国内外振动振荡压路机动力学模型
冲击压路机减振系统参数的仿真分析
冲击压路机减振系统参数的仿真分析摘要:近几年来,随着现代技术以及用户的需要,人们对冲击压路机牵引等舒适性提出了更高的要求,工程车辆各个性能的好坏直接性影响着驾驶员的舒适度、燃油效率以及开车安全等问题。
因此,对冲击压路机减振系统进行设计是当务之急。
本文对冲击压路机的工作原理以及动力学方程进行阐述,重点分析其减振系统参数的仿真模型。
关键词:冲击压路机;减振系统;参数设计;仿真模型工程车辆的舒适性主要是指工程车辆在行驶的过程中所产生的振动与冲击从而使人体感到不舒适等,并对人体的健康有一定的损害。
冲击压路机在行驶时,由于地面的激励以及压实轮的冲击等因素引起的振动,会使驾驶员产生疲劳,并且使工作效率降低,甚至发生安全事故等,因此,必须对冲击压路机的振动进行设计,从而减少对驾驶员的损害以及提高工作效率等,具有实际的意义。
1.冲击压路机的工作原理以及动力学方程冲击压路机主要是由牵引车、工作装置、缓冲减振机构以及行走机构等几部分构成,所使用的冲击压实技术主要是一种非圆形以及大功率、路基的技术,这种技术是产生在上个世纪九十年代。
能够在短途转场从而不损害路面,同时在工作中,还能够选用平地机以及推土机配合使用,更进一步压实。
但是,冲击压路机在进行工作时,会产生一定的冲击力,这种冲击力会影响到驾驶员的舒适度,以及减少结构的使用寿命以及降低动力输出性能等。
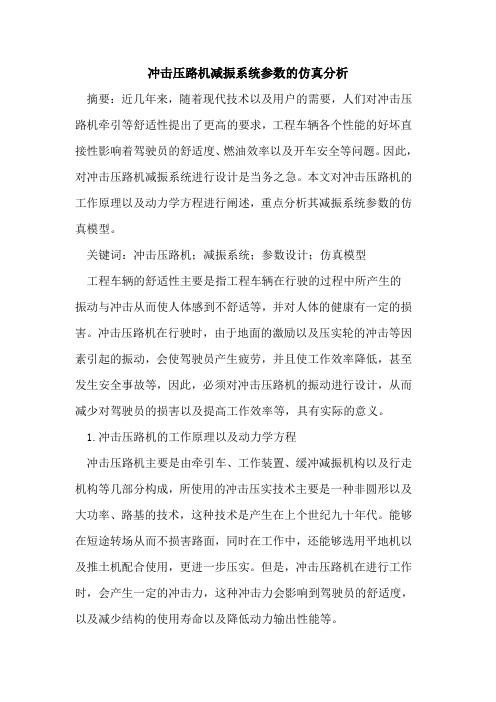
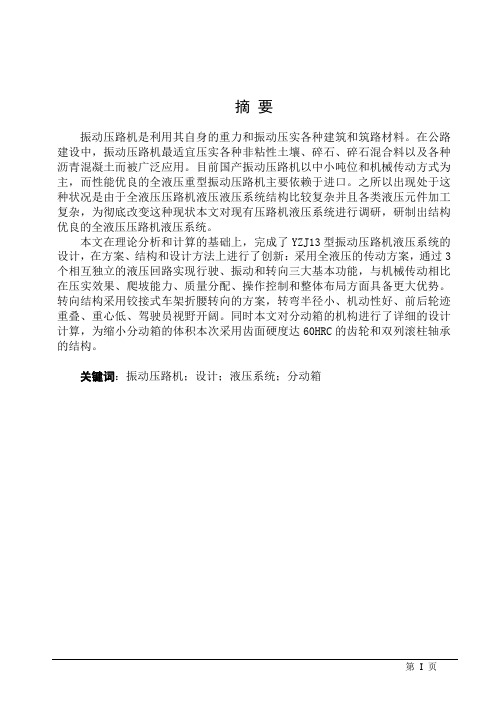
经过研究发现,冲击压路机的振动主要是由牵引侧以及车架所产生的,因此,对其进行隔振时也应该对这两部分采取措施,采用动力学微分方程建立冲击压路机缓冲减振系统模型图,如下图1所示:在上图中,m1、m2以及m3表示的是牵引车、车架以及工作论的质量;k1、k2以及c1、c2表示的牵引车与车架,车架与滚轮之间的减振系统的阻尼系数以及刚度系数;f表示的是牵引车的牵引力;x1、x2以及u表示的是牵引车、车架以及滚轮的水平位移速度。
如果假设牵引车的速度是匀速行驶的,并且冲击压路机在外力的作用下是处于非常平衡的状态,f(t)就为滚轮重心发生突降时的冲击力。
振动压路机的振动系统分析
前言振动压实在压实机械的发展史上是一项突破性的科技进步,从此压实效果的提高不再单纯地依靠增加压实机械自重来实现。
振动压路机自20世纪30年代问世以来获得了迅速的推广与应用,振动压路机很快成为压实机械领域的主导产品。
振动压实机械是一种与压实对象的材料特性、压实的方法和压实工艺有着十分密切关系的作业机械。
因此从振动压实机械发展的历史进程来看,它总是在与压实理论,方法工艺以及被压材料的相互促进中发展起来的。
通常将压实机械的性能与被压材料的特性、及压实的理论、方法、工艺之间相互作用的综合技术称为压实技术,而压实机械与压实技术也总是同步发展的。
本论文的重要特点是通过振动压路机在道路施工中的重要意义及其工作原理,阐述了振动压路机的振动系统的组成、特点、工作原理。
并对压路机的振动系统的一些常见故障进行了检测与维修,并通过案例分析对振动压路机的振动系统进行了分析,对振动系统的常见故障也进行了案例分析。
同时阐述了振动压路机的发展趋势,增加了文章的阐述能力。
本论文主要通过振动式压路机振动系统的分析,阐述了振动压路机的振动系统在道路施工中的重要意义。
通过对本论文的阅读希望感兴趣的朋友对振动压路机的振动系统有个大概的了解1.压实的基础知识1.1压实的意义随着社会的不断发展,车辆的不断增加,越来越繁忙的交通对道路的要求也越来越高。
道路重量的好坏,能否符合现代交通事业发展的需求,其中很大一部分是受到压实效果的影响,因此压实有着非同寻常的意义。
压实使路基及路面各结构层的材料具有足够的密实度,这对于公路的路基、路面具有十分重要的意义。
压实可以充分发挥路基和路面材料的强度,可以减少路基、路面在行车荷载作用下产生的永久变形,还可以增加路基土和路面材料的不透水性和强度稳定性。
压实的这几大作用,对于增强道路路面的使用性能和延长寿命是非常重要的。
路基、底基层或面层材料压实不足在使用过程中,路面上就可以产生车辙(辙槽)、裂缝、沉陷和水损坏,也可能使整个路面产生剪切破坏。
智能振动压路机建模与试验
