《机械设计基础》第八章-轮系解析教学内容
机械设计基础——轮系
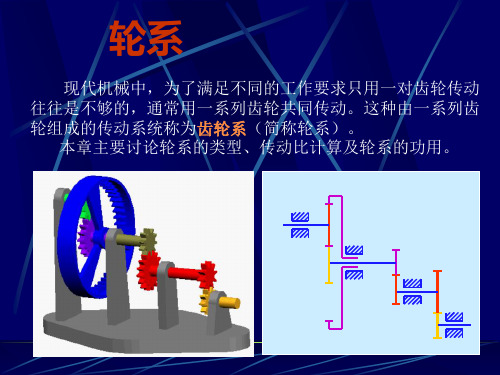
现代机械中,为了满足不同的工作要求只用一对齿轮传动 往往是不够的,通常用一系列齿轮共同传动。这种由一系列齿 轮组成的传动系统称为齿轮系(简称轮系)。
本章主要讨论轮系的类型、传动比计算及轮系的功用。
齿轮系的类型
1.按组成轮系的齿轮(或构件)的 轴线是否相互平行可分为: 平面轮系和空间轮系
2.根据轮系运转时齿轮的轴线位置 相对于机架是否固定可分为两大类: 定轴轮系和周转轮系
3.对于差动轮系,必须给定n 1 、 n k 、n H中任意两个(F=2,
两个原动件),运动就可以确定。对于简单周转轮系,有一太
阳轮固定(n k=0),在n 1 、n H只需要给定一个(F=1,需要一
个原动件),运动就可以确定。
例:如图所示的周转轮系中,已知各 轮齿数为Z1=100, Z2=99, Z3=100, Z4=101 ,行星架H为原动件,试求传 动比iH1=?
齿数连 乘积 齿数连 乘积
注意:
1.公式只适用于平面周转轮系。正、负号可按画箭头的方法来 确定,也可根据外啮合次数还确定(-1)m。对于空间周转轮 系,当两太阳轮和行星架的轴线互相平行时,仍可用转化轮系 法来建立转速关系式,但正、负号应按画箭头的方法来确定。
2.公式中的“+”、“-”号表示输入和输出轮的转向相同或相反。
Z2 Z4 Z1 Z3
n H = - 50/6 r/min 负号表示行星架与齿轮1转向相反。
2.求n3
:(n3
i1H2
=
nn21)- n H
n
-
2
n
H
Z2 Z1
n 2 = - 133 r/min = n3
负号表示轮3与齿轮1转向相反。
混合轮系传动比的计算
机械设计基础第八章

27
蜗杆蜗轮啮合
n1 z 2 i12 n2 z1
方向如图中箭头所示
28
定轴轮系
n1 i14 ? n4
29
n1 z2 i12 n2 z1
i23 z3 n2 n3 z2
n3 z4 i34 n4 z3
30
n2 n2
n1 n2 n3 i12 i23 i34 n2 n3 n4 z3 z2 z4 ( ) ( ) z1 z 2 z3
时针(h)
分针(m)
12
滚齿机:实现轮坯与滚刀范成运动。轴I的运动和 动力经过锥齿轮1、2传给滚刀,经过齿轮3、4、5、 6、7和蜗杆传动8、9传给轮坯。
13
6. 运动的合成和分解
运动的合成 将两个独立的转动合成为一个转动。 运动的分解 将一个转动分解成两个独立的转动。
14
二、轮系的分类
根据轮系在传动中各齿轮轴线的 位置是否固定,将轮系分类。
A 13
z2 z3 101 99 (1) z1 z2 100 100 n1 101 99 1 1 nA 100 100 10000
2
iA1 nA n1 10000
系杆转10000圈,齿轮1同向转1圈 四个齿轮的齿数相差不多,但可得到大的传动比
52
如果齿轮3的齿数由99改为100
注意的问题
(1)n1、nk、nH必须 是轴线平行的相应构 件的转速; (2)各转速代入公式 时,应带有本身的正
n1 nH i nk nH
H 1k
号或负号。
49
例题6 如图所示行星轮系,各轮 齿数为z1=40, z2=20,z3=80。 试计算中心轮1和系杆H的传动 比i1H。
机械设计基础轮系

单元8 轮系 精品文档
退出
首页
任务1 定轴轮系传动比计算
2.一对(yī duì)定轴齿轮传动比的 计算
(1) 传动比的计算
齿轮两轴的转速之比称为传动比。因为转速n=2πω,因此传动比又可以被表示为两轴的角速度 之比。传动比用i表示。对轴1和轴2 的传动比可表示为:
i12nn1 2 1 2
式中,n1、ω1——齿轮1的转速、角速度; n2、ω2 ——齿轮2的转速、角速度。
定
轴
传动时,轮系中各齿轮的几何轴线位置都是固定的
轮
