PWMPPMSbus与DSM接线方式解析
Pixhawk 4 开发套件 使用说明书
The most advanced development kit for the PX4 autopilotIN THE BOXPixhawk 4 autopilotGPS modulewith safety switch and LED Power boardI2C splitter6 to 6 pin cable (power) x 3 4 to 4 pin cable (CAN) x 26 to 4 pin cable (Data)10 to 10 pin cable (PWM) x 28 to 8 pin cable (AUX)PPM/SBUS out cableXSR receiver cableDSMX receiver cableSBUS receiver cableUSB CableMOUNTUse the provided foam pads to mount Pixhawk 4 as close as possible to your vehicle’s center of gravity. Make sure to orient the board with the arrow pointing forward.CONNECTConnect the PMB to the POWER port using the 6-wire cable to direct power from your lithium polymer (LiPo) battery to the autopilot.(Optional) Connect a Telemetry Radio to the TELEM port to receive data in Ground Control Station and communicate with the autopilot in flight.Connect I/O PWM-IN port of the PMB to the I/O PWM OUT of Pixhawk 4 using the 10 wire cable to send PWM signals to the motors.Connect PPM, DSM or SBUS Radio Control receiver to provide the autopilot with RC inputin manual and assisted flights modes.Connect the GPS module to provide the autopilot with positioning data during flight.For more details on how to connect Power Management Board(PMB) with Pixhawk 4 and the motors, refer to PX4 User Guide:https://docs.px4.io/en/assembly/quick_start_pixhawk4.htmlSET UPThe PX4 firmware is the brains of your autopilot operation and Version 1.7 is already loaded on your Pixhawk 4.To configure your vehicle as well as do mission planning and flight monitoring, you can use the free QGroundControl application (Windows, Mac, Linux), which you can download from /Once you have installed and successfully run