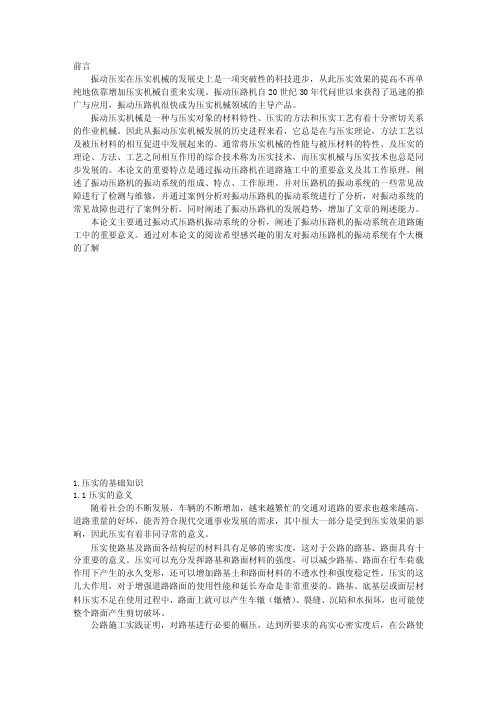
装在 一个 可 以转动 的机 架上 ,2个 偏 心 轴上 的偏 心
块质量相 同、转 速相等 、方 向相反 ,通 过液压装
置控 制该 偏 心 轴 机 架 的偏 转 角 度 ,从 而 实 现 垂 直
振 幅 、振 动方 式 和 行 驶 速 度 等 工 作 参 数 ,压 路 机 可始终 处 于 最 佳 工 作 状 况 ,使 司 机 专 注 于 压 路 机 的驾 驶 ,提 高 了 路 面 施 工 的 质 量 和 效 率 。 目前 , 德国 B OMAG 公 司 的 “ 多 星 ” 系 统 是 这 一 领 域 智 中的代表 机型 [ ,而我 国智 能化压 路机 的研 制仍 然 1 ] 是一 个前 沿课题 。 厦工集 团三 明 重 型 机 器 有 限 公 司与 福 州 大 学 机械 学 院合 作 承担 国家 “6 ” 课题 ,研 制 成 功 一 83 种新 型智能振 动压 路机 [ 。它 的突 出特点 是可 以通 2 ] 过振 动轮 内 的调 整 机 构 自动 改 变 激 振 方 向 ( 直 垂 或水平 ) ,以适应 被 压 实 材料 的要 求 。根 据这 种 智 能振 动压 路 机 的运 动 特 点 ,需 要 分 别 建 立 垂 直 和 水平 振 动 的动 力 学 模 型 ,通 过 试 验 验 证 和 改 进模 型 ,使模 型很 好 地 模 拟压 路 机 各 种 工 况 下 的 动 力 学特 性 ,为 智 能压 路 机 的 设 计 和 施 工 作 业 规 范 的 制定 提供理 论依 据 。
为F =2 w CS t・ i 1 Me Oo s a,垂 直方 向的合力 为 F2  ̄ n =
1 智能压路机的结构特点
德国 B OMAG 公 司 的 “ 多 星 ” 系统 将 2个 智
振动压路机与振动压实的前沿技术
振动压路机与振动压实的前沿技术祁隽燕 葛恒安振动压路机一出现,就立即引起世人的关注,与静作用压路机相比,它具有压实效果好、生产效率高等优点,在工程质量和进度要求越来越严格的今天,受到广大施工单位的一致青睐。
随着振动压实技术和控制技术的不断提高,特别是微电子技术、自动控制技术和计算机技术等的迅猛发展,振动压路机的发展前景更是一片光明。
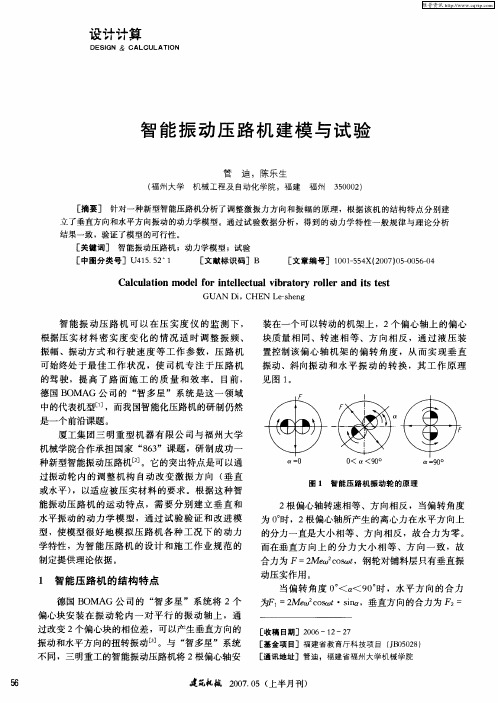
1 振动压路机1 1 发展概况振动压路机存在的时间并不长,1930年德国人最先使用了振动压实技术,并于1940年成功发明了拖式振动压路机。
振动压实技术和振动压路机的出现,彻底改变了压实效果简单依靠重量或增大线压力的方式。
随着振动压实理论研究的不断深入,振动压路机产品的规格品种也越来越多,尤其是20世纪70年代静液传动和液压控制技术在振动压路机上得到了应用,出现了调频调幅式振动压路机,为压实工作参数的优化调节奠定了基础,使得振动压路机迅速成为世界压路机市场的主导者,现已占据了世界市场80%以上的份额。
国内振动压路机的发展源于1961年西安公路学院(长安大学前身)与西安筑路机械厂联合开发出的3t自行式振动压路机。
1984年徐州工程机械制造厂引进瑞典戴纳帕克(Dynapac)公司的CA25单钢轮振动压路机和CC21型串联式振动压路机技术,1987年洛阳建筑机械厂引进了德国宝马(Bo mag)公司BW217D和BW217AD振动压路机技术, 90年代江麓机械厂引进了德国伟博麦士(Vibro max)公司的W1102系列振动压路机技术。
当时国外最为先进的振动压实技术几乎都进入了中国,从此中国的压路机制造业进入了发展的快车道。
目前,我国已形成以徐工和洛建为代表的80多家压路机生产企业,并初步形成了手扶式振动系列、拖式振动系列、自行式振动系列等产品,基本上可以满足国内需求,并具有一定的出口能力。
由于我国振动压路机起步较晚,整体水平与国外先进水平相比仍有较大差距,尤其是重型和超重型振动压路机生产数量和品种仍然较少,路肩和沟槽等专用压实设备缺乏,产品的可靠性和外观质量等综合技术经济指标和自动控制技术方面仍低于国外先进水平。
毕业设计(论文)-YZJ13型全液压振动压路机液压液压系统设计
第 II 页
目录