轮系称为定轴轮系,定轴轮系又称普通轮系。
系
周
传动时,轮系中至少有一个齿轮的几何轴线位置不固
转
定,而是绕另一个齿轮的固定轴线回转,这种轮系称为
轮
周转轮系。在右图轮系中,齿轮1、3的轴线固定,齿轮2
系
在H的作用下绕1、3的固定轴线回转。
组
既含有定轴轮系,又含有周转轮系或者含有多个周转
单元8 轮系 精品文档
退出
首页
任务2 周转轮系
1.周转(zhōuzhuǎn) 轮系概述
图8-10所示轮系中,齿轮1、3的轴线相重合, 它们均为定轴齿轮,而齿轮2的转轴装在构件H的端 部,在构件H的带动下,它可以绕齿轮1、3的轴 线作周转。
在运转(yùnzhuǎn)过程中至少有一个齿轮 几何轴线的位置不固定,而是绕着其它定轴齿 轮轴线回转的轮系,称为周转轮系。
线回转(也叫自转),又绕行
星架回转轴线OH回转(也叫公 转)。
退出
首页
任务2 周转轮系
3.周转(zhōuzhuǎn)轮系的 传动比
周转轮系传动时,行星轮做既有自转又有公转的复合运动,因此周转轮系传动比的计算 (jì suàn)方法不同于定轴轮系,但两者之间又存在着一定的内在联系。可以通过转化轮系的方 法将周转轮系转化成一定条件下的定轴轮系,从而采用定轴轮系传动比的计算(jì suàn)方法来 计算(jì suàn)周转轮系的传动比。
机械设计基础轮系

机械设计基础轮系在机械设计中,轮系的设计和布局是至关重要的。
轮系,或者称为齿轮系,是由一系列齿轮和轴组成的,它们通过精确的配合和排列,将动力从一个轴传递到另一个轴,或者改变轴的转速。
这种设计广泛应用于各种机械设备中,如汽车、飞机、机床等。
一、轮系的基本类型根据轮系中齿轮的排列和组合方式,我们可以将其分为以下几种基本类型:1、定轴轮系:在这种轮系中,齿轮是固定在轴上的,因此轴的旋转速度是恒定的。
这种轮系主要用于改变动力的大小和方向。
2、行星轮系:在这种轮系中,有一个或多个齿轮是浮动的,它们可以随着轴一起旋转,也可以绕着轴旋转。
这种轮系主要用于平衡轴的转速和改变动力的方向。
3、差动轮系:在这种轮系中,有两个或多个齿轮的旋转速度是不一样的,它们之间存在一定的速度差。
这种轮系主要用于实现复杂的运动规律。
在设计轮系时,我们需要遵循以下原则:1、确定传递路径:根据机械设备的需要,确定动力从哪个轴输入,需要传递到哪个轴。
2、选择合适的齿轮类型:根据需要传递的动力大小、转速等因素,选择合适的齿轮类型(直齿、斜齿、锥齿等)。
3、确定齿轮的参数:根据需要传递的动力大小、转速等因素,确定齿轮的模数、齿数、压力角等参数。
4、确定齿轮的排列方式:根据需要实现的传动比、转速等因素,确定齿轮的排列方式(串联、并联等)。
5、确定轴的结构形式:根据需要传递的动力大小、转速等因素,确定轴的结构形式(实心轴、空心轴、悬臂轴等)。
6、确定支承形式:根据需要传递的动力大小、转速等因素,确定支承形式(滚动支承、滑动支承等)。
7、确定润滑方式:根据需要传递的动力大小、转速等因素,确定润滑方式(油润滑、脂润滑等)。
在满足设计要求的前提下,我们还可以通过优化设计来提高轮系的性能。
以下是一些常用的优化方法:1、优化齿轮参数:通过调整齿轮的模数、齿数、压力角等参数,来提高齿轮的承载能力和降低噪声。
2、优化齿轮排列:通过优化齿轮的排列方式,来提高传动效率、降低传动噪声和减少摩擦损失。
机械设计基础轮系

2/50
将一系列相互啮合的齿轮组成传动系统,以实现变速、
换向、大传动比、分路传动、运动分解与合成等功用。
这种由一系列齿轮组成的传动系统称为轮系。
机械基础教研室 孙雅萍
高校教育精品PPT
CHANGCHUN INSTITUTE OF TECHNOLOGY
School of Mechatronics Engineering
高校教育精品PPT
CHANGCHUN INSTITUTE OF TECHNOLOGY