QGroundControl, plug in Pixhawk 4 with the supplied USB cable, it should be automatically recognized. Click on and follow theon-screen instructions to finish the setup steps.As part of a first time setup, you’ll need to configure some of the required hardware compo-nents, such as:● Frame type configuration● Compass calibration● Radio control calibration● Accelerometer calibration● RC transmitter mode setup● ESC calibrationIn addition to mandatory calibrations, you may also choose to configure optional hardware including battery monitor, sonar, airspeed sensor, optical flow, OSD, camera gimbal, antenna tracker etc.ADDITIONAL INFORMATIONRefer to for detailed pin-outs of Pixhawk 4 connectors.Visit PX4 user guide at px4.io for detailed instructions including tutorials on how to change firmware and do advanced configurations with QGroundControl.Join PX4 Slack (http://slack.px4.io/) to receive support from the community and the PX4 team.。
Pixhawk(PX4)接线图及配件接线

1.安全开关接线
2.蜂鸣器接线
3.电流计接线
4.GPS接线-GPS箭头要跟飞控箭头一致。
5.RGB LED扩展板接线
RGB USB LED扩展板对应的I2C线和USB线接到飞控的I2C口和USB口。
6.接收机接线
1.PWM接法
PPM编码器的作用是把遥控器接收机的PWM信号转换为PPM,所以遥控器要设置为PWM模式,不能其他模式。
2.PPM接法
把遥控器设置为PPM模式,然后接到飞控的RC_IN接口
3.SBUS接法
把遥控器设置为SBUS模式,然后接到飞控的RC_IN接口。
注意:很多人以为SBUS接收机是插到飞控的SBUS接口,插到SBUS后发现接收机的灯不亮。
这是错误的接法。
因为飞控的SBUS接口是输出口,不是输入口。
只有RC_IN才是接收机的插入口。
这点很多人都搞错了。
所以不管是PPM还是SBUS模式,接收机都插到飞控的RC_IN接口。
7.电调接线
注意排针最上面是负极,这个跟接收机不同,接收机最上面是信号,这点要注意。
PIXHAWK飞控概览
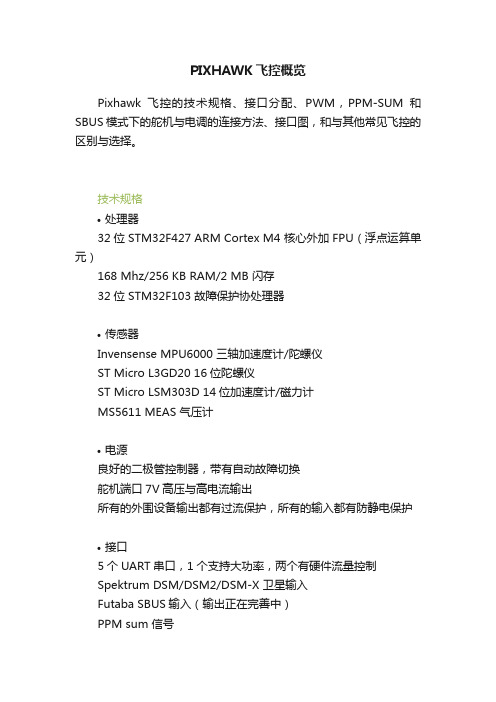
PIXHAWK飞控概览Pixhawk飞控的技术规格、接口分配、PWM,PPM-SUM和SBUS模式下的舵机与电调的连接方法、接口图,和与其他常见飞控的区别与选择。