摘 要..................................................................................................................... I Abstract................................................................................................................ II 1.绪论.................................................................................................................. 1 1.1 引言........................................................................................................ 1 1.2 压路机的用途及分类............................................................................ 1 1.3 国内外双钢轮振动压路机发展现状.................................................... 3 1.4 双钢轮振动压路机发展趋势................................................................ 5 1.5 课题提出的背景与意义........................................................................ 7 1.6 本文的研究内容.................................................................................... 7 2.振动压实理论.................................................................................................. 9 3.振动压路机动力学模型及运动方程............................................................ 12 3.1 研究振动压路机动力学模型的意义.................................................. 12 3.2 两个自由度系统振动压路机的运动方程......................................... 12 3.3 运动方程中各参数的取值.................................................................. 15 4. 液压系统总体结构设计............................................................................... 17 4.1 行走液压系统的设计.......................................................................... 18 4.1.1 全轮驱动液压压路机的优点.................................................. 18 4.1.2 全轮驱动液压压路机的缺点.................................................. 19 4.2 振动液压系统设计.............................................................................. 19 4.2.1 开式液压震动系统................................................................... 19 4.2.2 闭式液压振动系统................................................................... 20 4.2.3 工作装置液压振动系统形式的选用....................................... 21 4.3 转向液压系统设计.............................................................................. 22 4.4 液压系统原理图.................................................................................. 23 5. 液压系统计算与选型................................................................................... 25 5.1 液压系统............................................................................................. 25 5.1.1 行走液压系统.......................................................................... 25 5.1.2 振动液压系统.......................................................................... 25 5.1.3 转向液压系统.......................................................................... 26 5.2 各液压系统所需功率计算.................................................................. 26 5.2.1 行驶液压系统所需功率计算................................................... 26 5.2.2 转向液压系统所需功率计算................................................... 27 5.2.3 振动液压系统所需功率计算................................................... 27 5.3 主要液压元件计算选型..................................................................... 28
振动压路机-土体系统动力学模型及参数研究
[中 图 分 类 号 ]TU663
[文 献 标 识 码 ]A
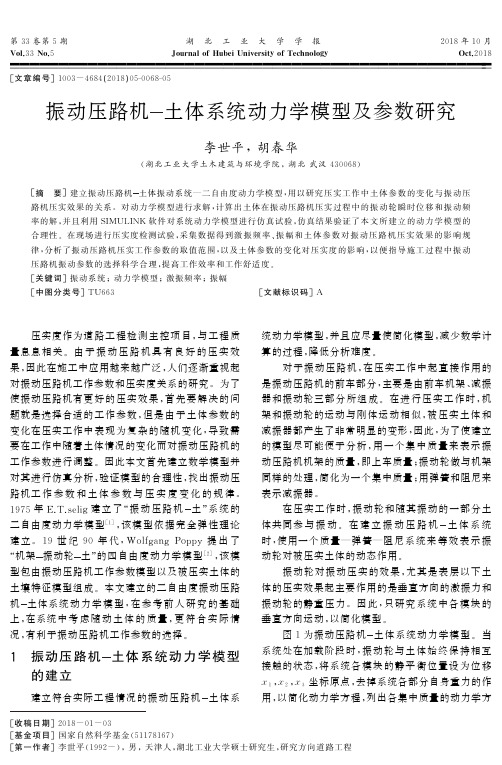
压实度作为道 路 工 程 检 测 主 控 项 目,与 工 程 质 量息息相 关. 由 于 振 动 压 路 机 具 有 良 好 的 压 实 效 果 ,因 此 在 施 工 中 应 用 越 来 越 广 泛 ,人 们 逐 渐 重 视 起 对振动压路机工作参数和压实度关系的研究.为了 使振动压路机有更 好 的 压 实 效 果,首 先 要 解 决 的 问 题就是选择合适的 工 作 参 数,但 是 由 于 土 体 参 数 的 变化在压实工作中 表 现 为 复 杂 的 随 机 变 化,导 致 需 要在工作中随着土体情况的变化而对振动压路机的 工作参数进行调整.因此本文首先建立数学模型并 对 其 进 行 仿 真 分 析 ,验 证 模 型 的 合 理 性 ,找 出 振 动 压 路机工作参数和土体参数 与压实度变化的 规律. 1975年 E.T.selig建 立 了 “振 动 压 路 机 土”系 统 的 二自由度动力 学 模 型[1],该 模 型 依 据 完 全 弹 性 理 论 建 立.19 世 纪 90 年 代,Wolfgang Poppy 提 出 了 “机架 振动轮 土”的四 自 由 度 动 力 学 模 型[2],该 模 型包由振动压路机工作参数模型以及被压实土体的 土壤特征模型组成.本文建立的二自由度振动压路 机 土体系 统 动 力 学 模 型,在 参 考 前 人 研 究 的 基 础 上,在系统 中 考 虑 随 动 土 体 的 质 量,更 符 合 实 际 情 况 ,有 利 于 振 动 压 路 机 工 作 参 数 的 选 择 .