School of Mechatronics Engineering
14/50
已知各齿轮的齿数Z1=20, Z2=42, Z2′=19, Z3=68, Z3′=18, Z4=19, Z5=35。齿轮1为主动轮,转向如图所示,转速 n1=100r/min,试求:传动比i、齿轮5的转速和方向。
机械基础教研室 孙雅萍
CHANGCHUN INSTITUTE OF TECHNOLOGY
School of Mechatronics Engineering
6/50
例
i12
n1 n2
Z2 Z1
i2/3
n2 n3
Z3
Z
/ 2
i3/ 4
n3 n4
Z4
Z
/ 3
i45
n4 n5
Z5 Z4
机械基础教研室
i 15
3/50
轮系的分类
定轴轮系
机械基础教研室 孙雅萍
行星轮系
高校教育精品PPT
CHANGCHUN INSTITUTE OF TECHNOLOGY
School of Mechatronics Engineering
4/50
机械设计基础之轮系详解

机械设计基础之轮系详解在机械工程中,轮系的设计与使用至关重要。
轮系主要由一系列相互啮合的齿轮组成,通过齿轮的旋转运动,可以实现动力的传输、速度的改变、方向的转换等功能。
本文将详细解析轮系的基本概念、类型及设计要点。
一、轮系的类型根据齿轮轴线的相对位置,轮系可以分为两大类:平面轮系和空间轮系。
1、平面轮系:所有齿轮的轴线都在同一平面内。
这种类型的轮系在机械设计中最为常见,包括定轴轮系、周转轮系和混合轮系。
2、空间轮系:齿轮的轴线不在同一平面内,而是相互交错。
这种类型的轮系相对复杂,包括差动轮系和行星轮系。
二、定轴轮系定轴轮系是最简单的轮系类型,所有齿轮的轴线都固定在同一轴线上。
这种轮系的主要功能是通过齿轮的旋转实现动力的传输和速度的改变。
定轴轮系的传动比可以根据齿轮的齿数和转速计算得出。
三、周转轮系周转轮系的齿轮轴线可以绕着其他齿轮的轴线旋转。
这种轮系的主要功能是通过齿轮的旋转实现动力的传输和速度的改变,同时还能实现方向的转换。
周转轮系的传动比可以根据齿轮的齿数和转速计算得出。
四、混合轮系混合轮系是定轴轮系和周转轮系的组合。
这种轮系的优点是可以实现更复杂的运动和动力传输,同时具有较高的传动效率。
混合轮系的传动比可以根据定轴轮系和周转轮系的传动比计算得出。
五、差动轮系差动轮系是一种空间轮系,其特点是两个齿轮的轴线可以不在同一平面内。
这种轮系的主要功能是通过齿轮的旋转实现动力的传输和速度的改变,同时还能实现方向的转换。
差动轮系的传动比可以根据齿轮的齿数和转速计算得出。
六、行星轮系行星轮系是一种空间轮系,其特点是至少有一个齿轮的轴线可以绕着其他齿轮的轴线旋转。
这种轮系的主要功能是通过齿轮的旋转实现动力的传输和速度的改变,同时还能实现方向的转换。
行星轮系的传动比可以根据齿轮的齿数和转速计算得出。
七、设计要点在设计和使用轮系时,需要考虑以下几点:1、传动比:根据实际需求选择合适的传动比,以保证轮系的传动效率和稳定性。
《机械设计基础》第8章 齿轮系
48 24 4 48 18 3
250 H 4 100 H 3
H 2
2
1
2‘ H
3
3H
3
1
H 1
H 50
周转轮系传动比计算方法小结:
定轴齿轮系
平面定轴齿轮系 空间定轴齿轮系
二.行星齿轮系
1. 定义
在齿轮系运转时,若至少有一个齿轮的几何轴线 绕另一齿轮固定几何轴线转动,则该齿轮系称为行星 齿轮系(如图8-3)。它主要由行星齿轮、行星架(系 杆)、和中心轮所组成。
2. 基本构件
行星齿轮系中由于一般都以中心轮和行星架作 为运动的输入或输出构件,故称它们为行星齿轮系 的基本构件
上角标 H
周转轮系
-w
H
正负号问题
转化机构:假想的定轴轮系
i1H n 1 n H i1n
计算转化机构的传动比 计算周转轮系传动比
1H z 2 z n i H z1 z n1 n