技术规格•处理器32位 STM32F427 ARM Cortex M4 核心外加 FPU(浮点运算单元)168 Mhz/256 KB RAM/2 MB 闪存32位 STM32F103 故障保护协处理器•传感器Invensense MPU6000 三轴加速度计/陀螺仪ST Micro L3GD20 16位陀螺仪ST Micro LSM303D 14位加速度计/磁力计MS5611 MEAS 气压计•电源良好的二极管控制器,带有自动故障切换舵机端口7V高压与高电流输出所有的外围设备输出都有过流保护,所有的输入都有防静电保护•接口5个UART串口,1个支持大功率,两个有硬件流量控制Spektrum DSM/DSM2/DSM-X 卫星输入Futaba SBUS输入(输出正在完善中)PPM sum 信号RSSI(PWM或者电压)输入I2C, SPI, 2个CAN, USB3.3 与 6.6 ADC 输入•尺寸重量 38g宽 50 mm高 15.5 mm长 81.5 mmPixhawk 的接口分配PWM,PPM-SUM和SBUS模式下的舵机与电调的连接方法Pixhawk 接口图上图中针脚1在右边串口 1 (Telem 1),串口 2 (Telem 2) ,串口 (GPS) 针脚: 6 = GND, 5 = RTS, 4 = CTS, 3 = RX, 2 = TX, 1 = 5V.选择哪款飞控? APM 、PX4,还是 PIXHAWK•APM2.5与2.6是传统ardupilot飞控的最新(也是最终)版本:APM25 与 26 概览•PX4FMU与PX4IO 是这个新飞控家族的最初两个版本:Px4FMU 概览与 Px4IO 概览•Pixhawk是根据我们的需要,结合PX4FMU / PX4IO改进而开发出的PX4飞控的单块电路板版本。
雷迅创新 X7+自动驾驶仪 产品说明书

X7+自动驾驶仪产品说明书广州雷迅创新科技股份有限公司免责声明使用前,请仔细阅读本说明书中的内容,以确保您能够正确和安全的使用本产品。
请严格遵守手册安装与使用该产品如有不正确的使用,而造成的损害或损伤,不承担相应的损失及赔偿责任。
因发展和完善需要;本公司对产品细节和使用说明进行修改和完善的权利,相关资料以我司工作人员提供数据为准。
本手册中的内容按产品制造时的状态提供,除非适用的法律另有规定,否则不对文档的准确性、可靠性和内容作出任何类型的明确或默许的保证。
本产品仅为实验性无人系统纯硬件组件,运行软件由第三方提供;且无法把控用户的使用用途。
本公司仅有在产品质保期内提供售后服务之义务,本公司不对一切用途进行可靠性担保;任何理由、任何情况下导致的直接、间接、衍生、意外伤害等损失或惩罚,本公司概不负责。
一旦使用,即视为对本声明内容的认可和接受。
本说明版权归雷迅创新所有,未经许可,不得以任何形式复制翻印。
安全提示请遵守当地法律法规,勿在禁飞区内飞行。
如装配在无人机中,请及时按照国家法律法规进行实名登记,合法飞行。
禁止在机场净空保护区内飞行。
禁止在人员密集场所、军事及行政机构、交通道路等敏感区域飞行。
切勿在雨、强风或雾中飞行。
产品版本历史本产品为飞行控制器延伸版本,兼容上述产品的所有扩展硬件;除兼容固件不同外,用户可无缝替换。
产品在线文档本产品详细使用教程及固件下载请访问官方文档中心:地面站下载QGroundControl( QGC地面站)https:///en/getting_started/download_and_install.htmlMission Planner(MP地面站)https:///Tools/MissionPlanner/MissionPlanner-stable.msi配件清单序号物品数量1 X7+自动驾驶仪主机 12 I2C/CAN线 23 RSSI线 14 CAN PMU Lite电源管理模块 15 杜邦线 16 PW-Link WIFI数传 17 Type -C线 18 TF内存卡 19 I2C扩展板 110 ADC3.3线 1硬件参数类别参数处理器STM32H743传感器ICM-42688-P/ICM-20689/ICM-20689/RM3100/MS5611/MS5611 UART 5I2C 6(两个独立的I2C接口,两个集成在GPS/UART4接口)PWM输出14(其中12路支持dshot协议)RCIN 1(支持PPM/SBUS/DSM遥控信号协议)RSSI输入PWM或3.3模拟电压CAN标准总线 