零点,k d 是其极点。
A 参数影响频率响应的幅度大小,影响系统特性的是零点m c 和极点k d 的分布。
下面采用几何方法研究系统零极点分布对系统频率特性的影响。
将式(2.9)的分子、分母同乘以M N z +,得到:∏∏∏∏==-=-=---=--=N k kMm mMN Nk kMm mdz cz Az z dz cA z H 111111)()()1()1()( (2.10)假设系统稳定,将ωj e z =代入上式,得到频率响应)](arg[11)()()()()(ωωωωωωj eH j j N k kjMm m j M N j j e e H de c e Ae e H =--=∏∏==- (2.11)设M N =,由式(2.11)得到∏∏==--=Nk kjNm m j j de c eA e H 11)()()(ωωω (2.12)在z 平面上,mj c e -ω用一根由零点m c 指向单位圆(ωj e )上任一点B 的向量c m 表示,同样kj d e -ω用一根由极点k d 指向单位圆(ωj e )上任一点B 的向量d k 来表示,c m 和Bd k 分别称为零点矢量和极点矢量,用极坐标表示为:mj m m e c B c α=,kj k k e d B d β=。
将c m 和d k 表示式代入式(2.12),得到)(1111)()()()(ωϕωωωωj j Nk kNm mNk kj Nm m j j e e H dcA de c eA e H ==--=∏∏∏∏====∏∏===N k kNm mj dcAe H 11|)(|ω(2.13)∑∑==-=Nk kNm m 11)(βαωϕ (2.14)系统或者信号的频率特性由式(2.13)和式(2.14)确定。