H 1n
i1 n 1
n
例题8-2 :
一差动齿轮系如图 所示,已知个轮齿数为: z1 16, z 2 24, z3 64, 当轮1和轮3的转速为:
式中:G为主动轮,K为从动轮,中间各轮的主 从地位也应按此假定判定。m为齿轮G至K间外啮合 的次数。
求行星齿轮系传动比时,必须注意以下几点:
(1) nG , K ,nH 必须是轴线平行或重合的相应齿轮的 n 转速。 (2)将nG,nK,nH 的已知值代入公式时必须带正 号或负号。
H (3) i GK i GK。 i GK为转化机构中轮G与K的转速之 比,其大小与正负号应按定轴齿轮系传动比的计算 方法确定。
机械设计基础 轮系ppt课件
1、用标注箭头来确定;
2、通过数外啮合齿轮的对数来确定
外啮合齿轮的对数为偶数,则首末两轮转向相同 外啮合齿轮的对数为奇数,则首末两轮转向相反
可编辑课件PPT
30
如何表示一对平行轴齿轮的转向? 齿轮回转方向
用线速度方 向表示齿轮
线速度方向
回转方向
机构
运动 简图
投影方向
机构 运动 简图
投影方向
可编辑课件PPT
轮系传动比的计算包括传动比大小的计算和输入轴与 输出轴两者转向的关系的确定。传动比常用字母i表示 ,并在其右下角标明其对应的两轴。例如iAB表示轴A 与轴B的角速度之比。
iAB
A B
nA nB
可编辑课件PPT
39
二 定轴轮系传动比的计算
1.一对齿轮啮合时传动比的计算
1
1
2
1
1
2
2
2
外啮合圆柱齿轮,两轮
差动轮系(F=2)
行星轮系(F=1)
这种两个中心轮都不固
这种有一个中心轮固定,
定,自由度为2的周转轮系, 自由度为1的周转轮系,称
称为差动轮系。
可编辑课件PP为T 行星轮系。
14
复合轮系
轮系中,既有定轴轮系又有周转轮系
(跳过本页图形)。
可编辑课件PPT
15
哪部分是定轴轮系?(轴上有没有斜线)
周转轮系
1 1
2
1
1
2
2 2
外啮合:两轮转向相反 内啮合:两轮转向相同 注:箭头表示可见侧圆周速度方向。
可编辑课件PPT
35
一对圆锥齿轮传动转向的表达
1
1
2
2
两箭头同时指向啮合点 两箭头同时相背啮合点
机械设计基础轮系
z2 z1
=-2
其中n4=0 ,n2= n2 `
i1H = n1Βιβλιοθήκη /nH = -10 负号说明行星架H与齿轮1转向相反。
图示为一大传动比的减速器, Z1=100,Z2=101,Z2'=100,Z3=99 求输入件H对输出件1的传动比iH1
iH1
1 i1H
1
1 101 99
10000
100 100
i1H =-(1-99x101/100x100)=-1/10000 iH1=n H / n 1 =1/i1H =-10000
传动比为负,表示行星架H与齿轮1的转向相反。 用画箭头法标出转化轮系中各构件的转向关系,如图
例: 如图所示周转轮系。已知Z1=15, Z2=25, Z3=20, Z4=60,n1=200r/min, n4=50r/min,且 两中心轮1、4转向相反。试求行星架转速n
齿轮的转向 内啮合齿轮
齿轮的转向 直齿锥齿轮
齿轮的转向 蜗轮蜗杆机构
蜗杆传动,从动蜗轮转向判定 方法用蜗杆“左、右手法则”: ➢对右旋蜗杆,用右手法则, ➢使四指弯曲方向与蜗杆转动 方向一致, ➢与拇指的指向相反的方向就 是蜗轮在节点处圆周速度的方 向。
对左旋蜗杆,用左手法则,方法同上。
二、定轴轮系的传动比
轮3固定
二、周转轮系的传动比
(转化机构法)
周转轮系 反转法
定轴轮系 (转化机构)
定轴轮系传动比 计算公式
求解周转轮系的 传动比
➢假想对整个行星轮系加 上一个与行星架转速nH大 小相等而方向相反的公共 转速-nH
➢这样,就变成了假想的 定轴轮系。
➢经过转化的假想定轴轮 系,称为转化轮系。
周转轮系及转化轮系中各构件的转速
机械设计基础之轮系详解