2Power输入2(Power A为普通ADC电源检测接口;Power C为CAN电流计接口安全开关 1GPS接口2(UART4可作为GPS2接口)ADC 1Debug 1JATG 1USB接口 1支持机型Ardupilot 固定翼/3-8旋翼/直升机/VTOL垂直起降/无人车/无人船等PX4固件PX4固件支持的所有机型工作环境和物理参数PM工作电压 4.5 ~ 5.5 VUSB电压 4.75 ~ 5.25 V伺服输入0 ~ 10v工作温度-20 ~ 80°c工作湿度5%~95%(不凝结)重量104g支持固件完美兼容ArduPliot 4.10/PX4 V1.12.3及以上版本固件固件及源代码X7+支持PX4和ArduPilot固件,编译完成的固件:固件下载和加载教程https:///flight-controller/x7/zh-hans/firmware.html如果您需要进行二次开发可以通过下列链接下载源代码。
无人机APM-PIXHAWK飞控应用研究

技术与应用APPLICATION编辑 陈姝宇文 / 张祖航 曹著明 薛翼飞无人机APM-PIXHAWK 飞控应用研究摘 要:对于复杂的无人机结构和原理,四旋翼无人机具有成本低、结构简单、使用方便等优势,同时也是最先进入民品市场的机型。
可是,该无人机对飞行控制操作能力要求很高,由此激发了大量科研人士对基于MEMS传感器的开源飞控的研制。
由于无人机飞控的发展,有效提升了多旋翼无人机、固定翼无人机、车模和直升机等设备的性能,使其具备多种运行模式,其功能已接近商业自动驾驶仪标准。
本文通过研究APM-PIXHAWK开源飞控的性能以及原理和相应的飞控调试中的出现问题,提出相关提升其性能的策略,以实现开源飞控在商业市场上的高性能及飞行器的飞行稳定性,更好地为无人机行业做出贡献。
关键词:无人机 飞控 开源 APM 研究从无人机的硬件设施来分析,飞控系统主要包括传感器、飞控计算机及伺服装置三部分。
整个无人机机载飞控系统的核心设备是飞控计算机,其主要功能是依据输入的相关信息(传感器等)、储存的相关数据和状态以及传输的数据与上行遥控指令(无线电测控终端),再完成分析、计算和处理,然后输出给伺服运行机构即舵机系统,来操纵控制无人机的舵面、前轮和发动机的风门,以实现对无人机的飞行或地面滑跑的控制。
无人机相关的状态信息主要由测定装置负责测量,无人机的主要测量装置有:陀螺仪(三轴角速度、垂直),传感器(攻角和偏航角、真实空速、磁航向、气压高度和高度差、发动机转速)等。
以舵机为执行元件的是伺服系统,其随动系统由若干部件组成,它将主要影响飞控系统带宽。
伺服系统是按照指令模型装置或敏感元件输出的电信号来操纵舵面,以实现无人机的自动稳定和控制。
在该伺服系统中常用的三种反馈是均衡反馈、位置反馈和速度反馈。
同时它们构成三种常见的舵回路形式,即硬反馈式、弹性反馈和软反馈式。
一、PIXHAWK 飞控ArduPilot Mega 自动驾驶仪(简称APM 自驾仪-APM V)是一款非常优秀而且完全开源的自动驾驶控制器,可应用于多旋翼、固定翼、车模、直升机等,同时还可以搭配多款功能强大的地面控制站配合使用。
PIXHACK硬件资料及使用教程

PIXHACK 中文入门指南PIXHACK是根据PIXHAWK硬件架构平台上由CUAV设计,并有CUAV生产的一款32位开源硬件飞控,由于硬件主要架构跟pix完全相同,所以完全兼容3DR APM固件以及pix原生固件。
PIXHACK在pix原版基础上优化了供电芯片,删减不必要接口,接口做调整优化,改为前后方插线。
主要的亮点是IMU分离设计,内置小型通用减震结构,并采用了CNC一体铣成型工艺,抗干扰性还是稳定性都有质的提升。