YZ20D 型振动压路机总体毕业设计(机械CAD图纸)

YZ20D 型振动压路机总体设计摘要振动压路机是一种高效的压实机械,广泛应用于道路建设施工中。
目前国产振动压路机以中小吨位和机械传动方式为主,性能优良的全液压重型振动压路机主要依赖于进口。
为彻底改变这种现状,必须研制和生产具有自主知识产权的高性能重型振动压路机。
本文本论文简述了国内外压实设备和压实技术的发展概况、振动压实的原理、振动轮的结构和工作原理、振动压路机的压实特性与压实效果,动力学特性和振动压实机理进行了研究与分析,建立了振动轮的数学模型,明确了振幅、加速度、激振力、对地面作用力与振动频率之间的动态响应关系,以此作为参数的设计依据,计算出了 YZ20D 型振动压路机的整机工作质量、振动频率、振幅、激振力、动机功率等压路机压实作业中重要的振动性能参数及振动轮等关键技术结构进行研究及确定,最大功率。
本文在理论分析和计算的基础上,完成了 YZ20D 型振动压路机总体和液压系统、振动轮总成等主要部件的设计。
关键词: 振动压路机;总体参数;功率计算;爬坡校核;液压系统YZ20D Type Vibratory Rollers Overall DesignAbstractVibratory roller is a kind of highly efficient compaction machine which is widelyused in the road construction. Most of domestic vibratory rollers adopting mechanicaltransmission are light or medium size at present, while full hydraulic and heavyvibratory rollers with high performance are mainly depended on importation. Tochange the actuality completely, the heavy vibratory rollers with high performance anour own intellectual property rights must be developed and manufa ctured.The general development of road rollers is stated in this p aper. The theories ofvibratory compacting and the configuration and wor k theory of vibr atory wheel andthe compact characteristic and effect of vibratory road roller a re intr oduced. In thispaper the physical property, dynamic character istics and vibration compactionmechanism of soil are studied and a mathematical model of vibr atory rollers is created.The dynamic responses between the amplitude, acceleration, exciti ng force, actingforce on the ground and vibration frequency are determined, and according to which,frequency, amplitude and mass are designed. Determine the impo rtant vibratoryperformance specifications for the compaction operation of roll er,such as theoperating mass,vibr atory frequency,amplitude,centrifugal force,power of engineand so on.Based on theoretical analysis and calculation, the overall design of modelYZ20D vibratory roller and the main part design of hydraulic system,r oller andvibration damping system have been complished.Key Words: Vibr atory roller;the overall parameters;Grade ability check ;shock absor bers;Hydraulic system目录1 绪论....................................................................... . (1)1.1 