引言:轮系是机械设计中的重要概念之一,它由多个齿轮组成,通过齿轮之间的传动使机械运动实现不同的速度和扭矩转换。
本文将着重介绍轮系设计中的一些基本概念以及其应用。
希望通过对轮系的详细解析,能够帮助读者更好地理解和应用机械设计中的轮系。
概述:轮系设计是机械设计中不可或缺的一部分,它是实现传动以及速度和扭矩转换的基础。
轮系设计的关键在于正确选择和组合齿轮,使其能够满足特定的要求。
因此,本文将从多个方面对轮系设计进行详细的阐述和解析。
正文内容:一、齿轮的基本参数1.1齿轮的模数和齿数1.2齿轮的压力角和齿廓1.3齿轮的材料和硬度要求1.4齿轮的螺旋角和端面修形1.5齿轮的轴向间隙和侧隙二、轮系传动的基本原理2.1齿轮的基本传动原理2.2轮系传动效率的计算2.3齿轮的啮合条件和啮合传动比2.4齿轮的传动误差和间隙2.5齿轮传动的轴向力和弯矩三、常见轮系的应用3.1平行轴齿轮传动的设计要点3.2相轴齿轮传动的设计要点3.3斜齿轮传动的设计要点3.4高速齿轮传动的设计要点3.5高扭矩齿轮传动的设计要点四、齿轮设计中的优化方法4.1先进的齿轮设计方法4.2齿轮的强度和寿命计算4.3齿轮的噪声和振动控制4.4齿轮的润滑和附加损失4.5齿轮装配和调试技巧五、齿轮设计的实际案例分析5.1汽车变速器的齿轮设计5.2工业机械设备的齿轮设计5.3风力发电机的齿轮设计5.4船舶传动系统的齿轮设计5.5机械手臂的齿轮设计总结:轮系是机械设计中不可或缺的重要部分,通过合理的齿轮选择和设计,可以实现不同速度和扭矩的转换。
本文详细介绍了轮系设计中的基本参数、传动原理、常见应用、优化方法以及实际案例分析。
希望读者能够通过本文的阐述,更好地理解和应用机械设计中的轮系,为实际工程项目提供参考和指导。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
多级传动比传动
当主动轴转速不变时,利用轮系可使从动轴获得多 种工作转速。
8.5轮系的应用
三、获得大的传动比
行星轮系
i12
n1 n2
z2 z1
,n2
n1zz12
i23n n2 3zz2 3 ,n3n2 zz3 2 n1zz1 2zz3 2 i3 4n n 3 4 z z3 4 ,n 4 n 3 z z4 3 n 1 z z1 2 z z2 3 z z4 3
i4 5 n n 5 4 z z 5 4,n 5 n 4 z z 5 4 n 1 z z 1 2 z z 3 2 z z 4 3 z z 5 4
i1H3 (1)1
n1 n3
z2z3 z1z2
nH 对转臂H的相对转速
nH z3
n1 nH n3 nH
z1
z3 z1
8.3周转轮系及其传动比
一般情形: 特别注意转速的正负号
n n G K n n H H 1 m 从 从 动 动 轮 轮 G G 至 至 K K 间 间 所 所 有 有 从 主 动 动 轮 轮 齿 齿 数 数 的 的 乘 乘 积 积
n1 nH z3
n3 nH
z1
n1 nH 61 0 nH 27
i1H
n1 nH
1613.26 27
设n1的转向为正,则 nHin 1H 1 630.20601840r/min nH的转向和n1相同
8.3周转轮系及其传动比
还可以计算出行星齿轮2的转速n2:
n1 nH z2
n2 nH
1,3-中心轮(太阳轮)
系杆和两个中心轮的几何轴线必 需重合,否则不能转动。
8.3周转轮系及其传动比
二、周转轮系传动比的计算
转化轮系 (加公共转速-nH)
构件
原来的转速
转化轮系中 的转速
1
n1
n1H n1 nH
2
n2
n2H n2 nH
3
n3
n3H n3 nH
H
nH
nH HnHnH0
i1H3
n1H n3H
8.2定轴轮系及其传动比
轮系的传动比为:i15
1 5
n1 n5
z2 z1
z3 z2
z4 z3
zz54
i12i23i34i45
(1)3
z2z3z4z5 z1z2z3z4
z2z3z5 z1z2z3