Pixhack经过Cuav长达一年的设计,无数个版本的优化及测试,已经达到了比较稳定理想的效果:硬件参数介绍硬件参数介绍:处理器 1. 32位2M闪存STM32F427 Cortex M4,带硬件浮点处理单元主频:168MHZ,256K RAM2. 32位STM32F103备份协处理器内置传感器Pixhack 采用IMU分离设计,内置通用性减震,一般飞行器不需要做减震处理(如果震动太大及频率过高还需减震)1.L3GD20 3轴数字16位陀螺仪2.LSM303D 3轴14位 加速度/磁强计3.MPU6000 6轴加速度计/磁强计4. MS5611 高精度气压计工作环境及电压温度范围:-5~50度PM传感器工作电压2-6SPM传感器输出电压5.4V 3APWM OUT输入供电电压最高9V(支持高压舵机,而原版Pixhawk不支持高于5.5V的供电)2路电源自动冗余(PM口和PWM OUT口),PM口优先供电,出现故障自动切换到PWM OUT口供电外观尺寸主控尺寸68mmX44mmX15MM 重量:68g数据接口1. 5个UART 1个兼容高电压,2个带有硬件流控制2. 1个CAN3. Spektrum DSM/DSM2/DSM-X卫星接收机兼容输入4. Futaba SBUS兼容输入和输出5. PPM信号输入6. RSSI(PWM或者电压)输入7. I2C协议设备扩展8. 预留SPI接口9. 3.3和6.6VADC输入10. 外部MICRO USB接口11. 13个PWM/舵机输出12. 多音蜂鸣器及解锁按键 状态led 接口外围设备支持固定翼多旋翼直升机车船固件支持支持接收机类型接收机类型S-Bus, DSM2,PPM 。
04 PWM、PPM、S.bus与DSM2接线方式解析
PWM、PPM、S.bus与DSM2接线方式解析一、PWM1、PWM的含义PWM ,Pulse Width Modulation的缩写,英文意思是脉宽调制,在航模中主要用于舵机的控制。
这是一种古老而通用的工业信号,是一种最常见的控制信号。
该信号主要原理是通过周期性跳变的高低电平组成方波,来进行连续数据的输出。
如下图所示:Paste_Image.png而航模常用的PWM信号,其实只使用了它的一部分功能,就是只用到高电平的宽度来进行信号的通信,而固定了周期,并且忽略了占空比参数。
PWM的优点很明显:由于传输过程全部使用满电压传输,非0即1,很像数字信号,所以他拥有了数字信号的抗干扰能力。
脉宽的调节是连续的,使得它能够传输模拟信号。
PWM信号的发生和采集都非常简单,现在的数字电路则使用计数的方法产生和采集PWM信号。
信号值与电压无关,这在电压不恒定的条件下非常有用,比如电池电压会随消耗而降低,DCDC都会存在纹波等等,这些因素不会干扰信号的传输。
2、PWM通信协议高电平有效。
高电平电压:常见4.8~6V,也有使用3.3V 和更高电压的,要看舵机的承受能力。
信号周期:常见50Hz和300Hz两种,前者被称为模拟舵机,后者被称为数字舵机。
注意纠正一个概念,舵机的模拟和数字之分其实指的是信号采集器,是使用模拟电路还是使用数字电路,跟信号频率无关,当然数字采集器的采集能力较强,所以频率可以高一些。
但是随着技术进步,现在即使买50Hz的舵机也同样使用数字电路进行信号采集,哪里来的模拟舵机呢?建议大家忘记这两个词汇吧。
脉宽宽度:50Hz信号多用于老式舵机,是上个世纪舵机的主要控制信号形式,其脉宽宽度为0.5ms至2.5ms。
300Hz 信号则是目前使用的最广泛的信号形式,其波形速度快,每秒可以传输300次,所以相应的脉宽也有所减小为0.9ms至2.1ms。
两种舵机控制信号如下图所示:50hz与300hz的PWM控制信号与角度关系PPM二、什么是PPMPWM信号被广泛用于舵机控制,但是它有一个明显的缺陷,就是有多少个舵机就需要多少个控制线路。
Matrix 快速指南v1.17a
® Ver.1.17 !注意:本说明适用于固件版本v1.3.13及以后版本 本版本更新了“第9步”内容
第1步. 确保模块间连线正确
2 (1) Matrix飞行管理单元(FMU) (2) 卫星导航单元(GNU) (3) USB数据线(接地面站) (4) 外置罗盘单元(ECU) (5) 航灯单元(NLU) (6) 电源管理单元(PMU) (7) 地形跟随单元(TFU)