研究的背景...................................................................... (1)1.2研究的意义...................................................................... (1)1.3国内外相关研究现状...................................................................... (6)1.3.1国内研究情况.................................................................... (6)1.3.2国外研究情况.................................................................... (7)1.4研究的主要内容...................................................................... .. (8)2 振动压路机设计综述....................................................................... (9)2.1振动压路机...................................................................... (9)2.1.1振动压路机的种类.................................................................... (9)2.1.2振动压路机的基本结构和特点 (10)2.1.3振动压实的基本原理.................................................................... (10)2.1.4振动压实的性能特点.................................................................... (11)2.1.5振动压实的结构特点.................................................................... (11)2.2振动压路机总体设计...................................................................... . (12)3 总体参数确定及部件设计计算 (15)3.1振动压路机总体参数的确定.......................................................................153.1.1振动压路机总体参数的选择依据 (15)3.1.2名义振幅的选择.................................................................... (15)3.1.3振动压路机工作频率的选择..................................错误!未定义书签。
水平振荡和垂直振动压路机动力学模型研究及展望
(. 1 福州大学 机械工程学 院, 福建 福州 300 ; . 5 1 8 2 福建农林大学 机 电工程学院 , 福建 福州 300) 5 0 2
摘要 : 水平振荡压路机和垂直振动压路机是 大型工程基础施工 中最典型的 2种压 实机 械 , 概述 了国 内外几种 典
Ab t a t s r c :Th o i n al — s i a o y a d v r ia l — i r t r o lr r wo t p c lc t g re fc r - e h rz t l o c l t r n e t l v b a o y r l s a e t y ia a e o i s o o o y l c y e n p c i g ma h n sf rlr e b scc n tu t n . u a t c ie o g a i o s r c i s By s mma ii g t p c l y a i l d l ft e h rz n a — n a o rz n y ia n m c d a mo e so h o io t l l . s i a o y a d v ri a l — i r t r o lr ,h d a t g sa d d s d a tg sa e f s n l z d B s d o y o c l t r n e t l v b a o y r l s t ea v n e n ia v n a e r i t a y e . a e n l c y e a r a
中 图 分 类 号 : 2 T 1 . O3 ; H 13 1 文献 标 识 码 : A 文 章 编 号 : 6 2—5 8 (0 10 —0 7 17 5 1 2 1 ) 3 29—0 6