定轴轮系的传动比等于组成轮系的各对啮合齿轮传动比 的连乘积,也等于各对齿轮传动中的从动轮齿数的乘积 与主动轮齿数的乘积之比;
而首末两轮转向之相同或相反(传动比的正负)则取决 于外啮合的次数。
传动比的正负号,还可在图上根据内啮合(转向相同)、 外啮合(转向相反)的关系,一次画上箭头来确定。
8.2定轴轮系及其传动比
➢推广到一般情况: 设1、N为定轴轮系的第一主动轮和最末从动轮, m为外啮合次数。
i1Nn n N 1 1m所 所 有 有 从 主 动 动 轮 轮 齿 齿 数 数 的 的 乘 乘 积 积
齿轮1、3和转臂H的轴线重 合,故
n1 nH z2z3
n3 nH
z1z2
1,3转向相反
设n1的转向为正,则
50nH 3080 0nH 2050
得 nH14.7r/min n2不能用此方法计算
nH转向和n1转向相同
8.4混合轮系及其传动比
差 动
z1=24
混 合 轮 系
轮
z2=52
将 方系各 程个式轮,系联正立确 求区 解分 。定轴轮系,zzzz分2334'='===别73218018列出求各轮i1H系的
一对齿轮的传动比
i12=
1 2
n1 n2
±z2 z1
*对于平面齿轮: “+”号表示内啮合,两轮转向相同, “-”号表示外啮合,两轮转向相反。
✓轮系中,首末两齿轮的角速 度之比称为该轮系的传动比。
8.2定轴轮系及其传动比
图示的定轴轮系中,Ⅰ为第一 主动轴,Ⅴ为最末从动轴。
轮系中各传动比的关系:
Ⅴ
(n2 n2,n3n3)
《机械设计基础》第八章-轮系 解析
8.1轮系的类型 分类:(1)定轴轮系
1
2
3
4
2'
4' 5
定轴轮系:当齿轮系转动时,其中各齿轮的轴线 相对于机架的位置都是固定不动的。
8.1轮系的类型
(2)周转轮系
2 2 3
H H
1
1
3
8.1轮系的类型
讨论:针对各种轮系模型,讨论应用场合。
8.2定轴轮系及其传动比
z5=78
- 差动轮系中 n1 nH Z2Z3 5278
n3 nH
Z1Z2
2421
定轴轮系中
i35
n3 n5
z5 z3
78 18
n3
13 3
nH
代入上式,得
n1 nH 169
13 3
nH
nH
21
i1H 43.9
8.5轮系的应用
一、相距较远的两轴之间的传动
较远距离传动
8.5轮系的应用
z1
60001840 17 n2 1840 27
解得: n24764r/m in
负号表示n2的转向与n1相反。
8.3周转轮系及其传动比
例:图示圆锥齿轮组成的行星轮系中,各轮的齿数为:
z 1 2 0 ,z 2 3 0 ,z 2 5 0 ,z 3 8 0 ,已知n1=50r/min。求转 臂H的转速nH。
如果定轴轮系中有圆锥齿轮、交错轴斜齿轮或 蜗轮蜗杆等空间齿轮,其传动比大小仍可用上 式计算,在图上用箭头表示各齿轮的转向。
8.2定轴轮系及其传动比
例:图中所示的轮系中,z 1 1 6 ,z 2 3 2 ,z 2 2 0 ,z 3 4 0 , z3 2(右 旋 ),z440,若n1=800r/min,求蜗轮的转速n4 及各轮的转向。
i14n n1 4zz1 2zz2 3z z3 4 3 1 2 6 4 2 0 0 4 2 080
n4in14 1
180010r/min 80
8.3周转轮系及其传动比
差动轮系
一2-行星轮
每个单一的周转轮系具有一个系 杆,中心轮的数目不超过二个。
H-转臂(系杆)
➢应用上式时,应令G为主动轮,K为从动轮,中 间各轮的主从地位也按此假设判定。
➢只适用于齿轮G、K和转臂H的轴线相互平行的 场合。
➢上述这种运用相对运动原理,将周转轮系转化成 假想的定轴轮系,然后计算其传动比的方法,称为 相对速度法或反转法。
8.3周转轮系及其传动比
例:图示行星轮系中,各轮的齿数为:z1=27,z2=17,z3=61。 已知n1=6000r/min,求传动比i1H和转臂H的转速nH。