闪烁时颜色指示健康状态 绿色=GNU、内置以及外置传感器状态良好 黄色=GNU、内置或外置传感器之一状态一般 紫色=GNU卫星信号严重不良,禁止进入卫星定点模式 白色=机身振动过于剧烈,需增加减振措施 红色=初级低电压保护触发 常亮时颜色指示相应操作 红色常亮=终极低电压保护触发,开始自动着陆 黄色常亮 (来回拨动模式开关4次后) =罗盘开始校准 黄色常亮 (接通电源后) =电调校准 白色常亮 (横滚拨至最右, 来回拨动模式开关4次后) =IMU开始水平校准 绿色常亮3秒=罗盘(或IMU)校准成功 红色常亮3秒=罗盘(或IMU)校准失败 绿灯常亮1.5秒=记录A、B、断点,断点续喷 解锁、上锁 黄色常亮1秒=解锁(或上锁)成功, 同时GNU状态不佳或无GNU 绿色常亮1秒=解锁(或上锁)成功, 同时GNU状态良好 禁止解锁 红色慢闪(0.5Hz)=IMU未校准,不可解锁 红色快闪(16Hz)=异常(联系俏动技术支持) FMU状态灯指示 : ! 注意:只有处于“绿色秒闪”状态时, 才可正常起飞 绿色快闪(16Hz)=启动中 绿色秒闪=正常 黄绿交替快闪=固件更新 黄灯常亮=校准进行中(包括罗盘、IMU、电调) 红色慢闪(0.5Hz)=IMU未校准 红色常亮=异常 PMU状态灯指示 : 绿色常亮=电压输出正常 熄灭=无电压输出
水平旋转
6步PWM驱动直流无刷电机接线方法
6步PWM驱动直流无刷电机接线方法步骤1:准备PWM控制器和BLDC电机首先,我们需要准备一台PWM(脉宽调制)控制器和一台BLDC(无刷直流)电机。
PWM控制器是用来控制电机转速和方向的设备,而BLDC电机则是一种无刷直流电机,它具有高效率和低噪音的优点。
步骤2:了解PWM控制器的引脚功能下一步是了解PWM控制器的引脚功能。
通常,PWM控制器会有一组有序的引脚,包括电源引脚、PWM输入引脚和电机继电器输出引脚。
请参考PWM控制器的数据手册,以了解每个引脚的具体功能和注意事项。
步骤3:连接电源和地线首先,将PWM控制器的电源引脚连接到电源线,然后将地线连接到电机的地线。
确保连接正确,并使用绝缘套管进行包裹,以防止短路或其他电气危险。
步骤4:连接PWM输入引脚接下来,将PWM控制器的PWM输入引脚连接到外部控制器或控制信号源。
请确保正确地连接信号源,并将信号线的长短适当调整,以避免信号干扰或延迟。
步骤5:连接电机继电器输出引脚在完成PWM控制器的连接后,将电机继电器输出引脚连接到BLDC电机的相应引脚上。
电机继电器输出引脚可以通过连接线或插头连接到电机,但请确保连接牢固可靠,并使用电气胶带进行固定,以避免松动或脱落。
步骤6:进行出厂测试在所有连接完成后,进行出厂测试是必不可少的。
通过调整PWM控制器的输入信号和观察BLDC电机的转速和方向,确保一切正常。
如果发现任何异常情况,及时检查和修复连接或更换故障设备。
总结:以上是PWM驱动BLDC电机的六个步骤。
在进行实际连接之前,请确保仔细阅读和理解PWM控制器和BLDC电机的数据手册,并按照其要求正确连接。
此外,根据具体设备的不同,可能有额外的连接步骤或注意事项,请充分了解并遵守。
PWM,SBUS,PPM信号转模拟电压的方案
PWM,SBUS,PPM信号转模拟电压的⽅案PWM,SBUS,PPM信号转模拟电压的⽅案-----------------本⽂由撰写,并提供相应产品服务。
----------------案例场景有个内部采⽤电瓶车的驱动器的⽆线⼩车,现在需要使⽤遥控器控制⼩车的前进后退。
也就是说:把之前电瓶车的⼿动油门把⼿换成⽆线控制的。
遥控器选择⽬前市⾯上有好多的品牌:“天地飞,futaba,斯翼等。
遥控器分为接收器和发射器:发射器就是控制⼈⼿⾥拿的摇杆那⼀部分;接收器则是信号接收端。
⽤来给⼩车的电机驱动器发送信号的。
但是现在有个问题,接收机的输出信号并不能直接给电机驱动器使⽤。
因为常见遥控接收机的输出信号⼀般有三种:舵机PWM信号、SBUS、PPM。