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第33卷 第2期吉林大学学报(工学版) Vol.33 No.2 2003年4月Journal of Jilin University(Engineering and Technology Edition) Apr.2003文章编号:1671-5497(2003)02-0100-04国内外振动振荡压路机动力学模型田丽梅1,杨春红2,王国安3(11吉林大学地面机械仿生技术教育部重点实验室,吉林长春 130025;21河南省公路局筑路机械厂,河南郑州 450000;31长安大学工程机械学院,陕西西安 710064)摘 要:振动振荡压路机是近二十几年来发展起来的一种综合振动压实机械与振荡压实机械优点的新型压实机械。
本文介绍了几种典型的振动、振荡压路机的动力学模型以及各个模型的特点;并根据压路机及工作介质的特点,提出建立一种适合串联式、多自由度的振动振荡压路机动力学模型的建议。
关键词:压路机;振动;振荡;动力学模型中图分类号:O32;TH11311 文献标识码:AVibratory and oscillatory roller dynamical modelin domestic and abroadTIA N L i2mei1,YA N G Chun2hong2,W A N G Guo2an3(1.The Key L aboratory f or Terrain2M achine Bionics Engineering,The Minist ry of Education,Jilin U niversity,Changchun 130025,China;2.The Road B uilder Factory of Highw ay B ureau of Henan,Zhengz hou450000,China;3.College of Engi2 neering M achinery,Chang′an U niversity,Xi′an710064,China)Abstract:Vibratory and oscillatory roller is a new kind of press machine which was developed in these two decades.It synthesized the advantages of both vibration presses and oscillation presses.Studying the dynamic model of vibratory and oscillatory roller can make us understand work process of roller.It introduced impor2 tant fatures about several typical dynamic model of vibratory and oscillatory roller,and the characteristics of each model.According to the characteristics of machine and solid,a new viewpoint about a kind of multi2free degree dynamic model which was suited for the vibratory and oscillatory roller was put forward.K ey w ords:roller;vibration;oscillation;dynamic model压路机是高速公路、铁路、水坝和机场等大型工程基础施工中不可缺少的压实机械。
压路机的发展经历了从机械传动到液压传动,由静碾到振动,由振动、振荡到振动振荡相结合的不同阶段。
目前正朝着智能化的方向发展[1]。
振动振荡压路机是在振动压路机的基础上发展起来的一种新型压实机械。
它的突出优点是调节工作轮可以实现由振动向振荡的转换,反之亦然。
研究振动振荡压路机的动力学模型,能够使我们了解振动振荡压路机的工作状况、模拟它的工作过程,从而为整机的设计提供准确的依据。
各国的专家和学者对压路机振动压实与振荡压实系统的动力学模型都进行了深入的研究,本文仅介绍几种具有代表性的动力学模型。
收稿日期:2002210208。
作者简介:田丽梅(1973-),女,吉林长春人,博士研究生。
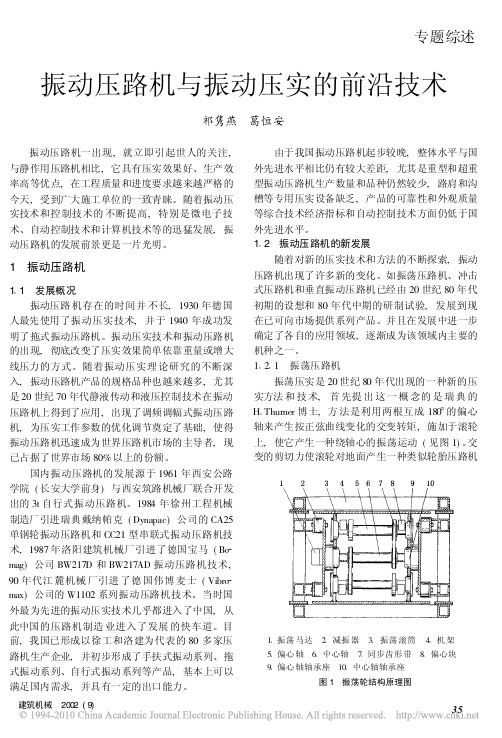
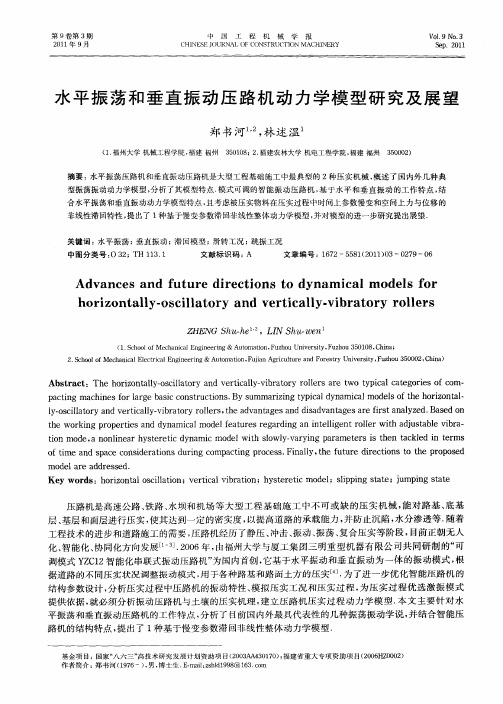
1 二自由度振动压路机2土壤系统动力学模型T.S.Y oo 和E.T.Seling [2]于20世纪70年代针对振动压路机的振动系统提出了二自由度、线性、集中参数、弹簧2阻尼系统所描述的土壤2压路机系统动力学模型,可称之为经典动力学模型,见图1。
图1 二自由度土壤2压路机系统动力学模型Fig.1 Two free 2degree dynamic model of soil 2vibratory roller其动力学方程为:m 1x ・・1+(c 1+c 2)x ・1+(k 1+k 2)x 2-c 2x ・2-k 2x 2=Fm 2x ・・2+c 2x ・2+k 2x 2-c 2x ・1-k 2x 1=0(1)式中:m 1、m 2分别为振动轮和机架的质量,kg ;x 1、x 2分别为振动轮和机架的质心位移,m ;k 1、k 2分别为土壤和减振器的刚度,N/m ;c 1、c 2分别为土壤和减振器的阻尼,N ・s/m ;F 为激振力,N 。