⽽电瓶车的电机驱动器的输⼊信号要求⼀般是个模拟电压(常见的电瓶车把⼿其实就是⼀个旋转电位器,旋转到不同的位置会输出不同的电压值,以此来控制电机驱动器,从⽽达到调节电机转速的问题。
)因此,要想使⽤遥控器,必须解决接收机输出信号转成模拟电压的问题。
为此,我们设计了⼀款。
下图为增加转换板之后的系统框架图解决⽅案1. 舵机PWM转电压舵机PWM,基本上每个接收机都会输出的⼀种⽐较常见PWM信号:⼀般信号频率50HZ,信号⾼电平变化时间在1ms-2ms之间变化(不同的遥控器会有⼩幅度的差异)。
舵机PWM基础知识请点击:转换模块的核⼼思路就是采集接收机输出的PWM型号,接着分析⾼电平时间,然后根据⾼电平时间输出相应的线性变化模拟电压值。
⼀般舵机PWM输出的⾼电平时间为1ms-2ms之间变化,但是实际上我们为了匹配不同的遥控器和留有⼀定余量,我们设定电平电话的⾼电平区间为1.1ms-1.9ms之间。
也就是说当采集到1.1ms的⾼电平PWM信号时,模拟电压输出最⼩值(0V);当采集到1.9ms的⾼电平时间PWM信号时,模拟电压输出最⼤值(5V)。
本⽂设计的模块中,⼀共留出了4路PWM转电压的通道。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
PWM、PPM、S.bus与DSM2接线方式解读
一、PWM
1、PWM的含义
PWM ,Pulse Width Modulation的缩写,英文意思是脉宽调制,在航模中主要用于舵机的控制。
这是一种古老而通用的工业信号,是一种最常见的控制信号。
该信号主要原理是通过周期性跳变的高低电平组成方波,来进行连续数据的输出。
如下图所示:
Paste_Image.png
而航模常用的PWM信号,其实只使用了它的一部分功能,就是只用到高电平的宽度来进行信号的通信,而固定了周期,并且忽略了占空比参数。
PWM的优点很明显:
由于传输过程全部使用满电压传输,非0即1,很像数字信号,所以他拥有了数字信号的抗干扰能力。
脉宽的调节是连续的,使得它能够传输模拟信号。
PWM信号的发生和采集都非常简单,现在的数字电路则使用计数的方法产生和采集PWM信号。
信号值与电压无关,这在电压不恒定的条件下非常有用,比如电池电压会随消耗而降低,DCDC都会存在纹波等等,这些因素不会干扰信号的传输。
2、PWM通信协议
高电平有效。
高电平电压:常见4.8~6V,也有使用3.3V 和更高电压的,要看舵机的承受能力。
信号周期:常见50Hz和300Hz两种,前者被称为模拟舵机,后者被称为数字舵机。
注意纠正一个概念,舵机的模拟和数字之分其实指的是信号采集器,是使用模拟电路还是使用数字电路,跟信号频率无关,当然数字采集器的采集能力较强,所以频率可以高一些。
但是随着技术进步,现在即使买50Hz的舵机也同样使用数字电路进行信号采集,哪里来的模拟舵机呢?建议大家忘记这两个词汇吧。
脉宽宽度:50Hz信号多用于老式舵机,是上个世纪舵机的主要控制信号形式,其脉宽宽度为0.5ms至2.5ms。
300Hz 信号则是目前使用的最广泛的信号形式,其波形速度快,每秒可以传输300次,所以相应的脉宽也有所减小为0.9ms至2.1ms。
两种舵机控制信号如下图所示:
50hz与300hz的PWM控制信号与角度关系
PPM
二、什么是PPM
PWM信号被广泛用于舵机控制,但是它有一个明显的缺陷,就是有多少个舵机就需要多少个控制线路。
而很多时候不希望线路太多,尤其是遥控器的无线信号,只可能有一路通信要传递多路舵机控制信息,于是PPM信号诞生了。
1、PPM的含义
PPM,pulse-positionmodulation的缩写,英文意思是脉冲位置调制。
在上个世纪,航模领域中主要使用这种信号作为遥控器
的主要无线通信协议,后来被用于教练线和模拟器。
该信号使用多个脉冲作为一组,并以组为单位周期性发送,通过组内各个脉冲之间的宽度来传输相应通道的舵机控制信息。
2、 PPM通信协议
高电平有效。
高电平电压:常见4.8~6V。
信号周期:24ms。
单个脉冲宽度:0.4ms
脉冲间距:0.9ms至2.1ms
三、bus(这里指的不是公共汽车)
1、 S.bus的含义
S.bus,是Smart-BUS的简称,即智能总线。
该总线是日本Futaba公司自己使用的专用总线协议。
该协议有两个特点:一个是数字化,一个是总线化。
数字化是指的该协议使用现有数字通信接口作为通信的硬件协议,使用专用的软件协议,这使得该设备非常适合在单片机系统中使用,也就是说适合与飞控连接。
这也就是我为什么要将这个协议详细叙述的原因,我认为使用PX4飞控是离不开这种纯数字的通信协议的。
另外在其硬件协议中使用了数据校验增加抗干扰能力。
总线化指的是一个数字接口可以连接多个设备,这些设备(主要是舵机和电调)通过Hub 与一个S.bus总线连接,并能够得到各自的控制信息。
如下图所示:
2、S.bus 硬件协议
S.bus使用RS232C串口的硬件协议作为自己的硬件运行
基础。
使用TTL电平,即3.3V。
使用负逻辑,即低电平为“1”,高电平为“0”。
波特率:100000(100k),注意:不兼容波特率115200。
数据位8bit,1个停止位,无校验位,无流控制。
3、S.bus软件协议
每帧数据还有25字节。
每字节含有12个比特,使用1个起始位“0”,8个数据位,1个奇校验位(8个数据位中1的数量为奇数则此位为“1”否则为“0”),两个终止位“1”。
采用LSB first方式发送,即最低有效位(二进制数据右侧)先发。
帧头:1111 0000(二进制),帧尾:0000 0000(二进制)。
数据:从第1数据字节起,到第22字节,一共有数据位176个,它们按照顺序分别是通道1至通道16的舵机控制数据,每个通道占11比特。
取值范围是0~2047。
第23字节我管它叫做“功能字节”,第0比特为数字通道1的值,第1比特为数字通道2的值,第2比特为丢帧信息,第3比特为失效保护开关,第4~7比特暂时保留没用。
四、DSM2(DSMX)
1、DSM2(DSMX)的含义
DSM是Digital Spread Spectrum Modulation的缩写,一共有三代: DSM、DSM2、DSMX。
国内最常见的是DSM2,JR 的遥控器和Spectrum 的遥控器都支持。
该协议也是一种串行协议,但是比S.BUS更加通用,使用的规范串口定义,所以市面上兼容接收机更加便宜,兼容的设备也更多,比如电直的三轴陀螺VBar就可以直接接受DSM2信号。
但是该协议并不是一种总线化的协议,要靠接收机取把协议变为PWM来驱动舵机,DSM2接口也只能连接接收机和卫星接收机,不过对于飞控来说这个无所谓,反正也是一个接口连接到飞控就可以了。
DSMX是DSM2的升级版,协议基本一样就是速率加快了。
DSMX协议可以用于双向传输,即能够将飞机上的信息传回遥控器上在液晶屏显示,不过对于玩儿飞控这个功能不重要,有了电台和PC,这个意义不大。
所以我们下面只讨论DSM2协议的接收问题。
2、 DSM2硬件协议
DSM2设备使用三线连接,黑色线是地线,红色是电源线,另一条是信号线,这个跟舵机一样,但是注意:电源线是3.3V。
信号线上跑的是规范TTL串口,3.3V电平,串口的电平逻辑跟普通TTL串口一致,可以直接跟现在的大部分单片机兼容,比如STM32。
串口波特率115200,数据位8bit,1
个停止位,无校验位,无流控制。
3、 DSM2软件协议
软件协议简单得多。
每一帧数据使用两个Byte,16字节。
第1个字节表示此帧状态,为0的时候表示此帧为遥控数据,1的时候表示为其他数据。
后面4个字节为通道ID,对应接收机上面的输出0: Throttle, 1: Aileron, 2: Elevator, 3: Rudder, 4: Gear, 5: Aux1, 6: Aux2, 7: Aux3。
后11个字节是0~2047的通道数据。
1023为中间值对应输出1.5ms的PWM信号,0对应0.75ms,2047对应2.25ms。