该模型称之为“二自由度动力学模型”。
它计算简单,为振动压路机动力学参数的选择、研究各参数对振动压路机性能的影响以及合理评价振动压路机性能提供了理论依据。
但利用此模型进行理论分析的结果与实测结果相差较大。
这是因为:①在此模型中,压路机的压实对象具有很大的随机性,该模型将压实对象简化为具有线性变化的弹性体;②有的压路机本身就是一个多自由度的振动体,由于受计算因素的限制,而简化为具有2个自由度的“压路机2土壤”模型,这种处理方法也必然给理论分析带来一定误差,因此不能全面指导整机设计和性能研究等方面的工作。
2 分阶段振动压路机2土壤系统动力学模型同样在20世纪70年代末,法国学者Machet.J.M [3]也对振动压实系统进行了动力学理论分析。
他认为在振动压实过程中,有振动轮与地面的接地工况,也有振动轮跳离地面的工况。
其动力学模型如图2所示。
图2 分阶段振动压路机2土壤系统动力学模型Fig.2 Two 2dynamic model of vibratory roller 2soil system接地振压时的动力学方程为:m 1x ・・1+c 2x ・1+k 2x 1+F s -(m 1+m s )g =Fm s x ・・s +c 1x ・s +k 1x s =F sx s =x 1起跳后的动力学方程为:m 1x ・・1+c 2x ・1+k 2x 1-(m 1+m 2)g =Fm s x ・・s +c 1x ・s +k 1x s =0式中:m s 为随振土体的质量,kg ;x s 为随振土体质心的位移,m ;F s为振动轮对土壤的振动力,N 。
该模型指出:①振压系统有接地振压和跳振振压两种工况;②振动压实系统可近似用一个离耦的2自由度动力学模型描述。
系统的第一阶振型主要反映了机架与减振器的特性,对减振效果影响较大;③系统的第二阶振型主要反映了碾轮与土体的特性,并随土体性质及密实度的不同而变化,对压实效果影响较大。
・101・第2期田丽梅等:国内外振动振荡压路机动力学模型3 单自由度振荡压路振荡轮2土壤系统动力学模型振荡压实的思想起源于20世纪80年代的瑞典。
振荡压实就是利用钢轮的扭转力矩在被压材料上图3 单自由度振荡压路机振荡轮2土壤系统动力学模型Fig.3 Single 2free 2degree dynamic model of oscillatory roller 2soil system 施加交变减应力,即对被压材料产生一个水平揉搓的作用。
这种水平揉搓作用可以提高路面面层的平整度和密实性,防止压坏骨料,并且消耗功率较小,约为振动压实的50%[4]。
由于振动压实与振荡压实工作原理不同,套用振动压路机的动力学模型研究振荡压实的动力学过程显然是不可行的。
为此瑞典的“G eodynamik AB ”公司的H.Thurner 博士[5]建立了振荡压路机的振荡轮动力学模型,转化为“单自由度系统”,如图3所示。
振荡轮的动力学方程为:J 0R 2x ・・+c s x ・+k s x =F sin ωt 式中:J 0为滚轮绕O 点的转动惯量;x 为滚轮水平振动位移;R 为滚轮半径;k s 为介质的刚度,N/m ;c s 为介质的阻尼,N ・s/m 。
该模型简单易懂,并能够对振荡压路机的动态响应进行定性分析。
可以很好地解决作用力及振幅的问题。
但是,该模型忽略了振荡压路机的水平位移,在研究时做了大量的简化,特别是没有考虑振荡轮与地面之间的滑转问题[6,7],因而无法解释在实验中得到的一些重要现象。
4 分阶段振荡压路机2土壤系统动力学模型针对H.Thurner 博士所建的动力学模型,原西安公路学院孙祖望[6]等在实验的基础上,考虑了滑图4 振荡轮与地面相互作用的动力学模型Fig.4 Interation dynamic model of oscillatory roller 2soil system转在滚轮与地面相互作用的动力学过程中的作用,建立了一个“分阶段的动力学模型”。
该模型的最大特点是以有无滑转作为临界条件,将工作轮的动力学模型划分为“连耦2双自由度”模型,当激振力增大至振荡轮与地面间的静摩擦力时,滚轮与地面间发生滑转,而滚轮则继续向同一方向摆动,直至达到最大摆角并开始向反方向摆动时重新与地面连耦。
简化的动力学模型如图4所示。
该动力学模型是一个双自由度的强迫振动系统。
在激振力矩的作用下,迫使滚轮做绕其轴心O 的摆振运动。
这时激振力矩一部分消耗在克服滚轮摆振运动的惯性力矩上,另一部分则使滚轮与其支撑面间产生摩擦力。
这一摩擦力一方面将引起地面的基础材料产生一定的剪切变形,另一方面则作用在滚轮上引起轮心产生一定的水平位移。
在激振力矩很小的情况下,滚轮在激振力和摩擦力的共同作用下将沿着支撑面做无滑转的纯滚动,滚轮与滑板(代表参与振动的基础材料)通过弹性元件与固定不动的机架和大地连成一个统一的振动系统[8]。
随着激振力的增大,摩擦力也随着增加。
当摩擦力增大至它的极限力(静摩擦力)时,滚轮将开始在支撑面上打滑,从而打破了滚轮与地面的固定联系而发生脱耦。
此时,滚轮将在外力的作用下完成某种独立的运动。